EILog井径测井仪偏心校正技术研究及应用*
2023-12-16党益伟刘李春罗成龙王志磊陈金明吴学涛田博宁
王 辉,杨 凯,党益伟,刘李春,罗成龙,王志磊,贺 剑,陈金明,吴学涛,王 炜,宗 飞,田博宁
(1.中国石油集团测井有限公司物资装备公司中部中心 陕西 西安 710201; 2.中国石油集团测井有限公司长庆分公司 陕西 西安 710201)
0 引 言
中国石油集团测井有限公司自主研发生产的EILog井径测井仪在直井内能够测得较为准确的井径值,可以用来测量钻孔直径,提供井眼不规则程度数据,还可根据钻孔的不规则形态,分析判断地下岩层裂缝的发育程度和裂缝的方向[1-5]。井径测量结果还可以在许多定量解释中配合其他测井资料进行井眼影响校正,如冯琳伟等用井径值对高分辨率双侧向曲线进行井眼校正[6]。因此井径曲线的准确性对后续的其他测井资料解释意义重大。然而,EILog井径测井仪在长庆油田的大斜度井和水平井测井过程中出现严重的缩径现象,所测的井径值误差大于5%,超出井径资料的误差要求,急需对其进行改进和偏心校正处理。
目前对于测井偏心校正的研究,多集中在固井质量测井和双侧向等测井项目,如曾桂红研究了水平井固井质量测井中偏心模型下井孔声场分布,明确了偏心距与套管波幅度间的关系,形成了适用于扇区水泥胶结测井的水平井固井质量评价偏心校正技术[7]。徐建华等研究了水平井中双侧向测井仪在井内偏心时产生的电位偏心格林函数,通过数值计算,最终绘制了深、浅侧向的偏心井眼校正图版[8]。
关于井径测井仪的偏心校正研究较少,周琦等认为井径缩径的根本原因在于测井仪自重过大,导致井径臂受到的压力大于井径臂弹簧的支撑力,造成测井仪没有居中,使得测量没有得到补充[9]。历程军等根据四点定圆求解并刻度四臂井径,并进行水平井校正[10],但未在EILog井径测井仪中应用。目前国内外水平井小井眼测井仪,如吉艾、威德福、胜利伟业等公司生产的井径测井仪,基本都采用机械扶正来克服测井仪偏心问题,但还未见开展本论文相关的偏心校正技术研究。
1 EILog井径测井仪存在的问题
1.1 结构问题
EILog井径测井仪由两组互成直角(X方向与Y方向)的井径臂组成,其中的任何一个井径臂可以独立运动,与其相连的电位器与对立的一个井径臂的电位器串联,如图1所示,再将两两串联的两组电位器阻值转化成电压信号,经连斜电子线路处理计算得到井径数据。

图1 EILog井径测井仪测量原理简图
该井径测井仪的结构导致测井仪只能测得X方向或Y方向总的井径值,而无法测得X方向或Y方向具体某一个井径臂的值,因此如果处于偏心状态,其中一条井径臂被压缩,虽然该方向的总的井径值变小,但具体是该方向中两条井径臂中的哪一条臂被压缩,在井径曲线中无法得知。并且根据圆的几何定律,根据圆上的两条相互垂直的线段各自的总长度(即对应两条相互垂直的井径值),是无法求得该圆的半径及直径的,即无法测得井眼的直径,故无法进行偏心校正。
1.2 井径臂弹簧问题
EILog井径仪存在井径臂弹簧弹力较小的问题,在水平井或大斜度井中,测井仪受到自身重力的作用,井径臂弹簧的弹力较小,没有足够的弹力将井径臂张开,导致偏心严重,所测井径值误差较大。
1.3 刻度器问题
EILog井径仪的刻度器为2个直径分别为30.48 cm与20.32 cm的独立的刻度环,该刻度环在井径臂张开后刻度时,极易出现偏心,测井仪不居中,由此造成刻度值不准确的问题。
1.4 电位器固定架问题
EILog井径仪的4个电位器通过固定架上的螺丝进行固定,该固定架经常出现松动现象,在测井过程中电位器位置移动,从而引起电阻值变化,造成井径曲线测量不准确的问题。
2 EILog井径仪偏心校正技术研究
2.1 EILog井径仪偏心试验
通过室内试验模拟测井仪处于不同大小井眼中的不同偏心状态,从而将测井仪偏心影响量化。模拟两种偏心状态:状态1,测井仪所受压力与一条井径臂重合,如图2所示;状态2,测井仪所受压力与井径臂不重合(在2条井径臂之间),如图3所示。
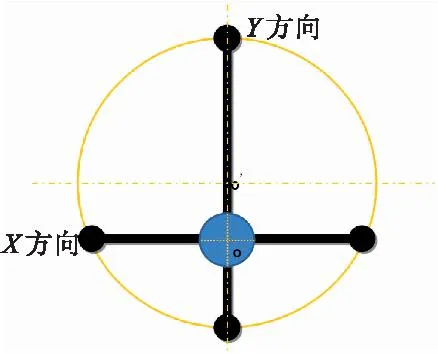
图2 模拟状态1示意图

图3 模拟状态2示意图
模拟结果见表1,测井仪居中时误差小于5%,而处于偏心状态时误差均大于5%,由此可知井径无论处于何种偏心状态,其误差均大于井径测井质量要求的5%,且偏心越严重,所测井径值误差越大。实际测井中也得到证实,井眼倾角越大,测井仪偏心越严重,所测井径值误差也越大。

表1 EILog井径测井仪偏心模拟试验结果
综上所述,在大斜度井和水平井测井中,EILog井径仪所测的井径值误差较大,所测曲线缩径严重,不能满足测井要求。随着水平井开发力度的加大,有必要开展井径偏心校正技术研究。
2.2 偏心校正理论方法
井径偏心校正“四点定圆”原理如图4所示。
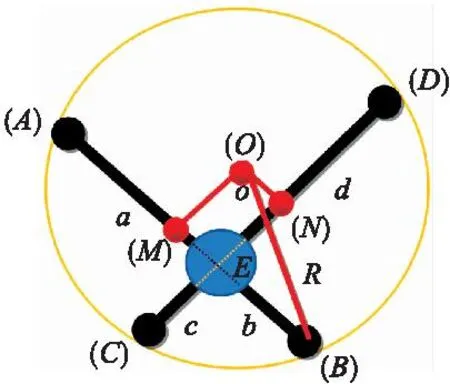
图4 井径偏心校正“四点定圆”原理图
EILog井径仪4条井径测量臂与井眼相交于A、B、C、D四点,4条井径数值大小分别为a、b、c、d,采用 “四点定圆” 方法确定井筒横切面,从而计算出圆的直径,计算过程如下:
OM2+BM2=OB2=OA2=R2
(1)
式中:O为圆心,OM为AB的垂直平分线,ON为CD的垂直平分线,R为圆的半径。
OM=EN=CN-c=((c+d)/2)-c=(d-c)/2
(2)
BM=(a+b)/2
(3)
推出圆的直径CAL为:

(4)
同法可推出:


(5)
由此可知,只需分别测得井径仪偏心时的4个独立臂的大小,便可通过四点定圆计算出实际的井径值,从而实现偏心校正。
2.3 测井仪技术改进
2.3.1 机械结构改进
对现有的EILog井径测井仪结构进行改进,将原井径中相对立的2组串联的电位器相互独立,实现4条井径独立运动,同时电阻值也相互独立变化,图5和图6分别为改进前和改进后的原理框图。由图可见,原来2组两两串联的电位器改进为相互独立的4组电位器,从而实现了4条井径臂运动时在电位器上的独立变化。
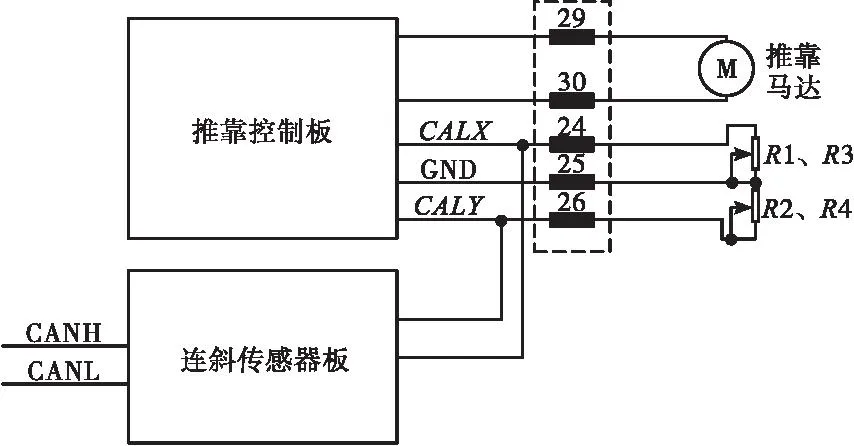
图5 改进前的EILog井径测井仪原理框图
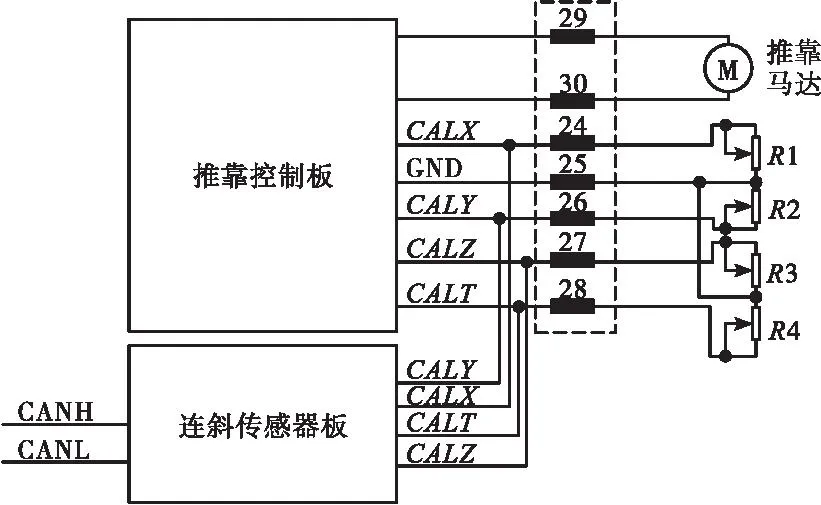
图6 改进后的EILog井径测井仪原理框图
2.3.2 采集电路改进
电位器电阻的变化引起4组电压的变化,原来的采集电路只能采集2路电压变化,故还需对井径仪的采集电路进行改进。将2组井径值的两通道数据采集电路改为四通道数据采集电路,图7为改进后的采集电路原理框图,图中模拟信号采集通道1、2、3、4分别为4条井径的采集电路,其中虚线方框内为新增的2道采集电路。
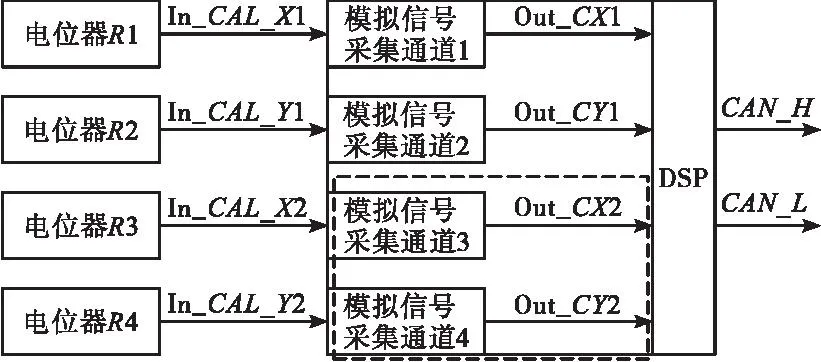
图7 改进后的EILog井径测井仪4通道采集电路原理框图
2.3.3 动态库(软件)的改进
与机械结构、电路的改进相对应,测井动态库(软件)也需做出相应的改进。编写相对应的动态库,部分程序代码如图8所示。该动态库软件将采集到的4组井径值进行“四点定圆”算法的偏心校正计算,最终获得经偏心校正后的井眼尺寸。
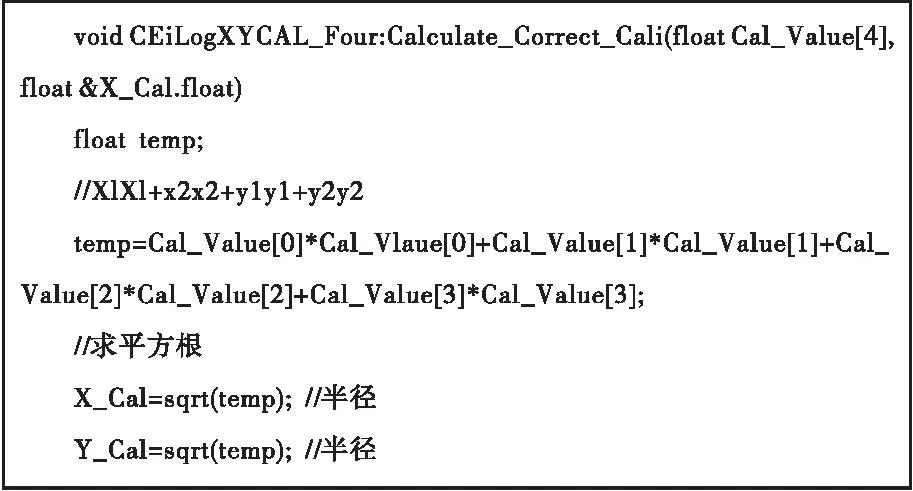
图8 改进后的EILog井径测井仪“四点定圆”动态库程序(部分)
2.3.4 井径臂弹簧的改进
采用弹力更大的弹簧作为井径臂弹簧,使得井径仪在大斜度井或水平井中处于偏心状态下井径臂有更大的支撑力,使测井仪尽可能居中,减少测井仪偏心程度。
弹簧的弹性系数公式如下:
(6)
式中:c为弹簧的刚度,即弹性系数,又叫倔强系数k;
F为弹簧所受的载荷;
λ为弹簧在受载荷F时所产生的的变形量;
G为弹簧材料的切变模量;
d为弹簧丝直径;
D2为弹簧直径;
n为弹簧有效圈数;
C为弹簧的旋绕比。
根据式(6)可知,弹簧的弹性系数与弹簧材料的切变模量和弹簧丝直径的4次方成正比,与弹簧直径的3次方和有效圈数成反比。在井径仪弹簧安装处空间有限且不易改变的情况下,即D2不变,为了增加井径臂弹簧的弹性,可采用切变模量更大的弹簧材质、更粗的弹簧丝直径、更少的弹簧有效圈数。其中,由于弹性系数与弹簧丝直径的4次方成正比,因此增大弹簧丝的直径,是效果最明显且最简便的方法之一。通过试验,将弹簧丝直径增大为原来的1.5倍时,弹性系数增大为原来的5倍,且该弹力为不改变直流电机的情况下,直流电机所能承担的最大负载。若再继续增大弹簧的弹性系数,原来的直流电机所能提供的动力已无法将井径臂完全收拢,且容易造成直流电机过于疲劳而损坏。因此,改进为原来弹簧丝直径1.5倍的弹簧,在增大弹簧弹力5倍的同时,又无需更换直流电机,是较为合适的方案。
2.3.5 刻度器的改进
原EILog井径仪刻度器为2个独立的刻度环,如图9(a)所示。将2个独立的刻度环做成一体式,中心为与测井仪直径大小相同的圆柱体,其外部为两层直径分别为20.32 cm和30.48 cm的圆柱体,如图9(b)所示。刻度时,与测井仪直径大小相同的圆柱体套在测井仪上可以使刻度器始终处于居中状态,有效解决了因刻度环偏心而引起的刻度不准确问题。

图9 改进前后的井径刻度器
2.3.6 电位器固定架的改进
将EILog井径测井仪的电位器固定架进行改进,采用两段卡死的结构对电位器进行固定,避免了因螺丝松动造成的电位器滑动,从而减少了因电位器位置移动造成的井径测值不准确问题。
3 室内实验
为了检验改进后的EILog井径测井仪偏心校正效果,进行室内刻度和偏心实验,计算其测量误差。实验中分别采用直径为30.48 cm的大环和直径为20.32 cm的小环对井径进行偏心试验,使不同的井径臂处于不同的压缩状态,模拟测井仪在大斜度井或水平井中所处的不同偏心状态,记录相应状态时的井径值,计算其误差,部分测试数据见表2。
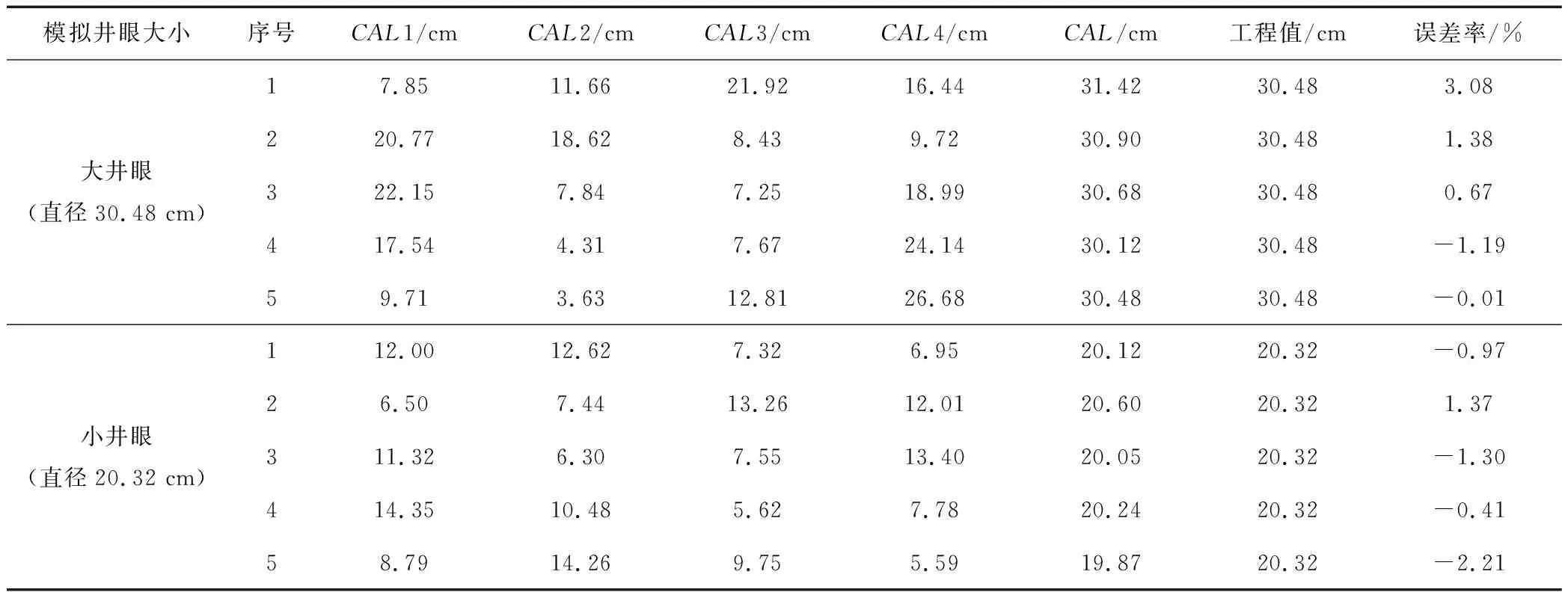
表2 改进后的EILog井径测井仪室内实验结果
由表2可以看出,无论是在大井眼(直径30.48 cm),还是小井眼(直径20.32 cm)中,无论处于何种偏心状态,经改进后的EILog测井仪(采用4点共圆偏心校正方法),所测的井径值误差全部小于5%,远小于改进前所测的井径值误差(表1),测量精度有显著提高,偏心校正效果显著,室内实验成功。
4 测井应用
室内实验成功后,将改进后的EILog井径测井仪进行测井验证。在苏里格气田某区块测井数十口,所测资料无论是在直井段,还是在井斜较大的井段误差均在允许的范围内,全部验收通过。选取其中任意一口井井斜较大井段的任意几个深度点的井径值进行误差计算,计算结果见表3,井斜在32°左右时,实测井径值与钻头直径的误差全部小于5%。
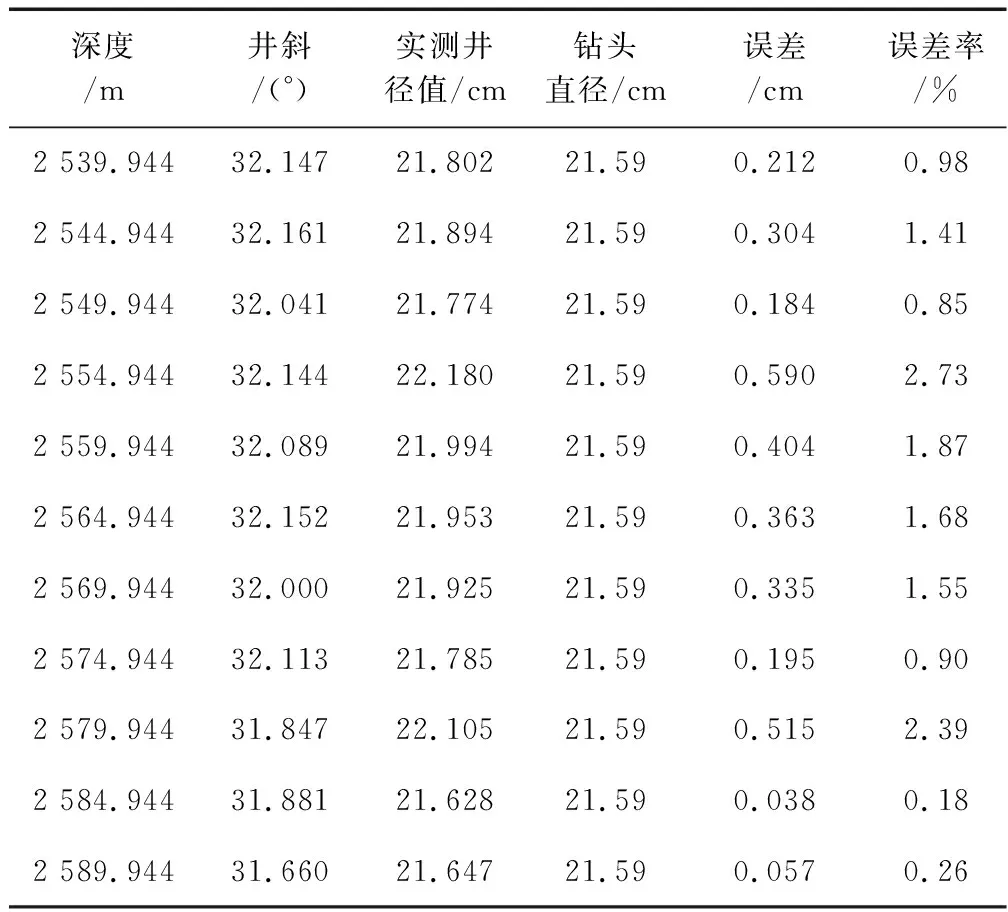
表3 改进后的EILog井径测井仪测井验证结果
综合该井2 530~2 630 m井段井径曲线,如图10所示,井斜31°~32°,大部分井段井径曲线与钻头尺寸较为接近,误差较小,无缩径。仅在2 530~2 538 m与2 585~2 595 m井段井径曲线出现比钻头尺寸大约3 cm左右的误差(误差13.9%),但经测井资料解释,该井段井径曲线与声波时差、双侧向等其他测井曲线有较好的对应关系,可能为扩井或井眼垮塌等真实井况的反映,整个井段无缩径等情况,符合该地区的地质特征。在后续的其他大斜度井和水平井测井中,改进后的井径测井仪所测井径值误差均在5%以内,在误差较大的井段,井径曲线也与其他曲线具有良好的对应关系,符合井眼垮塌等扩井的实际井况特征,因此改进后的井径测井仪具有较好的偏心校正效果。
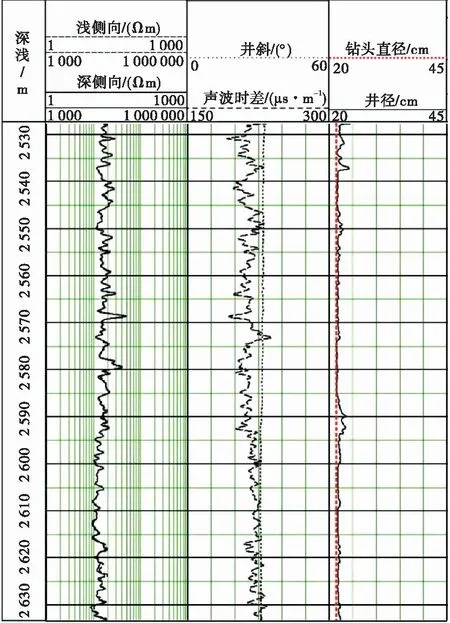
图10 改进后的EILog井径测井仪测井曲线
5 讨 论
本文中所采用的“四点定圆”方法由于理论模型限制,仅适用于圆形井眼且井眼规则情况下的测井仪偏心校正,对于井眼垮塌造成的非圆形井眼或不规则井眼不适用。对于井眼垮塌造成的非规则井眼,因为井眼垮塌具有随机性,难以用确定性的数学模型准确计算,一般测量方法是加密井眼圆周上的采样点,即从4臂井径加密到6臂、8臂、12臂等,以尽可能多地采集到不规则井眼处的真实值,提升测量准确性。这也是哈利伯顿公司研制的LOG-IQ测井仪将井径仪的4臂增加到6臂的原因之一。
6 结 论
1)采用“四点定圆”方法实现了测井仪偏心时的井眼校正,对EILog 4臂井径测井仪的机械结构和电路结构进行了改进,解决了EILog井径仪在大斜度井、水平井规则井眼测量中的严重缩径问题,使得到的井径值误差满足测井要求。
2)经过室内实验验证,改进后的4臂独立的EILog井径测井仪处于不同偏心状态时,所测的井径值均能反映实际的井眼大小,误差更小,精度更高。
3)改进后的井径测井仪经上井试验验证,无论在大斜度井或水平井中,所测井径曲线与钻头直径误差均在5%以内。在个别井段,井径曲线误差较大时,其与其他测井曲线具有较好的对应关系,符合扩井等实际井况特征,具有实际应用和推广价值。
4)“四点定圆”的数学模型决定了本研究中的井径偏心校正方法只适用于规则的圆形井眼,对于井眼垮塌造成的不规则井眼或非圆形井眼不适用。
