A novel adaptive temporal-spatial information fusion model based on Dempster-Shafer evidence theory①
2023-12-15HUZhentao胡振涛SUYujieZHANGZihan
HU Zhentao(胡振涛), SU Yujie, ZHANG Zihan
(School of Artificial Intelligence, Henan University, Zhengzhou 450046, P.R.China)
Abstract
Key words: temporal-spatial information fusion, evidence theory, Deng entropy, evidence distance, credibility decay model
0 Introduction
Dempster-Shafer (DS) evidence theory[1-2], also known as the belief function theory, is essentially a generalization of Bayesian theory[3].Compared with Bayesian theory, DS evidence theory can effectively achieve the representation and processing of uncertain information without prior knowledge[4].In addition,DS evidence theory can represent the stochastic uncertainty information, the incomplete information, and the subjective uncertainty information better.Therefore,DS evidence theory can be applied to solve many problems, such as temporal-spatial information fusion.
The temporal-spatial information fusion technology is a combination of temporal and spatial, which can solve the problem of target recognition under complex conditions that is difficult to be satisfied by a single spatial or temporal information fusion technology.
During the development of temporal-spatial information fusion technology, many related temporal fusion methods have been proposed[5-7].But they all ignored the influence of temporal factors on the fusion results.Therefore, some scholars have determined the discount weight of historical moment fusion information from different perspectives.Song et al.[8]constructed a credibility decay model by analyzing the characteristics of temporal information fusion, which is an effective mean to achieve the temporal information fusion.But it fails to pay attention to the impact of spatial high-conflict information on the temporal-spatial fusion results, which will lead to the deterioration of the anti-interference ability of the model.Although some methods[9-10]existing can compensate for the shortcomings of the credibility decay model to some extent, they still have a lot of room for improvement.In addition, Li et al.[11]constructed an optimization model for solving temporal weights by quantifying the decision maker’s preference for the temporal order.But this method needs to be performed after certain moments accumulation, which does not reflect the real-time characteristic of temporal information fusion.Refs[12,13] performed the assignment of temporal weights by the ordered weighted aggregation (OWA) operator and the visibility graph averaging(VGA).However, the method only focuses on the order of time nodes and ignores the impact that historical information brings to the current moment.
To solve the above problems, this paper proposes an adaptive temporal-spatial information fusion method based on the DS evidence theory, which mainly includes two steps.Firstly, the spatial fusion method based on Deng entropy and evidence distance is established.By considering the correlation between evidences and the information volume of the credible evidence, the conflicting information among the spatial evidences can be effectively processed and a reasonable spatial fusion result can be produced.Secondly, based on the credibility decay model and Shafer’s discount criterion,the historical cumulative fusion information is discounted, which is combined with the spatial fusion result at the current moment by Dempster’s combination rule.This method can obtain atemporal-spatial fusion result with high accuracy because it follows the sequential nature of the temporal information fusion.
The other sections of this paper are organized as follows.Section 1 introduces some basic concepts.Section 2 proposes an adaptive temporal-spatial information fusion model based on the DS evidence theory.Section 3 discusses the rationality and superiority of the proposed method through a simulation.Section 4 summarizes this paper.
1 Preliminary
1.1 DS evidence theory
If there is a setΘ={θ1,θ2,θ3,…,θu}that consists ofumutually exclusive elements, thenΘis called the frame of discernment (FOD).The power set ofΘconstitutes a set containing 2Θelements, denoted as 2Θ={θ1,θ2,…,θu,θ1∪θ2,…,Θ,ϕ}.
ForA∈ 2Θ, if the mappingm: 2Θ→[0,1]satisfies the following conditions.
where,mis called a basic probability assignment(BPA).m(A)is the belief value assigned to the propositionA.Whenm(A)> 0 ,Ais the focal element ofm.The vector form ofmis denoted asm.
Assuming that two different BPAsm1andm2;A1,A2,…,AkandB1,B2,…,Blrepresent the focal elements ofm1andm2, respectively.The combined BPA is denoted bym.Then, Dempster’s combination rule is denoted as
where,…,k;q= 1,2,…,l) is the conflict coefficient representing the degree of conflict between evidences.The larger the value ofK, the greater the degree of conflict between evidences.
Assuming thatm(A)is a BPA defined onΘ, the Pignistic probability transformationBetPm:2Θ→ [0,1]is denoted as
where,Ais the cardinality of the setA.
1.2 Evidence distance
Peng et al.[14]proposed a method to measure the distance between BPA functions.Letm1andm2be vector forms of BPAsm1andm2in the same frame of discernment.Then the distance betweenm1andm2can be defined as
The greater the distance between evidences, the greater the difference between evidences.
1.3 Uncertainty measure
To measure the uncertainty of BPA, some scholars introduced the Shannon entropy.Based on the Shannon entropy, Ref.[15] proposed the Deng entropy, defined as
1.4 Credibility decay model
For the sequential character of the temporal information fusion, Ref.[8] created a credibility decay model by combining the Markovian property with the evidence discount theory.Let{(t1,m1),(t2,m2),…,(tn,mn)} be the BPAs ofnevidences obtained from time nodest1,…,ti,…,tnandgbe the Dempster’s combination rule.The dynamic combination resultfn(m1,m2,…,mn)ofnevidences using the credibility decay model can be denoted as
where,tnandmnare the time point at which evidence is collected and the BPA at that moment, respectively.The dynamic credibilityαattiof the BPAmjobtained attjis defined as
2 The proposed adaptive temporal-spatial information fusion model
With the increasing complexity of the target recognition scenarios, the recognition information obtained by a single sensor at a single moment is often not accurate.To ensure the target recognition accuracy, the temporal-spatial fusion of the recognition information is often required.Therefore, a new adaptive temporalspatial information fusion model is proposed.The specific process is shown in Fig.1.
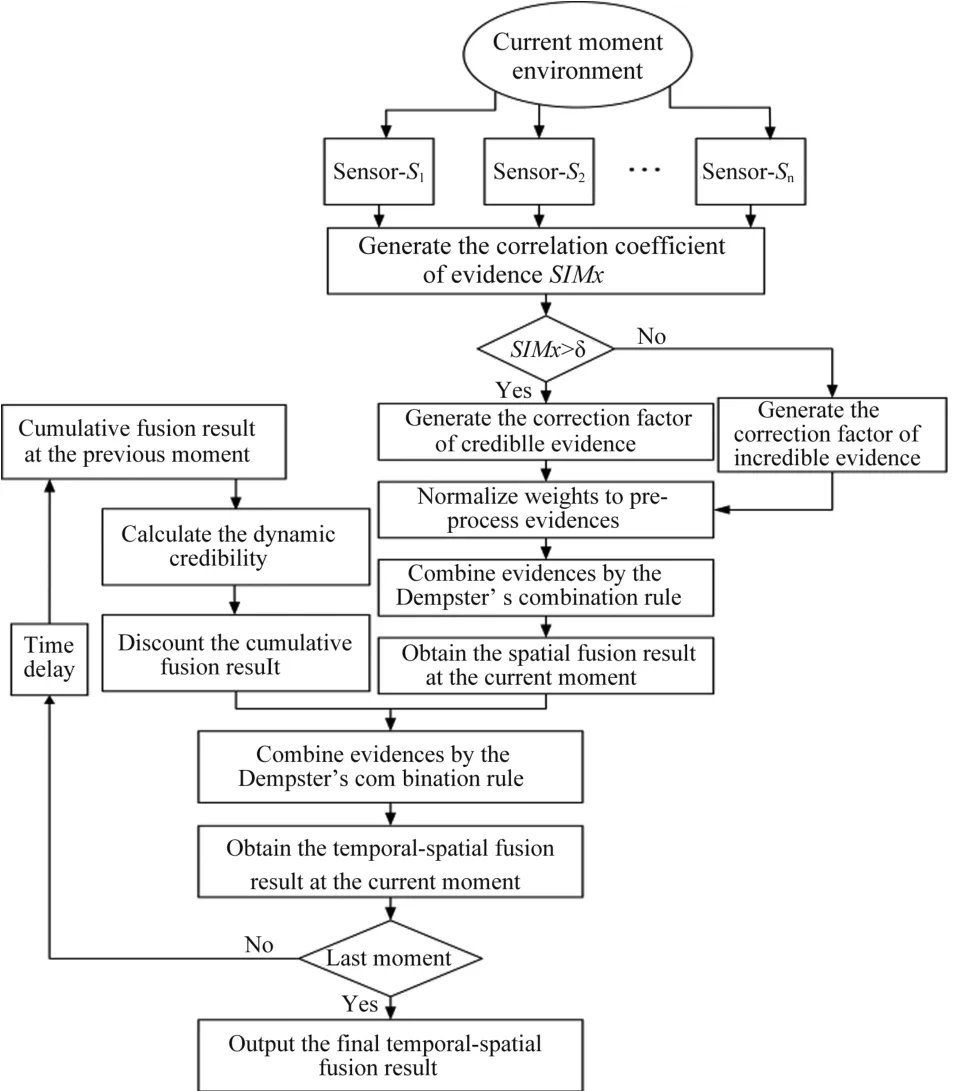
Fig.1 Temporal-spatial fusion method based on adaptive processing strategy
2.1 Support coefficient of the spatial evidence
Step 1 For the updated information sequenceacquired bynsensors atti, they are viewed asnspatial evidences.The degree of correlation between the spatial evidences is obtained by
whererepresents the similarity betweenmxiandmyi.
Step 2 The similarity matrix is represented as
Step 3 The support coefficientSupxof the spatial evidence is expressed as
Step 4 The correlation coefficientSIMxof the spatial evidence is defined as
Step 5 Set the thresholdδ.And distinguish the credible evidence from the incredible evidence based on the support coefficientSupxof the evidence and the thresholdδ.
IfSupx>δ, the evidencemxiis credible.Otherwise, it is incredible.
2.2 Correction factor of the spatial evidence
Step 1 For the credible evidence, the information volume is introduced to obtain its correction factor:
Step 2 For the incredible evidence, its evidential correlation coefficientSIMxis regarded as the correction factor.The normalized correction factor is denoted as
Step 3 Weight the spatial evidences according to the normalized correction factorwxand generate the pre-processed BPA functionmi’ :
Step 4 The pre-processed evidencemi’ is fused(n-1) times by Dempster’s combination rule to obtain the multi-sensor spatial fusion resultmiatti.
2.3 Temporal-spatial evidences fusion
Assume ⊕m1,⊕m2,…,⊕mi-1are the cumulative fusion information at the historical momentst1,t2,…,ti-1, respectively.
Step 1 On entering the next momentti, the credibility factorαof the cumulative fusion result⊕mi-1attican be calculated by Eq.(8).
Step 2 The cumulative fusion result ⊕mi-1is discounted by Shafer’s discounting criterion
Step 3 Combine the discounted result ⊕and the temporal update evidencemiattiby the Dempster’s combination rule.The final result is the cumulative fusion evidence ⊕miatti.
3 Simulation results and analysis
The example presented in Ref.[16] is applied to verify the feasibility and effectiveness of the proposed adaptive temporal-spatial information fusion method in this paper.In this simulation,λis taken as 0.05 andφis taken as 0.143.
In this simulation, there are six heterogeneous sensorsS1,S2,S3,S4,S5andS6, which are assigned to collect the target recognition information at each time point.The collected target recognition information is independent of each other and is transformed into the BPAs.There is a frame of discernment constructed from the targetsθ1(Bullet),θ2(Balloon) andθ3(Fragment), denoted asΘ= {θ1,θ2,θ3}.And the BPAs for target recognition formed by multiple sensors at different moments can be seen in Table 1.
3.1 Spatial evidences combination
From Table 1, the presence of the sensorS5leads to a large conflict among evidences att1.But the sensorsS1,S2,S3,S4,S6all give larger support to the target{θ3}att1.Therefore, the result of target recognition should be the target{θ3}.Obviously, fromt2tot5,there is a low conflict among spatial evidences.
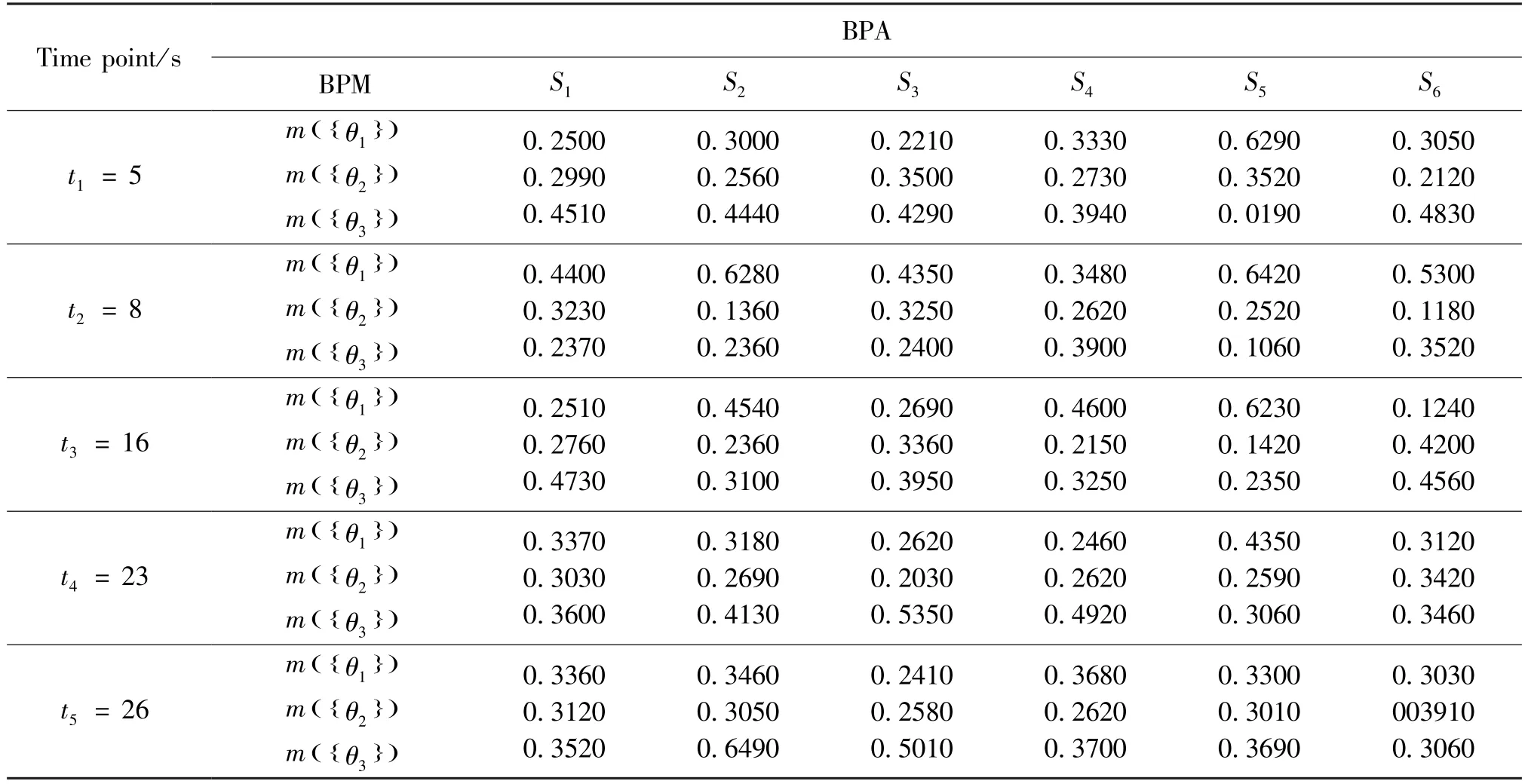
Table 1 BPA for target recognition formed by different sensors at each time node
The spatial fusion results of the BPAs in Table 1 obtained by the Dempster’s combination method, the method in Ref.[16], and the proposed method are shown in Table 2, Table 3, and Table 4, respectively.The spatial fusion results show that all three methods can obtain fusion results consistent with the intuitive analysis fromt2tot5.Because there is a low conflict among spatial evidences fromt2tot5.In comparison, it is found that the support for the target obtained by the proposed method is higher.However,if there is a large conflict, such as the sensorS5att1, the Dempster’s method generates the wrong recognition result{θ1}.The method in Ref.[16] and the proposed method both give high support for the target{θ3}, which demonstrates the ability of the proposed method to handle the conflict existing in spatial information.
3.2 Temporal-spatial evidences combination
According to the spatial fusion results,BPA at every moment exceptt2has greater support for the target{θ3}.Therefore, the final identification result should be the target{θ3}.For comparison and analysis, thetemporal-spatial cumulative fusion results obtained by different methods at each moment are given in Table 5.From Table 5, it can be seen that, due to the system perturbation att2, the cumulative fusion results obtained by different methods give higher support for the incorrect target{θ1}than the correct target{θ3}.And starting fromt3, the recognition system recovers from the perturbation and the support for the target{θ3}by each method is improved.In contrast, the proposed method can recover from the disturbance state too quickly and generate the highest recognition accuracy att5, because it takes into account the adaptive correction of spatial evidences as well as the credibility decay of historical evidences.
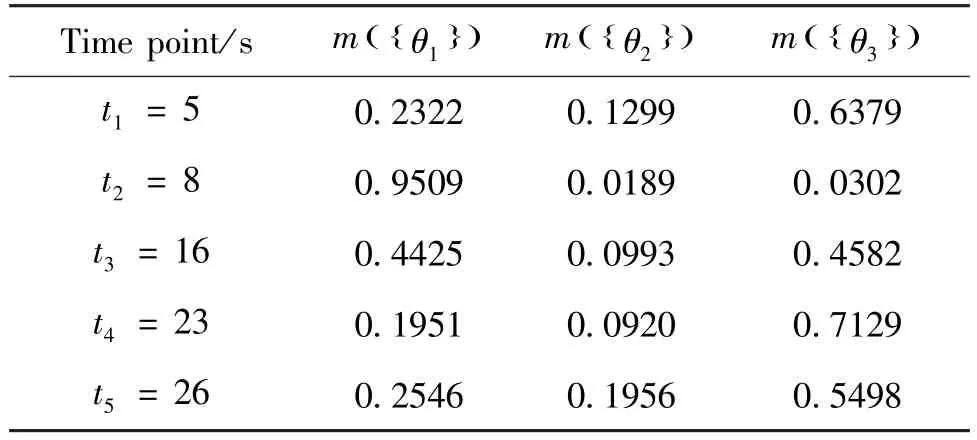
Table 3 Spatial fusion results obtained by the method in Ref.[16]
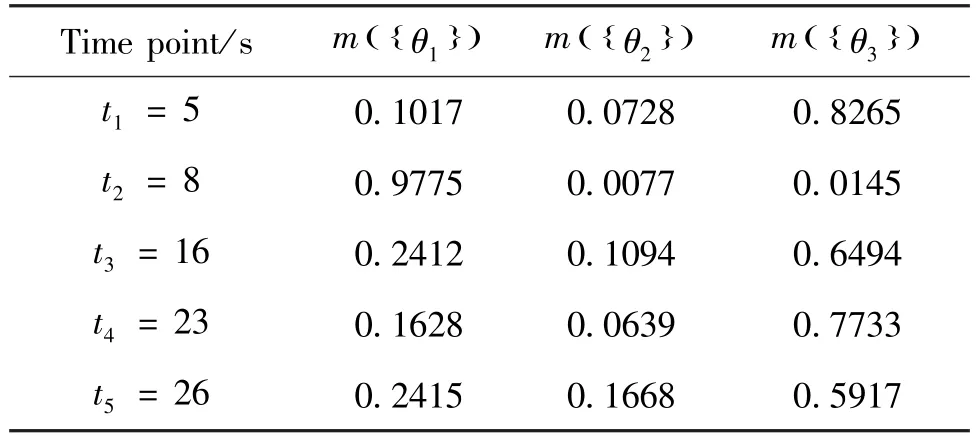
Table 4 Spatial fusion results obtained by the proposed method
The trends of the Pignistic probabilities over time obtained by Dempster’ s method, the method in Ref.[8], the method in Ref.[16], the method in Ref.[12],and the proposed method are shown in Fig.2 to Fig.6, respectively.In Fig.6, there is the
BetPm(θ3)>BetPm(θ1)>BetPm(θ2), except att2when there is a strong perturbation.And the support of the proposed method for the target{θ3}is significantly greater than the target{θ1}att3.This indicates that the proposed method can converge faster and focus on the correct target faster when the sensors recover from the perturbation.
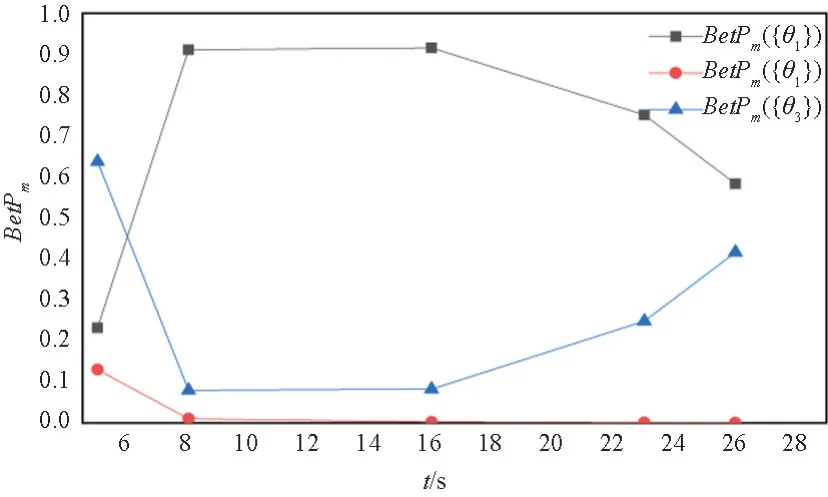
Fig.2 Temporal-spatial fusion results obtained by Dempster’smethod at each moment
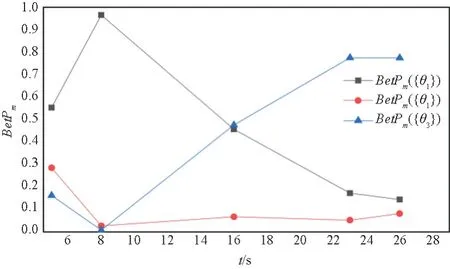
Fig.3 Temporal-spatial fusion results obtained by the method in Ref.[8] at each moment
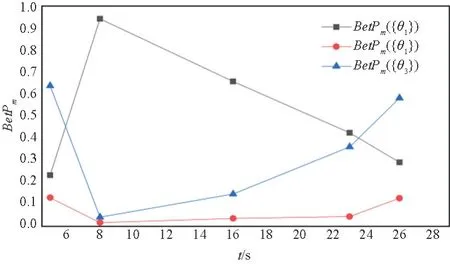
Fig.4 Temporal-spatial fusion results obtained by the method in Ref.[16] at each moment

Fig.5 Temporal-spatial fusion results obtained by the method in Ref.[12] at each moment
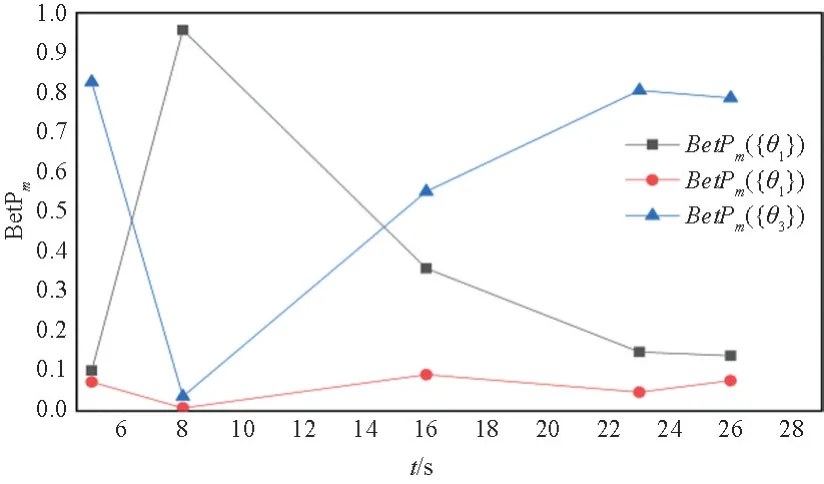
Fig.6 Temporal-spatial fusion results obtained by the proposed method at each moment
4 Conclusions
In order to realize the target recognition based on the temporal-spatial information fusion, an adaptive temporal-spatial information fusion method is proposed in this paper.Firstly, the evidence distance and the Deng entropy are introduced to measure and correct spatial evidence,thus generating the updated evidence at the current moment.Secondly, combined with the credibility decay model, the historical cumulative fusion evidence from the previous moment is discounted in the temporal system.Finally, the temporal-spatial information fusion is achieved by combining discounted historical evidence with updated evidence.The simulation results show that the proposed adaptive temporalspatial information fusion method is based on the characteristics of information inheritance and can update in temporal information fusion.In addition,the method has strong anti-interference ability.

Table 5 Temporal-spatial fusion results of different methods
杂志排行

High Technology Letters的其它文章
- Design and implementation of control system for superconducting RSFQ circuit①
- A dynamic fusion path planning algorithm for mobile robots incorporating improved IB-RRT∗and deep reinforcement learning①
- Deep learning-based automated grading of visual impairment in cataract patients using fundus images①
- Research on dual-command operation path optimization based on Flying-V warehouse layout①
- Two stream skeleton behavior recognition algorithm based on Motif-GCN①
- A fault recognition method based on clustering linear regression①