基于Arduino 的物流多旋翼无人机设计
2023-12-13苏吉阳
苏吉阳
(厦门技师学院,福建 厦门 361101)
0 引言
随着电子商务发展的迅速增长,快递产品的“最后一公里”配送变得越来越关键,和人工配送比较,无人机配送具有体积小、花费低、见效快、作业简单的优势,能够明显降低物流配送压力[1];同时,在新冠疫情的影响下,避免无谓的人群接触已变成常态,也进一步推动了无人机物流运输的发展。
近些年来,随着无人机的快速发展,其在多个行业中都具有了相当广阔的应用。国内关于无人机在物流运营方面的运用也进行了深入探讨,但对于传统无人机在物流领域中的应用目前还是存在着一些的限制条件与困难。就目前使用的传统无人机而言,其自身设计也存在缺陷,例如传统的小型无人机航程较小、负载量比较小,而在货运端使用时无法适应各类运输商品的不同定制需求等[2]。虽然国内一直在积极进行探讨,不过目前大部分无人机技术还处于集中在空旷地区进行研究型试验的状态,因此,无人机在具体使用中的操作和空间管控问题亟待解决。
本文通过对现行小型无人机的运输过程的缺陷,对物流无人机进行完善。在运行配送环节中,存在无人机物流配送需要人工辅助装卸,续航能力较弱等问题,故采用夹爪式拾取设计、太阳能辅助供电等各种结构优化,在飞控以及Arduino 的控制下,实现无人机在物流过程中更加高效地工作。
1 总体设计
1.1 无人机草图
根据研究所设定性能要求,针对无人机配送的劣势,提出以下改进方案:无人机续航能力弱,导致不能长时间执行配送,为了提高无人机续航能力,通过大幅度减轻无人机起飞重量,采用非主要受力部分镂空设计,采用碳纤维材料、PLA打印材料打造机身,在外壳上装有太阳能板,在有阳光天气下,可为锂电池辅助充电。无人机配送需要更大的载重要求,采用大型号螺旋桨和大功率无刷电机提供升力,使得无人机载重能力上升。无人机在爬升时,会受到空气阻力等外部因素影响,采用起落架收放式设计,有效减少空气阻力,减少对于电能的消耗。为减少无人机配送时的人工辅助装卸,采用夹爪式拾取设计,可以实现定点投放,使物流配送更加智能化、自动化。
综上所述,本文将对配送无人机的续航能力、载重能力以及物品装卸进行总体设计,方案草图如图1 所示。

图1 物流无人机草图
1.2 基本飞行任务剖面
飞机工作剖面,是为了实现某一特殊飞行目标而所描绘的飞机工作轨迹图,是设计无人机的基本参数依据,也就是在快件配送时,无人机所必须进行的基本工作过程,图2 所示为基本工作剖面图,当无人机使用夹爪夹起快件时,在垂直飞行时通过无刷电机驱动螺旋桨的运转,从而实现了爬升,在爬升同时,收取起落架;当到达指定位置时,在垂直下落阶段,无刷电机速度减小,使无人机缓慢降落,即将达到地面时,起落架下放,再将物品放置指定位置。

图2 执行任务剖面图
1.3 总体布局
由1.1 ~1.2 节提出的设计方案对无人机整体进行布局,悬臂及起落架均为对称分布,并在机身下部加上夹爪,物流无人机整装图如图3 所示。为了解决四旋翼无人机的陀螺效应,采用正反转电机以及正反桨叶的设计[3-4],通过分电板控制每个旋翼电机的功率,从而改变无刷电机的转速从而控制升力,使物流无人机在执行飞行任务时,具有较好的稳定性。

图3 物流无人机整装
1.4 机体参数确定
机身轴距为两个电机轴之间的距离,整体直径距离为电机轴加上螺旋桨的长度,整体高度为起落架至外壳顶部的距离确定,可承受重量范围由升力及重力加夹爪确定,具体参数如表1 所示。

表1 机体参数
1.5 机体设计
为了减少执行飞行任务时受到空气阻力等影响,采用收放式起落架设计,主要由起落架、舵机、四连杆机构等结构组成。当起飞时,通过手机端发送指令至Arduino开发板中,使得舵机正转,四连杆机构也随之转动,让起落架抬升,从而减少空气阻力;当下落时,使舵机反转,连杆带动起落架下放,减少下落时对无人机的缓冲,起落架的抬升角度可达60°,在运行时,不出现卡壳现象,收放自如,图4 所示为起落架收放设计图。

图4 起落架收放设计
针对无人机续航能力不足,在无人机的上外壳安装一块180 mm的太阳能板,为无人机进行辅助供电[5],在飞行过程中,太阳能板捕获阳光,将太阳能转换为电能,存储在电池里[6],图5 所示为太阳能板。

图5 太阳能板
无人机的机身主要由上外壳、中部盘、下外壳组成,机身质量均匀分布,保持重心位于机身重心位置,维持飞行平稳[7]。上外壳上装有太阳能板和GPS,将GPS 装至外部,使无人机接收信号更为灵敏;中部盘上装有分电板、接收器以及电调,并在其非受力部分进行镂空式设计,减少机身的质量;下外壳为主要承重部位,装有电池以及飞控,充分利用机身的内部空间,并将外壳进行防水处理。
在无人机外壳底部装有小型蜗轮蜗杆夹持器和摄像头,通过摄像头进行观测,飞行至指定位置,通过手机端发送指令至Arduino开发板,夹取物品以及放置物品。夹持器内部采用蜗轮蜗杆机构,不仅能获得较大的传动比,具有自锁性,夹抓的开闭是通过齿轮传动控制,设夹抓的最大开角为40°,可夹取0 ~5 kg的物品,为了减少对物品表面的损伤,提高摩擦因素,物品与夹爪之间设计由面接触[8],图6所示为夹爪式收取。物流无人机机身及各个部位由上述结构组成,无刷电机和螺旋桨为无人机提供拉力,Arduino开发板、飞控为控制中心,GPS 为定位系统,大容量锂电池和太阳能辅助供电为能源系统,夹爪式收取设计与起落架收放设计,一定程度上增强续航能力以及智能化,图7所示为无人机起飞与降落姿态。

图7 无人机的起飞与降落
1.6 生产制造材质选择
中部盘为圆盘,使用质量轻,强度高碳纤维材料,对镂空式部位用激光切割机进行切割,外壳部分以及部分非标零部件用3D 打印材料PLA 制成,其余标准件均直接采购进行组装。夹爪中的部分零件用3D 打印件,而一些主要受力部分用复合材料制作,使得无人机起飞时,承重降低。
2 控制系统设计
2.1 控制系统
物流无人机的控制系统主要由飞控和Arduino开发板组成,飞控是用于在起飞、巡航、降落等阶段辅助或全自主对飞行器的其他系统及元器件起到协同控制的元件[9]。
2.2 工作流程
该无人机的两个机构由Arduino 开发板控制,当垂直起飞时,通过手机端输送抬升指令,Arduino开发板接收到指令后[10],使舵机进行正转,带动四连杆机构使得起落架抬升;当垂直下落时,重复上述指令,舵机进行反转,带动四连杆机构使起落架下放。当夹取物品时,输入指令,通过蜗轮蜗杆传动使夹爪闭合;当放置物品时,夹爪张开,控制系统原理如图8 所示。

图8 控制系统原理
飞控主要控制无人机的起飞、悬停、下落等指令,并可以通过飞控调节起飞的速度以及在飞行过程中的转向,特别在物流无人机下降时,确定好指定位置时,对物品的夹取需要更高的精确度,通过飞控对指定位置做适度的判断,再进行缓慢降落。
3 配件选择及静力分析
3.1 无刷电机
对于无刷电机来说,当电刷闭合时电机开始转动;当电刷断开时停止转动[11]。专业级无人机起飞需要至少4 ~6 个无刷电机驱动,通过飞控控制无人机的速度和方向[12]。多旋翼的电机最大拉力总和不能低于无人机总重的1.5 倍。无刷电机提供升力时,应对其进行正反桨确定,保证其提供升力。
物流无人机可夹持0 ~2 500 g的重物,且自身质量为2 600 g,按最大夹持重量计算,该无人机总质量为5 100 g,通过计算得出至少需要能够承载7 650 g 以上的拉力,由于是四旋翼无人机,所以单个无刷电机的负载能力为1 912.5 g以上,才能满足飞行要求。
按照上述计算,选用型号为TYI-5008 KV400 的5008无刷电机,每个无刷电机可提供的负载能力为1 920 g,螺旋桨选用1655 碳纤桨,60%油门消耗为208.8 W,且每个电机的质量为156 g,由实验测算得出结果,符合选型条件,无刷电机具体参数如表2 所示。

表2 无刷电机参数
3.2 太阳能板
在上外壳顶部装有一块大小为180 mm 的太阳能板[13],在有阳光天气下执行飞行任务时,能有效地接收到阳光,并将其转化成太阳能,该无人机采用多晶硅太阳能滴胶板,为电池辅助供电,转化效率较好,在一定程度上增强续航能力。
3.3 电池
3.3.1 电池型号
采用大容量锂电池作为无人机能源系统,该电池有两个USB接口,一端为摄像头和Arduino 开发板进行供电,另一端为无刷电机和夹持器等元器件进行供电,并且通过太阳能板为电池辅助充电,电池释放电能通过分电板将电流分布给4 个无刷电机,无刷电机的转动通过电调控制,使其接收电流及电压相等,运行平稳,电池参数如表3 所示。
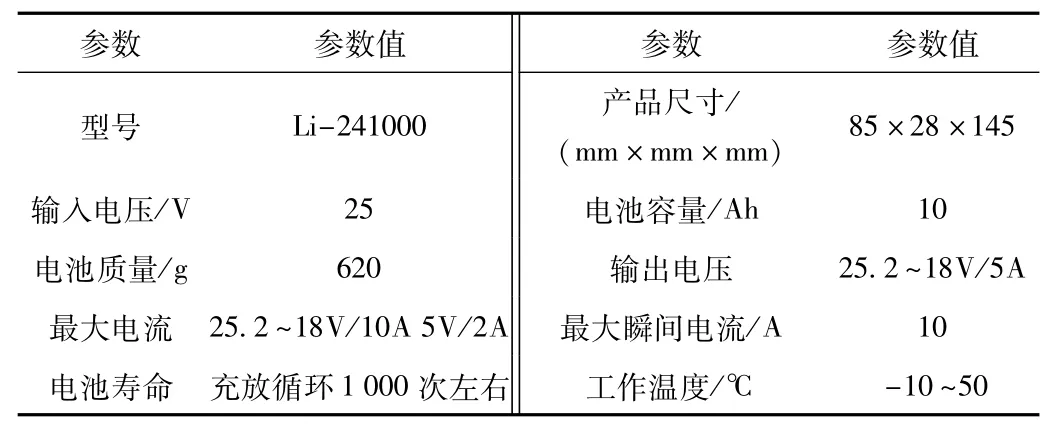
表3 电池参数
3.3.2 电池续航能力计算
由于每个无刷电机在进行爬升过程中,会有60%油门消耗,且最大电流为8.7 A,所以平均每个无刷电机消耗8.7Α×60% =5.22 Α,则4 个无刷电机消耗5.22 Α×4 =20.88 Α。
当物流无人机在爬升过程中,遭遇大风以及外部因素的干扰,其油门消耗将会进一步增加,需要有更多电流去调整其平稳性,假设油门消耗增加至70%,则每个无刷电机消耗电流为8.7 Α ×0.7 =6.09 Α,则4 个无刷电机消耗电流为6.09 Α×4 =24.36 Α。
大容量锂电池的总容量为10 A·h,释放的电流为10 A·h ×60 min =600 (Α·h)/h,600 (A·h)/h ÷24.36 A =24.6 min,当有太阳能板进行辅助供电时,在有阳光的天气下,续航时间可达27 min。
4 SolidWorks Simulation仿真分析
中间盘为无人机控制系统和能源系统的主要承重部位,通过SolidWorks Simulation 对中间盘进行静力学分析,来验证设计方案的可行性。材料选用碳纤维材料,通过夹具将中间盘夹紧,在上方施加500 N 的重力,通过运动算例得出分析结果[14]。
由图9 可以看出中间盘发生最大变形出现在镂空部位的边缘处,但是镂空部位不承重,最大应力为2.680×104Pa,而其余部位受到载荷均良好,明显远低于对应材料碳纤维的许用应力值,符合承重要求[15]。由图10可以看出中间盘发生最大变形出现在外端边缘处,最大形变量为1.177×10-4mm,但位移距离变化不大,而中间主要承重部位不发生位移变化,符合其要求。

图9 中间盘应力变化分布

图10 中间盘位移变化分布
由图11可以看出中间盘应变发生最大变形出现在镂空部位,最大形变量为8.821×10-6mm,其余部位受到的应力较小,其最大形变量处于材料的运行的范围内,符合设计要求。
5 结束语
本文设计了一款既能延长续航能力,又能实现智能化配送的无人机,通过对起落架收放设计,夹爪式拾取设计,配合太阳能辅助供电,使得物流无人机在多次执行配送任务时,克服了物流无人机的缺陷,使得物流无人机在现存问题上得到进一步改善。该无人机可以有效运用系统特点及其在高空行驶的优点,在配送快递行业的运用将变得更为普遍。
