改进的粒子群模糊PID 算法在温控系统中的应用
2023-12-13谢竹逵
谢竹逵,冯 可
(江西理工大学电气工程与自动化学院,江西 赣州 341000)
0 引言
细胞培养技术在动物育种、医学研究、微生物研究、制药研究等领域有着重要作用,通过在细胞培养箱内模拟一个类似于生物体细胞生存的环境,进行体外培养。细胞培养箱内适宜的湿度、温度、气体浓度、培养液PH值对于细胞的生存至关重要,其中细胞培养箱温度控制效果的优劣更是直接影响细胞的存活率,所以怎样更好地温控是培养箱在研制过程中需要解决的技术核心。
文献[1]采用前馈PID 控制器实现了对水温控制精度上提高;文献[2]采用模糊PID 算法对培养箱进行温控,克服了温控数学模型不易被建立的缺点;文献[3]采用积分分离PID算法对电锅炉进行温控,克服积分作用过度导致的温控系统振荡的缺点;文献[4]基于粒子群模糊PID算法对蒸汽进行温控,克服了模糊控制过度依赖专家经验的缺点。
但上述方法还有一定缺陷,不能同时解决温控积分作用过度、模糊控制过度依赖专家经验的缺点。为此本文结合模糊PID控制算法、改进粒子群算法的优点,提出改进粒子群模糊PID控制算法[5-6],并利用MATLAB/Simulink仿真证明了该算法在培养箱温度控制过程中的优势。
1 细胞培养箱温控数学模型的建立
1.1 热量传递方式
培养箱体积为(440 ×320 ×137)mm3,采用电加热板进行气套式加热。因为细胞培养箱属于有限空间自然对流换热,所以培养箱中热量的传递方式遵循式(1):
值得指出:若Gr ≤2 860,则可认为培养箱的内部热量为热传导。并且从文献[7]中可以得到空气的一些物理性质:g =9.8 N/kg,v =20.02 ×10-6m2/s,细胞培养箱体积V =0.019 2 mm3,两侧温差Δt =10 ℃以内,其中a =1/T =1/364 K =2.915 ×10-3K-1。
将上述数据代入公式可得:
根据上面的结论可以得出,本文的细胞培养箱的热量传递是纯导热传递。
1.2 培养箱热力学建模
在本文中,假设箱体内空气吸收的热量θ1约等于电加热板释放出去的热量θ2,如果电加热板侧壁的温度为θ3,培养箱内部中间温度为θ4,则静态方程[8]为:
动态方程则为:
据此可以推出热量的瞬时公式:
假设培养箱内某一点的温度热量,可以假设为无穷大平板与空间一点的自由传热。所以新的动态方程为:
式中:A为培养箱的截面面积;θ3为电加热板侧壁的温度;θ4为培养箱内中间温度;(θ3- θ4)为细胞培养箱侧壁与中间的温差;λ为导热系数;C为空气比热容;V为培养箱的体积;b为气体厚度;ρ为培养箱内部空气气体密度。
将式(6)进行拉普拉斯变换:
在实际的温控中,温度测量值会存在一个时间延迟τ,所以式(7)写成:
式中:K =1,T =CVρb/2λA。
本文中的ρ =10.29 kg/m3;其中细胞培养箱的体积V =0.019 2 mm3;比热容C =1.004 kg·K;导热系数λ =0.169 6 W/(m·K);b =1.37 mm;培养箱箱体表面积A =0.428 7 mm2;时间延迟τ =6 s。将上述已知参数代入到式(8)中可得出,细胞培养箱温控系统[9-10]的传递函数近似为:
2 粒子群优化模糊PID控制算法
2.1 模糊PID控制
模糊PID 是以传统PID 控制为基础,结合模糊控制器的各自优点,组成的一种复合控制器。这种复合控制是通过积累大量设计者的实际经验,形成系统输入误差量与常规PID的3 个参数的一般规律,建立一套符合该控制系统的模糊规则库,在此规则库的基础上,将输入量模糊化、与模糊规则的匹配推理、解模糊3 个步骤传给PID控制器[11-13],根据输入量的变化,对系统进行自适应最优控制。
2.2 模糊控制的优化
一般优化模糊控制器分别有以下3 类方法:优化隶属度函数、优化模糊化的量化因子和解模糊化的比例因子、以及优化控制器的模糊规则,本文将选择优化解模糊化这一步骤中的比例因子。
2.3 粒子群优化模糊PID控制算法设计思想
算法的设计思想:根据误差值e 的变化,采用改进的粒子群算法在搜索范围内搜索出模糊控制器的最适宜比例因子,解决固定设置的比列因子参数过度依赖人为经验的问题。粒子群优化模糊PID原理如图1 所示。

图1 粒+子群优化模糊PID原理
2.4 算法设计
2.4.1 标准粒子群算法
粒子群算法(POS)是科学家在20 世纪末提出的寻优算法。算法的主要思想:在鸟类捕食过程中,将粒子移动看成鸟类捕食。粒子移动具有两个属性:位置和速度,粒子是在一个d维空间中根据粒子位置与速度的改变找出食物的所在地(即最优解)。在粒子迭代的过程会出现Pbest与gbest两个指标,前者称为粒子自身极值、后者称为粒子种群最优解。粒子每一次的迭代都必须重新更新Pbest与gbest,直到满足迭代条件,输入全局最优解。
速度与位置更新公式如下:
c1与c2是加速系数,若c1=0 粒子将失去认知能力,容易陷入局部极值点;若c2=0 粒子将失去信息共享,粒子群算法将变为随机搜索;所以c1、c2一般在0~4之间选取,通常取c1=c2=4。
ω为惯性权重,若ω =0,粒子将提前到当前全局最好位置,此时更像一个局部算法;ω ≠0则粒子可以扩展空间进行搜索此时更像一个全局算法。
2.4.2 惯性权重的优化
在大多数的粒子群算法中,都将惯性权重值都设置为线性递减。本文提出将惯性权重值改用非线性变化,惯性因子值设为:
式中:ωi为第i次算法迭代的最新惯性因子值;ωmax为整个算法迭代过程中的最大惯性因子值;ωmin为整个算法迭代过程中的最小惯性因子值;imax为迭代次数上限。
从式(11)中可以看出,惯性因子值按照余弦规律递减,算法前期,ω 变化幅度变慢,此时大范围全局搜索,算法中期,ω变化幅度变快,此时提高算法的收敛速度,算法后期,ω算法变化幅度再次变慢,此时更为准确的局部搜索。
2.4.3 学习因子的优化
学习因子对粒子群寻优算法的作用至关重要,其表示的意义是粒子自我和粒子种群的认知程度。所以在算法的整个迭代过程的前期,要以粒子自我经验为重,迭代后期,以整个粒子种群经验为重。
所以本文将学习因子设置为:
式(12)~(13)中:c1max、c1min、c2max、c2min为整个算法迭代过程中的学习因子c1、c2的最大值与最小值;imax为寻优算法的迭代次数上限。
从式(12)~(13)可以看出,算法前期,设定c1较大c2较小,算法后期,减小c1增大c2。
2.5 粒子群算法具体寻优过程
针对模糊PID控制算法控制细胞培养箱温控过程中存在的缺点,本文采用粒子群算法对比例因子Ckp、Cki、Ckd这3 个参数进行动态优化。具体寻优过程如下。
(1)初始化种群数,因为搜索的比例因子参数有3个,所以算法寻优维数n =3,速度vmax=0.05,vmin=-0.05,迭代次数为20 次。
(2)计算粒子适应度值。将粒子状态代入到仿真模型中,计算出粒子的个体适应度值与种群适应度值,与Pbest、gbest进行对比更新。本文采用ITAE 积分准则来评判控制系统性能。
其中t为时间,e(t)为温度误差值。
(3)更新粒子位置以及速度。分别将初始设定好的c1、c2、ω代入到速度更新公式进行粒子速度的更新以及粒子位置更新。
(4)判断终止。若达到最大迭次数或者得出粒子最佳适应度值时,停止程序运行,若没有达到上述要求,将程序转到步骤(2)继续进行寻优。
3 系统仿真与分析
3.1 模糊PID控制器
本文根据系统的输入量个数(误差值e 和误差变化率ec)与输出量个数(传统PID的3 个增量修正值Kp、Ki、Kd)将模糊控制器的结构设置为二输入三输出[14]。其中e、ec、Kp、Ki、Kd在模糊PID 控制中的论域设置为{-3-2-10 123 }。将输出和输入的模糊论域设为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大),根据本系统的温度控制特点,隶属度函数选为三角形隶属度函数。本文根据模糊控制理论以及大量的实验温度数据得出以下模糊规则制定要求。(1)若误差e较大的时候,Kp取得较大,Ki取得较小,相应的Kd取得适中偏小一点。(2)
当误差e和ec中等大小的时候,Kp取得尽量小一点。这里的Ki、Kd需取得适度的中间大小。(3)当误差e较大的时候,为了有比较好的鲁棒性,那么Kp要取较小,Ki取得要较大些防止出现振荡,所以此时Kd取得适中大小。
由此即可推出Kp、Ki、Kd的规则表,如表1 ~3所示。

表1 K p模糊规则
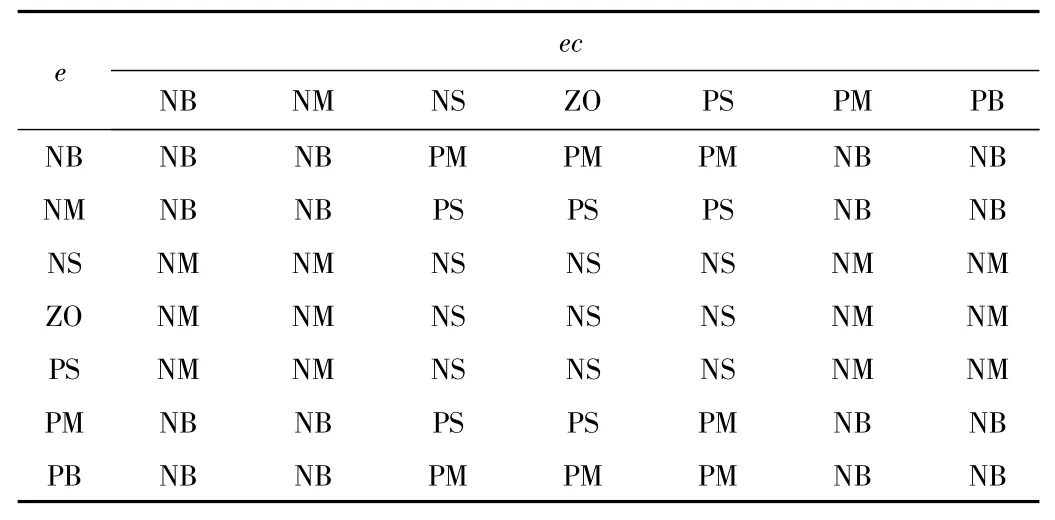
表2 K i模糊规则

表3 K d模糊规则
3.2 仿真分析

表4 最优比例因子数值

图2 比例因子优化曲线

图3 粒子群迭代曲线
为了验证最优比例因子的优越性,设置初始温度为0 ℃,目标温度为37.6 ℃采用MATLAB/Simulink 搭建仿真平台对细胞培养箱温控过程进行仿真,如图4 所示。

图4 改进POS模糊PID仿真模型
3.3 动态性能分析
从图5 的曲线图可以得到传统PID、模糊PID、改进的POS 模糊PID 三种控制方式在超调量、调节时间、振荡效果等方面的性能对比,如表5 所示。从表中的性能指标得出:模糊PID 对比传统PID,调节时间降低了14 s 左右,超调量降低3%左右,系统仍有轻度的震荡现象;改进POS 模糊PID 算法对比模糊PID,调节时间升高2 s左右,超调量降低8%左右,系统震荡现象基本消失,充分体现了改进POS 积模糊PID控制的优越性。

图5 仿真结果对比
4 结束语
本文通过对温控方法的研究,在标准POS模糊PID算法的基础上,将POS 寻优算法的惯性因子ω 进行非线性余弦递减改进,将学习因子c1、c2根据迭代次数进行正弦形式的变化,接着将改进的POS 算法去寻优模糊控制器中的解模糊这一步骤,找出控制系统中最优的比例因子,对细胞培养箱进行温度控制。并通过了MATLAB / Simulink的仿真对比,表明改进的POS 模糊PID对比PID、模糊PID,具有超调量低,调节时间少,抗干扰能力强等优点,充分满足了细胞培养箱的温度控制效果。
