基于仿生设计的四足类壁虎机器人*
2023-12-13帖轩正李秋宇
帖轩正,李秋宇,严 洁,杨 潇,周 鹏,骆 佼※
(1.上海工程技术大学艺术设计学院,上海 201600;2.上海工程技术大学机械与汽车工程学院,上海 201620)
0 引言
随着时代和技术的进步,四足机器人的实用价值逐渐凸显。与轮式、蠕动式等机器人相比,四足机器人具有机体结构稳定、运动灵活、受地形限制少等优点,在航空航天、预警侦察、补给运输等领域具有广泛的应用前景[1]。四足机器人因独特的结构设计和复杂的驱动控制方式,成为研究热点之一。但大多四足机器人仍需电控与复杂结构之间的配合才得以完成仿真的效果。仿生机器人就是模仿自然界中生物的精巧结构、运动原理和行为方式等的机器人系统。科学家们向生物学习,创造出了众多高性能的仿生机器人,如机器鱼、机器蛇、机器蝇,以及各种仿生材料[2]。仿真机器人在移动能力上具有灵活性和可变性的特点,故其可适应各种复杂地形及多种场景的探索工作,但是单纯的复杂大型机器人无法适应复杂场景下的各项探索工作。而部分仿生机器人具有体积小,质量轻的特点,在仿生机器人研巧热潮下,寻找到一种适用于辅助人类生活并适用于各类地形的机器人,并且能够担当起相应野外研巧和探究任务,成为了关注点。
足式机器人能够在复杂的地形上运行,其根本原因是仿生结构的灵活性、自由性,四足机器人的构造可按动物的骨骼构造设计[3]。 自然界作为人类寻求灵感的智库,一直以来为人类提供了大量的生物学启示,受到在生物世界中所观察到的足式动物运动优势的启发,科学家和工程师正在将生物智能的原理应用于足式机器人的设计[4]。国内外仿生机器人研究的两个主要方向是运动机理和行为方式[5]。国内对仿壁虎机器人技术的研究主要针对爬壁机器人展开,这方面影响比较大的主要有哈尔滨工业大学与北京航空航天大学,中国科学院沈阳自动化所机器人开放实验室[6]与上海大学也有这方面的研究,南京航空航天大学也已经展开了生物壁虎机器人技术研究并已取得初步成果[7]。但是目前,四足仿生机器人在狭窄空间等复杂地形的应用仍不多,且其机械设计复杂,缺少一些结构较为简单的仿生设计。因而,本文聚焦于一种结构简单,易操控,且能完成对壁虎爬行运动仿真的四足机器人;通过实验测试,证明该基于仿生设计的四足类壁虎机器人机械部分及驱动部分的设计是合理可行的。
1 四足类壁虎机器人结构
1.1 总体设计
1.1.1 仿生学及壁虎的生理结构
研究壁虎的生理结构及外形特点发现,从机械运动的角度看,骨骼组成了运动系统的构件,是支撑其运动的基础,骨骼间的关节是壁虎运动系统的运动副[8]。壁虎的脊椎骨骼及椎节间有相对转动较小的特征,构成其S 形的运动基础。四肢的构造对整体运动形态的影响较大,通过研究其运动特征发现,股骨相对身体的转动为-80°~80°,胫骨相对股骨的转动为60°~150°,如图1 所示。因而,本文以壁虎体积小且运动灵活为出发点,对壁虎爬行时四肢的运动及各关节处配合进行数据分析,开展四足类壁虎机器人仿生设计。

图1 壁虎的生理结构
1.1.2 整体结构及模块
根据壁虎的以上运动特征,将两块不规则亚克力板及舵机组合作为壁虎的躯体;以板块构成的双连杆结构作为壁虎的运动机构;以舵机、步进电机、传感器、摄像头作为其功能模块。机械结构规律性运动与舵机电机协调配合以实现各功能。近年来,无线网络因高速数据传输特性和连接稳定性的提高,在移动机器人领域也得到了应用[9-11]。
1.2 类壁虎机器人结构设计
1.2.1 机械结构
该机器人如图2 所示,包含活动连接的上躯体和下躯体,上躯体和下躯体的左右两侧均配置有双连杆腿组件,在上躯体和下躯体内均设有2 个分别用于驱动两侧双连杆腿组件的舵机,在每个双连杆腿组件的末端均设有吸盘以及用于驱动吸盘上下运动的步进电机;在上躯体或下躯体上安装有驱动器,所述驱动器与各个舵机和各个步进电机相连。

图2 类壁虎机器人结构
上躯体和下躯体均设有上垫板和下垫板,上垫板和下垫板之间通过若干铜柱和螺钉固定连接,舵机固定安装在上垫板和下垫板之间;上躯体的上下垫板后端以及下躯体的上下垫板前端均设有铰接座,通过销轴将上躯体、下躯体转动连接,销轴配置有扭簧。
各双连杆腿组件包含有腿板、第一连杆、第二连杆,在腿板安装有步进电机,步进电机连接有丝杆,在丝杆上安装有吸盘,由步进电机带动丝杆及其吸盘上下运动;第一连杆和第二连杆的一端均与腿板转动连接,第一连杆的另一端与舵机相连,第二连杆的另一端与上垫板或下垫板相连。舵机的输出轴向下穿过下垫板并与第二连杆相连;在腿板上竖直安装有垫柱,第二连杆的一端与垫柱顶端转动连接,垫柱的上下两端均设有推力球轴承。
上躯体前端活动连接有头组件,且在下躯体后端活动连接有尾巴组件,尾巴组件由至少3 节首尾链接连接的短杆组成。上躯体前端活动连接有头组件,且在下躯体后端活动连接有尾巴组件,尾巴组件由至少3 节首尾链接连接的短杆组成。上垫板或下垫板上设有用于限制头组件、尾巴组件以及下躯体摆动幅度的限位机构。
1.2.2 电控模块设计及分析
电控部分整体由舵机、步进电机、温度传感器、蜂鸣器、CNC 电机扩展版等组成,以实现在工厂巡逻防火,报警等实际功能。类壁虎机器人每个腿部的电控系统由1个舵机和1个步进电机组成。腿部双连杆机构通过舵机带动改变前后运动方向,步进电机控制脚掌上下运动,同时与摇杆结构配合使其协调运行,以便更快速地完成1个运动周期。
根据以上分析进行如下设计:舵机的转动角度通过占空比为5%的PWM(脉冲宽度调制)信号Timer 捕获,较寄存器为190;再使用CNC 电机扩展板配合A4988 驱动步进电机驱动壁虎机器人运动。A4988 驱动步进电机是一款带转换器和过流保护的DMOS 微步驱动器,该产品输出驱动性能可达(35±2)V,通过DIR脚控制方向。
2 四足类壁虎机器人运动学分析
2.1 运动学分析计算
2.1.1 步态分析
传统四足机器人大多采用刚性躯干,而自然界的四足动物普遍具有可自主运动的躯干,其在奔跑、跳跃、转弯、攀爬等一系列行为中都伴随着躯干的运动。动物的躯干运动形式主要包含扭动运动、拱仰运动和扭拱混合运动[12]。通过分析壁虎身体结构与运动规律[13]和观察壁虎爬行方式的基础上,设计出针对仿壁虎机器人的爬行步态。通过分析生物界壁虎的运动,设计出S 形的运动模型。图3 所示为四足类壁虎机器人一个周期的基本步态示意。
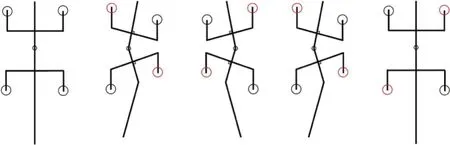
图3 基本步态示意
2.1.2 运动学计算
运动步态是足式机器人的走步形式,是足式机器人各条腿协调运动的一种规律,也就是每条腿的抬、放腿顺序,它是分析足式运动构件的重要参数[14]。对角线2只脚由步进电机驱动抬起24 mm;3个由垫柱和推力球轴承连接的碳板组成双摇杆结构,在舵机带动下两腿同时向前移动(通过计算得两条腿足以支撑整个身体)。身体前后两部分在产生角度(分析壁虎真实步态约为110°),因此设计中将腰部非固定连接,同时安装扭簧,以达到此目的。
经测量得: 腿部单次移动水平位移d=25 mm;腿部一次移动时间t=0.2 s;1 个抬腿(腿部上下移动)周期为T=5 s;预估前进速度V=d/(t+T/2)=0.93 cm/s。
2.2 静力学分析及输入端设计
为保证四足类壁虎机器人能在地面平稳爬行且实现其步态的仿真,需要在设计计算时,采取碳纤维板材质作为腿部主要材质,通过双连杆机构及电控部分的配合顺序,进行计算扭力、扭矩、转速等,针对其要求及计算结果对电控部分选型。整体控制及造型由舵机、步进电机和碳纤维板组成,舵机使用MG996R 舵机,扭矩为9 kg/cm(4.8 V)、11 kg/cm(6 V),力臂为61 mm,输出为14.459 N(4.8 V)、17.672 N(6 V),速度为0.19 s/60°(4.8 V)、0.18 s/60°(6 V),工作电压为4.8~6 V。步进电机采用K25步进电机,最大推力为20 N,最大行程为24 mm,一个运动周期为2.5 s。外壳和基本组织采用T300碳纤维板,拉伸模量为230 GPa,抗拉压强度为3 500 MPa。
3 仿真分析
3.1 计算机辅助分析
在进行四足类壁虎仿生机器人结构设计时利用了三维设计软件(SolidWorks),在研究新的机械结构时,可借助其进行概念化设计,基于机械设计原理和实际经验,通过这些软件建立三维虚拟模型并进行相应的仿真分析,可以使制造产品所用的费用大大降低,提高产品的性能,缩短开发时间[15]。图4 所示为辅助设计流程。

图4 辅助设计流程
3.2 建立简化的三维模型
首先利用SolidWorks 软件对四足类壁虎机器人的整体进行三维模型设计,在仿真分析之前确定需要得到的数据,包括步态运动仿真捕捉图、关节之间的角度、1个周期内的三维运动。受计算性能影响,在仿真分析时将对运动形态和控制影响不大的结构进行。简化后三维模型如图5 所示。通过分析计算测得在步进电机2.5 s 的运动周期以及舵机6 V 电压下,机器人的腿部单次水平位移为25 mm, 1 个抬腿(腿部上下移)的周期为5 s。整体以交叉步态为前进方式,前进速度约为0.93 cm/s。

图5 简化三维模型
4 结束语
本文设计的四足类壁虎机器人以较为简单的机械结构和电控系统模拟了自然界中壁虎的运动形态,达到了对壁虎的仿生目的。设计从壁虎步态分析入手,确立了基于连杆的机械结构形式,通过模块化设计思想和仿生学原理仿真计算。其中,由板块、连杆机构结合而成的机械骨架和电控部分协调一致,实现了对角步态和S 形运动仿真。本设计主要特点包括以下3点。
(1)腿部结构。以简单的连杆结构相互配合及其关节连接处的推力球轴承,实现对壁虎爬行步态的仿真,同时构成腿部的结构。该机器人以弯曲的碳板为骨骼,更形似壁虎又比直板更坚固。
(2)多种限位方式。腰部的扭簧、尾部的物理限位以及腿部的连杆结构,使其运动灵活,更贴近于壁虎真正的爬行状态。限位的多处使用保证了在运动过程中,机器人各部分不会对整体运动造成影响。
(3)功能方面。对壁虎的形态步态进行分析和规划,使其最大程度地实现仿生的特点。在眼睛位置开孔,安置摄像头,以实现监测功能。
本文设计成品体积小,拟态隐匿性好,可用于工厂和野外等,应用场合广泛;用材少,成本低,制造和使用成本低。
