基于PLC系统的平面移动式立体车库设计与实现
2023-12-13李芹芹张继红
李芹芹,陈 苏,张继红
(中南建筑设计院股份有限公司,武汉 430072)
0 引言
随着我国经济的发展,机动车保有量呈逐年增长趋势。然而,因传统停车场土地利用率低而城市土地资源又比较稀缺,导致出现城市道路的车辆违停增多、小区的消防通道频繁被占用等城市管理问题,立体车库作为一种新型的智能化设备便成了解决城市停车困难的最佳方式。立体车库是集自动化、机械、电气控制、监控界面和人工智能于一体的科学技术产物,分为升降横移类、垂直升降类、垂直循环类、平面移动类、巷道堆垛类、简易升降类等[1],其中平面移动式自动化程度高、空间利用率低、占地面积少,当某一层出现故障时不会影响其他层车辆的存取,提高了存车自由度,增加了停车密度,但在车库建设过程中,设备安装较为复杂,对安装工艺要求较高。目前平面移动式立体车库主要应用于占地紧张、人流密度大的场所,如医院、机关、商场等。
在进行立体车库设计时,车库选型是最为关键的一步,每类车库的优缺点不同,需要基于建设场地情况、总车位数、预算金额、后期维护、管理难度、存取速度、建设工期等因素合理选择车库类别。本文主要研究一种平面移动式立体车库,进行建筑平面优化设计、车库的硬件设计、控制电路设计及软件设计,并应用于武汉市武昌区的某大型立体车库。
1 项目概述及平面优化
本工程位于武汉市武昌区核心地段,周边为大型写字楼。为最大程度地复合利用土地,该建筑的主要功能有供水转压站、立体车库、办公及数据机房。供水转压站位于地下,如若把办公和数据机房放在低楼层,而将立体车库放在高楼层,可以减少人行电梯及步梯所占用的面积,但升降机提升高度、出入口数量都将有较大幅度的减少,严重影响停车效率。经综合考虑后,地下为供水转压站,1~12 层为立体车库,上部为办公和数据机房层,建筑总体接近50 m,建筑物的功能布置及外立面如图1~2 所示。其中,1 层为出入口,2~4 层为SUV 停车层,5~12 层为小轿车停车层,共275 个车位。外立面采用斜向铝板百叶格栅,兼顾美观、防水及通风散热功能。

图1 建筑剖面图

图2 建筑物立面
本工程主体框架采用钢筋混凝土结构。本工程所服务的客户群体为上班族,主要诉求为上班时间的存车及下班时间的取车。根据设计的适用性、客户群体需求特征、存取时运行的距离、存取效率以及现存立体车库车辆停放方式的调研,采用单一出入口,5台升降机横向分布的形式设计立体车库,早高峰时只允许存车,晚高峰时只允许取车,在有限的场地内,最大程度增加升降机及横移台车的数量,以提高存取车效率,增加出入口的数量,以减少搬运器运行前的人为准备时间,提高机械利用效率。同时,在每个出入口门头设置LED 大屏,显示每个库剩余车位数,便于快速判断并做出停车决定。基于此,本工程平面布置如图3 所示。

图3 平面布置
2 立体车库结构和工作原理
2.1 立体车库结构组成
平面移动式立体车库常规布局为对面双开,中间为横移台车轨道,停车位在轨道两侧逐层排布。立体车库系统主要包含机械系统、管理系统、监控及报警系统等。
机械系统主要由出入口、升降机、横移台车、搬运器、梳齿架等组成。针对机械系统,如果在车库的楼层数增加或横移台车的跨距较大等情况下,一套设备就很难完成了,有时,可能一台升降机配置多台横移台车,或者增加较多的出入口[15]。管理系统主要包括控制系统和上位机系统,控制系统是对整个机械系统进行控制操作,上位机系统用于协调控制车库整体,本文重点介绍控制系统。
2.2 工作原理
控制系统是车库的“大脑中枢”,主要实现车库车位分配、调度设备的路径规划、升降横移装置运行、车辆信息识别等,车库管理人员可通过计算机控制系统对立体车库进行控制管理。
升降机是车库各层作业的联动设备,通过升降电机与钢架的组合,实现升降装置在立体车库层与层之间的调度移动。常规横移台车只能在固定轨道上前进或后退,本工程在常规横移台车上增加了旋转机构,横移台车具有横向平移和旋转掉头功能,台车的导轨为悬空导轨,如图4所示。行走轮每2个为1 组,2 组主动轮由电机+柔性长轴传动,另2 组为从动轮。

图4 横移台车
搬运器是接送车辆的设备,为伸缩梳齿式。待命状态时,梳齿收回在搬运器内部;搬运车辆时,先将梳齿伸出到位,再上升,搬运完成后,先下降,再把梳齿收回到位。该搬运器的优点为因搬运器收回在内部,在行走过程中,只需满足搬运器主框架的宽度,占用空间小,提高了车库内部的空间使用率。
进出口平台包括停车梳齿架、车辆定位器、平台横杆、行程开关、前轮定位器及前轮阻车器等,如图5 所示。停车梳齿架为车辆整体停放区域,每个梳齿架上有滑轮装置,方便后期搬运器搬运时对车辆进行对中纠偏滑动且保证车辆不会受到损害,车辆定位器位置处右前轮部分,为感应部件,当车辆行驶至该处时,设备默认车辆已停放到位。前轮阻车器为出入口梳齿架停车平台前端防护机构。当库内无车时,该设备处于升起状态,保证车辆入库时不会因失误冲出停车区域,搬运器举起车辆离开平台时,阻车器需提前下降。车库内各类光电的作用保证车辆未处于超长、超宽、超高、无人的状态,并发送各类信号给管理系统,管理系统随即进行存车动作。
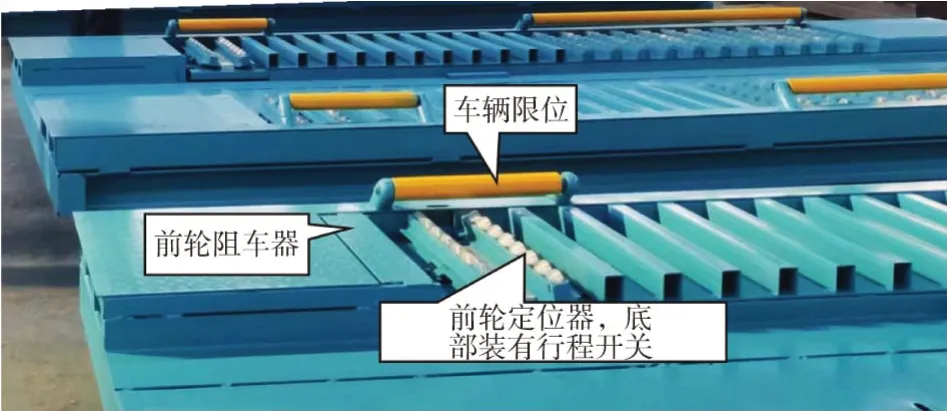
图5 进出口平台
整个存取车过程如图6 所示,车库门附近的地感线圈检测到车辆后打开卷帘门,用户将车辆停入出入口,在触摸屏上点击“存车”,卷帘门关闭,巷道侧卷帘门开启,搬运器移动车辆到横移台车,横移台车平面移动到升降机,升降机将车送到指定楼层,横移台车+搬运机器人将车送入指定车位;取车时,在上述动作的基础上,需增加升降机+横移台车先移动至所取车辆所在楼层和车位,在横移台车运动至地面层时还需增加车辆旋转掉头功能,保证到达出入口的车辆停放位置正确。

图6 存取车流程
3 控制系统设计
平面移动式立体车库的整个控制系统主要由设备层、控制层以及管理层构成,这3 个层次架构之间应用网络进行通信连接,组成了完整的立体车库控制系统[8]。底层为设备层,中间层为控制层,顶层为管理层。设备层主要包括升降电机、横移电机、旋转电机、定位销电机、变频器等执行元件及各种光电开关、限位开关、测距仪等检测元件;控制层主要是分布式I/O 设计的PLC 控制器,起到上传下达的作用,接收上位机发送的存取车执行指令,执行相关的控制程序,并将停车位状态发送给上位机,对不同种类的传感器进行数据采集,并控制其他执行元件有序运行,协调完成存取车任务[5]。顶层由上位机构成,与下位机PLC 之间通过网络进行通信。通过调研目标客户群体,决定本工程的管理系统主要包含场外诱导系统、场内诱导系统、收费运营管理系统并与武汉停车系统、停车场管理、基本信息管理、可视化监管平台、数字孪生系统、智能调度平台和视频监控系统等对接,其上位机监控程序是在VS2019 环境下,用C#语言编写完成的,数据库为SQL Server2012。
停车装置的控制系统框架如图7 所示。结合项目实际需要和工程成本考虑,升降机控制系统PLC选用西门子S7-1500,横移台车、出入口控制系统PLC 选用西门子S7-1200。相比S7-300/400,其系统性能、CPU 显示面板、标准通信接口、诊断机制、编程组态软件都有较大提高,1500系列在多通信方式、扩展能力、集成度、程序结构方面比1200系列更为强大。变频器选用西门子G120系列,它具备多段速调速功能,只需要通过数字量输入即可实现双方向及双转速的控制。根据车库适合存放的汽车类型、电机最大负载时所需的转矩和速度等因素,选用SEW厂家的三相异步电动机,其中升降电机功率为7.5 kW。

图7 控制系统框架
4 PLC控制程序设计
PLC 由CPU、指令及数据内存、输入/输出接口、电源、数字模拟转换等功能单元组成,其在扩展性和可靠性方面的优势使其被广泛应用于各类工业控制领域。PLC 采用的是扫描工作方式,重复执行程序[3],分为3 个阶段,分别是输入采样、程序执行和输出刷新[9]。可编程逻辑控制器的CPU 以一定的扫描速度重复执行上述3个阶段。
在进行PLC 控制程序设计时,要保证程序结构清晰明了,最大程度地提高车库运行效率,同时兼顾安全性和扩展性。本工程PLC 采用博图v16 完成程序的编写,其主要功能为:(1)执行机构逻辑程序;(2)故障报警提示;(3)信号处理与存储;(4)与上位机通信进行数据交互;(5)与其他外部设备进行通信组态连接。PLC控制程序组成结构如图8 所示。程序编写采用面向电机对象编程的方式,每个电机所需要执行的动作都单独建立FB功能块,在功能块内部使用局部变量,在主程序中调用时使用外部输入信号触发,返回输出信号。编写程序时,将每个电机所执行的动作都分为手动和自动模式,在输入信号参数中传入不同的变量值即可执行不同的模式。故障报警提示、信号处理与存储、上位机数据交互等程序采用FC 功能块进行封装,并最终在OBI组织块中被调用。OBI 主程序通过调用FC 功能块进行程序控制。在程序编写时,保证车辆旋转掉头和横向平移同步完成,减少取车时间。

图8 程序结构
5 调试及试运行
采用SIMATIC HMI 监控设备的运行,程序编写软件为WinCC flexible。工作人员可以通过系统界面观察升降机和搬运器的运行位置,并且能够从从机当前状态栏观察从机执行任务的状态。操作员可直接通过HMI 的触摸屏对升降机主PLC 进行操作。通过HMI 设备,操作员还可以实现手自动切换、切换停机、模拟手动刷卡等操作。试运行阶段平均存车时间为135 s,平均取车时间为165 s。理论计算的存车时间为116.05 s,取车时间为146.05 s。因组装设备的各零部件需磨合,试运行期间,人为降低了设备的运行速度。0.5 a 的试运行期结束后,存车平均时间可达到120 s,取车平均时间可达到150 s,与理论值接近。试运行期,停车设备故障率为4%,市场水平为5%~10%,低于市场平均水平。综述,该车库运行平稳,满足使用和可靠性要求。现场操作屏界面如图9 所示,车库调试界面如图10 所示,建成后车库内部实景如图11所示,触摸屏界面如图12所示。

图9 现场操作屏界面

图10 车库调试界面

图12 触摸屏界面
存取车时间理论计算过程如下。
存车时间为:
式中:t1为搬运器运行时间,搬运器速度为0.75 m/s,搬运距离为24.6 m,故合计32.8 s;t2为设备缓冲时间(2次来回);t3为升降机运行时间,升降机速度为0.8 m/s,升降高度为30 m(以最高楼层来计算),故合计37.5 s;t4为设备缓冲时间,取2 s;t5为横移台车时间,设备速度为0.8 m/s,长度为12.6 m,故合计15.75 s;t6为设备缓冲时间(2次横移),取6 s;t7为卷帘门关闭时间,取6 s。
取车时间为:
式中:T1为取车时搬运器运行时间,因存车时需完成的动作在取车时均需完成,故时长一致,取116.05 s;t8为横移台车的旋转时间,取15 s;t9为升降机找寻车位时间,因停车位置随机,根据统计数据,预估为15 s。
6 结束语
本文以武汉市武昌区某一大型平面移动式立体车库为研究对象,从建筑平面布置、车库结构、控制系统及程序设计等方面进行研究并进行了测试及试运行,得出如下结论,为今后该类型项目提供设计经验及参考:
(1)在建筑平面布置时,对周边客户群体进行提前摸排,了解相关需求,意向设备厂家提前介入,综合客户需求、工程投资、建设用地等方面对车库进行选型和平面布置。
(2)对平面移动式立体车库控制系统进行了分析设计,根据工程投资、硬件在控制系统中的重要性等方面对整个车库控制系统的硬件进行了选型和设计,包括PLC控制器、各执行电机、变频器等。
(3)采用西门子S7-1500和S7-1200 PLC作为下位机控制器,使用TIA PROTAL v16作为开发工具,分析确定了下位机软件程序结构,采用模块化和分层的设计思路对功能进行封装,对主、从PLC 进行程序设计并完成了调试及试运行。测试结果显示该车库运行效率、故障率均满足要求,其中存取车时间与理论计算时间基本接近,说明车库各零件磨合良好,程序设计达到既定功能要求。
伴随经济的发展,平面移动式立体车库有巨大的市场空间,但其产品性能稳定性及普适性均较差,导致市场接受度较低,本文虽对其进行了一定程度的研究,但因自身理论水平、设计经验及时间等方面因素的影响,对上位机系统未进行详细研究,上位机系统中的收费系统与相关平台的对接、存取车预约等均有很大的优化和提升空间。
