基于柔索长度偏差的踝关节康复机器人训练模式优化*
2023-12-13唐小强张化平把翠芳
唐小强,张化平,刘 杰,周 阳,把翠芳
(兰州石化职业技术大学机械工程学院,兰州 730060)
0 引言
人体踝关节与膝关节是人体骨骼关节中最为复杂的关节,其自身包含很多小关节、各小关节之间附着有肌肉韧带组织,是人体距离地面最近的关节,在保持身体平衡维持稳定方面起着重要作用[1]。踝关节损伤也是临床上最常见的外科损伤之一。据统计,在所有运动损伤中踝关节损伤约10%~30%[2]。当前,针对踝关节损伤的主要康复手段有本体感觉训练、肌力训练及耐力训练、运动疗法、平衡稳定训练等[3-4]。康复医师借助康复机器人对患者踝关节进行康复训练,一方面可以解放医师的双手,极大地降低了康复医师的体能消耗,从而将更多的精力投入到康复训练策略和训练模式的制定上[5];另一方面,机器人能不折不扣地执行康复训练师制定的一系列康复训练内容,弥补了传统康复训练中存在的不足[6-7]。踝关节属于远端关节,在功能性康复训练领域研究成果明显小于近端关节的研究[8]。踝关节康复机器人的设计应首先考虑踝关节本身的生理结构,并符合人机工程学设计理念。踝关节背屈/跖屈、内翻/外翻、内旋/外旋运动并非单一的三轴运动,而是3 个方向相互关联的耦合运动[6-9]。相较于国外,我国康复机器人方面的研究起步较晚,但随着我国综合国力的不断提升,国家在康复医疗领域投入了大量研究经费,近些年也取得了很多关键技术方面的突破。并联机器人是当下踝关节康复机器人研究的一个热点,北京工业大学李剑锋等[2]先后提出了3-RPS、3-UPS/RRR、2-UPS/RRR 踝关节康复并联机构,其中3-RPS 踝关节康复并联机构结构简单、具有远程固定回转中心。燕山大学刘艳辉等[10]提出了可实现踝关节联动的2-RRR/UPU 构型和2-RRR/URU 构型,这种机器人构型能实现输入输出之间具备部分解耦特性,方便康复医师对机器人进行实时控制。踝关节运动轨迹分析方面,中国刑事警察学院刘旭等[11]采用英国Codamotion 三维动作分析系统采集了正常步态下踝关节的运动轨迹,对踝关节步态数据进行均值和标准差方法进行处理,并引入最长公共子序列算法对踝关节转角曲线进行了评估研究。踝关节机器人结构设计大多考虑了机器人本体运动的平稳性,但针对踝关节自身运动模式与机器人运动匹配方面考虑较少,本文结合康复机器人柔索运动规律对柔索牵引踝关节康复机器人在不同康复训练模式下的运动规律进行优化。
1 踝关节构型与康复训练
1.1 踝关节运动分析
在医学上,通常将人体踝关节的运动按照运动模式和运动范围分为背伸/跖屈、内翻/外翻、内旋/外旋,这三类运动模式近似地绕矢状轴、冠状轴和垂直轴的转动,即踝关节可以近似于具有3 个转动自由度的空间3R 关节[12-16]。其运动模式如图1所示。

图1 踝关节运动模式
根据文献[10]和[16],踝关节的背屈的转角约为25°,跖屈转角约为40°,内翻转角约为30°,外翻转角约为20°,内旋转角约为40°。外旋转角约为30°。正弦函数变化平稳,可求解性强,为此,将踝关节的3R运动使用正弦函数模拟,如式1所示。
式中:α为绕XP轴的转角,α为正表示内翻,为负表示外翻;β为绕YP轴的转角,β为正表示内旋,为负表示外旋;γ为绕ZP轴的转角,γ为正表示背屈,为负表示跖屈;t为时间。
1.2 踝关节康复训练
本文所述踝关节康复训练借助柔索牵引踝关节康复机器人完成,所述运动模式均在被动训练下进行,机器人简化模型如图2所示;机器人动平台受4根柔索驱动完成3R 转动;4 根柔索的一端与动平台球接,另一端穿过固定在机器人支撑结构横梁上的过轮组件,最终与驱动电机的绞盘连接。患者进行康复训练时,受训侧脚使用绷带固定在动平台组件的脚踏板上,驱动电机接收上位机控制信号,转动绞盘牵引动平台实现背伸/跖屈、内翻/外翻、内旋/外旋训练。

图2 柔索牵引模型
康复机器人动平台组件如图3 所示,动平台组件的脚踏板首先与横滚轴(与XP轴重合)通过两轴承铰接,横滚轴的末端通过联轴器与角位移传感器3 连接,角位移传感器3 固定在脚踏板上。脚踏板绕横滚轴实现内翻/外翻训练。横滚轴的前端与俯仰齿轮轴(与ZP轴重合)通过轴承铰接,俯仰齿轮轴的轮齿与检测齿轮轴的轮齿互相啮合,检测齿轮轴末端经联轴器与固定在偏转轴上的俯仰角位移传感器3 连接。脚踏板、横滚轴、连同固定在其上的所有零组件可绕俯仰齿轮轴转动,实现背屈/跖屈训练。偏转轴(与YP轴重合)通过轴承与固定座铰接;偏转轴末端通过联轴器与偏转角位移传感器2连接。脚踏板、横滚轴、俯仰齿轮轴、偏转轴连同固定在其上的所有零组件可绕固定座实现内旋/外旋训练。

图3 动平台组件结构
横滚轴XP、俯仰齿轮轴ZP、偏转轴YP的旋转轴线互相正交于一点,组成XPZPYP串联模型,3 个轴的转角变化由安装在其末端的角位移传感器直接检测,并反馈给上位机,使整个系统实现全闭环控制。
2 机器人柔索长度变化规律
假设基坐标系O-XYZ与动平台组件坐标系OPXPYPZP在零位(即α、β、γ均为0)重合;动平台转动时,XP轴随ZP轴运动,ZP轴随YP轴运动,因此,当柔索牵引踏板组件绕坐标系OP-XPYPZP的3 个轴转动时,其旋转矩阵如式(2)所示。
根据机器人构型,脚踏板组件上各柔索连接点[Pix,Piy,Piz]的坐标矩阵为:
以柔索1为例,建立如图3所示柔索长度模型。
从图4可知,Ci点为4个过轮相对于机架的固定点(柔索与过轮垂直相切的位置),4 个过轮中心点Bi点位置可通过式(4)求得。过轮与柔索切点Ti的位置可通过式(5)求得。

图4 柔索长度模型
式中:Ni为4 个过轮平面的法向量,可通过向量CiMi(始终与YP轴平行)与向量CiPi的向量积求得;Ciy为Ci点在坐标系O-XYZ中的Y坐标,Biy为4 个过轮中心点在坐标系O-XYZ中的Y坐标,康复训练过程中过轮中心点的Y坐标始终不变;r为过轮半径。
则柔索长度变化规律为:
结合式(1)~(6),根据踝关节康复机器人空间构型,在MATLAB 中编制脚本程序可得康复训练过程中动平台转角与柔索长度变化之间的关系,如图5 所示。从图可知,在康复训练过程中,柔索1、柔索2、柔索3 的长度变化范围基本一致,在-5~+60 mm 以内;但柔索4的长度变化范围接近前三者变化范围的3 倍,在-35~+180 mm 以内。4 根柔索在相同时间内变化偏差较大不利于机器人柔顺性控制。因此,有必要对踝关节训练模式进行优化。
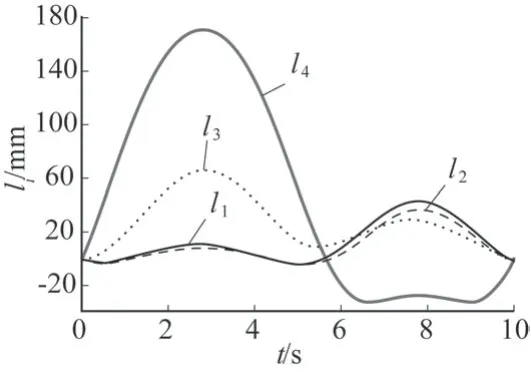
图5 柔索长度变化曲线(α+、β+、γ+)
3 踝关节训练模式优化
3.1 踝关节康复训练模式
结合式(1)、式(6),柔索长度变化直接影响因素为α、β、γ的大小和变化规律;在踝关节变化范围不变的条件下(α、β、γ的大小不变),通过改变踝关节变化规律使四根的柔索长度变化偏差最小。
取式(1)中转角α分析可知,满足内翻转角为30°,外翻转角为20°的正弦函数还可以表示为:
由此可知,α、β、γ的变化规律各有两种,以“+”表示式(1)中的变化规律,以“-”表示式(7)中的变化规律,对其自由组合可有8种康复训练模式,如表1所示。
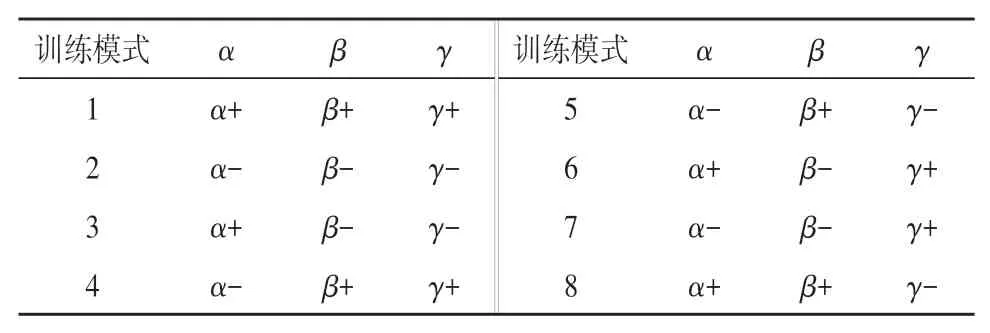
表1 踝关节康复训练模式
3.2 仿真分析
在Simulink中搭建柔索长度运动仿真模型,如图6所示。通过更改机器人运动学模型中的自定义函数,结合表1对剩余7种训练模式进行仿真分析,结果如图7~10所示。

图6 柔索长度仿真模型

图7 柔索长度变化曲线(训练模式2)
3.3 结果与讨论
对比图5 与图7,两种训练模式下动平台转角相反,其柔索运动规律也相反;同理图8(a)与图8(b)、图9(a)与图9(b)、图10(a)与图10(b)都存在相同规律;对比图5、图7~10,图10(a)和图10(b)中4根柔索长度变化偏差最小,柔索长度最大变化范围为-30~+150 mm,最小变化范围为-10~+70 mm,相比初始图4,4根柔索的长度变化偏差相比于训练模式1、2缩小了30%。因此,以4 根柔索长度变化偏差最小为优化边界,图10(a)、图10(b)为最优结果,即α+、β+、γ-或α-、β-、γ+为最佳康复训练模式。

图8 柔索长度变化曲线(训练模式3、4)

图9 柔索长度变化曲线(训练模式5、6)

图10 柔索长度变化曲线(训练模式7、8)
4 结束语
本文首先通过分析踝关节运动范围和运动模式,将踝关节背屈/跖屈、内翻/外翻、内旋/外旋运动看做空间3R 运动,使用正弦函数来模拟踝关节的空间3R 运动规律。在此基础上,建立了运动模式为XPZPYP串联模型柔索牵引踝关节康复机器人构型,患者受训侧脚通过绷带与脚踏板柔性连接完成康复训练;其次,建立了柔索牵引踝关节康复机器柔索运动学模型,为了解决单一训练模式下4 根柔索长度变化范围偏差过大的问题(最小范围-5~+60 mm,最大范围-35~+180 mm),提出了8种踝关节康复训练模式;以柔索长度变化范围偏差最小为优化边界,最终确定α+、β+、γ-或α-、β-、γ+为柔索牵引踝关节康复训练机器人的最佳康复训练模式,两种训练模式下柔索长度最小变化范围为-10~+70 mm,最大变化范围为-30~+150 mm;相比优化前的柔索长度变化范围偏差缩小了30%,方便机器人驱动模块统一化选型,提高了机器人的柔顺性控制。优化后的训练模式有利于踝关节损伤初期患者患侧脚在最小摆动下(下肢肌群收缩幅度最小),完成全行程的背屈/跖屈、内翻/外翻、内旋/外旋康复训练,有效降低了因提高关节活动度而造成下肢肌群二次损伤的风险。
