基于NX MCD虚拟调试的三轴桁架搬运机械手设计*
2023-12-13丁云鹏冯国铜李克强赵洪锋薛迎春
丁云鹏,冯国铜,李克强,赵洪锋,薛迎春,王 勇
(1.苏州工业职业技术学院精密制造工程系,江苏 苏州 215104;2.宁德时代新能源科技股份有限公司,福建 宁德 352000;3.苏州麻雀智能科技有限公司,江苏 苏州 215156)
0 引言
机械装备的数字化和智能化是当前制造业转型升级的重点和难点。当前的机械装备还是以传统的基于物理样机的研发和生产组织形式为主,设计过程通常由来自机械、电气、自动化等不同学科团队的工程师在各自专业领域软件平台上单独完成,存在研发周期长、设计变更多、制造成本高、性能不确定等技术问题,严重制约了传统制造企业向智造企业转型升级[1]。
虚拟调试技术可以在虚拟环境中对机械装置进行数字化实验,可以模拟生产系统的真实状况,缩短生产线和自动化设备的现场调试时间、优化节拍时间、提高生产效率及降低现场调试风险[2]。西门子NX MCD (Mechatronics Concept Designer,MCD)平台支持机械、电气和自动化等多学科技术人员并行协同设计与仿真,是虚拟制造仿真领域的领先解决方案。近年来国内外学者利用NX MCD 平台在各领域展开了应用研究。Bank HS 等[3]和Wang J 等[4]利用NX MCD 平台对龙门机器人和关节机器人进行了运动仿真。Qin R 等[5]利用NX MCD 平台上对冷头机传动机构进行了虚拟调试。国内邢学快[6]、兰涛[7]、林裕程[8]、赵飞[9]、赵永信[10]等分别利用MCD 平台对包装流水线、拆码垛机、数控机床、四工位刀架、气动手爪进行了机电一体化的协同设计。
本文以自动化生产中的桁架机械手设计为例,利用NX MCD、TIA、PLCSIM Advanced 等软件对桁架机械手进行机械结构设计、电气控制系统设计及MCD-TIA 机电联合虚拟调试,进一步完成样机设备的试制。
1 整体设计思路
桁架搬运机械手是现代化码垛技术中应用最广泛的自动化生产装备之一,以其高柔性、高处理能力和高可靠性的特性,使其成为码垛领域的流行趋势[11]。 本文基于NX MCD 平台采用虚拟调试的手段,将三轴桁架机械手的设计流程分为:整机结构概念设计、电气设计、PLC 控制程序设计、HMI人机交互界面设计、机电一体化联合虚拟调试、机械结构详细设计6 个部分,设计流程如图1所示[12]。
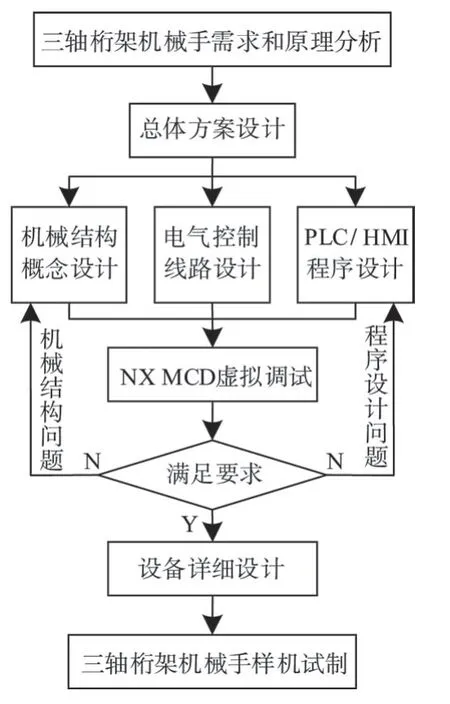
图1 桁架机械手设计流程
2 桁架搬运机械手概念设计
2.1 机械概念设计
在NX CAD 模块下建立桁架搬运机械手的概念模型,该模型根据产品的目标定位和功能要求进行整体设计,可反映出整个机构的主要空间形状和位置关系,以及零部件之间的约束条件,直观上反应设备的整体框架,桁架机械手概念模型如图2所示。

图2 桁架机械手概念模型
本文设计的桁架机械手主要用于高职课堂教学使用,验证学生编写的PLC搬运程序,实际工况要求如下:
(1)物料为直径50 mm,高50 mm 圆柱形棒料,垛板为3×3的9宫格平板,标记号码;
(2)工作台尺寸1 200 mm×800 mm钢板;
(3)X轴运动范围为0~700 mm,Y轴运动范围为0~470 mm,Z轴运动范围为-100~0 mm;重复定位精度为0.5 mm。
制定桁架机械手搬运过程的工作路径,通过示教1号位零件的搬运过程自动完成全部零件的搬运,如图3所示。机械手通过气动卡盘抓取零件。

图3 桁架机械手码垛运动轨迹
(1)料台传感器接收到有料发出信号,控制系统接收信号桁架机械手从零位(A点)经过中间点(B点)运动到料台上方(C点),记录示教点位置;
(2)Z轴向负方向运动到夹取位置(D点),记录示教点位置,控制系统发出指令,气泵启动,机械手卡爪抓紧,同时料台卡爪松开,卡爪带物料缓慢上升至垛盘1号位置上方(E点);
(3)Z轴缓缓下降至1 号位置(F点),控制系统发出指令,气泵启动,卡爪松开,放置物料1 号,同时记录示教点位置,Z轴移至物料台上方(C点),重复上述运动,码垛完成9个工件,复位至零点(A点)。
2.2 控制柜设计
电气控制柜是桁架机械手的控制中心,本项目为了便于教学使用,将控制柜设计成便携快插形式。桁架机械手控制系统采用PLC 来实现系统的逻辑控制,根据CPU 性能及控制柜紧凑性要求,选取西门子S7-1500 系列PLC,根据桁架机械手控制需求,选取16输入/16输出的数字量输入输出模块,同时,为了方便教学过程中拓展机械手功能,预留16输入/16输出的模拟量输入输出模块。共32个数字量I/O总点数,32个模拟量I/O总点数。
输入点包括控机械手3 个轴的限位开关、气缸的限位开关、伺服的报警、启动按钮、急停按钮等;输出点主要是两个电磁阀的控制;并且该系统的冗余为30% ,能够满足机械手的预设工况及教学拓展的使用需求。
人机交互界面可以实现操作者和机械手的沟通桥梁,可以理解为六轴机器人的示教器。本文选用西门子品牌7 英寸(1 in=2.54 cm)的触摸屏,对桁架机械手和操作画面进行组态,方便生产人员进行操作和监控。PLC 和HMI及西门子伺服驱动器的通信采用Profinet 总线方式,因此需要配有4 个通道的以太网交换机。控制柜的外型如图4所示。

图4 控制柜实物
2.3 PLC程序设计
(1)桁架机械手运动控制程序设计。在启动控制系统时,分别将X轴、Y轴、Z轴进行归零处理;在接收到HMI 示教指令时能够对机械手进行示教;在HMI 发出入库指令时,按照HMI 输入的速度控制三轴运动准确运行到料架的上方并对物料进行抓取;控制料架及卡爪按照要求进行夹紧和放松;按照HMI 输入的料盒号码控制三轴运动,准确运行到指定料盒位置进行放料;搬运物料的数量能够准确记录。机械手在正常工作时需要按照图5 所示的流程自动完成物料搬运,但为了方便示教及调试,同时为机械手添加了手动控制方式。

图5 PLC控制逻辑图
(2)人机交互界面设计。根据功能需求,人机交互截面设计了手动运行模型和自动运行模式两个画面。
在手动运行模式画面中,能够进行设备管理,显示运行模式及状态,对轴进行激活、复位、一键回零。同时,能够采用手动方式设置三轴的运行速度并且控制三轴进行点动,从而调试三轴的运行;能够手动控制抓料及装料气缸进行夹紧或放松,从而实现对气缸的调试;能够手动输入料盘位置进行自动上料、下料测试。手动模式画面如图6所示。

图6 手动模式交互界面设计
在自动运行模式画面中,能够对三轴进行激活、复位,同时显示三轴的运行状态;能够输入料盘位置及速度控制机械手单次自动化上料、下料;能够控制机械手进行连续上料、下料;能够对物料数量进行清零。自动模式画面如图7所示。
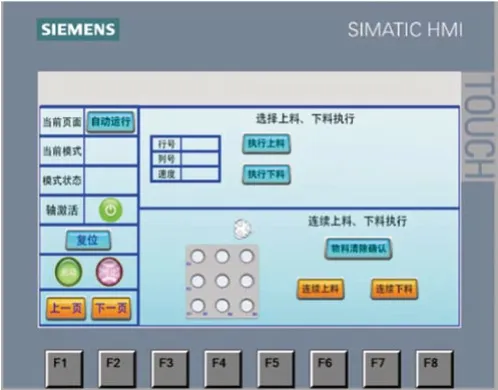
图7 自动模式交互界面设计
3 基于NX MCD软件的机电联合仿真
针对码垛机械手搬运过程,利用NX MCD 机电一体化仿真平台对机械结构和电气控制进行联合仿真,主要步骤包括[13]:基本机电对象运动约束、执行驱动、信号配置的设置,以及博途与NX MCD 通信连接,最终实现通过博途PLC 程序控制NX MCD 中的码垛机械手的搬运仿真。
3.1 内部仿真环境搭建
搭建过程分为以下几个步骤。
(1)创建刚体。刚体属性可以使几何对象具有物理属性,如重力;将X轴、Y轴、Z轴、机械手卡爪及物料设置为刚体。
(2)创建碰撞体。在物理模拟中,只有两个刚体对象都被定义为碰撞体,两者才会相互碰撞,非碰撞体的刚体则会相互穿过;将物料和物料台的位点底面定义为碰撞体。
(3)定义对象源。将物料设置为对象源,前一物料被抓走后,产生新的物料,触发条件为每次激活时设置一次。
(4)创建运动副。滑动副仅具有一个平移自由度,构成滑动副的两个组件只能沿某个方向移动,可以通过设置上限、下限实现限位。把X轴、Y轴、Z轴、机械手设置为滑动副;机械手的3 个卡爪也定义为滑动副,以抓取、释放物料;为了实现抓取运动,需将机械手卡爪设置为固定副。
(5)创建位置控制。位置控制定义是用来驱动运动副运动,并且限制运动副的自由度;为X轴、Y轴、Z轴添加位置控制。
(6)创建传感器。根据功能需要,定义固定检测和物料检测两个传感器;对机械手设置“固定检测”碰撞传感器以检测物料,当该传感器检测到物料时,传递信号给卡爪而抓取物体;对物料台设置“物料检测”碰撞传感器,用来检测是否出现新的物料。
(7)创建信号。三轴机械手搬运机构所需信号配置如表1所示。

表1 机械手搬运信号配置
(8)创建运行时参数。添加5 个运行时参数,分别是Grab、Check、Lay 和Finish,数据类型均为布尔型,Position为整型;Grab是取物料,Check是判断物料,Lay为放物料,Finish 对应于所有步骤完成,Position 表示机械手运动位置。
3.2 创建仿真序列
仿真序列总体如图8 所示。首先是物料源,在物料被抓走后产生新的物料;随后就是取物料的环节,制定X轴、Y轴、Z轴的运动轨迹使其运动到物料上方,卡爪张开、固定物料,抓住物料;接着,机械手移动到物料台位点1的位置;判断是否运送完第一个物料,以继续下一步操作;取消固定、卡爪张开,放开物料到物料台上。

图8 总体仿真序列
(1)X、Y——机械手X、Y方向移动。对象选择机械手X、Y轴的控制信号,设置其位置参数为Y15、X355。设置其条件为:Grab信号为true的时候执行此操作。
(2)Z_Movedown(机械手向下移动)。对象选择机械手Z轴的控制信号,设置其位置参数为Z51。设置其条件为:X_OUT信号为到达334.5位置的时候执行此操作。
(3)机械手抓取物料。为机械手设置名为“固定检测”的碰撞传感器,当机械手碰撞传感器碰到物料时,固定检测变为ture,机械手卡爪张开,固定副生效,机械手抓住物料。
(4)新的物料产生。当信号Null为true时,说明物料被运走,需要产生新的物料,时间间隔设置为0.001 s。
(5)机械手搬运物料。对象选择机械手X、Y轴的控制信号,设置其位置参数为X0Y0,使其运动到物料台。
(6)机械手释放物料。对象选择机械手Z轴的控制信号,设置其位置参数为Z103.5,使其运动到物料台位点1,松开卡爪、固定副固定作用取消,物料随之被放下,第一次搬运完成。
3.3 虚拟调试
(1)配置博途软件。按照设置的信号编写PLC程序,配置PLC SIMADV,新建信号通道。
(2)配置MCD 与PLC 信号。打开NX MCD 模块以调试连接,如图9所示,“外部信号设置”选择上一步骤新建的888信号通道,选择IOM变量,点击“更新标记”,在标记栏中勾选“全选”,单击“确定”,信号映射设置完毕。

图9 外部信号配置
PLCSIM Adv 客户端参数设置如图9 所示,在主页→自动化组→符号表中下拉找到PLCSIM Adanced 客户端参数设置,类型选择PLCSIM Adv,通道信号选择888,MCD与PLC的变量是一一对应,点击“执行自动映射”。
(3)机电一体化联合调试。通过PLC_SIM-Adv 将MCD 与博图V16 连接[14],将第一步中编辑的博图程序下载到仿真软件MCD 中,点击博图任务栏的“启用监禁”,回到MCD 中点击“播放”按钮。运行效果如图10 所示:机械手处于起始位置→碰撞传感器检测到有物料→机械手根据编写的程序去抓取物料→机械手根据信号控制将物料放到物料台第一个位点位置,循环执行取料→搬运→放料过程,直至物料台被放满物料时停止。

图10 虚拟调试效果
3.4 详细设计
基于调试好的概念模型,通过运动模组、传感器、启动卡爪的选型,以及非标连接件的设计,将概念模型替换为详细模型,实现物理定义转换[15],便于后续样机设备的试制。详细模型设计结果如图11所示。

图11 设计完成效果
4 结束语
西门子NX MCD平台的出现和发展为复杂机械设备的协同设计提供了新的思路,特别是对涉及机械、电气、自动化等多学科的交叉产品设计。本文作者以三轴桁架机械手设计为例,详细阐述了利用西门子NX MCD仿真平台进行进行产品的数字化设计,从机械手的功能分析和概念设计开始,同步进行电气程序编制和人机交互界面设计,然后在仿真平台内完成机械手的机电一体化联合调试,最后对产品辅件进行选型,完成机电设备的详细设计。西门子NX MCD 瓶体提供了一种新的虚拟调试手段。该方法有利于团队协作同步开展并行设计,能够大大缩短产品开发周期,为机械设备数字化设计提供一种有效路径。
