机器人碰撞检测方法研究进展*
2023-12-13林义忠谢震鹏
林义忠,谢震鹏
(广西大学机械工程学院,南宁 530004)
0 引言
在劳动力成本上升和人工智能快速发展的背景下,机器人使用数量和应用领域都在迅速扩大[1]。除了传统制造业外,机器人还逐步应用于航天、深海、军事、医疗康复、生活援助等方面,其工作环境更加复杂、人机协作更加密切。目前常用的开链式串联机器人具有工作空间大和工作路径复杂的特点,在工作过程中极易与环境物体或者人员发生碰撞,造成物品损坏和人员伤亡。因此,有必要开展机器人的碰撞检测理论和检测方法研究。
碰撞会损害机器人本体,同时也可能使人受到伤害,因此,安全是机器人最重要的指标之一。针对机器人安全防护的碰撞检测,国内外学者和工业界进行了深入研究,并取得了一系列的研究成果。
在现有机器人的各种碰撞检测与安全防护技术中,按照空间距离可以分为非接触式和接触式。第一类包括轨迹规划、模拟仿真、接近检测、3D 视觉避障等方法,由于受到实时性和使用成本等因素的制约,多应用于事前规划和低速的场合,在高速运行的工业机器人上较少投入使用。第二类包括开关式碰撞检测法(Collision Detection Switch,CDS)、触觉传感器检测法、接触力检测法和驱动电流异常检测法等。
本文围绕非接触式和接触式两类碰撞检测方法和安全防护技术,综述国内外机器人碰撞检测方法。给出了当前机器人安全防护的碰撞检测方法的研究进展以及应用情况,分析各种方法的优点和缺点,并对协作机器人的安全防护技术进行了展望。
1 非接触式碰撞检测方法
1.1 视觉识别避障
随着人工智能理论的快速发展,视觉识别与避障成为了机器人领域的研究热点,国内外研究人员进行了大量的相关研究并取得了较多成果。重点为移动机器人的路径识别与避障,涉及到工业生产、农业机械和服务娱乐等行业,研究的内容有图像识别、双目视觉定位、手眼协调及坐标的变换与标定等[2-6]。
视觉避障主要以相机获取周围环境信息,通过建立地图或模型进行碰撞检测。陈星辰[7]提出一种基于Kinect V2 传感器动态障碍物的检测方法,利用三帧差分法进行动态目标检测,从而获取障碍物的点云数据以及三维包围盒信息,利用基于AABBB包围盒的碰撞检测方法进行碰撞检测,最终结合所提出的路径规划法实现了避障。赵超力[8]使用双目相机获取机器人周围环境信息,通过Canny 算子以及双目视觉定位算法确定三维空间中障碍物的位置信息,提出基于简化模型的包围盒碰撞检测方法,减少了碰撞检测的时间。张琪[9]针对AABB包围盒中三角片的大小不均匀会导致包围盒不能有效逐层收缩的问题,提出了一种改进包围盒树构造方法,该方法基于三角片分割,引入两个变量分别控制三角片的个数以及三角片分割粒度。Moore等[10]提出一种基于八叉树的空间分割方法,该方法将整个空间逐渐分割成等体积的规则空间,同时就将整个空间中的物体分割成了更小的单位,再以相邻空间或占据同一空间的物体做相交测试,以完成碰撞检测。岳利品等[11]通过使用深度相机实时监测机械臂周围的环境,建立八叉树地图,使用Movelt!功能包处理深度相机采集到的图像数据以及控制机械臂的运动,从而达到当环境中出现动态障碍物时,能检测出障碍物并实现动态避障的效果。高鹏[12]提出了一种应用于人机协作的机器人主动避碰的方法,利用多Kinect 传感器获取人体和机器人的三维结构数据,建立人体仿真模型,并采用卡尔曼滤波进行人体骨架的位置预测,采用分层碰撞检测技术进行碰撞检测。李焕宇[13]使用Kinect2.0相机获取环境中人体数据并计算出其中心在三维空间中的坐标,采用自适应直通滤波器结合统计滤波算法实现人体的三维点云数据的离散点处理和阈值分割,然后利用ICP 算法进行人体点云拼接,设计一种基于AABB 包围盒的层次包围盒算法,实现人体障碍物的检测,仿真结果如图1 所示,最后提出一种改进双向快速扩展随机树的避障轨迹规划算法,该方法能减少轨迹生成时间。
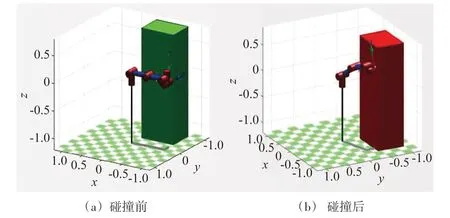
图1 碰撞仿真结果图
机器人的视觉识别与运动避障,在理论上可以通过双摄像头的视觉定位来实现,这一方法最大的问题在于识别的精确性和实时性之间的矛盾,较高的图像分辨率才能够保证识别的精确性,而海量的图像数据必然会造成控制计算机运算结果的时间滞后,所以只能够用于机器人离线识别或者低速运动的避障。
1.2 轨迹规划避障
轨迹规划避障首先需要进行路径规划,在连接起点位置和终点位置的同时,避开过程中的障碍物。路径规划通常是形成一系列的离散点,然后通过拟合曲线拟合成一条路径。完成路径规划后,轨迹规划在根据机器人的动力学模型、约束条件等,产生控制指令,使机器人在某一时间以某种速度和方向通过某个位置,从而使得机器人通过路径规划的路径达到终点位置并且不发生碰撞。因此,轨迹规划避障的避障环节主要在于路径规划。
主流的路径规划方法有基于图搜索的路径规划、基于采样的路径规划和基于人工势场的路径规划。基于图搜索的路径规划是在建立好的地图中利用地图信息来寻找起点位置到终点位置的最优路径的一种方法,该方法的常用算法有A*算法和D*算法。A*算法适用于静态环境的路径规划,D*算法根据A*算法改进,适用于动态环境中的机器人路径规划[14]。宗成星等[15]提出了一种基于A*算法的机械臂路径规划避障方法,该方法建立机械臂和障碍物的三维简化空间模型,利用A*算法搜索最优避障路径,同时利用二次B 样条曲线处理得到的路径,使之平滑,确保机械臂平稳工作。常用的基于采样的路径规划的算法有PRM 算法和RRT 算法。PRM 算法不需要事先建立障碍物模型,适用于高维空间的机器人路径规划,但是该算法搜索的不是最优路径。RRT 算法的优点有建模简单、搜索能力强、可以添加多种约束等,适用于高维空间的机器人动态路径规划,但该算法有节点利用率低、路径不稳定的缺点。薛阳等[16]提出了一种改进PRM 算法,该算法采用近似最近邻搜索中的局部敏感哈希算法构建无向路径图,减少了构建无向路径图的时间,提高了算法的效率。J J Kuffner等[17]提出了一种双向扩展的改进RRT算法RRTConnect,该算法会从起始点和目标点分别向对方生成随机树,并引入贪婪策略。该算法提高了算法的效率,但是算法生成的路径不是最优路径。人工势场法最早由Khatib 提出,在工作空间内建立虚拟力场,障碍物排斥机器人,目标点吸引机器人,然后通过受力分析来得到机器人的加速度以及运动方向,从而使机器人运动到目标点的同时不与障碍物发生碰撞[18]。人工势场法不需要进行全局路径规划,而且实时性好,但是容易出现局部最优以及锁死的情况。
2 接触式碰撞检测方法
2.1 力反馈碰撞检测
在机器人手腕部安装一个多维力传感器,根据反馈力值的变化程度来判断是否发生碰撞。合肥工大的刘正士教授、哈工大的倪风雷博士、大连理工大学的丛明教授等学者在建模、计算、误差标定及动力学分析各个方面对这一课题进行了深入的研究并取得了较多的成果[19-21];加拿大的RBekhti 等[22]设计出一种由硅胶和导电电极层制成传感元件的新型多轴力-扭矩传感器,其优点在于能够测量出应力分布从而减小传感元件网的尺寸。Zhang 等[23]利用六维力传感器,如图2 所示,来感知机器人末端的牵引力,实现了对机器人的力控制。力反馈碰撞测量方法相对比较成熟,有产品投放市场,但是其本身不具有缓冲保护的功能,只适合于在力伺服和柔性臂机器人上使用。

图2 牵引力感知力传感器
2.2 触觉传感器碰撞检测
触觉传感器是根据传感器受到力的作用后,某一参数会相应地发生变化,以此来测量出外力的大小。触觉传感器包括压阻式、压电式、电容式、电感式、光学式、复合式等类型。各种类型的触觉传感器因材料的不同导致工作原理有所不同,相同的是都通过将力等外部信号转变成电信号,建立起外部信号与电信号之间的关联,通过检测电信号来检查外部信号。本文只介绍压电式触觉传感器,各类型触觉传感器对比如表1所示。

表1 各类型触觉传感器对比
机械手的外部包裹一层压电敏感材料,当机器人与外界发生碰撞时,压电敏感材料产生报警电信号。合肥智能机械研究所的梅涛和清华大学的赵东斌等学者对压敏材料PVDF 在机器人防护方面进行了深入的研究[24-25],福州大学的吴海彬提出采用粘弹性包覆层对机械臂加以保护。拉瓦勒大学的Duchaine V 研究小组提出一种由聚酰亚胺膜制成的柔性传感片构成的机器人皮肤[26],后又提出另外一种基于碳黑填充硅树脂(CBF)和导电织物的可拉伸机器人表皮的新设计[27],但是需要使用微加工技术来实现阵列结构,成本较高,且串扰效应影响较大。
压阻式触觉传感器的工作原理主要为压阻效应,压阻材料的电阻率会随着其受到的载荷变化而变化。HUANG C Y 等[28]用半导体硅和弹簧制作了一种半导体柔性阵列式传感器,如图3 所示,可以通过调整弹簧的结构来改变传感器的空间分辨率。Jaeyong Lee 等[29]使用多层碳纳米管涂层织物研制了一种压阻式触觉传感器,该触觉传感器在较宽的压力范围内有较高的灵敏度。

图3 弹簧式半导体硅压阻传感器
电容式触觉传感器主要通过测量平行极板间距改变带来的电容值变化来测量力。安徽大学的Qiu Jie等[30]探索了基于石墨烯微结构介电层的电容式压力传感器,改善了传感器的灵敏度和其他性能,如图4 所示。CHEN Y S等[31]用氧化锌纳米线和聚甲基丙烯酸甲酯制作介电复合层,如图5所示,增强了电容传感器对压力感测的响应。

图4 基于石墨烯微结构介电层的电容传感器
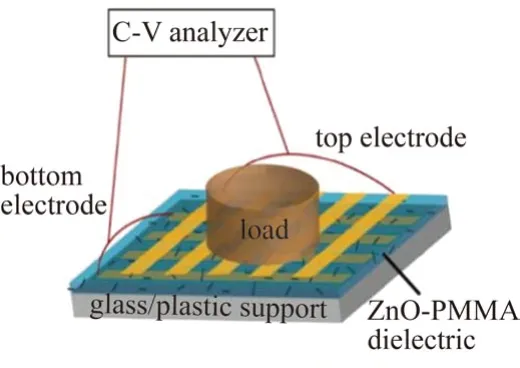
图5 基于氧化锌纳米线等的电容传感器
这一类方法可以实现机器人的整体防护,但是,压敏材料因局部的褶皱变形而极易产生误报警信号,包裹的压敏材料在碰撞中容易损坏,碰撞发生时无法产生变形和缓冲保护作用。
2.3 间接参数碰撞检测
间接参数碰撞检测就是不在机器人外部加装传感器来获取碰撞检测信息,而是通过实时监测机器人的电流、机械阻抗和动量等参数值并与理论计算值比较,当监测值与理论值出现较大的偏差时,就可以判断机械手与外界发生了碰撞。李龙晶等[32]针对净化机器人,提出了一种基于力矩误差的机器人碰撞检测方法,该方法通过机器人的理论位移、速度、加速度以及实际位移、速度来得到干扰力的变化情况,同时设定干扰力阈值来判断是否发生碰撞。福州大学的吴海彬[33]提出一种基于广义动量偏差观测器的间接碰撞检测方法,以及如何解决碰撞检测中加速度噪声干扰的问题,取得了一定的研究成果。福州大学的李智靖等[34]提出了一种基于卷积力矩观测器的机器人碰撞检测,并引入静态LuGre 模型补偿关节摩擦,减小了机器人模型的误差。哈尔滨工业大学刘宏等[35]引入自适应关节动态补偿器使机械臂能够检测碰撞并控制接触力实现机械臂对环境的友好操作。张铁等[36]提出了一种碰撞标量进行碰撞检测,该碰撞标量由机器人实时电流和当前轨迹的误差量合成,当合成的碰撞标量大于碰撞阈值时,可判断机器人发生碰撞。该类方法属于间接测量方法,无须加装外部传感器,结构简单成本低,但检测与反馈会存在一定的时间滞后,且不具备碰撞后的缓冲和保护功能。
3 发展趋势展望
随着机器人技术的发展,机器人完成重复性工作的效率高,而人则可以灵活地辅助机器人完成更加复杂的工作,使得工作效率提高的同时不提高机器人的复杂程度。人机协作的工作方式会应用得更加广泛。由于人与机器人需要接触合作,人机协作中的安全防护技术也显得很重要。
视觉是机器人的眼睛,是机器人安全防护和碰撞检测的一种重要方式。制约视觉应用的原因是数据处理量大,实时性差,数据少且不能保证精度。视觉识别避障未来可能从以下几个方面发展:硬件升级,提升视觉识别避障处理系统硬件设施的数据处理能力,在一定程度上提高了视觉识别避障的实时性;算法优化,使算法处理的数据更少、更有针对性,在保证精度的情况下提高实时性;多传感器融合,如融合激光雷达、红外传感器等,可以得到障碍物的更多信息,提高信息的准确性和互补性。
触觉是机器人仅次于视觉的重要“感知”能力,也是协作机器人未来发展的重要方向之一。触觉传感器碰撞检测未来可能从以下几个方面发展:(1)增强缓冲能力,未来的触觉传感器可能采用可变形的材料制作,使得触觉传感器在碰撞时,可以根据变形情况分析出碰撞发生的位置、碰撞力的大小,且具有缓冲的作用,在一定程度上保护机器人和触觉传感器;(2)柔性化,柔性触觉传感器在弯曲或者拉伸时仍然能保持其优越的性能,能够安装在不同形状的机器人上,并且其能够适应不同物体的材质和硬度,大大减小了自身损坏的可能;(3)增加自愈功能,触觉传感器在使用过程中不可避免的会划破等造成破损,影响其性能,维修和拆装麻烦。拥有自愈能力的触觉传感器就可以像人的皮肤一样,能够自动修复一定程度的破损,增大其安全性和使用寿命。目前大多采用导电水凝胶和聚合度高的弹性体来制作有自愈能力的触觉传感器。
力反馈碰撞检测。力传感器能够检测比触觉传感器更大的力,但是,其通常需要连接机械臂、末端执行器或者外部负载,这些负载的重力、惯性力等影响力传感器对碰撞力的检测。对于力传感器平衡动态力的研究虽然有,但仍不完善。此外,还可以研究在平衡负载重力、惯性力等的情况下,保持力传感器的灵敏度,以及智能调节其灵敏度,如在机器人正常工作时,其末端执行器需要与物体接触时,可以降低其灵敏度,提高报警的阈值,非正常工作时提高灵敏度,检测碰撞力。
4 结束语
本文介绍了机器人安全防护方法,主要围绕非接触式和接触式两类碰撞检测和安全防护技术,归纳了国内外机器人碰撞检测方法及其特点。针对机器人安全防护的碰撞检测方法目前的研究及应用状况,分析了现有机器人碰撞检测方法的不足,并对协作机器人的安全防护技术进行了展望。通过分析和总结机器人安全防护的国内外研究成果,有利于深入研究机器人的安全性能,使协作机器人能在实际应用中发挥更多的作用。
