无信号交叉口横向冲突预警对驾驶行为的影响
2023-12-12万华森苏晏俊洁
万华森,黄 睿,苏晏俊洁,冯 勇
(1.昆明理工大学,交通工程学院,昆明 650500;2.中国铁路,昆明局集团有限公司,昆明 650000)
0 引言
据统计,40%的交通事故发生在交叉口内,其中28%发生在无信号交叉口[1]。交叉口内部区域由多个进口道交织构成,车辆运动进而产生多个冲突点[2],因此无信号交叉口成为道路网络中的危险地点,其中横向冲突是无信号交叉口主要的交通安全隐患之一。由于交叉口右侧的建筑、绿化等设施遮挡,造成驾驶人对右向来车的观察受阻等问题亟待解决。同时智能化、网联化是未来交通发展的趋势,运用车-车、车-路通信环境下的网联车信息共享技术,提前预警驾驶人交叉口的交通冲突是解决该问题的有效方法。如许甜等人[3]通过实车试验,评估了搭载预警系统的智能汽车对行车风险的干预效果,试验结果表明预警系统在提升驾驶人安全行车方面有积极作用;王露锦等人[4]设计了一种基于VANETs 的交叉口车辆碰撞预警系统,借助车辆与车辆之间的数据交换,完成了高精度的交通状态检测和预警发布。结合前人对预警系统的研究,本文选择通过人机交互终端(Human-Machine Interface,HMI)向驾驶人传递预警信息。在车路协同环境下,车辆可以通过智能车载设备获取道路环境的信息,然后将这些信息通过HMI呈现或告知驾驶人,能够更超前、更有效地为驾驶人提供前方道路潜在危险预警[5]。
由于人的认知有限,同时驾驶任务占用驾驶人大量的认知资源,预警信息会使驾驶人注意力分散,带来安全隐患,因此国内外学者针对预警信息设计展开了深入研究。如李霖等[6]在跟驰场景下设计了基于视觉信号提示的碰撞预警HMI,并采集碰撞次数、速度、侧向位移、即碰时间等数据用以评价HMI的有效性和用户接受度;张捷等[7]基于驾驶人眼动特性,分析不同分心任务对驾驶人视觉的关注点和分心程度,提出听觉任务比视觉任务对驾驶人眼动特性的影响小;罗晨伟[8]针对行人横穿、道路右侧非机动车汇入车道等风险场景采集了驾驶人应激反应的多个表征指标,通过主成分分析法和熵值法将驾驶人应激反应的多个表征指标变化体现于听觉预警有效性数据上,直观地描述了听觉预警对驾驶行为产生的效果;王磊等[9]研究发现适当的听觉信息刺激可使驾驶人警觉性保持在较为稳定的水平,而视觉信息刺激有助于驾驶人在特定时间段提高警觉性并察觉风险;Xu等[10]对比研究了单一视觉及听觉预警系统、梯度视觉及听觉预警系统对驾驶安全的影响,发现相比于梯度视觉及听觉预警系统,司机更倾向于单一视觉及听觉预警系统。上述学者主要从驾驶人的视觉、听觉提示等预警提示方式入手,研究预警信息对驾驶行为的影响。除了从预警提示方式出发设计预警信息外,准确的预警提示时机是提高预警信息功效性不可忽视的重要因素。如Tan 等[11]在信控交叉口横向冲突场景下研究了网联汽车不同的碰撞预警提示时机(3 s、6 s 和无预警)对驾驶人情景意识的影响,研究发现,虽然网联汽车更早地发出预警能给驾驶人带来更多的安全效益,但是驾驶人在3 s 的碰撞预警提示时机下却比6 s的碰撞预警提示时机下有着更好的情景意识,因此在设计网联车辆系统时,平衡预警提示时机对驾驶安全十分重要。如张玉婷等[12]、李国法等[13]研究发现过晚的预警提示时机降低系统的有效性,过早的预警提示时机易导致驾驶人对系统过度依赖;Yan 等[14]结合混合效应模型分析制动反应时间、预警反应时间和减速度等指标,提出预警提示时机提前4 s至4.5 s较为合适;Duan等人[15]在车道合并区内分别设置了五个不同地点的语音预警,研究发现语音预警能有效降低合并的风险,同时过晚的发布语音预警会影响预警的有效性。
驾驶人作为车辆的直接掌控者,其驾驶行为会对道路交通安全产生一定的影响[16-17],如葛兴等[18]指出驾驶人的因素是交通事故的主要影响因素,驾驶人的主要表现就是驾驶操作行为。驾驶人的操作行为因素(如方向盘转动、油门踏板、刹车踏板、横向操作稳定性、转向特征等参数)和车辆状态指标(主要包括车辆速度、加速度、车间距、车辆侧向偏移情况、方向盘调整状况等)反映了驾驶人的应急决策能力、车辆控制能力、动态感知能力、危险感知能力[19]。如郭音伽等[20]通过分析驾驶操作行为因素,能有效比较不同诱导措施、不同驾驶环境等自变量对驾驶操作行为的效果差异,因此要分析预警信息对驾驶行为的影响,探究驾驶操作和车辆运行状态指标尤为关键。同时,刑大伟[21]提出驾驶人的视觉感知特性直接关系到人-车-路闭环系统的运行状态,准确、充足的视觉感知是人-车-路闭环系统稳定运行的关键。
通过先前学者对预警信息设计的研究可见,预警信息的提示方式以及提示时机等都会影响驾驶人的驾驶行为,为此有必要更加深入地研究预警信息设计对驾驶行为的影响,使预警信息有效干预驾驶人操作决策,降低无信号交叉口横向冲突事故。在以往的研究中预警信息交互的设计多从驾驶人视觉[6-7]、听觉[9]特性等因素入手,但预警通道在听觉、视觉上的研究各自独立,缺少结合多重通道的预警信息分级分类研究,因此,本文基于VS-Design 虚拟场景设计软件和DSR-1000 TS 2.0型驾驶模拟平台,结合视觉、听觉通道对典型场景、典型冲突的预警信息做出针对性设计,搭建无信号交叉口典型横向冲突场景开展研究。首先,结合上述学者研究成果,针对无信号交叉口横向冲突设计不同预警提示类型、不同阶段预警提示时机;其次,招募30 位青年驾驶人作为试验对象,应用眼动仪、驾驶模拟平台开展驾驶模拟试验;最后,选取驾驶行为特征参数[18-19],采集驾驶人在风险场景下驾驶操作行为指标、车辆运行状态指标、眼动指标,分析预警信息对驾驶行为的影响。研究结论将为预警提示类型、预警提示时机对驾驶行为的影响提供理论依据,同时为基于HMI 的预警信息交互设计提供理论参考。
1 试验设计
1.1 试验平台搭建
主要采用的试验设备及相关软件包括:DSR-1000 TS 2.0 型驾驶模拟器、VS-Design 三维交通场景建模软件、I-View HED4 眼动仪。其中,DSR-1000 TS 2.0 型驾驶模拟系统是由昆明理工大学开发的“人-车-路-环境”驾驶模拟试验系统,如图1(a)所示;VS-Design 是由昆明理工大学交通工程学院道路交通仿真试验室自主研发的三维场景设计软件,主要提供专用的场景编辑工具,能有效编辑所需的道路虚拟场景,研究者可以在搭建好道路虚拟场景的基础上,自主控制模拟车辆、交通流量等动态参数以及交通风险参数等其他环境因素。I-View HED4 眼动仪是一款接触式眼动数据采集器,采集驾驶人动态驾驶过程下的眼动特征行为,仪器通过其自带的摄像机记录驾驶人眼动数据,输出的场景在视频中以光标显示,光标显示位置标示驾驶人的注视位置,采集到的眼动特征数据可以使用SMIBeGaze 软件导出包括注视、扫视和眨眼睛等指标,对视觉的眼动数据用于后续对驾驶事件下驾驶行为的分析处理。该驾驶模拟平台有强大的数据处理功能,可提取道路特征、车辆运行状态,驾驶行为参数(速度、加速度、方向盘转角、油门/制动踏板行程等)。

图1 试验平台Fig.1 Experimental platform
同时,本试验在已有的驾驶模拟系统基础上,新增人机交互系统HMI,如图1(b)所示。在车载显示器上安装自主开发软件,用于模拟车路协同下的人机交互终端,驾驶模拟器将试验场景中驾驶人驾驶的车辆周围的道路及其他车辆相关数据传输到主机服务器,服务器汇总后发送到HMI 并通过语音提醒和屏幕显示的方式为驾驶人提供预警功能。该系统主要实现以下功能:
(1)视觉信息合理可视化。根据具体试验场景,设计出具体某个场景下的信息呈现界面,并且通过车载显示器呈现给驾驶人,如图1(b)所示。图中区域①为预警信息警示标志,区域②为测试主车探测到交叉口横向来车的行驶速度。呈现的信息中涉及距离动态变化和不同场景下界面的变化,都需要使用计算机编程完成,对距离的动态变化也需要使用计算机校对计算。
(2)结合场景配套加入语音提示信息。根据具体的试验场景设计匹配的语音提示信息,按照要求将联网信息通过视觉、听觉形式组合完成预警信息的传递,最后通过蓝牙音箱外放语音预警信息。
1.2 试验情境设计
1.2.1 道路交通场景设计
(1)静态场景设计
试验针对无信号交叉口横向冲突预警下驾驶行为特性进行分析研究,因此试验选取了典型横向来车、行人冲突风险的无信号交叉口构建风险驾驶场景。试验针对预警的提示类型和提示时机设计了7个无信号交叉口场景,总计路段长8 km,单车道宽为3.5 m,如表1所示。

表1 试验情境及预警信息Tab.1 Experimental situation and early-warning information
(2)动态场景设计
应用VS-Design 三维场景设计软件中的动态实景设计功能实现了动态车流的设置,其中包括网联车流和非网联车流,如表1所示。通过设定触发区实现交通冲突的触发,车辆驶入触发区后,非测试主车以外的车辆和行人按照设计者设计的路线、速度等条件开始运动。
(3)交通流设计
交通量根据道路类型(双向两车道、双向四车道)的不同需要设计不同交通流。根据《城市道路设计手册》(简称《手册》)关于道路路段单向设计通行能力计算表,单向设计能力计算如表2所示。

表2 设计通行能力计算Tab.2 Design capacity calculation
在双向四车道(单向两车道)道路上,设置车速60 km/h、车间距60 m 的匀速且等距的行驶交通流。对于双向两车道部分的车流量,需要根据《手册》中关于理论通行能力和服务水平进行计算得出具体的车流量设置,《手册》关于单车道的理论通行能力如表3所示。

表3 单车道理论通行能力规范Tab.3 Theoretical capacity specification for single lanes
路段设计通行能力计算如下所示:
式中:Νa为单向道路设计通行能力,pcu/h;Ν0为一条道路理论通行能力,pcu/h;ac为机动车道道路分类系数,对于城市次干道道路取0.9;am为通行能力车道折减系数,单向一车道为取1;aa为交叉口折减系数,由于在仿真环境中交叉口处仿真车辆运行状态与路段相同,因此,不存在折减,即取1。
最终计算得出单向车道设计通行能力为1 620 pcu/h,因此,在双向两车道(单向一车道)路段设置车速40 km/h,间距30 m 的匀速、等距的行驶交通流。
1.2.2 预警提示类型设计
如表1所示,试验结合了听觉与视觉通道的预警信息呈现方式,同时为探究网联预警信息对驾驶人驾驶行为的影响,设计了如下两种预警信息提示类型。
(1)网联警告型
明确性警示预警信息,即主车在网联环境下能够明确探测到交叉口存在横向冲突,并在设定的距离向驾驶人发出预警。在车联网环境下,该类预警信息具有可快速准确辨认的特点,明确清晰地给出无信号控制交叉口中冲突对象的警示语音,同时HMI显示红色警示标志。
(2)常规提示型
非明确性提示预警信息,即无论交叉口是否存在横向冲突,预警系统都会在设定的位置提示驾驶人注意车辆或行人。在非车联网环境下,该类预警信息具有“柔和”且对驾驶人不产生干扰的特点,在车辆即将进入无信号控制交叉口时,仅给出注意车辆或行人的提示,同时HMI 显示黄色提示标志。
1.2.3 预警提示时机设计
不同的预警信息发布时机对驾驶行为的影响有显著性差异[12]。因此,应慎重考虑何时何地向驾驶人发布预警信息,即Dx点的确定方法。Dx的设置原则是保证驾驶人有足够的反应时间,由于预警信息较为详细,所以选择尽可能早的时间发布预警。相关学者研究发现[22],当预警发布提前时间Tw(Warning timing)从4.0 s 增加到5.5 s 时,车辆碰撞率显著降低,并指出5.5 s是最优预警时间方案。同时在确定预警发布时机时,应考虑驾驶人的反应时间和为驾驶人保留的避险决策有效时间。根据相关学者研究[14]驾驶人反应时间T(rReaction time)设定为2.5 s。发布预警位置计算公式如下式所示:
式中:Dx为发布预警时车辆距离交叉口的位置;Tr为反应时间,Tr=2.5 s;V0为行驶车速;Tw为预警发布提前时间,Tw=5.5 s。
为确保预警提示时机的有效设置,V0取最低限制车速40 km/h,计算得出Dx=8 8 m,并上下取值为50 m、90 m、110 m,如图2 所示(分别为场景2、6、7)。试验分别在距离交叉口50 m、90 m、110 m(晚、中、早的提示时机)处设置预警触发区,测试主车驶入触发区并触发预警,定义测试主车驶入触发区的时刻为预警提示时刻。

图2 试验场景布局示意图Fig.2 Schematic diagram of experimental scene layout
1.3 试验过程
试验共招募了30 名被试,平均年龄30 岁、驾龄7 年,试验对象驾龄及年龄描述性统计如表4 所示,被试者具体信息如表5所示。所有被试双眼视力(包含矫正视力)均在5.0 以上,且在试验过程中状态良好,可以独立安全驾驶车辆。
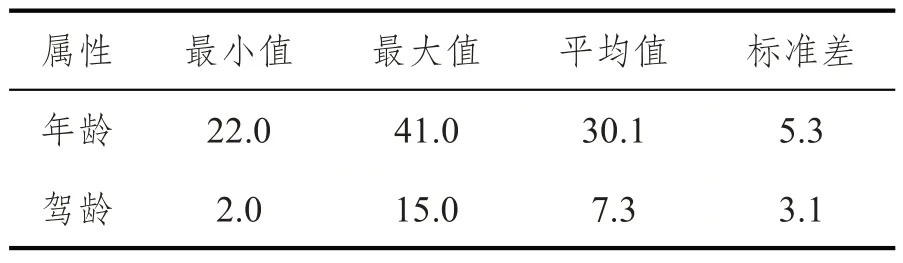
表4 试验对象驾龄及年龄描述性统计分析Tab.4 Descriptive statistical analysis of driving age and age of subjects

表5 试验对象信息Tab.5 Test subject information
试验在昆明理工大学交通工程学院道路交通仿真实验室进行,具体实验流程如下:
(1)试验开始前被试者填写基本信息问卷,包括年龄、性别、职业、驾龄等基础信息。
(2)工作人员向被试者讲解驾驶模拟器的操作方法与注意事项,并让被试者在预实验场景试驾5 min,预试验场景为城市道路平交口场景,当被试者熟悉相关操作后再进行下一环节,以保证正式试验数据的有效性。
(3)工作人员告知被试者试验规则,并要求被试者按照正常习惯驾驶,实验中需遵守交通规则,行驶速度不超过60 km/h,如突发状况请立即制动以保证安全。
(4)工作人员指导被试者佩戴眼动仪并进行眼动仪校准,使眼动数据误差在合理的范围内,校准完成后开始试验。
(5)开始正式试验,被试者按照试验场景中指示完成场景总行驶路程。
(6)试验结束后被试者填写意向问卷,工作人员确认试验数据收集无遗漏,向被试者结算试验报酬。
试验全程用时40 min,总驾驶时长平均12 min,在被试者驾驶过程中HMI 会显示前方道路一定距离以内的交通指示标志、道路中联网车辆和行人的预处理信息,并会通过语音进行提示,同时要求被试遵守场景中的交通规则,在遇到危险情况时,根据自身驾驶习惯采取避险操作。试验过程中实时采集记录被试者的眼动数据、驾驶操作行为数据及车辆运行数据,并及时对异常数据和突发情况进行合理化改善。
2 试验数据分析
利用DataRecord 软件实时记录收集驾驶人操作数据和车辆运行参数,包括车速、加速度、车辆实时轨迹、制动踏板踩踏深度等参数,随后利用python将导出的数据进行清洗,具体包括对重复数据、错误数据、矛盾数据、缺失数据等的删除、修正与补充。再利用SPSS Statistics 软件对数据的均值、极值、方差等指标加以分析。
2.1 眼动特性分析
通过对驾驶人行驶过程中眼动数据分析,探究常规提示型与网联警告型预警对驾驶人在行驶中的专注度、处理交通环境信息能力的影响。郭凤香等人[23]对驾驶人在交叉口行驶时的注视区域进行了动态聚类划分,将试验采集到的视线点坐标投影到与行车方向垂直的平面上,并将驾驶人注视点聚类后投影到驾驶人视野平面上,根据驾驶模拟器的结构特点及驾驶人注视聚类的情况,将驾驶人的视野平面划分为1~5 这5 个区域,如图3 所示。本文参考该种方法,选取区域3——道路中心区为主要分析的注视区域。

图3 注视区域划分Fig.3 Result of gaze area division
试验统计了预警触发后10 s 内驾驶人的注视频率、注视时长、平均扫视幅度、平均扫视速度。驾驶人对车辆前方道路的注视频率可以反应驾驶人对前方道路的专注度,由图4(a)可知,网联警告型预警干预下驾驶人对道路中心区的注视频率平均为22 次/min,常规提示型预警干预下驾驶人对道路中心区的注视频率平均为78 次/min,常规提示型预警使驾驶人对道路中心的注视频率上升,使驾驶人更专注于车辆前方道路的观察,且提升强度相对较大。驾驶人对车辆前方道路的注视时长在一定程度上反映了驾驶人处理交通环境信息的能力,且注视时长与交通环境信息的获取难度呈正相关关系[24]。由图4(b)可知,网联警告型预警大幅度降低了驾驶人对道路中心区注视时长,表明网联警告型预警降低了交通环境信息的获取难度,提高了驾驶人处理交通环境信息的能力,面对突发风险时缩短了驾驶人的认知和判断时间,在车辆行驶速度相同的情况下减小了驾驶人所需的安全停车距离,降低了交通事故发生的可能性。由图4(c)可知,相较于常规提示型预警,驾驶人的扫视幅度在网联警告型预警下小幅度增大,表明网联警告型预警能提高驾驶人获取交通信息的及时性与有效性。但整体而言,扫视指标的变化趋势相对于注视指标而言较平缓,变化趋势相对不明显,如图4(d)所示。

图4 预警信息提示类型对眼动行为特性的影响Fig.4 Influence of the type of early warning information on the characteristics of eye movement behavior
为确保预警提示时机的有效设置,如1.2.3 所述,分别在距离交叉口偏晚(场景2)、适中(场景6)、偏早(场景7)处设置预警触发区,并且预警提示类型均为网联警告型。测试主车驶入触发区并触发预警,定义测试主车驶入触发区的时刻为预警信息提示时刻。如表6 所示,对比偏晚(场景2)与适中(场景6)的预警提示时机,驾驶人的道路中心区注视时长随着预警提示时机的提前而大幅度增长,表明场景6中预警提示时机能使驾驶人对车辆前方道路更加专注,驾驶人更能提前获取行驶环境信息,及时处理前方道路风险冲突。而当预警提示时机提前至偏早(场景7)时,驾驶人对道路中心区的注视时长小幅度下降至7 284 ms,驾驶人的部分注意力转移到了车载显示器上,表明过早的预警提示时机会降低驾驶人对预警的信任度,使驾驶人视线在道路中心区和车载显示器之间来回切换,分散其注意力,导致预警提示功效降低。

表6 注视时长统计Tab.6 Gaze length statistics
2.2 车速特性分析
试验采集了30位驾驶人在预警信息触发前后10 s 内车速变化的情况,如图5 所示。图5(a)、(b)中每条折线都代表一位驾驶人在常规提示型、网联警告型预警干预下的车速随时间变化情况,由图中线条变化趋势可以得出在常规提示型、网联警告型预警的干预下分别有16 位驾驶人在第15 s停车避让冲突、12 位驾驶人在第14 s 停车避让冲突。表明网联警告型预警信息在一定程度上缩短了驾驶人的停车时间,使驾驶人能提前1 s 停车避让横向来车冲突。然而,周振宇等[25]研究指出车辆制动减速或启动加速时,纵向加速度对驾驶舒适性有较大影响,当纵向加(减)速度的绝对值<0.8 m/s2时驾驶人处于舒适状态;当纵向加(减)速度的绝对值为0.8~3.4 m/s2时驾驶人处于比较舒适状态;当纵向加(减)速度的绝对值>3.4 m/s2时,人体感受强烈,属于不舒适状态。由图6 可知,场景2 由于驾驶人制动时间的减短导致减速度增大至-4 m/s2以上,因此网联警型预警在一定程度上降低了驾驶人的行车舒适性。

图5 预警信息提示类型和提示时机对车速行为特性的影响Fig.5 Influence of the type and timing of early warning information on the behavior characteristics of vehicle speed

图6 不同场景中驾驶人的平均行车加速度时变图Fig.6 Time-variant diagrams of the average driving acceleration of drivers in different scenarios
为研究预警信息提示时机对驾驶人车速行为的影响,试验分别采集了预警信息提示时机在距离交叉口偏晚(场景2)、适中(场景6)、偏早(场景7)时,30 位驾驶人触发预警信息前后10 s 内车速随时间变化的情况。如图5(b)、(c)、(d)所示,提示时机设置位置分别为50 m、90 m、110 m,同时三个场景设置了相同的车联网环境、平交口冲突点,且预警信息提示类型均为网联警告型,以便探究预警信息恰当的提示时机。如图6所示,根据前文分析预警信息触发区设置在50 m(场景2)时,减速过程较短导致减速度增大至-4 m/s2以上,使驾驶舒适度降低;预警信息触发区设置在90 m(场景7)时,驾驶人行车速度较为平缓,减速过程较长使减速度保持在0.8~3.4 m/s2范围内,表明驾驶人的舒适性较好。
2.3 制动行为分析
制动踏板速率(Vbrake)是指测试车辆本次制动过程中,制动踏板深度最大值与制动至最大制动踏板深度时间的比值[26]。图7 所示为不同预警提示类型下的驾驶人踩踏板速率的均值,相较于提示型预警,警告型预警使Vbrake增大。表明驾驶人对警告型预警更加敏感,但踩制动踏板速率增大,剧烈强度增加使驾驶人制动舒适性降低。如表7所示,ANOVA 分析结果表明,两种预警提示类型(F=4.181,Ρ<0.05)对Vbrake的影响是显著的。

表7 不同预警提示类型下制动踏板速率方差分析Tab.7 ANOVA results of brake pedal speed under different warning types

图7 不同预警信息提示类型下制动踏板速率均值分布Fig.7 Mean distribution of brake pedal speed under different warning information types
制动时间是指从驾驶人开始采取紧急制动行为到结束制动行为的时间。考虑到预警提示时机影响因素,对驾驶人的制动时间进行统计性描述并进行了方差分析,如表8、表9 所示。由表9 可知,不同的预警提示时机对驾驶人的紧急制动时间的影响有显著差异性(Ρ<0.05)。
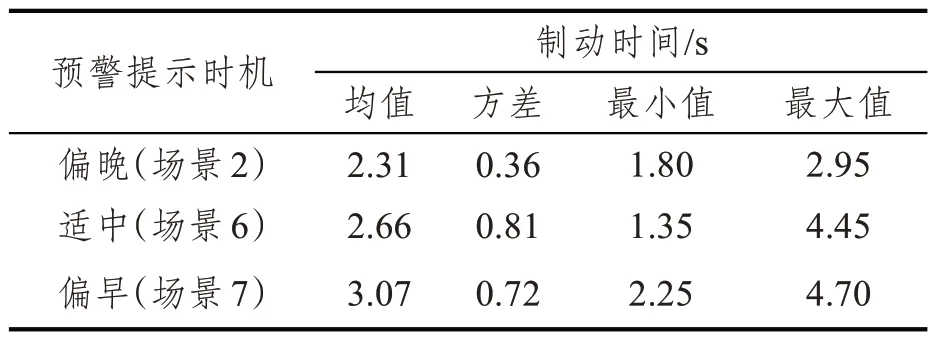
表8 制动时间描述性统计分析Tab.8 Basic description for braking time

表9 不同预警提示时机的制动时间方差分析Tab.9 ANOVA results of braking time under different warning time
图8 为不同预警提示时机下的驾驶人制动时间均值,随着预警提示时机的提早,驾驶人的制动时间呈现递增趋势,即预警提示时机越早,驾驶人踩制动踏板的时间越长。预警的提前使得驾驶人更早注意到冲突车辆,有足够的时间采取减速制动行为,即在进行避险行为时,踩制动踏板的时间延长,刹车剧烈程度会降低,提高驾驶人的制动舒适性。

图8 制动时间随预警信息提示时机的变化情况Fig.8 The change in braking time with the timing of early warning information
3 结论
研究通过三维场景设计软件VSDesign建立无信号交叉口典型横向冲突场景,利用驾驶模拟器采集模拟驾驶数据,并基于车载显示器与模拟器互联组成的车路协同系统,分析了具有预警功能的车路协同系统HMI对驾驶行为的影响规律和程度,得出如下结论:
(1)通过驾驶人的眼动特性数据,分析得出HMI 的设置使驾驶人对车辆前方道路中心区的视觉注意集中,同时也降低了驾驶人对交通环境信息的获取难度,提高了驾驶人处理交通环境信息的能力。
(2)网联警告型预警能有效使驾驶人提前停车避让横向冲突。同时该预警使驾驶人踩制动踏板的速率增大,表明驾驶人对该预警更加敏感,行车安全性提高,但减速度增大,行车舒适性降低。
(3)预警提示时机对HMI 预警系统的功效性和驾驶行为的影响显著。预警提示时机过晚将失去意义,使驾驶人仓促采取紧急制动,不利于行车安全也降低了行车舒适性;而过早的预警提示时机会降低驾驶人对预警的信任度。通过对预警提示时机于偏晚、适中、偏早(50 m、90 m、110 m)时驾驶人眼动特性、车速特性和制动行为数据的分析,结果表明,预警信息提示位置宜设置在距离交叉口50~90 m之间。
本研究针对预警类型与预警时机两个方面,分析了基于HMI 的预警信息对驾驶行为的影响,研究成果可为HMI提供预警设计建议。未来的研究可扩展被试者群体,例如针对年龄、性别、驾龄、学历等群体特征,进一步研究基于HMI 的预警系统对不同群体驾驶人的影响。
