飞机舱门收放系统CPSO-BP神经网络故障仿真与诊断
2023-12-12娄华语王良模
王 强,吴 伟,刘 东,娄华语,王良模
(1.航空工业沈阳飞机设计研究所, 沈阳 110000;2.南京理工大学 机械工程学院, 南京 210014)
0 引言
舱门是民机的运动功能部件,其功能、寿命、安全性、维修性和可靠性对民机安全有直接影响[1]。因此,针对飞机舱门收放系统的故障诊断十分重要。目前,对飞机液压系统的故障检测工作主要依靠实验平台进行实物实验。但是,单纯依靠实验获取故障数据集存在工作繁琐、数据量不足等问题。因此,大量研究人员采用仿真方法对液压系统进行故障研究。王明锦等[2]结合 AMESim+Simulink平台,仿真分析了阀控马达液压系统控制效果与工作特性。Liu[3]分析了民机主起落架舱门伸缩原理和故障原因,并深入研究了上位锁(Uplock)的控制过程和逻辑。Zhu等[4]基于AMESim和LMSlian对飞机舱门锁机构进行联合建模仿真,并通过向模型中注入故障信息为故障诊断和分析提供了一种获取故障数据的方法。
在故障诊断方法研究方面,储瑄等[5]采用故障树系统分析理论对飞机某舱门收放系统进行诊断分析,并进行了可靠性试验。近年来,机器学习和神经网络逐渐发展成系统故障诊断的主流方向。王帅星等[6]在建模基础上通过故障注入获取内泄漏故障数据,并采用粒子群(PSO)优化BP神经网络进行故障诊断研究。Liu等[7]利用变分模式分解(VMD)、多重分形去趋势波动分析(MFDFA)和概率神经网络(PNN)对机舱门执行机构进行故障诊断,有效解决了由非线性和非平稳执行机构振动信号引起的故障诊断困难。Cui等[8]在DBN模型的结构基础上,提出利用SSA算法对优化DBN模型隐藏层的节点数量,并建立SSA-DBN网络模型用于飞机舱门液压系统的故障诊断。Yang等[9]在飞机舱门执行机构故障诊断方面,采用稀疏自动编码器(SAE)算法避免简单的直接筛选过程,采用双向长短期内存RNN算法(BiLSTM-RNN)应用于故障诊断,减少了传感器数量。
综上,民机舱门收放系统故障模拟存在故障数据少、故障诊断精度低的问题,因此,提出基于CPSO-BP神经网络的飞机舱门收放系统故障诊断模型。首先,根据飞机舱门系统工作特性及高发故障,分析确定系统典型故障模式;其次,建立飞机舱门收放系统仿真模型,通过典型故障的仿真分析获取故障数据集;最后,分别采用BP神经网络、混沌粒子群算法优化BP神经网络进行故障诊断。
1 飞机舱门收放系统典型故障模式
1.1 飞机舱门收放系统组成
飞机舱门收放系统驱动方式主要分直线式和旋转式。由于旋转式驱动方式占用空间小、舱门开闭时间短,已成为先进飞机的首选方案。
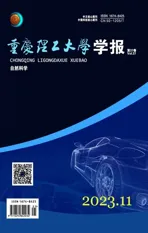
图1所示的旋转式飞机舱门收放系统采用阀控液压马达驱动飞机舱门完成开闭运动。液压油从液压源出发经过电液比例阀,经由流量控制阀驱动控制液压马达旋转,最后经减速器实现舱门开闭。控制时采用经典PID控制。
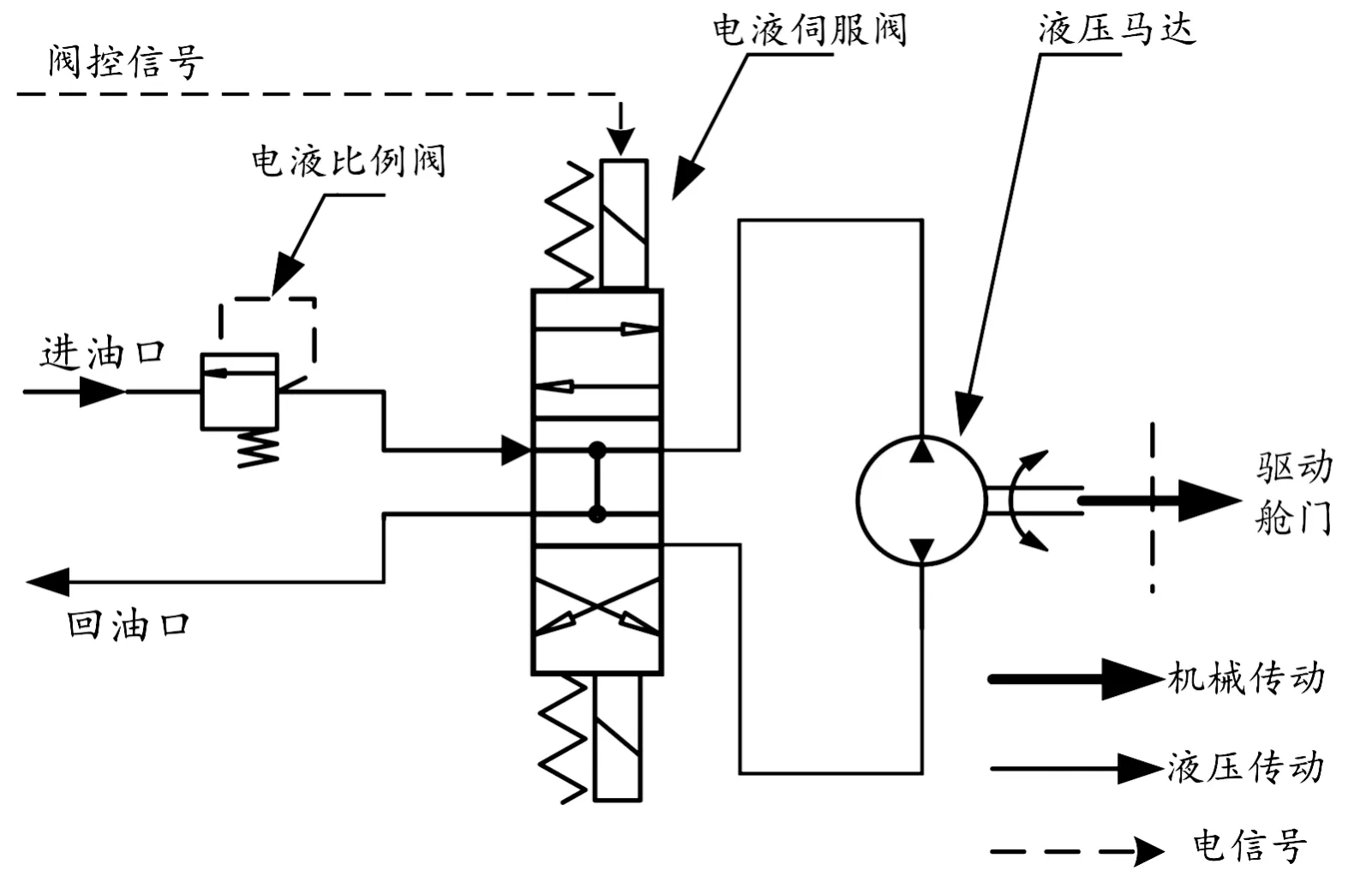
图1 旋转式飞机舱门收放系统原理示意图
1.2 典型故障模式
飞机舱门收放系统正常开闭时,通过外场统计舱门收放系统故障现象主要为舱门不动作、舱门动作不到位和舱门动作缓慢。根据外场高发故障及飞机舱门系统工作特性,确定4类典型故障模式:
1) 液压马达外泄漏:液压马达随着使用时间的增加,管嘴保护圈容易从管嘴端面与壳体端面间隙中挤出,出现外部油液渗漏现象[10-11]。随着泄漏量增大,导致液压马达进出口两端压差降低,进而导致舱门动作缓慢甚至动作不到位。
2) 液压油污染:液压油混入空气后,其弹性系数降低,变得更易被压缩,会导致作动元件出现爬行现象等问题,造成的故障占液压系统故障的75%以上[12]。
3) 节流阀阻塞:固体颗粒污染液压油最常见且危害最严重,主要包括硬质颗粒和软质颗粒2种污染物。这些物质极易堵塞如节流阀等元件的阀口,造成元件的阀口流通面积减小,对系统产生负面影响。
4) 流量控制阀阀芯磨损:流量控制阀是阀控系统控制信号直接作用元件,频繁变化阀口开度会导致阀芯与阀体产生磨损,液压油液污染物更是加剧了这一现象[13],造成流量控制阀内泄漏故障,降低控制效果。
2 飞机舱门收放系统故障模拟
2.1 仿真模型的建立
依照舱门收放系统结构,在AMESim中选取相应元器件,建立旋转式飞机舱门驱动系统仿真模型如图2所示。系统采用阀控液压马达驱动舱门运动,控制中采用位置PID和速度PID相结合的方法,通过位置闭环和速度闭环保证到位精度和舱门运行速度控制效果。为简化结构将部分控制信号用超级元件“MOVE_SPEED”、“TIP_SPEED”、“OPEN_DECELERATION_ ANGLE”、“CLOSE_DECELERATION_ANGLE”及“LOCATION”代替。
2.2 位移和速度仿真
设置各部件相关参数,仿真时间为5 s,时间间隔为0.01 s。运行舱门模型,结束后查看系统中的各种参数。飞机舱门的位移和速度曲线如图3所示。
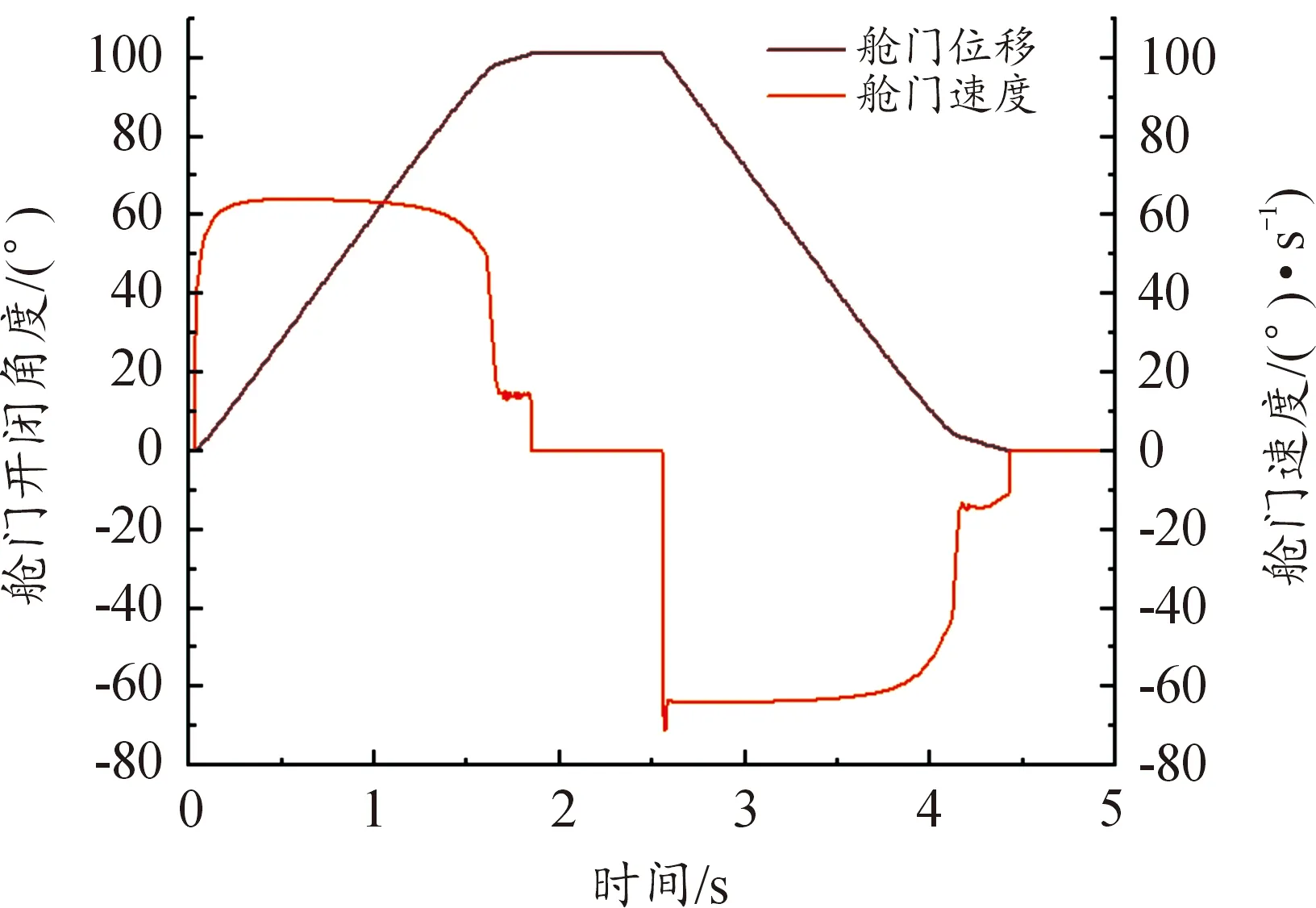
图3 舱门位移和速度曲线
从图3中可以看出,飞机舱门收放系统在仿真周期内完成了打开和关闭两阶段动作,所用时间分别为1.84 s和1.87 s,低于设计许用要求的2 s;且舱门在开闭末端有明显减速动作,末端速度保持在15(°)/s以内,满足系统设计要求。即搭建的舱门收放系统模型可用。
2.3 故障注入
如图2所示,根据飞机舱门收放系统工作特性及典型故障,进行故障注入:① 液压马达进出口两端并联节流阀(见图中1处),并调节等效孔径大小实现故障模拟;② 修改液压油空气含量参数实现液压油污染故障注入(见图中2处);③ 修改节流阀等效孔径实现节流阀阻塞故障注入(见图中3处);④ 流量控制阀进出口两端并联节流阀(见图中4处),实现流量控制阀阀芯磨损故障注入。
2.4 故障数据集构建
基于建立的飞机舱门收放系统故障仿真模型,进行飞机舱门收放系统正常工作及液压马达泄漏、液压油污染、节流阀阻塞和流量控制阀磨损等典型故障的仿真分析。飞机舱门收放系统仿真参数见表1所示,在正常值和故障值区间内分别等距取10个和20个数值,其他参数取正常值,每种故障分别进行30次仿真,共获取120组仿真数据。原始数据存在重复等问题,故需要对原始数据进行预处理:对重复数据手动进行直接删除。

表1 飞机舱门收放系统仿真参数
设置仿真时间为5 s,采样频率为100 Hz,提取A点流量和压力信号、B点位置信号形成一组故障信号,每组信号共3×500个数据点。从正常值和故障值区间随机各抽取一组数据构成测试集,其余构成训练集。
图4所示为不同状态下的流量、压力和位移变化曲线。相比于正常工况,随着系统的故障注入,舱门到位速度变慢,系统消耗流量增加,系统压力降低。此外,压力、流量和舱门位移在不同故障模式下变化。因此,如果系统中的锁定机构发生故障,可以通过系统的工作压力、流量和位移信号来推断故障原因。

图4 飞机舱门收放系统故障仿真结果
为解决故障数据较少稳态,在仿真获取故障数据的基础上,采用滑动窗口方法对故障信号进行重叠采样[14-15]。为保持重构信号原有信号的特征,考虑舱门开闭最长时间为2.5 s,设置窗口长度为256,步长为1。经滑动窗口重叠采样后,每组故障数据可获得245个样本,随后按4∶1划分训练集和测试集。
采集压力、流量、速度和位移多种传感器信号组成故障信号,在数据增强基础上,采用横向拼接的时序信号特征融合[16]方法,将原有格式为3×256的样本数据重构为长度为768的一维信号样本。横向拼接特征融合原理如图5所示。横向拼接是将特征直接进行拼接,将其从头到尾串接起来,虽然这样会增加模型的运算量和运算时间,但能保留最完备的信息,不会造成信息的损失。
对数据进行抽稀与归一化操作。最终建立故障数据集,包含测试集样本5 880个,训练集样本23 535个,每个样本格式为长度256、数据分布在[0,1]间的一维信号。
3 飞机舱门收放系统故障诊断
3.1 BP神经网络故障诊断
BP神经网络是一种按误差逆向传播数据训练的多层前馈网络,目前其相关应用最为广泛。将飞机舱门收放系统故障数据集作为神经网络输入,电磁阀磨损、液压马达外泄漏、液压油混入空气和节流阀阻塞作为输出,建立神经网络。该BP神经网络为三层典型网络结构,含1个隐层,隐层神经元个数设置为8,最大训练次数1 000,学习率为0.01,目标为训练均方差1×10-6。进行5次诊断,最终的故障诊断结果如表2所示。可以看出:使用传统BP神经网络进行故障诊断时,平均诊断正确率可达85.36%,多次诊断结果的鲁棒性较强,但诊断结果仍不太理想。

表2 BP神经网络综合故障诊断结果
3.2 混沌粒子群算法(CPSO)优化BP神经网络
BP神经网络综合故障诊断结果不太理想的原因是网络训练时BP网络中的初始权重和阈值为随机选取产生,容易出现局部收敛极小点,会降低拟合效果,故需要对神经网络初始权重和阈值进行优化。本文选取混沌粒子群算法(CPSO)优化BP神经网络。
3.2.1混沌粒子群(CPSO)优化算法
粒子群优化算法是一种采用速度-位置搜索模型的群体智能寻优算法,具有编码简单、收敛速度快的特点[17]。粒子群算法中更新粒子位置和速度的公式如下:
vid=wvid+c1r1(piBest-xid)+
c2r2(pgBest-xid)
(1)
xid=xid+vid
(2)
其中:xid表示为粒子位置;vid表示粒子速度;w为惯性权重;c1和c2为学习因子;r1和r2为[0,1]间的随机数;piBest和pgBest分别为个体极值和群体极值。
基本粒子群算法寻优搜索过程有2个不足:① 随机初始化和进化过程使得个体极值和群体极值的更新有一定盲目性,影响收敛速度;② 利用式(1)和式(2)更新粒子位置,本质是采用正向反馈方式,通过当前粒子信息、个体极值和群体极值3个信息获取下一步迭代位置,容易陷入局部最优解。
针对粒子群优化算法的不足,提出基于混沌优化思想的混沌粒子群优化(CPSO)算法优化BP神经网络。一般将混沌定义为由确定性方程得到且具有随机性运动的运动状态。混沌动力学中比较典型的混沌模型是Logistic映射[18],其表达式为
zn+1=μzn(1+zn)
(3)
式中:μ为控制参数,一般取值为4。
针对粒子群算法后期收敛速度慢、易陷入局部最优点而出现早熟的问题,通过粒子群的方差来判断是否早熟,方差表达式为
(4)
式中:Fi为粒子的适应度;Favg为粒子的平均适应度。
当方差小于给定值时判定粒子进入早熟状态,此时需要重新设定粒子速度和位置以跳出局部最优。
采用混沌理论改进粒子群算法优化BP神经网络故障诊断流程见图6。
3.2.2故障诊断结果的对比分析
为验证CPSO算法优化BP神经网络的故障诊断性能,基于已建立的故障数据集,分别采用CPSO-BP和BP两种不同方法对比进行故障诊断。CPSO算法种群大小设置为20,迭代寻优100次,其他初始化超参数如表3所示。
图6 CPSO-BP神经网络流程

表3 CPSO算法超参数
图7所示为CPSO算法寻优适应度进化曲线。分析可知,CPSO-BP算法在迭代寻优44次后,适应度不再减小,即寻优获取到最优目标值。

图7 CPSO-BP适应度进化曲线
各神经网络对测试集故障诊断结果的混淆矩阵元素如图8所示。其中0—4分别代表正常工况、液压马达泄漏、液压油污染、节流阀阻塞及流量控制阀磨损五类情况。可以清楚得出:相比BP神经网络,CPSO-BP神经网络针对液压马达泄漏、液压油污染、节流阀及流量控制阀磨损四类故障的诊断正确率均有明显提升,其中液压油污染和流量控制阀磨损两类故障诊断的正确率分别提高了27%和34%。
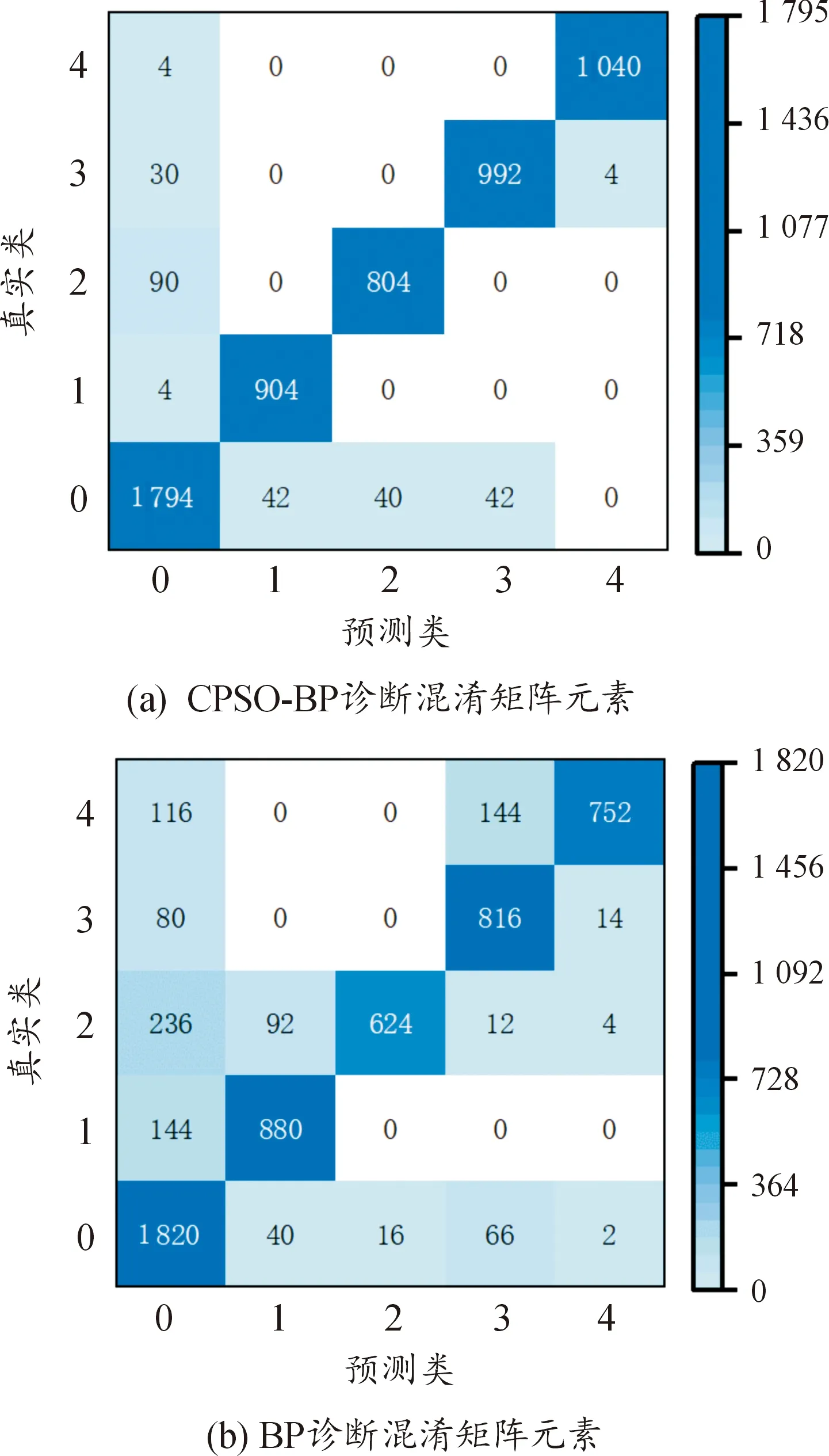
图8 测试集故障诊断混淆矩阵元素示意图
此外,在CPSO-BP算法基础上,研究神经网络隐含层节点个数对CPSO-BP及BP诊断结果的影响。随着网络节点个数的增加,故障诊断模型的诊断精度和诊断时间如图9所示。可知优化后,8节点时,CPSO-BP诊断精度较其他节点更高,正确率达到93%,且诊断时间相比7、9和10节点更低,综合计算效率更高。
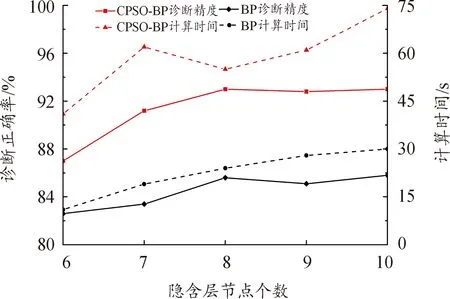
图9 不同节点故障诊断正确率与计算时间
4 结论
1) 基于AMESim搭建飞机舱门收放系统故障模型以代替实际设备进行故障诊断研究,弥补了阀控液压马达驱动舱门系统建模研究较少的不足,具有仿真精度高、故障数据采集方便和数据量丰富等优点;
2) 采用滑动窗口方式进行故障数据增强,极大丰富了故障数据集,多传感数据横向拼接的特征融合方式提高了神经网络训练与诊断精度;
3) 采用BP神经网络进行故障初步诊断的平均诊断正确率仅为85.37%。为提升诊断正确率,采用混沌粒子群算法(CPSO)优化BP神经网络的初始权重和阈值,CPSO-BP神经网络的系统故障诊断正确率可以达到93%,提高了液压油污染和流量控制阀磨损两类故障的诊断正确率,能较准确识别故障类型,可用于飞机舱门系统故障诊断。