固定翼无人机编队飞行可视化仿真方法研究
2023-12-09谢文雅徐庶于鹏飞王忠方宜武田琪陈飞黄晓巍
谢文雅,徐庶,于鹏飞,王忠,方宜武,田琪,陈飞,黄晓巍
(中国电子科技南湖研究院,浙江嘉兴 314002)
0 引言
3架及以上无人机编队飞行共同完成特定任务,相对单个无人机具有可靠性强、解决问题能力强的特点。多年以来已有大量文献对无人机编队飞行的控制算法进行了大量深入的研究,也有部分文献对编队飞行可视化仿真方法进行了一定的探索。
文献[1]采用PID控制和遗传算法对固定翼无人机编队飞行控制进行了数值仿真与研究;文献[2]针对无人机编队飞行利用基于X-Plane的硬件在环设计了一套无人机编队飞行快速试验系统;文献[3]为了缩小编队飞行理论研究与实际应用的差距,设计了一种智能仿真系统;文献[4]利用MilkShape 3D构造无人机模型,然后将模型加载到场景中,设计了一种编队飞行仿真平台;文献[5]、[6]利用3D可视化工具Unity对旋翼无人机编队飞行进行了可视化仿真与研究;文献[7]、[8]利用FlightGear对小型固定翼无人机进行了可视化飞行仿真。
根据文献调研情况,目前对固定翼无人机编队飞行控制算法的理论研究较多,但可用于编队飞行控制算法仿真验证的方法较少,目前仍在探索如何提供一种快捷、可靠、直观的仿真方法,从而帮助编队飞行算法的快速验证与迭代。
有少量文献探索使用Unity或FlightGear对无人机编队飞行进行可视化仿真,能够一定程度上实现可视化渲染效果,但这两个工具相对虚幻引擎的渲染效果与逼真度相对较差,且需设置的参数较多,不利于控制算法的快速验证与迭代。很少有文献采用SIMULINK和虚幻引擎对固定翼无人机编队飞行进行可视化仿真。本文提出的基于SIMULINK和虚幻引擎的固定翼无人机可视化编队飞行仿真与验证方法,能够快捷、可靠、直观地用于固定翼无人机编队飞行算法的仿真与验证工作,有助于编队飞行算法的快速设计与验证迭代,具有一定的先进性和创新性,对相关研究工作具有一定的借鉴意义。
1 编队飞行设计
本文采用SIMULINK中UAV Toolbox工具箱作为底层功能模块。该工具箱包含的Guidance Model模块,集成了无人机模型和自动驾驶仪模型,形成了小型固定翼无人机闭环引导系统。Guidance Model模块的模块图如图1所示。

图1 Guidance Model模块图
Guidance Model模块有两个输入和一个输出。输入分别为引导控制量Control和飞机环境量Environment,输出为飞机的飞行状态量State。其中,输入量Control为包含目标高度、目标空速和目标滚转角三个控制指令的控制总线输入量,用于引导和控制飞机完成水平和垂直方向的飞行任务;输入量Environment为包含北向风速、东向风速、地向风速和重力加速度4个量的飞行环境控制量,用于设定飞机飞行环境中的风速和重力因素,模拟对飞机飞行的影响;输出量State为包含8个飞行状态量的总线输出量,8个飞行状态分别为北向位置、东向位置、高于地面的飞行高度、空速、航向角、飞行路径角、滚转角和滚转角速率。在地面坐标系下,无人机的各状态量计算公式为:
式中:xe、ye和h分别为无人机在地面坐标系的位置和高度,χ、γ和φ分别为无人机的航向角、飞行路径角和滚转角,Va和Vg分别为无人机的空速和地速,上标c表示目标指令command。
本文采用3架无人机组成编队飞行机群,其中一架无人机为长机,两架为僚机。编队飞行过程中僚机跟随长机,保持队形飞行,并完成队形变换任务。队形图如图2所示。
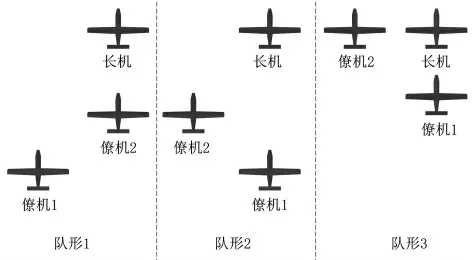
图2 无人机编队飞行队形图
编队飞行开始,无人机群保持队形1飞行;然后由队形1变换为队形2飞行,僚机1向右滚转,僚机2向左滚转,到达队形2的指定位置;最后无人机群由队形2变换为队形3,僚机1缩短和长机的距离,保持紧凑队形,同时飞行高度调整至高于长机,无人机2则和长机保持平行飞行,同时飞行高度由高于长机飞至低于长机。
为实现上述队形,需要设计纵向控制指令、侧向控制指令和法向控制指令。
纵向控制指令为目标空速,根据PID控制原理,目标空速计算为
式中:kp、ki、kd和kf分别为比例增益、积分增益、微分增益和前馈增益,xerr为位置误差,Vzj为长机的空速状态量。
侧向控制指令为目标滚转角,根据串级PID,计算过程如下。
首先计算目标侧向空速:
其次由侧速偏差计算目标侧加速度:
最后计算目标滚转角:
法向控制指令为目标高度,因此直接根据长机高度状态量和期望队形,计算得到僚机目标高度值,作为僚机的法向控制指令。
2 可视化仿真设计
采用UAV Toolbox 工具箱的Simulation 3D UAV Vehicle模块实时仿真固定翼无人机的飞行状态,该模块会根据其两个输入端变量Translation和Rotation所代表的位置向量和姿态角向量,模拟出一个无人机,并把模拟的无人机放置到3D可视化环境中。该模块的模块图如图3所示。

图3 Simulation 3D UAV Vehicle模块图
采用UAV Toolbox工具箱的Simulation 3D Scene Configuration模块来生成可视化场景。该模块的功能是实现一个3D仿真环境。该模块的模块图如图4所示。

图4 Simulation 3D Scene Configuration模块图
Simulation 3D Scene Configuration模块的场景来源可以有3种:默认场景、虚幻可执行文件和虚幻编辑器。本文使用默认的US city block场景。
3 仿真模型搭建
搭建编队飞行长机的可视化仿真模型(如图5)。

图5 长机可视化仿真模型
僚机模型和长机模型类似,只需按数学模型搭建控制指令即可,此处仅给出僚机1的侧向控制指令仿真模型如图6所示。

图6 僚机1侧向控制指令仿真模型
其中输入1为长机位置的East分量,输入2为僚机1位置的East分量,输出1位僚机1的目标滚转角控制指令。
4 仿真结果与分析
以僚机1为可视化场景视角,队形1的可视化仿真结果如图7所示。由图7可以看到位于僚机1右前方的长机和僚机2。

图7 编队飞行队形1仿真图
图8所示为无人机编队由队形1变换到队形2的过渡状态,僚机1向右滚转,僚机2向左滚转。

图8 队形1变换为队形2的过渡状态
图9所示为队形2的可视化仿真结果。由图9可以看到位于僚机1正前方长机和位于僚机1左前方的僚机2。

图9 编队飞行队形2仿真图
图10所示为无人机编队由队形2变换到队形3的过渡状态,僚机1开始爬升,僚机2开始下降。

图10 队形2变换为队形3的过渡状态
图11所示为队形3的可视化仿真结果。

图11 编队飞行队形3仿真图
由图11可以看到位于僚机1正前方的长机,且二者距离相对队形2较小。僚机2位于僚机1的左前方,且二者距离相对队形2较小。同时僚机1 的高度最高,僚机2的高度最低。
以上各图展示了固定翼无人机编队飞行的可视化场景,可以真实而直观地将编队飞行算法渲染出来,有助于更好地设计与验证编队飞行算法。
编队飞行可视化仿真的定量数据结果如图12所示。

图12 编队飞行定量仿真数据
由图12可知,僚机1在10 s内完成了由队形1到队形2的变换,变换过程平滑无超调无误差,无人机具有良好的侧向位置响应特性;且当前侧速和目标侧速变化曲线贴合度较高,无人机具有良好的侧速响应特性。僚机1在10 s内完成了由队形2到队形3的变换,变换过程平滑无超调无误差,无人机具有良好的纵向位置响应特性;且当前空速和目标空速变化曲线贴合度较高,无人机具有良好的空速响应特性。
5 结论
通过场景分析和数据分析,验证了本文提出的基于SIMULINK和虚幻引擎的固定翼无人机可视化编队飞行仿真与验证方法,能够快捷、可靠、直观地用于固定翼无人机编队飞行算法的仿真与验证工作,有助于编队飞行算法的快速设计与验证迭代,具有一定的先进性和创新性,对相关研究工作具有一定的借鉴意义。
