自适应起落架多传感器协同控制系统
2023-12-08金映丽刘雨时
金映丽, 刘雨时, 闫 明, 王 鹏
(沈阳工业大学 辽宁省冲击防护与损伤评估技术工程研究中心, 辽宁 沈阳 110870)
直升机因其优异的机动性能在各领域被广泛应用[1-5]。由于传统的直升机起落架大多为被动或半主动控制,结构固定或可动行程较小,因此无法根据降落地形进行大范围调整,在一定程度上增加了复杂工况下直升机降落的风险[6-12]。为充分发挥直升机的机动性优势,国内外的科研机构及高校推出了多种主动控制的自适应直升机起落架。苏黎世联邦理工学院提出了一种基于Arduino与Raspberry Pi驱动步进电机的六杆自适应起落架控制系统,并对实体样机进行了性能测试,结果表明,该控制系统可实现多种复杂地形的安全降落[13]。爱丁堡龙比亚大学使用Simulink搭建了一种两杆腿式起落架的动力学PID控制器模型,并对其多种地形降落的控制性能进行了仿真,验证了控制系统的合理性[14]。立命馆大学使用NVIDA Jetson TX2配合深度视觉相机及ROS机器人操作系统实现了地形识别及控制起落架抓取物体或在复杂地形降落,并通过实体试验验证了结构及控制系统的可行性[15]。东京大学提出了一种基于自适应三维传感和高速调整起落架的无人机崎岖着陆稳定控制系统,并结合实体对该控制系统的性能进行了验证[16]。但是现有的自适应起落架控制系统多采用微型计算机作为主控元件,并采用视觉传感器[17-18],少部分使用压力传感器获取起落架接地信息[19]。控制系统的感知元件组成较为单一,控制参数较少,控制精度较低,抗干扰能力差。为实现自适应起落架更高的调节精度及更强的抗干扰能力,选用STM32微型计算机作为主控制器,Raspberry Pi作为辅助控制器,使用SLAM激光雷达、压力传感器及MPU6050惯性导航原件等多种传感器协同控制实现起落架姿态的精准调节。
1 机械结构设计
图1为X型四足自适应起落架结构示意图。该结构主要由机身连接架③和安装在四周的4条独立控制的机械腿组成,机身连接架上方安装无人机①,下方安装16线激光雷达④,单条机械腿由下支腿⑤、上支腿⑥及支腿连接架⑧构成,上支腿安装在滑轨⑦上并沿其做直线运动,滑轨相对地面垂直,这种安装方式可以确保各支腿在落地及调节过程中不会产生平行地面的偏移,可提升控制精度。压力传感器安装在下支腿⑤内,支腿连接架上安装闭环步进电机②及电磁刹车⑨,闭环步进电机旋转带动钢丝绳驱动支腿上下运动实现姿态调节。

①无人机 ②闭环步进电机 ③机身连接架 ④16线激光雷达 ⑤下支腿 ⑥上支腿 ⑦支腿滑轨 ⑧支腿连接架 ⑨电磁刹车图1 自适应起落架结构示意图Fig.1 Schematic diagram of adaptive landing gear structure
2 控制系统硬件
图2为控制系统硬件组成与通信方法。自适应起落架控制系统分为主控、感知及执行元件。主控元件主要由STM32F429GT6I主控制器与Raspberry Pi 4B辅助控制器组成,主要功能是收集与处理传感器数据,生成并向执行元件发送控制命令。感知元件由激光雷达、IMU惯性导航元件及压力传感器组成,主要功能是提取地形信息、反馈着陆信息。执行元件由闭环步进电机及其控制器组成,主要功能是接收主控元件发送的控制命令并执行[15-16]。

图2 控制硬件及通信方法Fig.2 Control hardware and communication methods
3 协同控制建模与仿真分析
3.1 协同控制框架
自适应起落架实现在复杂的静态或动态地形上降落的任务,需要多个传感器提供地形与机身姿态等信息实现协同控制。图3为自适应起落架多控制器协同控制框架,协同控制系统中包含姿态控制器、阻抗控制器、重心控制器及位置控制器在内的4种二级控制器。其中姿态控制器在协同控制中起主导作用。姿态控制器接收激光雷达提取的各支腿足端距地面高度值h1、h2、h3、h4,MPU6050感知的机身姿态数据滚转角β及俯仰角γ,计算出各支腿期望的调节量ΔLi(i=1,2,3,4),实现自适应起落架在空中根据目标地面地形的姿态预调节。

图3 协同控制框架Fig.3 Cooperative control framework
阻抗控制器接收直升机落地后足端压力传感器的压力数据Fi(i=1,2,3,4),输出各支腿期望的微调量Pfi(i=1,2,3,4),该控制器根据落地后起落架足端压力值来对支腿位置进行微调以确保足端垫与降落面之间充分接触,防止落地后直升机发生倾斜或相对地面的滑动而引发事故。
动态及静态重心控制器在自适应起落架落地后对机身重心进行微调,当直升机在动态平台降落时,读取落地时刻支腿的预调节量ΔLi(i=1,2,3,4)与阻抗控制微调量Pfi(i=1,2,3,4),经主控制器计算后得出控制参数调节支腿使机身与动态甲板保持相对水平;静态地形降落读取机身滚转角β及俯仰角γ,经主控制器计算得到各支腿期望的调节量ΔPi(i=1,2,3,4),执行元件接收到控制命令后驱动支腿微调至重心平衡位置。
3.2 建模及仿真
协同控制器中每个二级控制器都需要采集多种传感器的数据来确保控制精度及鲁棒性。以姿态控制器为例对多传感器协同控制方法进行说明,姿态控制器是协同控制系统中的关键控制器,控制算法中包含了激光雷达采集的地形高度信息、MPU6050所采集的机身姿态信息,在飞机接触地面后需采集足端压力传感器的数据作为降落过程结束的判断依据。
图4为激光雷达照射机身下方崎岖地形示意图。提取目标降落地点支腿足端与下方投影的相对空间位置,经计算得到支腿足端距离下方地面的距离h1、h2、h3、h4。当主控制器接收到3D SLAM激光雷达探测到的地形数据时,将地形数据分为L1、L2和L3、L4两组,对两组支腿的期望调节量分别进行计算。

图4 激光雷达崎岖地形参数提取Fig.4 Lidar extraction of rugged terrain parameters
分别求出h1、h2及h3、h4两组支腿足端距离地面高度的平均值Δh1、Δh2,其表达式为
(1)
(2)
将两组平均值取差,可得
Δh3=Δh1-Δh2
若Δh3为正值,则将Δh3作为两前支腿向下调节的控制量,即
ΔL1=ΔL2=Δh3
若Δh3为负值,则将Δh3作为两后支腿向下调节的控制量,即
ΔL3=ΔL4=|Δh3|
在完成前后高度落差预调节后,对两组支腿分别进行横向落差的精确调节。图5为起落架一组支腿的姿态控制算法示意图。两支腿足端向下投影在目标地面于A、B两点。

图5 起落架前支腿姿态控制算法示意图Fig.5 Schematic diagram of attitude control algorithm for front leg of landing gear
设支腿L1、L2目标降落地点下方投影高度差为Δhg1,足端投影中点连线与水平面夹角为α,直升机滚转角度为β,足端中点到机身中轴线距离为d0,则有
(3)
设目标调节位置两足端中点连线与机身水平夹角为α1,一条支腿调节量为ΔL1,另一条支腿调节量为ΔL2,则有
α1=α+β
(4)
(5)
由式(5)可知,支腿调节量ΔL1为
ΔL1=d0tanα1
(6)
将式(3)~(5)代入式(6)可得
(7)
在MATLAB的Simulink模块中对姿态控制算法进行建模。图6为姿态控制器,模型由正弦波模块、放大器模块、fun函数模块组成。

图6 姿态控制模型Fig.6 Attitude control model
图7为模拟地面地形最高点与最低点连线与水平面之间夹角变化曲线,正弦函数的波形频率为π/2,幅值经放大器放大后在0~20°之间变化。模拟机身滚转方向的摇摆,正弦函数的波形频率为2π,幅值经放大器放大后在-2.5°~2.5°之间变化。

图7 姿态控制器模拟输入及期望输出Fig.7 Simulated input and expected output of attitude controller


图8 支腿足端位移曲线Fig.8 Leg-foot displacement curves
经仿真验证,该算法可控制起落架支腿在空中根据下方地形的变化实时调节支腿位置以适应下方地形,实现复杂地形降落姿态的预调节。
4 自适应起落架样机降落试验
4.1 崎岖路面降落试验
图9a为最大落差150 mm的崎岖路面模拟降落平台。四足自适应起落架由吊车吊装,从距离地面2 m处以1 m/s速度缓慢下降接近目标着陆区域。图9b为起落架降落完成后的各支腿姿态。

图9 崎岖路面降落试验Fig.9 Landing test on rough road
图10为自适应起落架在崎岖路面降落时各支腿位移曲线图。由图10可知,各支腿在0.5 s内到达准备调节位置,又经0.5 s后运动到预期调节位置,最大调节量为75 mm,落地后机身与地面保持相对水平。调节过程中支腿运动曲线比较平滑,调节迅速。

图10 支腿调节位移曲线Fig.10 Displacement curves of leg adjustment
4.2 斜坡路面降落试验
图11a为15°斜坡路面降落平台,吊车吊装四足自适应起落架从距离地面2 m处以1 m/s速度下降至起落架成功着陆,图11b为15°斜坡路面成功降落完成后各支腿姿态。由图11可知,自适应起落架一侧支腿伸长,另一侧支腿收缩,降落后机身整体相对地面保持水平。
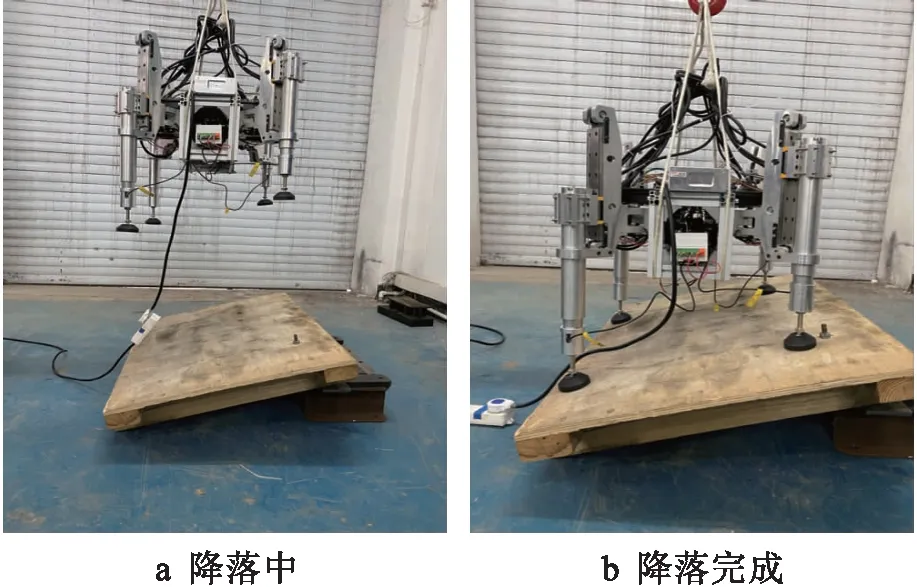
图11 斜坡路面降落试验Fig.11 Landing test on slope road
图12为自适应起落架15°斜坡路面降落各支腿调节位移曲线图。由图12可知,各支腿在0.5 s内由收缩位置运动到准备降落位置,又经过0.5 s各支腿运动50 mm后到达期望调节位置。各支腿位置调节迅速,曲线过度平滑,降落后机身重心保持水平。
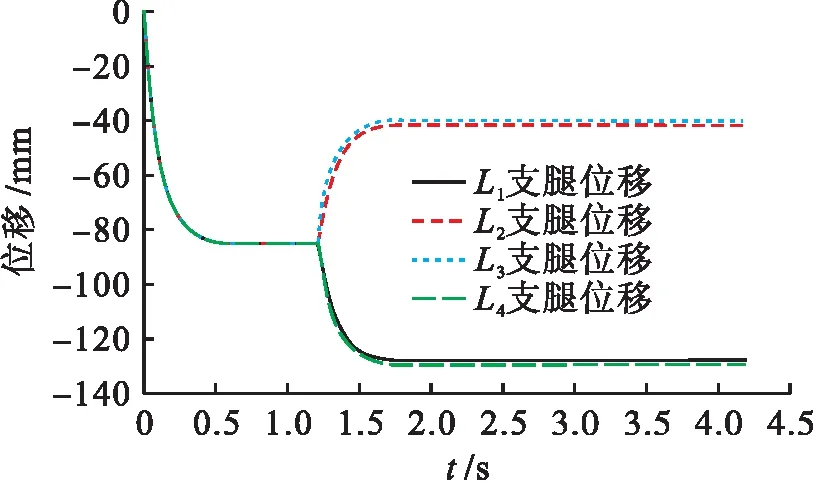
图12 斜坡降落支腿位移曲线Fig.12 Leg displacement curves of landing on slope
5 结束语
本文提出了一种基于线缆驱动的X型布局腿式起落架的协同控制系统,提出的协同控制器应用于包含多个CPU、驱动器及网络的复杂自适应起落架系统。位置控制器用于控制各支腿运动,采用闭环控制方式保证了支腿的位置精度;采用阻抗控制器保证起落架各支腿与着陆面充分接触;采用重心控制器提升落地后直升机的稳定性。使用MATLAB的Simulink模块对控制算法进行了仿真验证。本文选取最大地形落差150 mm崎岖路面及15°斜坡工况进行了模拟降落试验,结果表明,协同控制系统可在1 s内驱动支腿在空中完成姿态的预调节,支腿仅需2 s即可从收起位置到达期望的调节位置。在斜坡及崎岖路面降落后各支腿足端能良好贴合地面,未发生滑动及倾覆,降落后机身水平线与地面间平行误差小于0.5°,证明了协同控制系统驱动起落架支腿在多种复杂地形降落的有效性。
