高空长航时太阳能飞机研究进展与技术挑战
2023-12-08杨希祥侯中喜
杨希祥,侯中喜,郭 正
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073; 2. 国防科技大学 试验训练基地, 陕西 西安 710100)
临近空间(一般指距地面20~100 km高度)是高于传统航空器飞行高度、低于传统航天器轨道高度的空天结合区域,具有独特的环境特征和巨大潜在应用效能[1]。临近空间飞行器是指运行在临近空间并执行特定任务的飞行器,根据飞行高度和速度特征,可分为低速和高速两类。
高空长航时太阳能飞机是典型的低速临近空间飞行器,采用大尺度大展弦比轻质机翼,依靠太阳能和储能电池实现能量闭环,采用电机和螺旋桨构成动力推进系统,可实现区域长期驻留和抗风机动飞行[2],并形成不同于传统飞机和卫星的新型信息保障能力,在网络化互联互通、区域化持久情报监视侦察、长期化高空环境探测等领域具有巨大应用潜力[3-6]。
近年来,在军民需求和飞行变革双重驱动下,伴随轻质材料、太阳电池、储能电池等技术指标的提升和人类对临近空间环境认知的深化,高空长航时太阳能飞机在创新探索和多飞多试中接续发展,以空客Zephyr为代表的小载重型太阳能飞机已形成实用化能力[7]。
本文梳理总结高空长航时太阳能飞机发展的历史经纬,分析面临的主要技术挑战,为发展规划布局、技术创新突破、应用能力构建等提供参考借鉴。
1 高空长航时太阳能飞机研究进展
纵观高空长航时太阳能飞机40余年发展过程,整体上可分为三个阶段:初期探索阶段、快速发展阶段、实用能力验证与应用示范阶段。
1.1 初期探索阶段
人类利用太阳辐射的历史可以追溯到公元前7世纪,当时用具有放大镜功能的玻璃取火,但直到1767年,Saussure发明了太阳能集热器并用于做饭,太阳能技术的优点才开始显现。1839年, Becquerel通过电解液实验发现了光生伏打效应,这是后来一切太阳电池技术的基础。19世纪末至20世纪上半叶,太阳电池技术取得一定提升,但关键进展出现在1954年,贝尔实验室的Chapin等三位科学家研制成功光电转换效率达到6%的单晶硅太阳电池[8]。随后,Raspet提出利用太阳能驱动飞机的概念[9]。1958年起,单晶硅太阳电池逐步在航天领域应用,1960年,商业化单晶硅太阳电池效率达到14%,至1985年效率达到20%。
1974年9月,在AIAA/MIT/SST联合举办的低速飞行会议上,英国帝国理工的Irving等[9]发表论文,阐述了利用太阳能驱动飞机飞行的可行性。同年,美国Astro Flight公司建造了第一架太阳能飞机Sunrise Ⅰ,由Robert Boucher设计,并于11月进行了飞行试验,标志着太阳能飞机时代的来临,飞机质量12.25 kg,翼展9.75 m,太阳电池阵功率450 W[10-11]。1975年夏,Astro Flight公司建造了改进型太阳能飞机Sunrise Ⅱ,并在秋季开展了飞行试验,飞机构型与Sunrise Ⅰ相同,质量10.3 kg,翼展9.75 m,太阳电池功率600 W,飞行试验预定高度15.2 km,由于指控系统故障,实际飞行高度5.2 km。1977年,NASA的Kuhner等[12]提出了高空长航时太阳能飞机概念,重点是遥感和通信两大应用领域。
Sunrise Ⅱ的太阳电池后来用于AeroVironment公司(超轻型飞机先驱Paul MacCready于1971年创立)研制的、航空史上首架有人驾驶太阳能飞机Gossamer Penguin,飞机质量30.8 kg,翼展21.6 m,由于结构脆弱、可控性差,飞行测试只能在清晨风小的时候开展。1980年4月至8月开展了多次飞行试验,实现了仅依靠太阳能持续飞行14 min 21 s的里程碑式进展,为后续更高性能的太阳能飞机设计提供了实际经验。
1981年7月7日,有人驾驶的Solar Challenger飞越了英吉利海峡[8],飞行距离262.3 km,空中飞行5 h 23 min,创造了太阳能飞机历史的新里程碑。飞机质量152.4 kg(含驾驶员),长度9.24 m,翼展14.2 m,弦长1.77 m,铺装了16 128块太阳电池,在工作高度功率可达4 000 W,在海平面时功率2 500 W,安装1个电机,由Astro Flight公司提供,Dupont公司资助并生产先进材料。飞机具有大的水平安定面,可抗正常湍流。Robert Boucher在Gossamer Penguin和Solar Challenger项目中担任关键顾问角色[13]。
1982年,NASA的Yongblood等[14]研究了高空长航时太阳能飞机总体设计方法。同期,NASA资助AeroVironment公司开展了高空长航时太阳能飞机项目HALSOL[15],探索20 km高空飞行的可行性,建造了3架缩比机和1架原型机,验证了气动和结构设计技术,但能源存储技术难以满足高空长航时飞行需求,后项目被搁置,10年后重启演变为Pathfinder项目。
1.2 快速发展阶段
快速发展阶段的典型代表计划是NASA联合AeroVironment公司的环境研究飞机和传感器技术(environmental research aircraft and sensor technology, ERAST)计划、DARPA联合波音公司的Vulture计划、Airbus防务与空间公司的Zephyr计划。
1.2.1 ERAST计划
1993年下半年,NASA联合AeroVironment公司启动ERAST计划,目标是发展在20 km附近高空的长航时飞机,用于环境采样和传感,先后研制了Pathfinder、Pathfinder Plus、Centurion、Helios四型高空太阳能飞机[13,16-17],创造了多项飞行高度和航时记录。
Pathfinder是高空太阳能飞机技术验证平台,旨在验证大型轻质复合材料结构、低翼载飞翼机翼、低雷诺数空气动力学、容错控制、高效太阳电池等技术。飞机长度3.66 m,翼展30 m,弦长2.44 m,质量254 kg,太阳电池最大输出功率7 500 W,转换效率约14%,安装6台电机,单台功率1.25 kW。1993年,在弹道导弹防御办公室主导下,Pathfinder在NASA Dryden 研究中心开展了第一次飞行试验,研究其在反弹道导弹中的潜在应用。1995年9月11日,Pathfinder超越Solar Challenger,实现了15.5 km的飞行高度,被美国国家航空协会列入“1995年最难忘的10个飞行纪录”。1997年7月7日,通过改进太阳电池接收的光入射角度,在位于夏威夷的海军太平洋导弹靶场创造了21.8 km的太阳能动力飞行高度纪录,也是螺旋桨推进的飞行高度纪录。海军太平洋导弹靶场具有好的日照条件、良好的空域和无线电条件、有利于验证载荷成像的多样化陆地和海岸生态系统等,被认为是开展太阳能飞行器试验的理想地点,Pathfinder在这里共开展了7次飞行试验。
1998年,通过增加翼展、改进电机、采用更高效的太阳电池,研制了Pathfinder Plus,其实际上是Pathfinder和之后的Centurion之间的一个过渡型号,目的是验证新的太阳电池、气动、推进等技术,飞机质量317.5 kg。Pathfinder Plus翼展36.88 m,采用了新的长度13.4 m的中翼,新的硅基太阳电池转换效率达19%,最大输出功率约12 500 W,由SunPower公司提供,安装8台电机,单台最大功率1.5 kW,巡航速度27.4~32.2 km/h。1998年8月6日,在海军太平洋导弹靶场创造了24.5 km的飞行高度新纪录,其中21.3 km以上高度飞行航时为3.5 h,任务载荷质量为30.8 kg。
Centurion属于轻质飞翼太阳能飞机,目标是作为未来航时数周甚至数月的太阳能飞机的原型技术验证机,质量816.8 kg(24.4 km高度)。飞机机翼分5段,材料主要采用碳纤维、石墨环氧树脂复合材料和凯夫拉,5段机翼厚度相同,均为29.2 cm,没有梯形度或后掠,翼展62.8 m,弦长和Pathfinder 相同,展弦比26。太阳电池夏季日中天最大输出功率31 kW,搭载了可支持不超过5 h飞行的备用锂电池,安装14台电机,单台功率2.2 kW。机翼下方安装4个设备舱,并安装储能电池、飞控设备、压舱物和起落装置。1998年开展了采用储能电池动力的低空飞行试验,验证了飞行控制和结构性能。
Helios是AeroVironment公司拟发展的终极版太阳能飞机,以前述三型太阳能飞机技术为基础,增加储能电池用于夜间飞行,设计飞行航时4~6个月,载荷质量约100 kg,载荷功耗1 000 W。Helios分为高空型(HP01)和长航时型(HP03)两个版本。HP01翼展75.3 m,质量929 kg,太阳电池输出功率42 kW,仍然采用14台电机,4台在新的中间两段机翼上进行了重新布置。
2001年8月,HP01在海军太平洋导弹靶场起飞,创造了29.5 km的飞行高度新纪录。HP03主要目标是采用氢-空气燃料电池完成15.2 km高度跨夜间持续飞行,飞机翼展与HP01相同,质量达到1 051 kg,展弦比31。2003年6月7日,HP03完成首飞,结果表明其具有在15.2 km高度飞行30 h的能力,2003年6月26日,HP03在飞行试验中遭遇低空强湍流解体[3,18],同年,ERAST计划正式终止。2017年,日本SoftBank公司和AeroVironment公司联合成立HapsMobile子公司,以Helios为基础研发用于高空移动通信的太阳能飞机Sunglider,2020年9月在新墨西哥州开展了飞行测试,在约19 km高度成功实现了稳定的4G网络连接[19]。
1.2.2 Vulture计划
2007年,DARPA启动Vulture计划,美国空军研究实验室(air force research laboratory, AFRL)和NASA也给予了支持,目的是发展高空超长航时侦察用大型重载太阳能飞机,预期持续飞行航时5年,载荷质量450 kg,载荷功耗5 kW。
2008年4月,DAPRA分别和极光、波音、洛克希德·马丁三家公司签订合同,开展总体方案设计(第一阶段)。极光公司提出了Odysseus方案,波音公司联合英国QinetiQ公司提出了SolarEagle方案,洛克希德·马丁联合AeroVironment公司在Helios基础上提出了增强结构安全性的方案。DARPA最终选择了SolarEagle方案,2010年9月,授予波音公司9 000万美元的合同,开展全尺寸验证机研制和飞行试验(第二阶段),周期为4年[20]。SolarEagle验证机翼展122 m,采用四机身四尾翼组合模式,验证试验计划飞行30 d。2012年,DARPA取消了验证机研制和飞行试验。2017年,极光公司被波音公司收购,2018年11月,波音公司宣布正在研制Odysseus高空长航时太阳能飞机[21],相对2008年的概念方案做了较大调整,设计飞行时间中纬度地区可达1年、极地6个月,最大载荷质量超50 kg,翼展74 m,机身采用薄壁轻质高强碳纤维结构,采用薄膜砷化镓太阳电池和最大功率点跟踪技术,电池组件转换效率超25%,稳定输出功率250 W,采用三尾翼布局,安装六套双叶可变距螺旋桨推进系统。2019年7月,宣布无限期推迟原定当年开展的首次飞行试验。
1.2.3 Zephyr计划
在NASA和AeroVironment公司发展尺寸越来越大的太阳能飞机的同时,中小型轻质太阳能飞机技术也取得重要突破,典型代表是Zephyr计划[22-24]。
Zephyr计划开始于2001年,最初是用于拍摄打破世界高度纪录的气球飞行,英国QinetiQ公司研制了概念验证机Zephyr2,质量不到7 kg,有自由飞行和系留飞行两种模式,在Clifton吊桥成功试飞。2002年,研制了Zephyr3,长度12 m,质量15 kg,原计划由载人气球系留带至高空,因气球出现技术问题未能试飞。此后,QinetiQ公司转向发展Zephyr无人机,用于侦察监视、对地观测、远程感知、通信中继、灾害监测、互联网接入服务等。2005年2月,Zephyr4由高空气球在9.14 km高度放飞,飞行1 h,主要目的是探索降低技术风险,验证高空长航时无人机基本特性、能源需求、夜间飞行高度等,飞机翼展12 m,质量约17 kg。
Zephyr5继续用于探索降低技术风险,包括两个型号。研究发现,Zephyr可低速在稠密大气层中飞行,因此QinetiQ公司决定改用地面手掷起飞方式,回收采用机腹着陆方式。鉴于Zephyr对低层大气阵风比较敏感,放飞天气窗口选择非常重要。Zephyr5-1同时配备储能电池和太阳电池,质量31 kg,Zephyr5-2仅使用不可充电的储能电池,质量25 kg,不能跨昼夜。2005年12月,两型飞机在美国新墨西哥州白沙导弹靶场试飞,分别飞行4 h和6 h,验证了地面起飞、上升、巡航和下降等技术。2006年7月,两型飞机再次开展了飞行试验,Zephyr5-1飞行18 h(夜间飞行7 h),飞行高度达到10.97 km,试验中搭载了光学和红外载荷,Zephyr5-2飞行17 h。通过Zephyr5,飞行控制和储能电池技术得到很大提升。
Zephyr6在Zephyr5基础上迈进了一大步,是一款全功能验证平台,太阳电池可在飞行中为储能电池充电。Zephyr6翼展18 m,采用超轻碳纤维材料,质量不超过30 kg。2007年7月,Zephyr6在新墨西哥州连续飞行54 h,最大飞行高度17.8 km;2008年8月,在亚利桑那州的陆军尤马靶场,飞行高度达到18.3 km,飞行时间82 h 37 min[25-26],刷新了无人机领域由全球鹰保持的30 h的纪录。在这个阶段,Zephyr获得了美国国防部的资助,得以进入一个新的五年发展阶段。
Zephyr7继承了大量Zephyr6的技术,目标是采用太阳电池和储能电池构成循环能源系统,最终实现月量级飞行航时。设计飞行高度为白天19.8 km,夜间13.7 km。采用晶体硅太阳电池和锂硫储能电池,在最优能量质量比设计目标下,采用转换效率10%的太阳电池,锂硫电池比能量约350 Wh/kg。鉴于Zephyr6试验中减驱电机出现的问题,采用了直驱电机,提高了推进系统效率和可靠性。飞机质量53 kg,翼展22.5 m,机翼面积较Zephyr6增加约50%,改用T型尾翼,为增加稳定性,增加一对翼梢小翼。飞机在起飞阶段采用遥控模式,到达巡航高度后切换为自主飞行模式。2010年7月9日至23日, Zephyr7在亚利桑那州的陆军尤马靶场,创造了连续飞行336 h 22 min的航时新纪录[27],飞行高度达到21.6 km,搭载了侦察和通信中继载荷,证明了高空长航时太阳能飞机概念和技术路线的可行性,基本完成了全部技术验证工作,向构建实用能力迈进了一大步,在世界范围内引发了高空长航时太阳能飞机发展热潮,是具有重大意义的里程碑事件。
2013年,空客防务与空间公司从QinetiQ公司收购了Zephyr项目,作为对卫星功能的补充,致力于实现民用和商业化,包括高分辨率成像、红外成像、应急通信网构建等。2014年冬季,Zephyr7在南半球完成了超过11天的高难度长航时飞行试验[28]。同年,空客启动可用于生产的定型版飞机ZephyrS(也称Zephyr8)的研制,飞行高度约21 km,巡航速度55 km/h,载荷质量5~10 kg。
1.3 实用能力验证与应用示范阶段
2016年,英国国防部宣布购买3架ZephyrS太阳能飞机,用于作战概念与作战能力验证[29]。2018年7月11日,在英国国防部支持下,第1架ZephyrS自亚利桑那州靶场起飞,创造了25 d 23 h 57 min的超长航时飞行新纪元[30],最高飞行高度21.7 km,持续飞行高度18.3 km,证明了系统能力,实现了所有预定试验目标。飞机翼展25 m,质量约65 kg,储能电池质量约占1/3,设计飞行时间达100 d,爬升速度约0.42 m/s,采用高效砷化镓太阳电池和硅纳米线负极材料高比能量锂电池,太阳电池效率达28%,功率密度达1 kW/kg,锂电池单体比能量435 Wh/kg,循环寿命200次,配置2台450 W的电机。2018年7月16日,空客宣布第一条组装生产线开始运营[31]。
2019年3月和9月,ZephyrS经历了2次失败的试验,主要是上升过程不稳定气流造成滚转失控,最终导致飞机机翼结构破坏和折断[32](见图1[32]),但并未影响整体的顺利进展。2020年11月前三周,ZephyrS在亚利桑那州成功完成了年度飞行试验,飞机采用了新的软件控制系统,全面验证了起飞、爬升、巡航、下降、着陆全包络飞行性能,重点验证了飞机敏捷性、灵活稳健的控制与运行管理能力[33]。

图1 ZephyrS飞行试验中机翼折断位置 [32]Fig.1 Wing fracture locations of ZephyrS in flight test [32]
2021年夏,ZephyrS进一步在亚利桑那州开展了面向应用的系列飞行试验[34]。先期采用1/3缩比机开展了4次低空飞行试验,进一步验证了新的设计改进、多飞机操作、敏捷操作和人员训练。采用全尺寸飞机开展了2次平流层飞行试验:2021年7月16日开展了第一次飞行试验,飞行时间17 d 23 h 39 min,搭载了用于分析和改进飞行包线、结构完整性的设备;8月25日开展了第二次飞行试验,飞行试验18 d 22 h 30 min,这为英国国防部开展的作战应用验证飞行创造了23.2 km的飞行高度新纪录,验证了区域驻留、机动飞行等性能,证明了具有快速响应、持久的作战应用能力,为形成可部署的装备产品创造了条件。试验中搭载了侦察、通信等多类型载荷,测试了新一代对地观测载荷,能够同时提供图像和分辨率18 cm的视频,试验中获取了20 000幅图像;搭载了无线电发射机,与地面天线开展通信试验,设置了多类型天气条件、接收距离、飞行模式等。结果表明,在平流层可提供2 GHz频谱服务的能力,可使用450 MHz窄带在140 km范围内提供连接服务,验证了ZephyrS具备提供无线宽带连接的能力,在高原、海岛、海上等通信中具有巨大应用潜力。2022年6月15日,ZephyrS在亚利桑那州靶场起飞,至8月16日飞行航时已超60 d,远远打破了其在2018年创造的飞行航时纪录。
当前,ZephyrS总飞行航时已超过3 600 h,未来将发展载荷能力更大、全年可用的ZephyrT(也称Zephyr9)型号[35],采用双尾撑布局,翼展32 m,质量超140 kg,具有更大的载荷能力,可搭载雷达、激光雷达、电子战或电子侦察等多类型载荷。更长飞行航时、更大载荷能力也是整个高空长航时太阳能飞机的发展方向和趋势。
2 高空长航时太阳能飞机技术挑战
2.1 低雷诺数条件下高效气动布局设计
太阳能飞机平飞功率与速度的3次方成正比,为降低能耗,通常以较低速度(10~70 m/s)飞行,而20 km附近高空大气密度稀薄,约为地面的7%[1]。为实现升重平衡,需要高升力系数(一般大于1.0),高升力系数会造成诱导阻力增加,进而导致阻力增加(见图2[36],图中CD为阻力系数,CL为升力系数,Re为雷诺数),且平飞功率与升阻比并不总保持线性关系,而与功率因子成反比,综合来说,太阳能飞机高效气动布局需以高升力系数为基础(见图3[37],图中CL为升力系数,Cm为俯仰力矩系数,δe为舵偏角),兼顾低阻力系数、高升阻比、高功率因子。同时,太阳能飞机高空低速飞行特性,造成其工作在低雷诺数下(不超过106),往往存在流动分离和转捩等特殊气动现象[38]。流动分离产生的分离气泡等,会造成气动性能大幅下降;流动转捩造成层流和湍流同时存在,且转捩位置受机翼翼型形状、攻角、来流速度等影响。

图2 高升力翼型E387在低雷诺数下的升阻特性[36]Fig.2 Lift and drag characteristics of E387 airfoil in low Reynolds number[36]
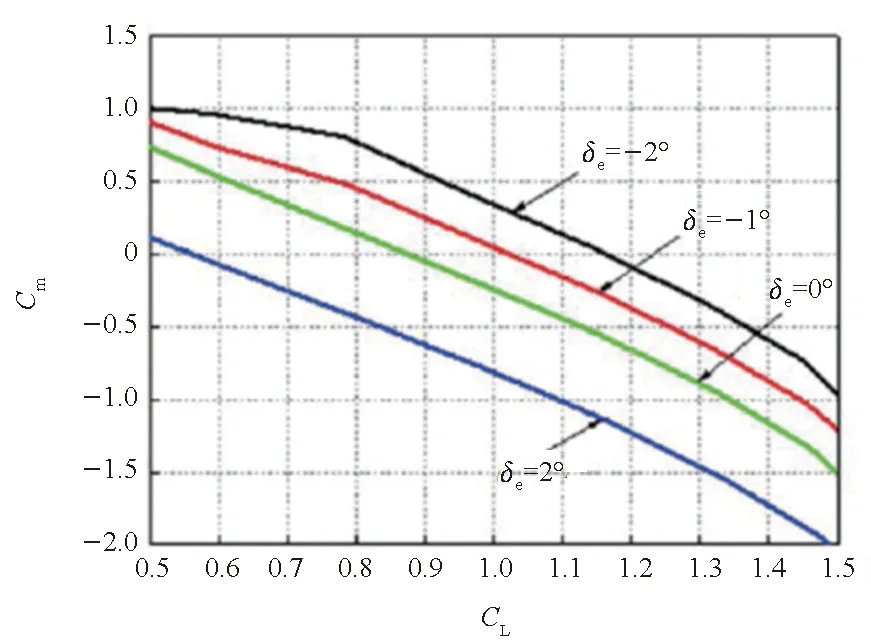
图3 类ZephyrS无人机升力系数与俯仰力矩系数 [37]Fig.3 Lift coefficient and pitching moment coefficient for a ZephyrS-like UAV[37]
为解决这一问题,重点研究方向包括:低雷诺数下气动特性数值模拟方法、边界层转捩和流动分离特性、流动分离控制、部件耦合干扰特性、适应低雷诺数条件的高升低阻高功率因子的气动布局设计等。
2.2 高比能量储能电池技术
循环能源系统是保证高空长航时太阳能飞机实现N×24 h长期驻空的关键,储能电池是夜间飞行的能量源,太阳能飞机能量短缺主要源于储能电池能量密度和功率密度相对较低[39](见图4[40])。储能电池质量可达整个太阳能飞机系统的30%~50%[41],在升重平衡约束下,大质量的储能电池造成太阳能飞机尺寸规模增加,尺寸规模增加又造成能源需求增加,形成“恶性循环”,造成太阳能飞机设计域极其狭窄。锂离子电池和锂聚合物电池是中低空太阳能飞行器上使用最多的储能电池,氢氧再生燃料电池则在理论上适用于长航时大功耗飞行,与之伴随的挑战是,锂离子电池在现有材料体系下比能量提升空间已很有限(200~240 Wh/kg),难以实现高空跨昼夜飞行,锂硫电池仅仅几十次的循环性能难以满足月量级飞行实际要求,再生燃料电池效率有待提升。

图4 典型储能电池能量密度和功率密度[40]Fig.4 Energy density and power density for typical energy storage battery[40]
为解决这一问题,重点攻关方向包括:锂离子电池高容量正负极材料技术、新型锂离子电池电解液或电极界面稳定技术、锂硫电池循环稳定技术、大容量锂硫电池堆设计与临近空间环境适应性技术、高效率氢氧燃料电池与高比功率水电解器、再生氢氧燃料电池系统集成与优化技术等。
2.3 高效宽工况电机螺旋桨推进技术
电机螺旋桨构成的动力推进系统是高空长航时太阳能飞机巡航飞行和区域保持控制的关键保障,是全机最大的能量消耗源,其整体工作效率对能源系统乃至总体设计影响巨大,目前,电机效率已达90%以上,提升空间有限,螺旋桨效率低于60%,是推进系统整体效率提升的主要关注点。太阳能飞机飞行高度和飞行速度变化较大, 差异化工况下推进系统性能变化很大,10 m量级大桨径螺旋桨推进系统在偏离设计点高度和风速时推力损失最大可达60%,若采用高空、低空两套推进系统,则会给系统造成质量代价。因此,高空太阳能飞机推进系统既要满足高空稀薄大气条件下的高效率和高可靠性要求,又要适应飞行高度和速度大跨度变化条件[42-43]。同时,电机数量、转速等与不同尺度螺旋桨匹配,对推进系统整体性能存在重要影响(见图5[44])。
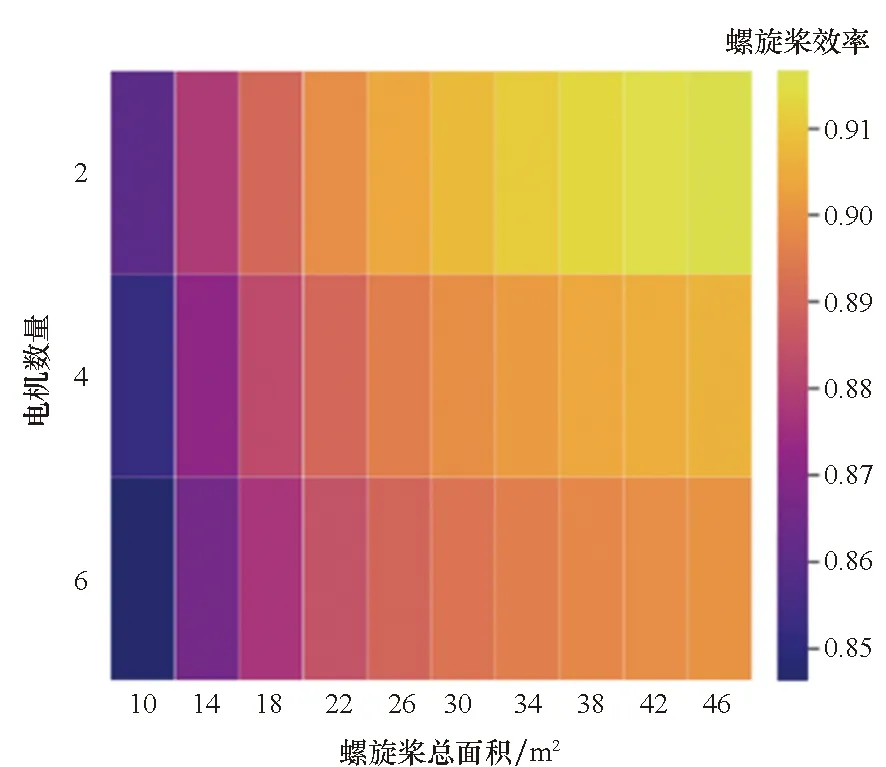
图5 适应不同推进系统构型的螺旋桨优化设计[44]Fig.5 Optimal design of propeller for different propulsion system configuration[44]
为解决这一问题,重点攻关方向包括:高空低雷诺数下高效螺旋桨翼型设计、高空稀薄大气下电机长期工作可靠性提升技术、推进系统宽工况适应性技术、电机/螺旋桨匹配设计技术、推进系统效率测试技术[45]等。
2.4 大展弦比轻质结构与振动控制技术
高空长航时太阳能飞机飞行速度低,太阳能获取能力不高,为维持升重平衡和能源平衡,需设计为大尺度大展弦比结构(翼展数十米至百米,展弦比几十),并严格限制结构质量(2~3 kg/m2),以适应太阳能飞机小翼载荷特性(仅为传统有人驾驶飞机的百分之几)。太阳能飞机结构包括主机翼、机身、尾翼等(见图6[46]),其中,主机翼质量占结构质量的大部分,需特别设计[47]。同时,大尺度大展弦比机翼往往会产生较大上反(可高达半翼展的1/4),传统线性理论无法分析结构气动耦合特性,难以控制结构失效[48],Helios、ZephyrS飞行试验都曾遭遇过相关问题。

图6 典型太阳能飞机机翼结构[46]Fig.6 Typical wing structure for solar-powered UAV[46]
为解决这一问题,重点攻关方向包括:轻质高强复合材料技术、大尺度结构几何拓扑优化技术、轻质高柔韧性高效太阳电池技术、大展弦比机翼气动弹性和颤振仿真技术、结构振动控制技术[53]等。
2.5 面向任务的航迹规划与控制技术
高空长航时太阳能飞机能量需求与飞行航迹密切相关,两者呈强耦合关系,航迹规划策略对飞行航时具有关键影响。太阳能飞机飞行速度低,与环境风场速度在一个量级,飞行控制受风场扰动影响明显[49]。太阳能飞机数周甚至数月长期巡航驻空,面对的任务场景复杂多变,加上任务驻留区域约束(见图7[50])、能源动力约束多、控制能力受限、高空风场环境小尺度未知变化等[51-52],给航迹规划和制导控制造成很大挑战,且与传统航空器存在很大差异。此外,太阳能飞机未来在海上等大区域范围使用,多机编队组网是常态应用模式。
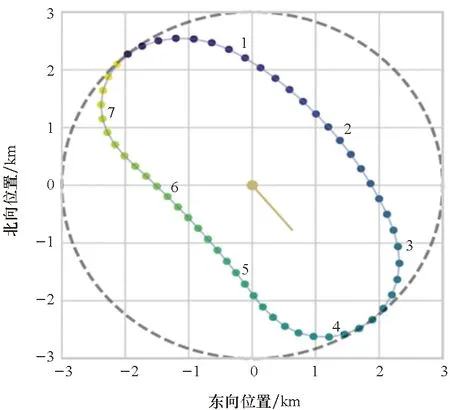
图7 任务区域约束下太阳能飞机轨迹规划[50]Fig.7 Path planning for solar powered UAV under station-keeping constraints[50]
为解决这一问题,重点攻关方向包括:应用任务、能源、动力、控制综合约束的航迹规划技术,高精度强鲁棒制导控制系统一体化设计技术,航迹在线智能规划与智能控制技术,面向区域覆盖的多太阳能飞机编队控制技术[53]等。
2.6 临近空间环境能量综合利用技术
能量紧缺是高空长航时太阳能飞机最核心的问题之一,基本贯穿所有技术挑战。在现有能源系统指标水平,特别是储能电池比能量指标相对较低的条件下,需探索从“对抗”到“和谐”的环境相处之道,从临近空间辐照、风场等环境中综合获取、存储能量[40],打破太阳电池和储能电池构成的“小范围能量闭环”局限,拓展飞行航时和载荷能力边界。与之并存的挑战是,环境能量获取与飞行器运动参数之间的关联机理与耦合模型如何揭示建立、动态环境如何准确感知、静态设计方案如何在动态变化的环境中保证能量昼夜闭环等。
为解决这一问题,重点攻关方向包括:临近空间风场环境特征与演化规律、风场在线感知与估计方法、梯度风场中滑翔模式与能量获取机制(见图8[41])、重力势储能飞行轨迹设计与能量管理策略(见图9[41])等。
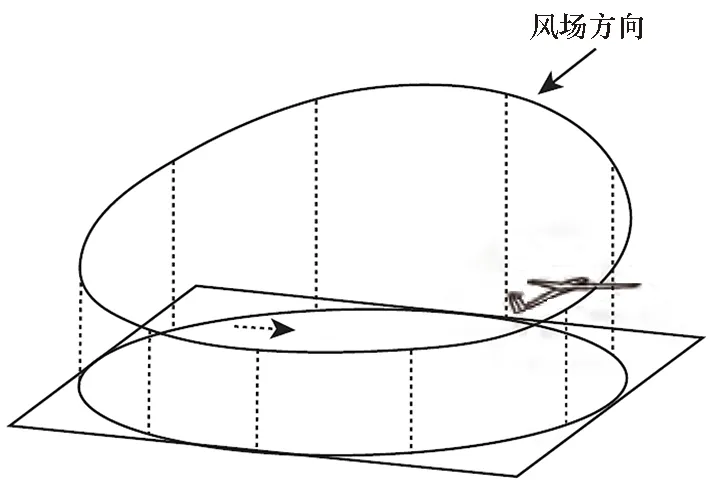
图8 梯度风场中椭圆形滑翔模式[41]Fig.8 Elliptical mode dynamic soaring in gradient wind[41]
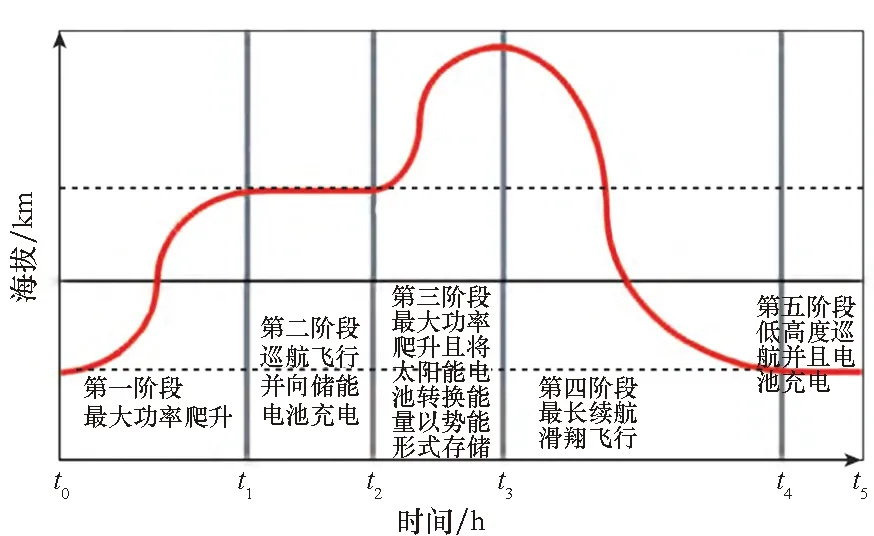
图9 重力势储能模式中典型飞行轨迹[41]Fig.9 Typical trajectory in gravitational potential energy storage mode[41]
3 总结
高空长航时太阳能飞机是当前空天领域的前沿热点方向,可形成“时间持久+区域保持”的新的应用能力,是传统飞机和卫星系统的有力补充,对构建空天一体的应用体系,培育产业经济发展新动能,意义重大。本文系统总结了高空长航时太阳能飞机发展历程,分析了主要技术挑战,下一步,将针对重点攻关方向,持续开展应用基础与技术创新研究。
