一种利用位置误差模型的机器人位姿标定方法
2023-12-07高文斌杜涛罗瑞卿
高文斌 , ,杜涛 , ,罗瑞卿
(1.安徽工业大学 机械工程学院,安徽马鞍山 243032;2.安徽工业大学 特种重载机器人安徽省重点实验室,安徽马鞍山 243032)
工业机器人因成本低、工作空间大和灵活性好等特点广泛应用于搬运、堆垛、喷涂等工业生产领域,但是较低的位姿精度限制了机器人在铣削、打磨等精密加工制造领域的应用[1-3]。由制造公差、装配误差和使用磨损等引起的几何参数误差占到机器人总位姿误差的90%左右。运动学参数标定是获得机器人准确几何参数,提高机器人位姿精度的一种经济有效的方法[4-6]。
机器人运动学参数标定主要包括误差建模、标定测量、参数识别和精度补偿4 个步骤。按照误差建模的方式,运动学误差模型可分为距离误差模型[7-8]、位置误差模型[9-10]和位姿误差模型[11-14]。目前,实现机器人位姿精度补偿的参数标定方法大多基于位姿误差模型。文献[11]采用D-H 模型和微分变换方法建立机器人末端位姿误差模型。文献[12]给出了一种基于对偶四元数的机器人位姿误差模型。文献[13]基于局部指数积公式建立了机器人位姿误差模型,提出了基于立体视觉的机器人自标定方法。文献[14]利用零参考模型(ZRM)建立机器人位姿误差模型,提出了一种基于ZRM-MDH 模型转换的运动学参数标定方法。在直接利用机器人末端位姿误差进行参数误差辨识时,由于位姿误差模型中位置误差量和姿态误差量的单位不同,导致两种误差的量级不同,造成识别模型中位置误差和姿态误差权重不合理,不但降低了参数识别精度,而且可能导致识别过程不收敛[15]。文献[16]指出通过在位姿标定模型中增加权重矩阵的方法可提高参数识别精度和稳定性,但最佳权重矩阵不易获得。
品管圈是由工作性质相同或相近的人们自动自发组成数人一圈的小圈团体,然后全体合作、集思广益,按照一定的活动程序,利用品管手法,来解决工作现场、管理和文化等方面所发生的问题及课题[1]。输血是一把“双刃剑”,既治病又致病。输血是抢救生命和疾病治疗的重要措施之一,但是输血也是一个高风险的过程,任何一个环节的疏漏都会造成严重的后果。输血流程的畅通可以为患者争取更多的抢救时间,也可以避免不必要的医疗纠纷[2]。因此本文探讨品管圈活动对降低临床输血流程缺陷率的效果,现汇报如下。
为避免上述问题,基于指数积公式给出一种直接利用末端位置信息的串联机器人位姿标定方法,并通过物理试验对标定方法的正确性和有效性进行验证。
1 运动学模型
如图1 所示,n自由度的串联机器人末端固定3 个参考点。
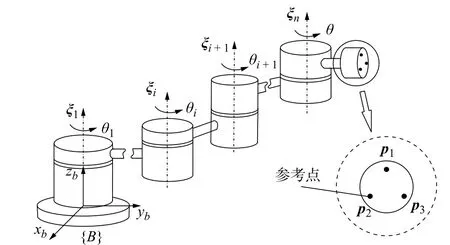
图1 n 自由度串联机器人Fig.1 n-DOF serial robot
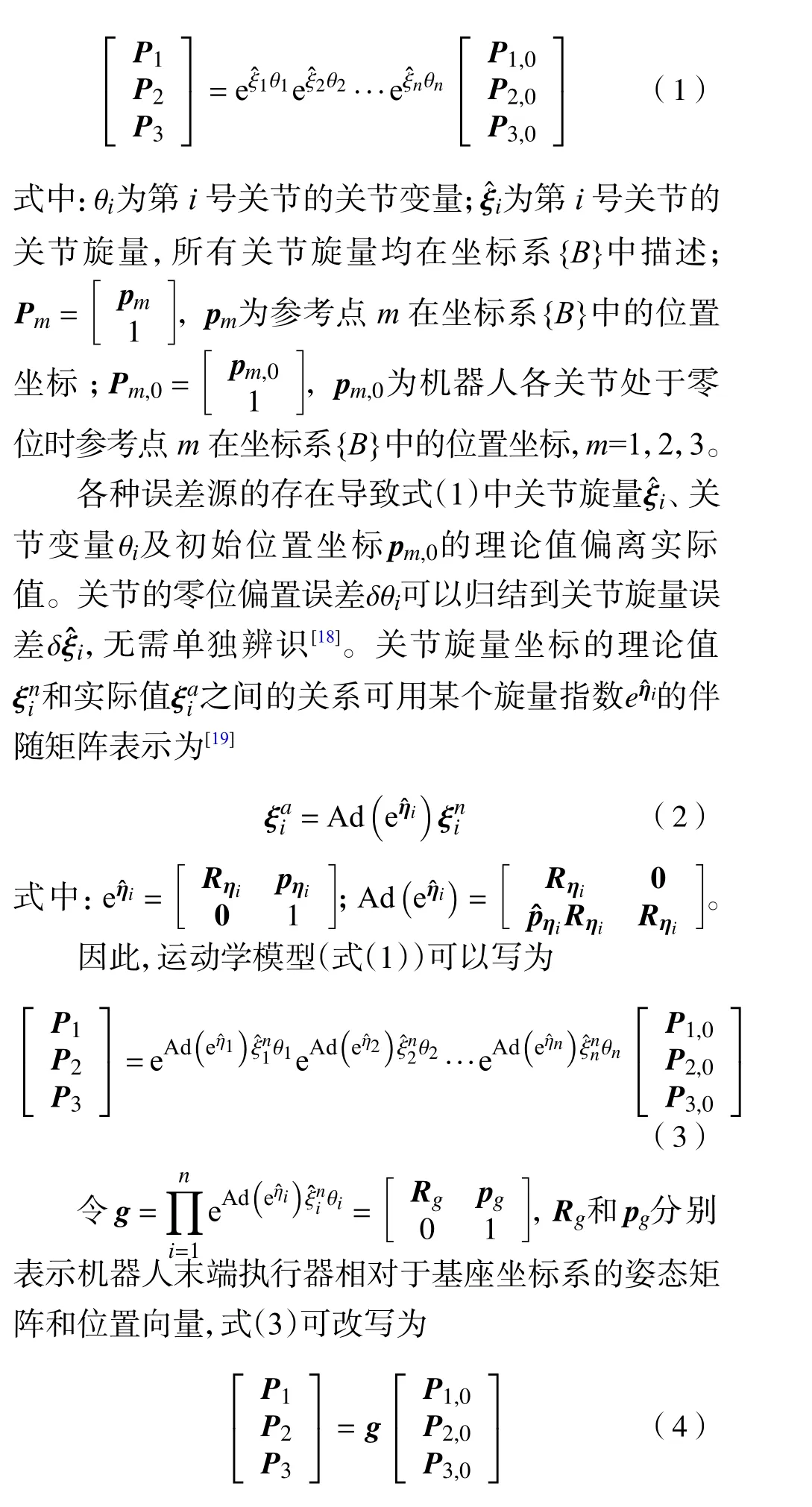
基于指数积公式,3 个参考点在机器人基座坐标系{B}中的运动学方程可表示为[17]
2 标定模型
3)计算每个标定位姿对应的参考点位置误差向量δpm,即δpm=pam-pnm。
环渤海是我国大气污染治理的首要地区,能源消费总量占全国的18.9%,其中山东省能源消费总量位居全国第一,河北省位居第三;煤炭消费总量占能源消费总量的72.4%,其中北京、天津煤炭消费占比较低,河北达到86%,山东为79%;北京天然气消费占比达到29%,天津达到10%以上,河北和山东天然气消费占比不足4%。根据大气污染治理“控制煤炭消费量,提高天然气等清洁能源消费占比”的总体方向,该地区是未来天然气发展的潜力市场。


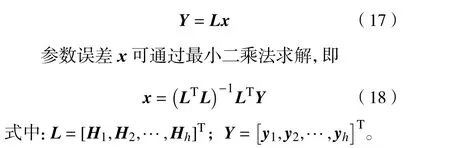
控制机器人运动到工作空间中h个标定位姿,根据式(16)可得到h组误差方程,联立h组误差方程可得到机器人运动学参数标定方程为
相比于其他社会群体,大学生身份事实上更有助于创业,其原因在于群体间交流互动程度和地域优势。典型范例,如“饿了么”起源于上海交大的一个校园订餐平台。大学生在接受高等教育期间,对生活品质有了一定要求,资金也较为宽裕。同时个体之间互动性强,经营者需要的推广成本较低。并且,现阶段大学院校普遍位于城市中心区之外的大学城,集群性高、物流成本低,是创业的绝佳起点[1]。
机器人运动学参数如表1 所示。

表1 机器人运动学参数Tab.1 Kinematic parameters of the robot
3 参数标定流程
运动学参数标定流程如图2 所示。
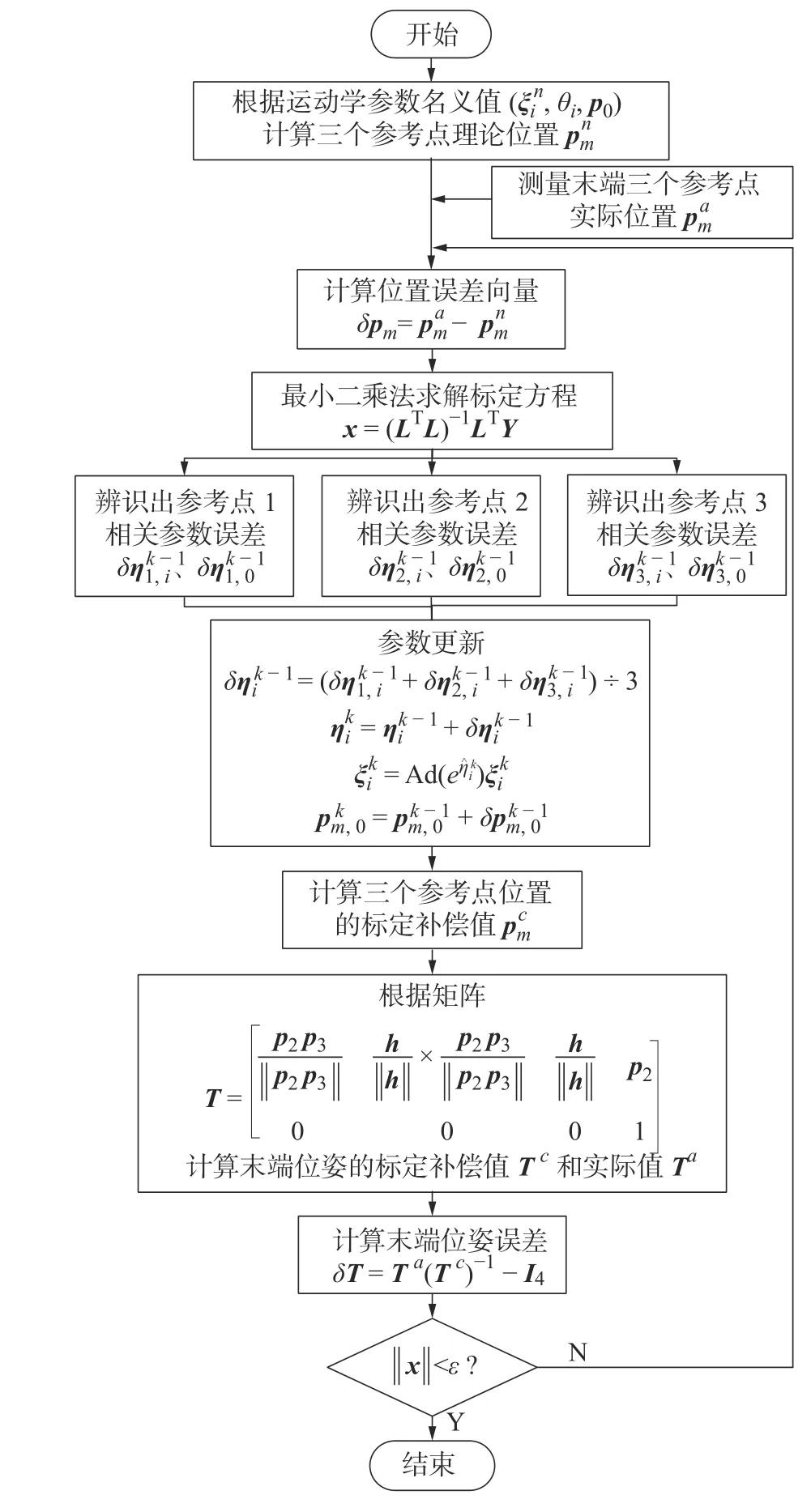
图2 运动学参数标定流程Fig.2 Kinematic parameter identification process
具体步骤如下:
1)在机器人的工作空间范围内随机生成h组关节变量,根据理论运动学模型计算机器人末端3 个参考点的理论位置pnm。
9)重复步骤3)~步骤8),将参考点位置标定补偿值pcm作 为下一次迭代的理论值pnm,直至参数误差模 //x//降至预定阈值时结束迭代,并输出运动学参数ξi和pm,0。
通过对运动学模型(式(4))两边取微分可得到机器人的位置误差模型为
7)如图3 所示,构建机器人末端工具坐标系。以点p2为 坐标系的原点,x轴与向量p2p3同向,z轴与3 个点所在平面法向量h同向,h=p2p1×p2p3,y轴可通过右手定则得到。末端工具坐标系相对于基座坐标系{B}的位姿可用一个齐次变换矩阵T表示为
应用投入导向规模效率可变BCC模型,运用DEAP2.1软件,对2009年和2016年我国各区域高技术产业技术创新效率进行测算,结果见表2。
本研究结果数据显示,不同年龄段患儿呼吸道感染非典型病原体的组成不同,0~1岁患儿九种呼吸道感染病原体单项阳性率排前两位的是MP、RSV,而1岁及以上患儿是MP、INFB。非典型病原体阳性率与年龄有关,在0~10岁患儿中,非典型病原体阳性率随患儿年龄增加而升高,其中MP、INFB、PINF趋势明显。这可能跟因年龄不同免疫能力不同有关,还可能与不同年龄段儿童生活环境不同有关,学龄儿童以群居为主,增加了交叉感染的机会。
6)计算每个标定位姿下的参考点位置标定补偿值pcm。
4)计算运动学参数误差δ ηm,i和 δpm,0。

图3 构建工具坐标系Fig.3 Tool coordinate system construction
利用式(19)分别计算h个标定位姿对应的末端位姿标定补偿值Tc和 实际值Ta。
8)计算每个标定位姿处末端位姿标定补偿值和实际值的误差,即
2)控制机器人运动到标定位姿,使用测量设备测量参考点在坐标系{B}中的实际位置pam。
4 试验
图4 为搭建的机器人标定试验系统,由Leica-AT960-MR 激光跟踪仪、UR5 机器人、靶球和3 个固定在末端法兰上的靶球底座组成。激光跟踪仪的空间测量精度为15 μm + 6 μm/m,UR5 机器人的重复定位精度为 ± 0.03 mm,有效工作半径为850 mm。实验时将机器人放置在激光跟踪仪的工作空间内,通过Spatial Analyzer 软件构建机器人基座坐标系{B},并将激光跟踪仪坐标系设置与坐标系{B}重合,所有的靶球坐标测量值均在坐标系{B}中表示。
5)更新运动学参数(机器人关节旋量坐标 ξi和参考点初始位置坐标pm,0)。

图4 试验系统Fig.4 Experiment system
4.1 标定试验
在机器人的工作空间内随机生成40 组关节变量,用于运动学参数标定试验。通过手动示教的方式控制机器人运动到标定位姿,靶球依次放置在末端法兰的靶球座上,利用激光跟踪仪测量相应靶球位置坐标,如表2 所示。

表2 标定试验靶球位置坐标Tab.2 Position coordinates of the calibration test's target balls
根据图2 所示的标定流程辨识运动学参数,辨识结果如表1 所示。如图5 所示,经过3 次迭代后,机器人末端位置和姿态误差模显著减小并收敛到稳定值。
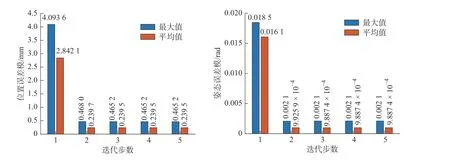
图5 迭代过程中位姿误差模Fig.5 Norms of position errors in iterative processes
4.2 验证试验
为了验证标定后参数的准确性,在机器人的工作空间内随机生成20 组关节变量。控制机器人运动到相应的验证位姿,通过激光跟踪仪测量末端3 个靶球的位置坐标值,如表3 所示,并利用式(19)计算出末端实际位姿。
阔叶树种,在京城及周边木材市场上进入4季度销路仍然畅通。与针叶原木市场相同的是,在京城以及周边木材市场上经营东北原木的商家普遍认同的仍是俄产木材。这一块阔叶原木由于需求不减,资源品质有保证,价格水平下行机会几乎全无。另外,从俄方进口的北洋阔叶树种原木像榆木、楸木、桦木、杨木、柞木、椴木和水曲柳,不仅需求仍然保持着前两个月的强劲势头,其销售价位也继续坚挺上扬,例如北方市场最认可的水曲柳大径级优质新材售价最强能够冲高到5 000元/m3以上,一般材也就能卖到4 500元/m3左右。
根据机器人标定前和标定后的运动学参数分别计算出末端位姿的理论值和标定补偿值。如图6 所示,机器人末端最大位置误差模和平均位置误差模分别从4.272 3 mm 和3.007 5 mm 降低到0.600 2 mm和0.310 7 mm,最大姿态误差模和平均姿态误差模分别从0.019 rad 和0.016 3 rad 降低到0.002 8 rad和0.001 3 rad。
有一年,父亲因为手术后养病,大一放暑假的我第一次扛起铁锹,穿上父亲的雨靴去浇水。从没有打过拦水坝的我站在水中,一次次放土方,可土方一次次被水冲走,最终还是在母亲的帮助下才打好了坝。我精疲力尽地坐在渠沿上,看着被泥水灌湿了的双腿,深深体会到了父亲浇水的不易。

图6 验证点的位姿误差模Fig.6 Norms of position errors of the verification points
5 结论
基于指数积公式的位置标定模型,利用末端3 个参考点位置误差进行运动学参数识别,通过对标定结果的平均化处理和迭代更新,给出了一种间接形式的机器人位姿标定方法。基于UR5 机器人的试验结果表明标定方法能够快速收敛到稳定值,并且能有效地补偿机器人末端位姿误差。该标定思路可用于其他结构形式的串联或并联机器人的位姿标定。