助力型外骨骼行走模式下多关节动力分配仿真分析
2023-12-07陈琦刘放王智政
陈琦,刘放,王智政
(1.西南交通大学 唐山研究生院,河北唐山 063000;2.西南交通大学 机械工程学院,成都 610031)
助力型外骨骼机器人是一种能够穿戴在人体下肢或与人体下肢串联的动力系统,通过人机交互系统预测人体运动意图,以实现对穿戴者的助力,提高人体的运动机能[1-2]。目前外骨骼在军事、医疗、工业等多种领域中均有着广泛的应用[3]。
国外对助力型外骨骼的研究起步较早[4],目前技术比较成熟。在20 世纪60 年代时,美国就已经开始了对外骨骼的研究,Hardiman 外骨骼已经实现了辅助人体举起重物的功能[5]。近年来,Brahmi 等[6]提出了一种基于7 自由度ETS-MARSE 外骨骼机器人的运动学逆解,实现了基于反推的非线性鲁棒控制。日本筑波大学的HAL-5 外骨骼系统最为著名,其外骨骼在运动过程中使用肌电信号传感器检测微弱的肌电信号用以监控佩戴者的行动意图,然后控制驱动部件实现对穿戴者助力活动[7]。近年来,外骨骼的高实用性同时引起了国内学者的关注。文献[8]将被动气弹簧踝关节融入到了下肢外骨骼机器人之中,增加了人机携行性与穿戴舒适性。文献[9]设计了一款并联两自由度球面髋关节外骨骼机构,可以针对腿部运动机能受损的人群进行康复治疗。文献[10]则对人体下蹲-起立动作进行了分析,运用MATLAB 拟合出外骨骼在不同负重情况下关节驱动力矩的变化规律。文献[11]通过利用负重增加外骨骼躯干前倾角度,减小了系统重心的变化范围,从而提高了外骨骼系统的稳定性。文献[12]基于重力势能转化的原理,对下肢外骨骼进行了设计分析,提高了外骨骼的工作效率。
上述学者在下肢外骨骼机器人的研究中取得了多方面的进展。由于目前多数外骨骼系统通过关节驱动来实现对穿戴者的直接助力,所以关节驱动力矩及其功率的变化规律在外骨骼的研究中同样重要。本文通过实验测得人体行走模式下的下肢关节姿态变换规律,并将其作为驱动函数在ADAMS 环境对负重50 kg 的外骨骼虚拟样机进行动力学仿真分析,通过拟合得出外骨骼运动过程中关节力矩以及驱动功率的变化特性。采用人体运动参数为驱动,增加了人机携行性以及穿戴舒适性,可为助力型外骨骼的驱动选择与控制提供可靠参考。
1 人体行走数据采集
1.1 人体运动过程分析及简化
人体是一个复杂的系统,基于人体解剖学,可将人体分为3 种切面:矢状面、额状面与横断面。矢状面将人体分为左、右两部分的纵切面;额状面将人体分为前后两部分的纵切面;横断面将人体分为上下两平面,如图1 所示。经实验研究发现,人体下肢在行走过程中主要依靠髋关节、膝关节与踝关节来维持运动[13]。髋关节与踝关节在矢状面、额状面和横断面中共含有3 个自由度,膝关节仅在矢状面内有屈伸一个自由度[14]。而人体在行走过程中,髋、膝与踝关节的运动主要产生在矢状面中,在额状面与横断面的运动用以维持人体平衡[15]。为简化运动模型,可以忽略额状面与横断面的影响,仅考虑人体下肢关节在矢状面内的运动变化。

图1 人体剖视图Fig.1 Cross-sectional view of the human body
1.2 人体运动姿态角度测试
为了获得人体运动过程中下肢关节姿态变化规律,将成年男性作为实验对象。将位移姿态传感器附着在人体的髋部、膝盖与踝关节处,如图2 所示,对人体行走过程中关节姿态数据进行采集,采样频率为200 Hz。通过测量多组数据后进行分析拟合,得到的关节变化角度曲线如图3 所示。

图2 人体运动参数采集Fig.2 Collection of human motion parameters

图3 下肢关节角度曲线Fig.3 Angle curve of a lower limb joint
2 助力型外骨骼动力学模型建立
2.1 行走过程分析
相较于下蹲、单膝下跪等特殊动作而言,助力型外骨骼行走模式下的动力学分析更为复杂和多变[16],准确的行走模式下动力学模型能够使外骨骼机器人的驱动控制更加精准[17]。
人体下肢运动过程中,存在单腿支撑与双腿支撑两个部分交替运动完成整个行走周期,如图4 所示。基于拉格朗日方程,建立外骨骼动力学模型,为简化实验,将下肢助力外骨骼简化为五杆结构,分别为小腿、大腿与上肢这5 个部分。

图4 行走周期示意图Fig.4 Schematic diagram of walking cycle
2.2 单腿支撑状态动力学建模
单腿支撑状态时,外骨骼一条腿处于支撑状态,为人体提供助力与承担负载;而另外一条腿处于摆动状态,此时其不承担负载,因此可将支撑腿与地面看作为固接状态,建立简易球杆模型,如图5 所示。图5 中:Li为 连杆长度;mi为连杆质量;qi为连杆与竖直方向的夹角。
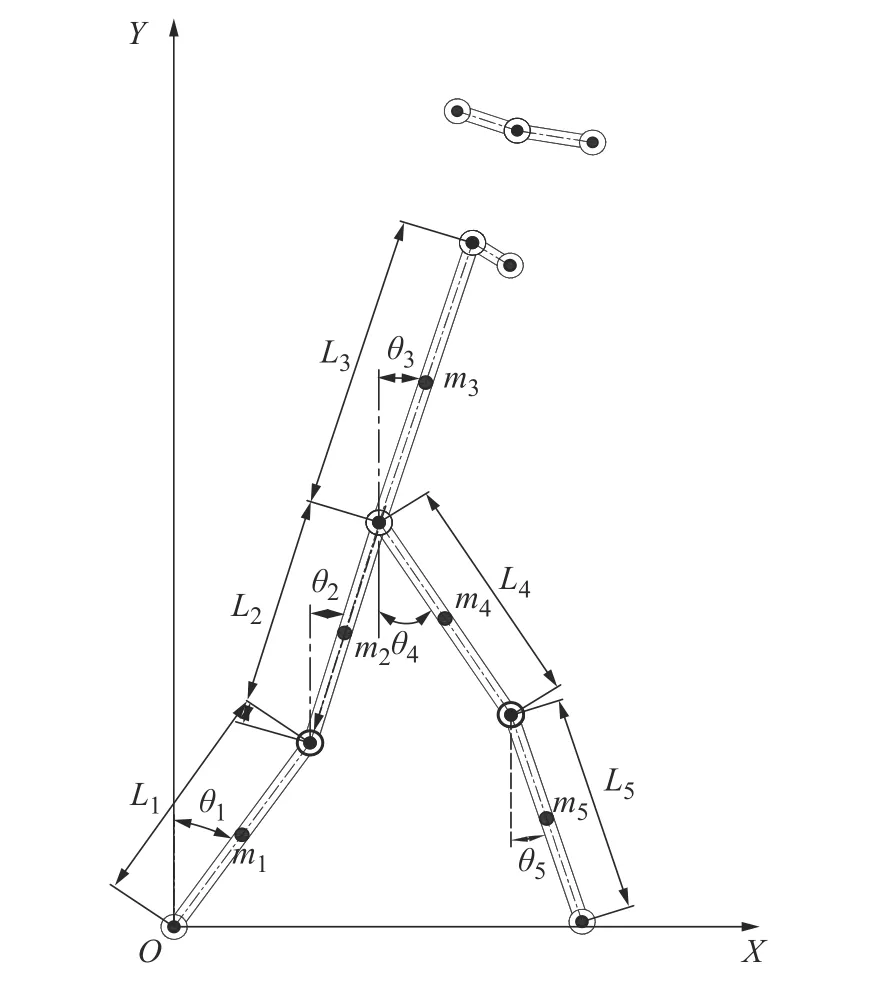
图5 外骨骼单腿支撑模型Fig.5 One-leg support model of exoskeleton.
设支撑腿踝关节转动中心处为世界坐标系的坐标(0,0),则可以得到各连杆质心位置(xci,yci)(i=1,2,···,5,下同)为:
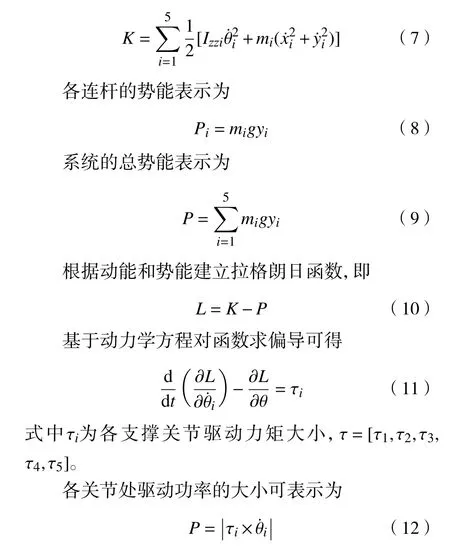
可得外骨骼各连杆动能表示为
式中Izzi为各关节绕质心的转动惯量。
系统的总动能可表示为
2.3 双腿支撑状态动力学建模
在外骨骼处于双腿支撑状态时,双腿同时为穿戴者分担载荷,此时双脚与地面可视为铰接状态,则可以将左右两腿分别视为三杆结构,如图6 所示。

图6 外骨骼双腿支撑模型Fig.6 Two-leg support model of exoskeleton
对于外骨骼行走过程中双腿支撑状态时的动力学建模,将五杆结构分为双三杆结构进行分析。其步骤与单腿支撑过程均相同,运动拉格朗日方程即可求得关节驱动力矩及驱动功率大小。
3 外骨骼结构设计与仿真分析
3.1 外骨骼模型设计
基于西南交通大学第三代人机携行外骨骼(见图7),在SolidWorks 环境下建立下肢外骨骼简化三维模型。整个外骨骼由大腿、小腿、足部以及髋关节组成,将其导入动力学仿真软件ADAMS 中进行仿真分析。

图7 人机外骨骼实物Fig.7 Human machine exoskeleton
3.2 外骨骼模型仿真及分析
仿真分析通过在ADAMS 中设置关节约束、运动副与约束等参数,设置负重为50 kg。由于人体行走过程中,脚部存在脚掌弯曲情况,虚拟样机中会产生误差,所以在虚拟样机中设置脚掌与地面间为固定约束,以减少实验误差。
在仿真过程中,准确的关节驱动函数可以增加仿真结果的可靠性与可信性。仿真通过将测试得到的人体运动过程中下肢关节姿态变化规律作为驱动函数,对外骨骼进行仿真,提高了人机携行性,得到近似真实的仿真结果。
基于仿真得出外骨骼虚拟样机行走模式下的动力学参数,可以观察出运动过程呈现明显的周期性运动,符合人体运动过程。
图8 与图9 为负重50 kg 时外骨骼各关节驱动力矩随时间变化曲线。在运动初期,髋关节与膝关节力矩均不为零,髋关节的驱动力矩最大,达到302.7 Nm,行走时为-271.9 Nm;膝关节驱动力矩达到182.7 Nm,行走时为-177.8 Nm。在运动过程中,髋关节驱动力矩最大,在外骨骼助力过程中,髋关节为外骨骼助力主要动力关节。
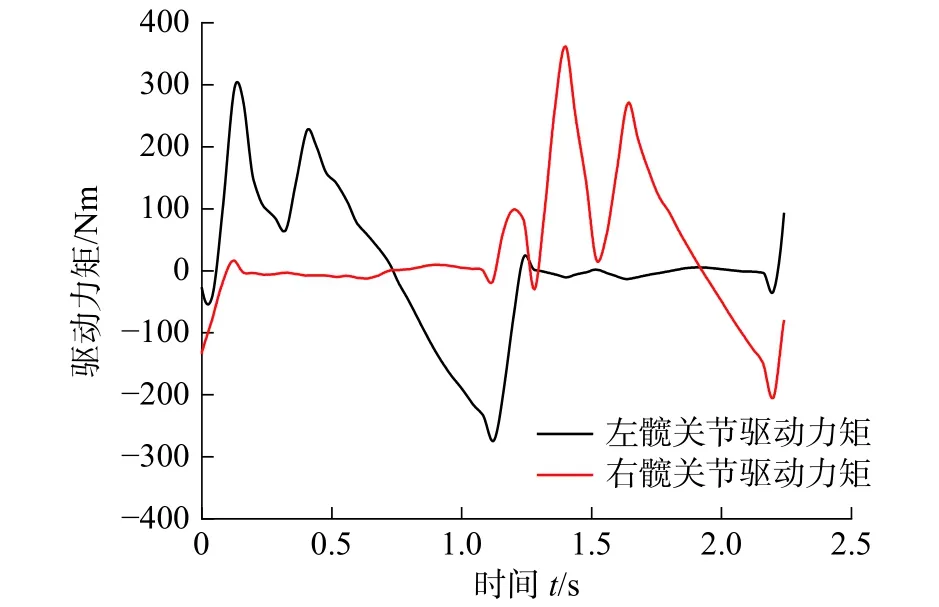
图8 髋关节驱动力矩Fig.8 Driving torque of a hip joint
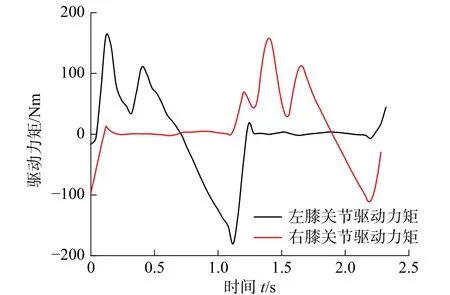
图9 膝关节驱动力矩Fig.9 Driving torque of a knee joint
图10 与图11 为负重50 kg 时外骨骼各关节驱动角速度随时间变化曲线。在运动过程中,髋关节角速度在关节屈曲运动过程中达到最大值,为1.47 rad/s,后伸角速度达到0.96 rad/s。膝关节在关节前屈运动时达到最大值,为2.73 rad/s,后伸角速度达到1.24 rad/s。运动过程中膝关节转动角速度相较于髋关节更大,通过角速度与驱动力矩拟合出关节驱动功率曲线,如图12 与图13 所示。在行走过程中,髋关节驱动功率最高达80.4 W,由于膝关节转动角速度较大,膝关节驱动功率最高达170.6 W,膝关节所需驱动功率较高。

图10 大腿质心角速度Fig.10 Centroid angular velocity of a thigh

图11 小腿质心角速度Fig.11 Centroid angular velocity of a calf

图12 髋关节功率Fig.12 Driving power of a hip joint

图13 膝关节功率Fig.13 Driving power of a knee joint
4 结论
1)通过实验测试得到了人体行走过程中,下肢关节角度变化规律,并在ADAMS 环境中将其作为外骨骼虚拟样机驱动函数,增加了人机携行性与仿真结果的可靠性。
2)基于仿真结果,拟合出了关节驱动力矩、关节驱动功率等曲线。结果显示,在外骨骼运动过程中,髋关节处驱动力矩最大,为外骨骼提供了主要驱动动力;由于膝关节处摆动角速度较大,其驱动功率较高,且大于髋关节处的驱动功率。