全矿井智能视频分析关键技术综述
2023-12-06程德强寇旗旗江鹤徐飞翔宋天舒王晓艺钱建生
程德强,寇旗旗,江鹤,徐飞翔,宋天舒,王晓艺,钱建生
(1.中国矿业大学 信息与控制工程学院,江苏 徐州 221116;2.中国矿业大学 计算机科学与技术学院,江苏 徐州 221116)
0 引言
随着科技的不断进步和应用,智能视频分析在矿业行业中扮演着越来越重要的角色。全矿井智能视频分析技术作为一种应用广泛的技术,可以通过对井下视频数据的采集、处理和分析,实现矿山安全监控、环境保护和设备状态管理等目标[1-3]。其研究目的主要包括以下3 个方面。
1)矿井智能视频分析旨在提高矿井安全性。矿山作业环境复杂多变,存在各种人员安全和设备安全的风险。通过实时监测和分析矿井中的视频数据,可以及时发现和预警不安全行为[4]、危险情况及潜在的事故隐患,帮助管理者采取相应的措施,有效防范事故的发生,最大程度地保障工人的安全。
2)矿井智能视频分析旨在提高生产效率和资源利用效率。通过对矿井内部进行智能化的监控和分析,可以实现对矿井生产过程的全面了解和优化,提高设备的利用率和效能,合理调度和管理资源。同时,通过自动化分析矿井中的数据,可以减少人工干预和错误,提高生产效率,降低成本,为矿山企业带来更大的经济效益。
3)矿井智能视频分析对环境保护和可持续发展具有重要意义。通过对矿井内部环境的监测和分析,可实时掌握矿井的废气排放、水质情况等环境指标,及时发现异常情况并采取相应的措施,减少环境污染的风险,保护周围生态环境。
全矿井智能视频分析涉及多个关键技术领域,包括视频采集与处理技术、视频分析基础技术、高级视频分析技术等。视频采集与处理技术负责获取和预处理井下视频数据,确保数据质量和准确性。视频分析基础技术涉及目标检测与跟踪、运动检测与分析、物体识别与分类等方法,为后续的高级视频分析构建基础。高级视频分析技术包括行为识别与分析、事件检测与警报、视频监控与布防等应用,为矿山安全、环境保护和设备维护提供更高级的功能。
然而,全矿井智能视频分析技术仍面临一些挑战,如视频数据量大、复杂环境下的目标检测与跟踪、高精度的事件识别、处理大规模视频数据的实时性等[5]。因此,通过对关键技术进行深入研究和不断创新,可以进一步提升全矿井智能视频分析技术的性能和效果,为矿山行业的发展和安全提供可靠保障[6]。本文将综述全矿井智能视频分析关键技术的研究现状和发展趋势,旨在为研究者和从业人员提供全面的理论指导和实践参考。
1 视频采集与处理技术
1.1 视频采集设备
视频采集设备在矿井智能视频分析中扮演着重要的角色,其性能和技术水平直接影响矿井内部信息的获取和后续处理。随着科技不断进步,视频采集设备在以下4 个方面取得了显著的研究进展。
1)高清晰度的视频采集已成为视频监控领域的主流趋势。传统的低分辨率视频已无法满足对矿井内部细节的准确捕捉和分析需求。因此,研究者们致力于开发更高分辨率、更清晰、更逼真的视频采集设备,如高清摄像头、红外热像仪等,以提供更多样化的视角和细节信息。
2)视频采集设备的自适应能力得到大幅提升。矿井工作环境具有复杂多变的光照条件,例如强光、弱光、背光等,对视频采集设备的稳定性和画质提出了挑战。现在的研究注重于开发具备自适应调节光照、对比度和曝光等参数的视频采集设备,以确保在各种光照条件下的可靠性和稳定性。
3)视频采集设备的实时性和数据传输速度是当前研究的关键。矿井内部环境变化迅速,需要及时有效地获取和传输视频数据。因此,研究者们致力于提高视频采集设备的帧率和数据传输速度,并探索更高效的数据压缩和传输方法,以满足矿井智能分析系统对实时性的要求。
4)视频采集设备的耐用性和适应性备受关注。矿井工作环境恶劣,存在高温、潮湿、腐蚀等因素,对视频采集设备的材质和结构提出了严格要求。同时,考虑到矿井施工和运作的特殊性,研究者们探索如何设计更灵活、易安装和维护的视频采集设备,以适应不同的矿井布局和工作需求。
通过持续的研究和创新,可以期待未来视频采集设备在分辨率、适应性、实时性、耐久性等方面进一步提升,为矿井安全监控和管理提供更可靠、更高效的技术支持。
1.2 视频预处理
1.2.1 图像去噪
图像去噪技术对于提高视频质量、增强图像细节和减少视觉噪声至关重要。传统的图像去噪方法主要包括基于滤波器的方法和基于统计建模的方法[7-10]。基于滤波器的方法通过应用线性或非线性滤波器来降低图像中的噪声,例如均值滤波、中值滤波、高斯滤波等。基于统计建模的方法根据图像噪声的统计特性,通过建立数学模型进行噪声估计和抑制。这些传统方法可在一定程度上去除图像中的噪声,但存在对细节信息的模糊化和失真风险。
近年来,深度学习技术的兴起极大地推动了图像去噪技术的发展。深度学习模型通过学习大量具有噪声和清晰图像对的训练数据,能够更准确地预测噪声并去除图像中的噪声,同时保留更多的细节信息。基于深度学习的图像去噪方法,如基于卷积神经网络(Convolutional Neural Networks,CNN)方法、基于生成对抗网络(Generative Adversarial Network,GAN)方法等,已经取得了显著成果,并在实际应用中展现出了强大的去噪能力。
除了传统方法和深度学习方法之外,研究人员还在探索结合多种技术手段的图像去噪方法。例如,将图像去噪与超分辨率重建相结合,既能去除噪声,又能提高图像的分辨率和细节还原能力。此外,自适应的图像去噪方法也受到关注,根据图像内容和噪声特性进行参数调整,提高去噪结果的适应性和准确性。
未来,图像去噪技术的研究将继续关注增强算法的鲁棒性、实时性和适应性,以应对更加复杂和多样化的视频预处理需求,为高质量视频的生成和分析提供更强大的技术支持。
1.2.2 图像增强
图像增强技术旨在改善矿井环境下的视频图像质量,提高图像的可视性和细节清晰度,以便对矿井环境进行准确监测和分析。
传统的低质矿井图像增强方法主要包括直方图均衡化、灰度拉伸、滤波[11-13]、小波变换[14-16]、基于Retinex 理论模型[17-19]等。这些方法通过调整图像的亮度、对比度、颜色分布等参数,改善图像的可见性和视觉效果。然而,矿井环境特殊的光照条件,以及灰尘、烟雾等因素的干扰,导致传统方法往往无法满足对低质矿井图像准确增强的需求。
基于深度学习技术的低质矿井图像增强方法正在得到广泛应用。该方法能够有效地改善图像的视觉质量和细节清晰度。
针对矿井环境下的特殊需求,研究人员还探索了一些特定场景下的图像增强技术。例如,在光线不足的情况下,采用图像增强算法结合红外成像技术,提高图像的可见性;在存在灰尘和烟雾干扰的情况下,采用基于物理模型的去除方法,降低干扰影响,并增强图像细节[9]。这些特定场景下的图像增强方法针对性强,能够更好地处理矿井视频图像中的干扰和噪声。
未来,低质矿井图像增强技术研究将继续关注提高增强效果的准确性、稳定性和实时性,以满足矿井环境下对视频图像高质量处理的需求。
1.2.3 图像超分辨率重建
为了解决煤矿井下特殊环境下的图像细节模糊、特征信息丢失等问题,国内外研究机构试图采用高精度的硬件设备来提高传输到终端的图像分辨率。然而,该方法成本极高,且无法解决由于网络传输带宽限制而导致的图像降质问题。为了克服这些问题,图像超分辨率重建算法引起了国内外学者的广泛关注。
图像超分辨率重建方法主要包括插值法[20-24]、重建法[25-28]和学习法[29-31]。插值法包括最近邻域插值法、双线性插值法、双三次插值法等。插值法能够获得平滑的重建图像,但容易受到噪声干扰且容易丢失细节。重建法通过多幅低分辨率图像与未知高分辨率图像之间的特征信息提取和图像重构来提高图像质量,通常情况下可以取得较好的效果,缺点是容易受到先验信息的限制,算法运算速度较慢,不利于部署到实际的工业系统中,且当图像中像素的分布与先验信息的分布不一致时,重建效果不理想。
随着深度学习技术的发展,基于学习的图像超分辨率重建方法备受瞩目,重建效果上明显优于插值法和重建法。学习法的核心在于通过学习图像样本库,获取低分辨率和高分辨率图像之间的映射关系,从而实现图像的超分辨率重建。该方法包括卷积神经网络、生成对抗网络、残差网络、转换器网络等。
在煤矿安全生产视频AI 识别系统方面,研究人员提出了基于深度残差网络和多通道递归残差学习的图像超分辨率重建方法[31]。该方法利用递归方法复用残差网络块,引入交叉学习机制,并采集融合通道的特征信息,实现对落煤口和胶带异物图像的重建,不仅能够解决井下图像像素较低的问题,还能解决图像重建过程中较浅网络容易丢失图像特征信息的问题。
尽管深度学习模拟可取得良好的图像重建效果,但存在庞大的计算量和信息冗余度。因此,如何有效地轻量化深度学习模型,以便在矿井环境中应用,成为未来亟需研究的课题。一种解决方案是设计轻量级的模型架构,例如使用深度残差网络的简化版本或引入轻量级的卷积核结构,在保持较低计算复杂度的同时,尽可能地保持超分辨率重建的准确性和细节保留。另一种方案是采用模型压缩和剪枝技术,通过减少冗余参数和不必要的连接来降低模型的复杂度,从而减少模型的计算负担,提高在资源受限环境下的实时性。此外,深度学习模型的硬件优化也是一个关键方向,针对矿井环境特点进行硬件加速和优化,如对专用的神经网络加速器或嵌入式系统进行优化,可进一步提高模型在矿井中的适应性和效率。
1.2.4 视频稳像
矿井视频电子稳像旨在通过对矿井视频进行实时处理和校正,抑制因矿井工作环境中晃动、震动、振动等因素引起的图像抖动,提高视频的稳定性和可视性。目前,矿井视频电子稳像技术在矿井监控和安全管理领域已得到了广泛研究。
传统的矿井视频电子稳像方法主要包括基于软件的数字稳像和基于硬件的物理稳像2 种。数字稳像方法通过对视频序列进行像素位移和畸变校正,利用图像处理算法实现抖动抑制,并输出稳定的视频图像。物理稳像方法则通过使用机械装置或传感器来实时感知和补偿相机的运动,使得图像始终保持稳定。
随着计算机视觉和图像处理技术的快速发展,基于深度学习的矿井视频电子稳像方法取得了重要进展。深度学习模型可以通过学习大量具有抖动和稳定图像对的训练数据,自动提取特征并预测图像中的抖动偏移量,从而实现更精确的图像稳定,有效抑制图像抖动,并生成稳定的视频结果。
研究人员正探索利用惯性传感器、光流估计、图像对齐等技术来提高矿井视频电子稳像的效果。惯性传感器可以感知相机的姿态变化和加速度信息,并根据这些信息进行实时的抖动补偿。光流估计技术能够估计图像中的运动场景,并通过位移校正算法进行抖动补偿。图像对齐技术通过对多帧图像进行配准和叠加来抑制图像抖动,提高视频的稳定性。
从传统的数字稳像方法到基于深度学习的稳像技术,不断提高对矿井视频抖动的准确补偿能力,并提供更稳定、清晰的视频图像。未来的研究将进一步关注实时性、稳定性、适应性等方面,以满足在复杂矿井环境下对视频稳定性的要求。
1.3 视频压缩与编码
视频压缩与编码技术旨在将视频信号进行压缩,以减小存储空间和传输带宽需求,并保持尽可能高的图像质量。矿井视频数据往往具有大量的冗余信息,如静止背景和重复运动,因此,矿井视频压缩与编码是减少存储和传输成本、保证图像质量的关键技术。
传统的视频压缩与编码方法主要基于离散余弦变换(Discrete Cosine Transform,DCT)和运动补偿技术。DCT 能够将图像转换为频域系数,通过舍弃高频系数实现压缩。运动补偿利用帧间的时间和空间相关性,对视频中的运动进行建模和预测,从而减少冗余信息,进一步提高压缩效率。常见的编码标准包括MPEG-2、H.264/AVC、HEVC 等。
目前,针对矿井视频压缩与编码的研究主要集中在高效压缩算法和针对矿井环境特点的优化2 个方面。对于高效压缩算法,研究人员致力于开发更适用于矿井视频的压缩方法。传统的视频编码标准存在压缩比不高、计算复杂度大等问题。因此,一些专门针对矿井视频的压缩算法被提出,如基于运动补偿和变换编码的方法,利用矿井视频的运动特征和频域特性进行高效压缩。在针对矿井环境特点的优化方面,研究人员考虑矿井视频存在低光照、强噪声、快速运动等而影响视频质量和压缩效果的问题,提出了可变帧率控制、自适应量化、滤波算法等一系列优化方法,以适应矿井环境的特殊需求,提高视频的压缩性能和图像质量。
随着深度学习技术的发展,研究人员开始将其应用于矿井视频的压缩和编码。深度学习模型可以通过大量的训练数据进行图像特征学习和重构,提高视频的压缩效率和视觉质量,例如,基于CNN 的视频编码器[32]被用于提取时间和空间特征,从而实现更高效的压缩和重构。
2 视频分析基础技术
2.1 目标检测与跟踪
2.1.1 目标检测算法
矿井视频目标检测的目的是在复杂的矿井环境中准确、高效地检测和识别矿井中的目标物体,如人员、设备等,以提升矿井的安全性和管理效率。目前,针对矿井视频目标检测的研究涉及以下4 个方面。
1)数据集构建与标注。矿井视频目标检测需要构建大规模的矿井视频数据集,并进行目标标注。该过程涉及到采集真实矿井视频数据、标定目标边界框及标注目标类别等工作。目前已有一些公开的矿井视频数据集,但规模相对较小,仍需要进一步完善。
2)目标检测算法。针对矿井视频中的目标检测任务,研究人员主要探索和优化不同的目标检测算法。传统的目标检测算法,如基于特征提取的方法(如Haar 特征[33-34]、HOG 特征[35]等)和基于机器学习的分类器(如支持向量机、随机森林),应用于矿井视频中存在鲁棒性和检测准确性的限制。近年来,深度学习技术尤其是CNN 的发展,为矿井视频目标检测提供了新的解决方案,如基于Faster R-CNN[36-37]、YOLO[38-39]和SSD(Single Shot MultiBox Detector )[40-41]等网络结构的目标检测方法取得了较好效果。
3)矿井环境下的挑战。矿井视频目标检测面临诸多挑战,如低光照、强噪声、运动模糊等。这些因素会导致目标物体边界不清晰、目标形态变化大等问题,进一步增加了目标检测难度。为应对这些挑战,研究人员需针对矿井环境的特点进行优化,包括采用图像增强方法、引入特殊的网络结构、设计适应矿井环境的数据预处理等措施,以提升目标检测的鲁棒性和准确性。
4)实时性与计算效率。矿井视频目标检测需要在实时性和高效性上有很好的表现,以满足矿井管理的要求。因此,研究人员致力于减少算法的计算复杂度和优化模型的推理速度。这包括结合硬件加速技术(如GPU、FPGA 等)、网络剪枝和轻量化设计等方法,以实现在资源有限的嵌入式设备上进行实时目标检测。
矿井视频目标检测研究正处于不断发展和完善的阶段。未来将进一步关注矿井环境下的目标检测问题,提出更加鲁棒、高效的算法,并结合其他技术,如目标跟踪和行为识别等,实现更全面的矿井视频智能监测与管理。
2.1.2 目标跟踪算法
矿井视频目标跟踪是指在矿井环境下对目标进行连续追踪和定位的技术,主要用于实时监测和管理矿井中的人员和设备。目前,针对矿井视频目标跟踪的研究涉及以下4 个方面。
1)目标表示与特征提取。矿井视频中的目标通常受限于低光照、噪声等因素,而且目标形态和外观变化较大,因此需采用有效的目标表示方法。研究人员通常使用深度学习方法[42-44],如CNN、循环神经网络(Recurrent Neural Network,RNN),提取目标的空间和时间特征,以识别和跟踪目标。
2)运动建模与目标预测。针对矿井视频中目标的运动特点,研究人员通过建立运动模型来预测目标的轨迹。常用的方法包括基于卡尔曼滤波器[45]和粒子滤波器[46]的目标状态估计,以及基于长短期记忆网络(Long Short Term Memory,LSTM)[47]的目标预测模型。这些方法可以在局部信息不完整的情况下对目标进行准确的跟踪和预测。
3)多目标跟踪与目标重识别。在矿井视频中,可能存在多个目标同时出现和移动的情况,因此需要实现多目标的并行跟踪。研究人员通过设计多目标跟踪算法,结合目标的特征相似性、运动关系等信息,实现对多个目标的准确跟踪和区分。同时,为了应对目标遮挡和丢失等问题,引入目标重识别技术来提高多目标跟踪的鲁棒性和连续性。
4)实时性与计算效率。矿井视频目标跟踪需要在实时性和计算效率上有较好的表现,以满足矿井监测和管理的要求。为此,研究人员致力于优化跟踪算法的计算复杂度,采用轻量化网络结构和快速推理算法。此外,结合硬件加速技术(如GPU、FPGA)和分布式计算等方法,进一步提升目标跟踪的实时性和计算效率。
矿井视频目标跟踪是一个具有挑战性的任务,目前的研究着重于目标表示、特征提取、运动建模和目标预测、多目标跟踪、目标重识别等关键技术。未来的研究将进一步关注矿井环境下的目标跟踪问题,并结合其他技术,如目标检测和行为分析等,实现更全面、准确、高效的矿井视频智能监测与管理。
2.2 运动检测与分析
2.2.1 光流法
光流法是一种计算机视觉中常用的技术,用于分析图像序列中像素的运动模式和速度。其基于光学流体力学的概念,通过计算图像中像素的亮度变化来推断像素之间的运动。光流法主要包括向量计算和特征提取两类方式。
1)光流向量计算。光流法的核心是计算光流向量,它表示了图像中每个像素点在时间上的位移。光流向量可以通过2 帧图像之间的亮度变化来估计,常用的方法包括基于亮度梯度的方法(如Lucas-Kanade 光流法)和基于相关性的方法(如Horn-Schunck 光流法)。这些方法通过求解光流方程或优化问题来计算光流向量。
2)光流特征提取。除了光流向量,光流法还可以提取其他类型的特征,以描述像素的运动模式。例如,光流场表示了整个图像区域的光流向量分布,可以用于分析全局的运动模式。另外,基于光流的密集采样方法可以提取密集的光流特征,用于目标检测、跟踪和姿态估计等任务。
基于光流法的矿井视频运动检测和分析[48-50]已经在矿业领域得到了广泛应用,但仍然面临一些挑战,如复杂背景与光照变化、镜头抖动和运动、大规模数据处理、异常运动检测等。克服这些挑战需要综合运用计算机视觉、深度学习和数据处理等领域的技术,并结合矿业领域的专业知识和经验。进一步的研究和创新将有助于提高基于光流法的矿井视频运动检测和分析技术的性能和应用效果。
2.2.2 基于背景建模的方法
背景建模是一种常用的计算机视觉技术,用于从视频序列中提取静态背景信息,以便将动态目标与背景进行区分。基于矿井视频的背景建模主要有以下4 种方法。
1)基于统计的方法。这是最早和最常见的背景建模方法之一。其假设背景像素的灰度值在时间上是稳定的,而前景目标的灰度值则发生变化。常用的统计方法包括高斯混合模型(Gaussian Mixture Model,GMM)[51-52]和自适应背景模型[53]。这些方法通过建立像素的灰度值分布模型来区分前景和背景。
2)基于差异图像的方法。该方法通过比较当前帧图像与背景模型之间的差异来提取前景目标。差异图像可以通过像素级或区域级的比较得到。常见的差异图像方法包括帧间差分(Frame Difference)、绝对差分(Absolute Difference)、积分图像(Integral Image)等。
3)基于像素分类的方法。该方法将每个像素视为一个独立的分类器,通过分析像素的空间、时间特征来判断其是否属于背景或前景。常见的像素分类方法包括基于贝叶斯分类器(如贝叶斯最小风险分类器)和基于支持向量机的分类器。
4)基于深度学习的方法。随着深度学习技术的发展,越来越多的基于神经网络的方法被应用于背景建模。这些方法通过使用CNN 或RNN 等结构来学习视频序列中的动态背景信息,通常需要大量的标注数据和计算资源。
基于背景建模的方法是矿井视频中运动检测和分析的常用技术之一,但也面临一些挑战,如:动态背景和光照变化、目标遮挡和交叉、参数选择和自适应性等。克服这些挑战需要进一步改进和创新背景建模方法,如适应性背景建模、多模态背景建模等。此外,结合其他传感器数据和专家领域知识也可以提高运动检测和分析的性能。
2.3 物体识别与分类
2.3.1 特征提取与描述
特征的提取和描述用于表示矿井图像或视频中的关键信息,以便进行目标检测、分类等任务。特征描述是对提取到的特征进行编码或描述的过程,以便进行后续的匹配或分类。
常见的矿井图像和视频特征提取方法包括:①基于颜色的特征提取,即从图像中提取颜色直方图、颜色矩、颜色空间特征等。② 基于纹理的特征提取,即提取图像中的纹理信息,如局部二值模式(Local Binary Patterns,LBP)[54]、方向梯度直方图(Histogram of Oriented Gradients,HOG)[35]等[55-59]。③基于形状的特征提取,如边缘检测、角点检测、轮廓描述子等。④ 基于深度学习的特征提取,其使用CNN 或预训练模型(如ResNet、Inception 等)提取高级语义特征。
常见的矿井图像和视频特征描述方法包括:①尺度不变特征变换(Scale-Invariant Feature Transform,SIFT),其通过检测关键点,计算关键点周围的局部特征描述子,具有旋转、尺度和光照不变性。② 加速稳健特征(Speeded Up Robust Features,SURF),其类似SIFT,但使用了更快的特征提取和描述算法。③HOG,其将图像分成小的局部块,计算每个块的梯度直方图作为特征描述子。④ LBP,其计算图像中每个像素与其邻域像素的二值编码,并将编码串联形成特征描述子。
矿井视频和图像特征提取和描述仍面临一些挑战,如复杂背景和噪声、高效性和实时性、动态目标和遮挡等。为了克服这些挑战,需将传统的特征提取方法和基于深度学习的方法结合,设计适应矿井环境的特征表示和描述算法。同时,对于特定的矿井视频应用场景进行特征选择和优化。
2.3.2 分类器设计与训练
分类器设计与训练是机器学习中的重要任务,用于将输入数据分为不同的类别或标签。基于矿井视频的分类器设计和训练主要包含以下5 个步骤。
1)选择分类器算法。根据任务和数据的特点,选择合适的分类器算法。常见的分类器算法包括决策树、支持向量机、朴素贝叶斯、逻辑回归、随机森林、神经网络等。每种算法都有其优势和适用场景,合适的算法可以提高分类器的性能。
2)模型训练。使用准备好的训练数据集对选择的分类器算法进行训练。训练过程中,分类器将根据输入样本特征和标签之间的关系,调整模型的参数或权重,以使模型能够准确地对未知样本进行分类。
3)参数调优。在训练过程中,可以通过交叉验证、网格搜索等技术来调优分类器的参数,以提高分类器的性能和泛化能力。参数调优的目标是找到最佳的参数组合,使分类器在未知数据上的表现最优。
4)模型评估。训练完成后,需要对分类器的性能进行评估。常用的评估指标包括准确率、精确率、召回率、F1 值、ROC 曲线和AUC 等。通过评估分类器的性能,可以了解其在不同类别上的表现,并进行性能比较和选择。
5)模型调优和迭代。根据评估结果,对分类器进行调优和迭代。例如,可以调整特征工程的方法、分类器算法的选择、参数的设置等,以进一步改善分类器的性能。
矿井视频分类器设计与训练是实现目标识别、行为分析等任务的关键步骤。目前,矿井视频分类方式仍面临很多困难,如样本不平衡、环境的复杂性和不确定性、视频数据的标注和采集的耗时性和专业性等。对此,需要进一步改进分类器的设计和训练方法,包括解决样本不平衡问题、利用数据增强技术、引入领域知识和专家经验等。此外,多模态数据的融合和迁移学习等方法也可用于提高分类器的性能。
3 高级视频分析技术
3.1 行为识别与分析
3.1.1 动作识别与行为建模
矿井视频的动作识别和是计算机视觉和机器学习领域中的重要任务,其涉及对矿井视频、图像或传感器数据中的人类行为进行自动化识别、分类和分析。常见的矿井视频动作识别和行为建模方法如下。
1)基于手工设计特征的方法。该方法使用计算机视觉技术从视频或图像中提取手工设计的特征,如光流、颜色直方图、纹理特征等,然后使用传统的机器学习算法,如支持向量机、随机森林[60]等进行行为分类和识别。
2)基于轨迹分析的方法。该方法将行为识别转换成对人物轨迹数据的分析过程,通过分析人物的运动轨迹、速度、方向等特征进行行为分类和识别。
3)基于CNN 的方法。CNN 在图像和视频处理任务中取得了巨大成功,可以用于行为识别和分析[61-64]。通过将视频帧或图像序列作为输入,CNN可以学习到高级特征并进行行为分类和识别。
4)基于RNN 的方法。RNN 适用于处理时序数据,可以捕捉行为序列中的时间依赖关系。通过将行为序列作为输入,RNN 可以对行为进行建模和分类。LSTM 是一种特殊类型的RNN,能更好地处理长期依赖关系[65],在行为识别和分析任务中常用于建模和预测序列中的行为。
5)基于多模态融合的方法。将来自不同传感器的数据(如视频、语音、惯性传感器等)进行融合,以提高行为识别和分析的准确性和鲁棒性。结合空间和时间信息,对行为进行建模和分析,如使用3D CNN[66]对时空体积进行建模。
6)基于强化学习的方法。强化学习可以用于学习行为策略和决策,通过与环境的交互来优化行为识别和分析的性能。例如,可使用强化学习来学习智能体在视频中的行为策略,以最大化累计奖励。
7)基于注意力机制的方法。注意力机制可帮助模型聚焦于关键的空间或时间区域,从而提高行为识别和分析的性能[62]。通过注意力机制,模型可以自动学习并关注与行为相关的重要特征。
矿井视频的动作识别和行为建模是对视频中人员或设备的行为进行理解和描述的关键任务。传统方法对于复杂的矿井环境和多样化的行为表现有限。近年来,基于深度学习的方法在动作识别和行为建模中取得了显著进展,但仍面临着技术上的诸多挑战,如复杂背景和噪声、视角和尺度变化、矿井环境中的人员和设备行为具有多样性和复杂性等。对此,需进一步研究和开发针对矿井视频的动作识别和行为建模方法。此外,数据增强、半监督学习和迁移学习等方法也可以用于提高动作识别和行为建模的性能。
3.1.2 行为异常检测
行为异常检测是指通过对个体或系统的行为进行观察和分析,识别与正常行为模式相悖的异常行为。常见的矿井视频行为异常检测方法包括以下4 种。
1)统计方法。该方法是最常用的行为异常检测方法之一。它基于对数据的统计分析,利用概率模型或统计指标来判断观测到的行为是否与正常行为模式相符。例如,可以使用均值和标准差来检测与平均行为差异显著的异常行为。
2)机器学习方法。该方法通过训练算法来学习正常行为模式,并根据学习到的模型对新的行为进行分类和判断。常用的机器学习算法包括支持向量机、决策树、随机森林等[35,67-68]。这些算法可以根据已有的标记数据(正常和异常行为的标签)进行监督学习,也可以使用未标记数据进行半监督或无监督学习。深度学习方法在行为异常检测中也取得了显著的进展。深度学习模型,如深度神经网络(Deep Neural Networks,DNN)、CNN、RNN 等[69-73],可以从大规模数据中学习到复杂的特征表示。这些模型可以捕捉到更抽象和高级的行为特征,提高异常检测性能。
3)基于规则的方法。该方法使用事先定义的规则或专家知识来检测异常行为。这些规则可以基于领域知识和经验,描述正常行为的特征和限制,并根据违反规则的程度判断行为是否异常。该方法通常需要领域专家的参与,且对规则的设计和维护比较耗时。
4)异常度量方法。该方法通过将观测到的行为与正常行为模式进行比较,计算出异常度量值来判断行为是否异常。常用的度量方法包括马氏距离、欧氏距离、K 近邻等。异常度量方法可以根据具体情况进行调整和优化,以提高检测性能。
矿井视频的行为异常检测是识别和检测视频中异常行为或事件的关键任务。近年来,基于深度学习的方法在行为异常检测中取得了显著进展,并通过比较实际行为与学习到的行为模型之间的差异来检测异常行为。但该任务仍面临环境的多样性和复杂性、样本的多样性和复杂性、系统的实时性要求等挑战。未来的研究方向包括利用弱监督学习和半监督学习方法来解决数据标注的问题,结合多模态数据和上下文信息来提高异常检测的性能,以及引入迁移学习和增量学习等方法来适应不同矿井环境和场景。
3.2 事件检测与警报
3.2.1 关键事件定义与描述
关键事件是指在某个过程、系统或领域中,对整体发展和结果具有显著影响的重要事件。这些事件通常具有突出的时空特征、决定性的作用,并且对于理解过程的演变和结果的形成具有重要意义。对关键事件的描述可以从多个维度进行,包括时间、空间、因果关系和影响等。
1)时间。关键事件的描述中通常包括事件的发生时间、持续时间和顺序。这有助于建立事件发展的时间轴,揭示事件之间的时间关系和演化过程。
2)空间。关键事件的描述涉及事件发生的空间范围和位置,包括地理位置、空间分布图及事件在不同地点之间的关联等,以帮助理解事件的空间特征和相互作用。
3)因果关系。关键事件的描述应涉及事件之间的因果关系,包括事件之间的直接或间接影响、相互作用和驱动力,以及事件之间的因果链条和反馈循环等,有助于揭示事件之间的关系网络。
4)影响。关键事件的描述需要考虑事件对整体系统或领域的影响。
3.2.2 事件检测与识别算法
矿井视频的事件检测与识别算法是指在数据流或时间序列中自动检测和识别特定事件的算法。常见的矿井视频事件检测与识别算法可分成以下5 种。
1)基于规则的方法。该方法使用预定义的规则或规则集来检测和识别特定事件。规则可以基于领域专家的知识或经验,且需要手动定义和调整。该方法的优点是易于理解和解释,但对于复杂的事件或行为可能需要大量的规则,且难以适应新的或未知的事件模式。
2)基于机器学习的方法。该方法利用机器学习算法从数据中学习事件模式并进行检测和识别。常用的机器学习方法包括监督学习、无监督学习和半监督学习。监督学习方法使用已标记的训练样本来建立事件模型,然后对新数据进行分类。无监督学习方法从无标记的数据中发现事件模式,然后进行聚类或异常检测。半监督学习方法则结合有标记和无标记的数据进行事件识别。机器学习方法可以自动从数据中学习事件模式,适应性较强,但需要大量的标记数据和适当的特征工程。
3)基于深度学习的方法。该方法利用深度神经网络模型来学习和表示事件模式。常用的深度学习模型包括CNN[74]、RNN 和变换器(Transformer)。深度学习方法具有强大的表达能力和自动特征学习能力,可以处理大规模和复杂的数据,但需要大量的标记数据和计算资源。
4)基于图模型的方法。该方法将事件检测和识别问题建模为图结构,利用图模型进行推断和学习。常用的图模型包括隐马尔可夫模型(Hidden Markov Model,HMM)、条件随机场(Conditional Random Field,CRF )和图卷积网络(Graph Convolution Network,GCN)。图模型可以建模事件之间的关系,适用于序列数据和关系图数据。
5)基于集成方法的方法。该方法通过将多个单一算法的结果进行集成来提高事件检测和识别的性能,常用的有投票法、加权平均和堆叠法。集成方法可以充分利用不同算法的优势来提高整体性能。
矿井视频的事件检测和识别是用于分析和识别视频中的事件信息和事件顺序的关键任务。未来的研究方向包括结合深度学习和传统方法,利用多模态数据和上下文信息来提高事件检测和识别的性能,引入时空建模和时序注意力机制等方法来捕捉时间和事件的动态特征,以及利用增量学习和迁移学习等方法来适应不同矿井环境和场景。此外,设计具有可解释性和可视化能力的算法也是一个重要的方向,可帮助用户理解和分析事件信息和事件顺序。
3.3 视频监控与布防
3.3.1 监视区域划定与配置
在矿井视频监控与布防系统中,监控区域的划定与配置是一个关键步骤,决定了监控系统的有效性和覆盖范围。常用的监控区域划定与配置方法如下。
1)风险评估。对目标区域进行全面的安全风险分析,考虑潜在的威胁、脆弱点和重要目标,确定关键区域和高风险区域。这有助于确定需要特别关注和强化监控的区域。
2)任务需求分析。根据监控系统的任务需求,明确监控的目标。例如,确定是否需要监控入口和出口、停车场、安全通道等。这有助于确定监控区域的范围和位置。
3)地理布局与平面图分析。通过研究目标区域的地理布局,确定监控设备的位置和布局。考虑到场地的地形、建筑物结构和环境特点,选择适当的监控点位和摄像头的安装位置。确保监控设备能够有效地监视关键区域,并提供清晰的视野。
4)支持设备选择。根据监控区域的特点和需求,选择合适的监控设备和技术。考虑到光线条件、距离、视野角度等因素,选择合适的摄像头类型(如固定摄像头、云台摄像头、红外摄像头等)及其他传感器设备(如烟雾探测器、门禁系统等)。
5)网络和存储规划。确定监控设备的网络布局和存储需求。考虑监控设备之间的连接、带宽要求和数据存储需求,规划合适的网络架构和存储系统。确保监控数据的传输和存储满足系统要求。
6)实地验证和优化。在实施之前进行实地验证和优化。通过实地考察和测试,确认监控设备的位置和视野是否满足预期需求。根据实际情况进行必要的调整和优化,以确保监控区域的覆盖范围和效果最佳。
矿井视频监控区域的划定与配置是确定矿井中需要进行视频监控的区域,并进行合理的摄像头配置和布局。但矿井环境通常复杂多变,数据的获取和传送的实时性要求高,视频监控涉及到敏感信息和隐私问题是其面临的挑战。对此,可利用目标检测、跟踪和场景分析等方法来辅助监控区域的划定与配置,引入自适应和智能化的算法来适应不同的矿井环境和场景,并考虑隐私保护和数据安全的机制和方法。
3.3.2 视频分析与警报响应
矿井视频监控与布防系统中的视频分析与警报响应是关键的安全管理组成部分,用于实时监测和检测潜在的安全威胁,并采取适当的行动。视频分析和警报响应相互补充,共同构建一个智能化的安全监控系统。
矿井视频分析是指对监控摄像头捕获的视频数据进行智能化处理和分析。该技术的发展使得监控系统能够更加高效地处理大量的视频数据,从而实现以下功能。
1)目标检测和识别。目标检测技术用于自动检测视频中的特定目标,如人、车辆或物体。通过目标识别,系统可以对目标进行分类和识别,从而实现对不同类型目标的监测和分析。
2)行为分析。行为分析技术用于分析目标的动作和行为,以识别出潜在的异常行为。例如,识别人员闯入禁区、物体被盗或异常移动等。行为分析可以通过建立行为模型和规则来实现。
3)运动跟踪。运动跟踪技术用于在视频序列中跟踪目标的运动轨迹。通过运动跟踪,系统可以实时监测目标的运动状态,从而提供有效的目标追踪和监测能力。
警报响应是系统根据视频分析结果自动发出警报并采取相应措施的过程。警报响应的目标是实现对安全事件的及时识别和快速响应,以保障安全和减少潜在损失。常见的警报响应有以下3 种方式。
1)实时警报。基于视频分析结果,系统可以实时生成警报,如声音警报、闪烁警示灯等,以吸引操作员的注意力。实时警报可以帮助操作员快速察觉安全事件,并及时采取行动,若操作人员操作失当,软件会发出实时警报。
2)警报通知和报警中心。当发生安全事件时,系统可以自动触发警报通知,如短信、电子邮件或推送通知,将事件信息发送给相关人员。同时,系统还可以与报警中心或安全监控中心进行联动,以实现更全面的响应和处理。
3)自动联动控制。警报系统可以与其他安全设备或系统进行联动控制,如自动锁定门禁、触发喷水灭火系统等。自动联动控制可以加强对安全事件的应对能力,并减少人为干预的延迟。
4 全矿井智能视频分析应用
笔者所在团队自主研发了一个泛联兼容的矿山智脑AI 视觉智能服务平台,如图1 所示。该平台集成了视频识别分析和工业联动控制等功能,由通用数字摄像仪、AI 智能摄像仪、控制主机、智能分析装置、远程控制设备等构建而成。该平台实现了视频机器视觉识别与工业控制的深度融合,能够识别人员行为,监测矿井环境和设备状态,并自动保护停机和智能调速控制主要生产设备,实现安全节能目标。
4.1 智能视频分析在智能探放水和探放瓦斯中的应用
矿山智脑AI 视觉智能服务平台的打钻管理界面如图2 所示。利用智能视频分析技术进行打钻过程监控与管理,可提高智能探放水和探放瓦斯的准确性、效率,并有助于提前识别和处理矿井中的水患和瓦斯隐患,降低事故风险,保障矿工的生命安全和矿井的可持续经营。

图2 打钻管理界面Fig.2 Drilling management interface
1)智能探放水。通过分析视频图像中的地质构造、水流特征等,可以判断矿井中的水源位置、水流方向及水位变化情况。基于这些信息,可以自动调节探水钻机的位置和参数,实现精确的探放水作业,并提前预警可能的水患风险。
2)智能探放瓦斯。通过分析视频图像中的瓦斯特征,如瓦斯泡沫、瓦斯涌出等,可以实时监测矿井中的瓦斯积聚和释放情况。基于这些信息,可以自动调节探放瓦斯设备的位置和参数,及时探测和排除瓦斯隐患,确保矿井安全运行。
4.2 智能视频分析在煤岩识别与截割中的应用
利用智能视频分析技术可以提高煤岩识别的准确性和效率,实现煤岩截割的自动化和安全化。
1)煤岩识别。通过分析视频图像中的颜色、纹理、形状等特征,实时判断图像中的区域是煤层还是岩层,从而帮助操作员准确判定煤岩的位置和分布[75],为后续截割提供准确的目标区域。矿山智脑AI 视觉智能服务平台的煤岩识别结果如图3 所示。

图3 煤岩识别界面Fig.3 Coal-rock recognition interface
2)截割位置控制。通过分析视频图像中的煤岩边界和截割机械的位置关系,可以实时调整截割机械的位置和角度,确保截割刀具准确地切割煤岩,提高截割效率和质量。
3)截割进度监测。通过分析视频图像中的截割机械动态、煤岩消失情况等特征,可以实时监测截割进度并生成相应的报告,帮助管理人员了解作业的状态和进展情况。
4)煤岩质量评估。通过分析视频图像中的煤岩特征,如颜色、纹理等,可以实时监测煤岩的质量,并根据预设的标准进行分类和分级,帮助操作员调整截割参数和优化煤岩品质。
4.3 智能视频分析在掘进工作面作业中的应用
利用智能视频分析技术可以提高掘进工作面作业的自动化程度、生产效率和安全性。
1)钻机参数优化。通过分析视频图像中的钻机工作状态、岩屑排除情况等特征,可以实时监测钻机的工作状况,并根据预设的参数范围进行优化调整,提高钻掘效率和质量。钻场智能管理子系统识别界面如图4 所示。

图4 钻场智能管理子系统识别界面Fig.4 Recognition interface of intelligent drilling field management subsystem
2)掘进进度监测。通过分析视频图像中的掘进动态、岩层移动等特征,可以实时监测掘进进度并生成相应的报告,帮助管理人员了解工作面的状态和进展情况。
3)安全监测与预警。通过分析视频图像中的安全隐患,如岩层变形、顶板下沉等,可以及时发出警报,并提供相应的安全措施,保障人员和设备的安全。掘进进度监测和安全预警界面如图5 所示。

图5 掘进进度监测和安全预警界面Fig.5 Tunneling monitoring and safety pre-alarming interface
4.4 智能视频分析在综采工作面作业中的应用
利用智能视频分析技术,可以提高综采工作面作业的自动化程度、生产效率和安全性。
1)采煤进度监测。通过分析视频图像中的采煤动态、煤层移动等特征,可以实时监测采煤进度并生成相应的报告,帮助管理人员了解工作面的状态和进展情况。
2)煤炭质量评估。通过分析视频图像中的煤炭特征,如颜色、形状等,可以实时监测煤炭质量,并根据预设的标准进行分类和分级,帮助操作员调整采煤参数和优化矿石品质。
3)设备状态监测与故障诊断。通过分析视频图像中的设备运行状态、振动特征等,系统可以实时监测设备的工作状况,及早发现潜在故障,并提供故障诊断和维护建议,以减少停机时间和提高系统的可靠性。
4)安全监测与预警。通过分析视频图像中的安全隐患,如岩层变形、顶板下沉等,系统可以及时发出警报,并提供相应的安全措施,保障人员和设备安全。综采工作面作业安全监测与预警界面如图6 所示。

图6 综采工作面作业安全监测与预警界面Fig.6 Safety monitoring and pre-alarming interface of fully mechanized working face
4.5 智能视频分析在煤流运输系统中的应用
利用智能视频分析技术,可以提高煤流运输系统的生产效率和安全性,有助于优化运输过程并改善煤矿工作环境和安全条件[76-79]。
1)煤炭流量监测与计量。通过分析视频图像中的煤炭流动特征,如速度、密度等,实时监测和估算煤炭的流量,并提供准确的计量数据,用于生产管理和结算核算。
2)异常检测与预测维护。为了实现区域的闭合管理和安全控制,在指定区域的电子围栏和危险区域的所有出入口安装摄像仪,对进出人员进行统计,实现区域的闭合管理。当超员发生时会触发报警,并输出控制命令以闭锁作业设备。通过分析视频图像中的载重状态和物体形状,可实时监测和估算负载质量,并根据重心位置提供相应的控制建议,对胶带进行精准调速,以减少设备磨损和降低能耗;识别胶带转载点堆煤,胶带大块、锚杆、水煤、异物,胶带跑偏,胶带撕裂,胶带架倒架等异常,报警并控制胶带保护停机。煤流运输系统异常检测与预测维护界面如图7 所示。

图7 煤流运输系统异常检测与预测维护界面Fig.7 Abnormal detection and predictive maintenance interface of coal transport system
4.6 智能视频分析在矿井提升机系统中的应用
采用智能视频分析技术完成提升机首尾绳状态分析、检测及预警功能,可替代人工查绳。首绳损伤检测包括直径变化、捻距变化、钢丝绳外部损伤(断丝、磨损、锈蚀)等;尾绳状态监控包括尾绳摆动异常、尾绳脱落、尾绳散股、尾绳缠绕等。矿井提升机状态监测界面如图8 所示。

图8 矿井提升机状态监测界面Fig.8 Status monitoring interface of mine hoist
4.7 智能视频分析在辅助运输系统中的应用
将智能视频分析技术应用于辅助运输系统(如单轨吊、架空乘人装置等)中,可提高运输过程的自动化水平、安全性和效率,有助于优化运输过程、降低事故风险,并提高辅助运输的准确性和效率。
单轨吊在运行过程中通常存在人员误入单轨吊运行路径、未按照要求进入硐室躲避等安全隐患,且单轨吊司机在疲劳驾驶或注意力不集中时,在发现人员闯入时无法快速响应和闭环处理,导致其在运输货物、材料等过程中发生碰撞、积压甚至致人伤亡事故。采用智能视频分析技术,通过设计目标检测与识别神经网络模型,通过不断学习和判断,自动识别人员闯入单轨吊行使路径的危险状况,并及时语音报警提醒,当距离达到一定情况仍未制动时,发出控制信号控制单轨吊紧急闭锁停机;构建智能化的高端防爆智能单轨吊装备智能运输系统平台,形成全面感知、实时互联、分析决策、动态预测、协同控制的智能装备及感知监测系统。
在矿井架空乘人装置上安装摄像头,使用智能视频分析技术进行实时监控,检测和识别潜在的安全风险,如车辆撞击、人员行为异常等,并及时发出警报;对矿井巷道进行实时监测,识别和分析路面状况,如道路坑洞、塌方等,提高行驶安全性。架空乘人装置识别界面如图9 所示。

图9 架空乘人装置识别界面Fig.9 Recognition interface of overhead passenger device
4.8 智能视频分析在选煤厂中的应用
利用智能视频分析技术可以对选煤过程中的煤炭质量进行分析。通过分析视频图像中的煤炭特征,如颜色、形状、尺寸等,实时监测和评估煤炭质量,并根据预设的标准进行分类和分级。
1)煤炭分选与筛分。通过分析视频图像中的煤炭颗粒特征和运动状态,可以自动识别和分离出不同尺寸、密度或质量的煤炭颗粒,提高分选效率和准确性。
2)异物检测与剔除。通过分析视频图像中的煤炭表面特征和颜色变化,可以识别异物(如石块、金属等)并及时剔除,确保选煤过程中的煤炭质量和设备安全。
3)设备状态监测与故障诊断。通过分析视频图像中的设备运行状态、振动特征等,实时监测设备的工作状况,及早发现潜在故障,并提供预测性维护建议,减少设备损坏和停机时间。设备状态监测和故障诊断界面如图10 所示。

图10 设备状态监测和故障诊断界面Fig.10 Interface of device status monitoring and fault diagnosis
4.9 智能视频分析在智能化装车配煤系统中的应用
利用智能视频分析技术可以提高智能化装车配煤系统的自动化程度、装车效率和煤炭质量控制水平,有助于优化装车配煤过程,提高煤炭利用率,并降低人力成本和运输风险。
1)车辆识别和跟踪。通过分析视频图像中的车辆特征,如车牌号码、外观等,可以自动识别装车车辆并进行跟踪,以提供准确的车辆信息和运输数据。车辆识别和跟踪界面如图11 所示。

图11 车辆识别和跟踪界面Fig.11 Vehicle recognition and tracking interface
2)煤炭库存管理和调度。通过分析视频图像中的煤炭堆放情况和库存量,可以实时监测和管理煤炭库存,提供准确的库存信息和调度建议,以确保供应链高效运作。
3)安全监控和预警。通过分析视频图像中的安全隐患,如不安全操作等,及时发出警报,并采取相应的安全措施,确保人员和设备的安全。
4.10 智能视频分析在其他场景中的应用
利用智能视频分析技术可以提高变电所、水泵房等场景中的运行监测和安全管理能力,减少人力资源的需求,并降低事故风险[80]和设备损坏的可能性,有助于提高系统的可靠性、效率和安全性。例如,采用智能视频分析技术可对水泵房等重要场所的定期巡检任务、主副井的定时验绳检修任务等进行监管,对是否按时执行任务进行精确识别,并分析统计各任务的完成情况。水泵房定期巡检任务监管界面如图12 所示。
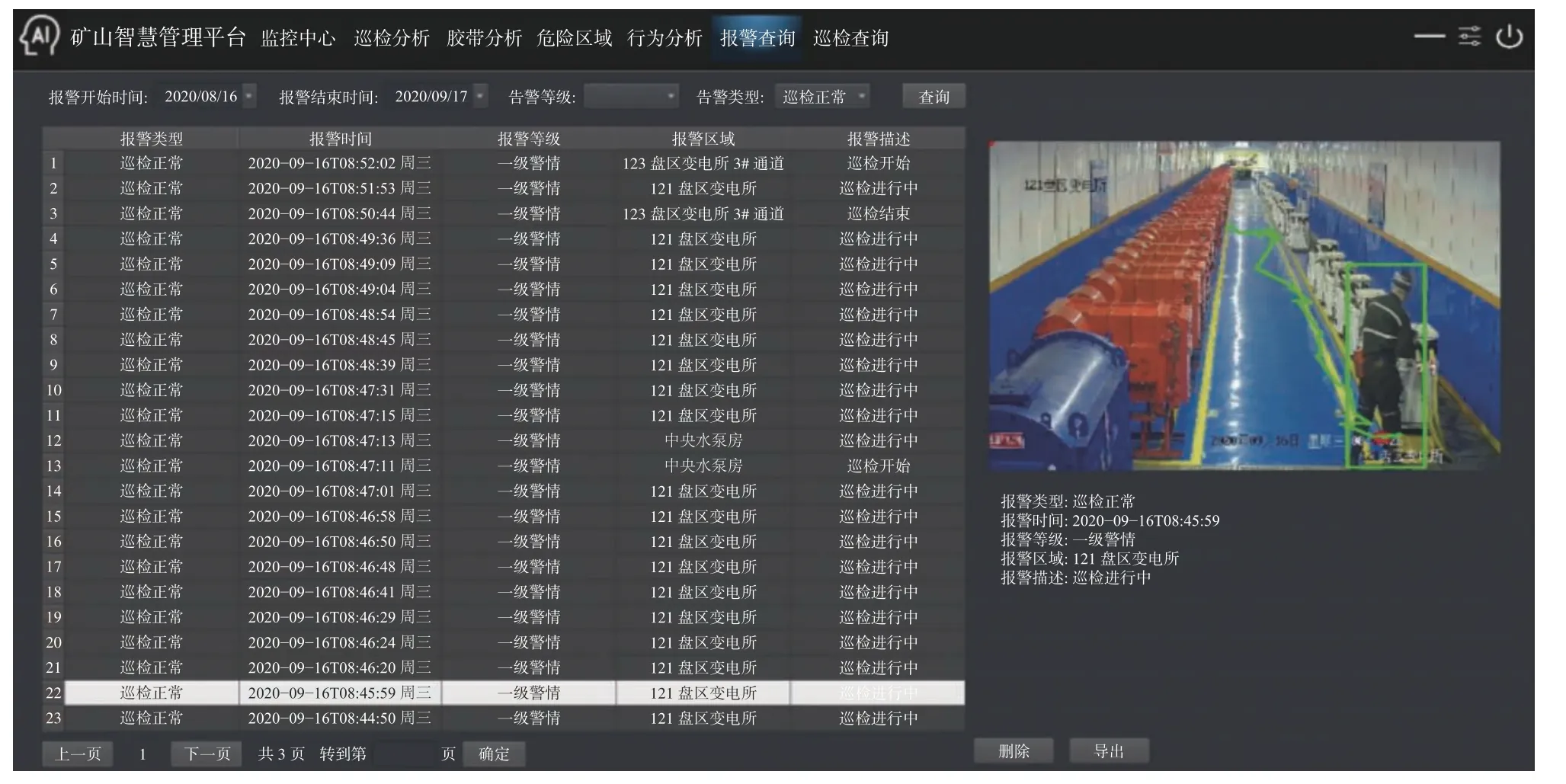
图12 水泵房定期巡检任务监管界面Fig.12 Supervision interface of regular inspection task in pump house
5 全矿井智能视频分析技术面临的挑战与发展方向
5.1 技术挑战与限制
全矿井智能视频分析技术面临的挑战和限制具体体现在以下5 个方面。
1)视频质量。矿井环境通常存在光线暗、粉尘多、昼夜变化大等特点,导致视频质量较差。低光照条件下的视频噪声、模糊和失真可能影响目标检测和行为识别的准确性。
2)复杂背景。矿井环境中存在复杂的背景干扰,如机械设备、岩石堆积等,可能使目标检测和跟踪困难,容易产生误报或漏报。
3)实时性要求。矿井安全性要求对实时监测和警报响应的需求较高。然而,实时视频分析需要在短时间内处理大量的视频数据,对计算资源和算法效率提出了挑战。
4)数据隐私和安全。矿井中的视频监控数据可能包含敏感信息,如工人隐私和矿井布局。因此,确保视频数据的安全存储、传输和处理,以及合规性和隐私保护的挑战变得尤为重要。
5)系统可靠性与稳定性。矿井环境复杂且恶劣,存在振动、温度变化、电磁干扰等因素,可能对智能视频分析系统的硬件设备和软件算法带来影响。
5.2 新兴技术趋势
在矿井智能视频分析领域存在一些新兴的技术和趋势,正在推动该领域的发展,具体如下。
1)深度学习技术。深度学习技术在目标检测、行为识别和图像分割等方面取得了显著成就。通过使用大规模数据集进行训练,该技术能够提高视频分析的准确性和鲁棒性。
2)实时分析和边缘计算。为了满足矿井视频分析对实时性的要求,研究人员正在探索在边缘设备上进行实时视频分析和决策的方法[81-87]。将分析任务部署到离视频源更近的边缘设备上,可以减小少数据传输延时并提高系统的响应速度。
3)多模态数据融合。除视频数据外,可以利用其他传感器数据,如声音、振动和气体浓度等,与视频数据进行融合分析。多模态数据融合可以提供更全面的矿井监测和异常检测能力。
4)强化学习技术。强化学习是一种通过与环境互动来学习最优决策策略的机器学习方法。在矿井智能视频分析中,可以使用强化学习算法来优化视频分析系统的警报策略和响应决策,以提高系统的效能和自适应性。
5)三维物体识别和重建。利用深度传感器等设备,可以实现对矿井中三维物体的识别和重建,提供更丰富的场景理解和空间感知能力。
6)数据隐私与安全保护。随着对数据隐私和安全性的关注增加,研究人员正在致力于开发安全的视频分析技术,如安全多方计算和差分隐私等。这些技术可以在保护数据隐私的同时,确保矿井视频分析系统的可靠性和合规性。
5.3 发展方向和建议
从矿井视频面临的挑战和限制角度出发,参考新兴技术的趋势,从以下6 个角度提出技术发展方向和建议。
1)提升和优化算法。进一步改进和优化目标检测、行为识别和图像分割等算法,以提高准确性、鲁棒性和效率。特别是针对矿井环境的特殊特点进行算法设计和优化,如低光照、复杂背景和目标多样性等。
2)融合多模态数据。将视频数据与其他传感器数据(如声音、振动、气体浓度等)进行融合分析,以提供更全面的矿井监测和异常检测能力。探索多模态数据的相关性和交互信息,提高对矿井状态的理解和预测能力。
3)开展实时分析和边缘计算研究。研究实时分析和边缘计算技术,将分析任务推移到离视频源更近的边缘设备上。同时,探索在边缘设备上进行模型训练和优化的方法,以提高系统的自适应性和灵活性。
4)开展强化学习和自主决策方面的研究。利用强化学习算法,使系统通过与环境交互学习最优的决策策略,以优化警报策略和响应决策。探索智能矿井视频分析系统的自主决策能力,使其能够根据实时情况做出智能决策和调整。
5)注重数据隐私和安全保护。加强对矿井视频数据的隐私和安全保护措施,包括数据加密、权限控制、匿名化和安全传输等。研究差分隐私和安全多方计算等技术,以确保数据隐私和系统的可靠性。
6)发展硬件设备和传感器技术。不断改进和创新矿井视频分析所需的硬件设备和传感器技术,如高性能摄像头、深度传感器和环境监测传感器等。这些技术的发展可以提高数据采集的精度和质量,为视频分析提供更可靠的输入。
6 结论
1)矿井智能视频分析是指利用先进的计算机视觉技术和人工智能算法,对矿井内的视频进行实时分析和处理,以提取有用的信息和数据。矿井智能视频分析关键技术的发展使得矿井内的视频数据可得到有效的分析和利用,为矿井管理和生产提供更多的信息和决策支持。这些技术有助于提高矿井的安全性和生产效率,减少人力资源的浪费,具有重要的应用价值和市场潜力[88]。
2)通过对煤矿智能化建设过程中高端智能制造领域的智能装备和智能视频分析技术进行研究,取得的成果可提升我国煤矿井下关键技术水平,包括安全预防准备、监测预警、态势研判、救援处置和综合保障,形成一批具有国内外领先水平和自主知识产权的高新技术和高端装备,加速人工智能、边缘计算、物联网等高新技术在传统煤炭行业的应用。同时,实现煤矿井下安全监测与风险防控系统及装备的成套化和完全国产化,改变我国煤矿安全开采的风险防控措施和预警标准体系。此外,这些技术的应用能够为我国煤炭安全开采行业在更高层次上的发展和结构调整提供技术支持和安全保障。
