蒙套自动清洁机构的分析与设计
2023-12-04唐亮
唐 亮
(广东省机械研究所有限公司,广州 510705)
在转子自动涂敷领域,蒙套主要用于保护转子未涂敷区域,避免涂敷粉末的存在而造成转子报废,因此蒙套贯穿整个涂敷工艺过程[1-2]。涂敷过程中粉末会落到蒙套表面,经过涂敷高温固化工艺,粉末会在表面固化结块。连续长时间生产时,结块会越积越多,最终影响产品的涂敷尺寸和质量。
目前,蒙套固化的涂敷粉末通常采用化学药水长时间浸泡来软化已结块的粉末。高压水枪喷射清除或采用刀具进行机械清除,整体工作量大。采用化学药水浸泡的方式,可能会造成环境污染。蒙套在线自动清洁机构对蒙套结块进行在线清洁,同时回收清洁产生的粉尘,确保设备可以长时间连续运行生产,提升涂敷质量的稳定性,降低工作强度。
清洁过程中会产生非金属粉尘。关于粉尘的回收处理和风险预防,很多学者做了深入研究。张本峰结合粉尘特性发明了一种粉尘回收装置,并详细阐述了其工作原理[3]。杨钢辉针对工业生产中产生的粉尘,从粉尘爆炸原理分析入手,论述了粉尘爆炸危险场所的防爆安全措施[4]。孙雅薇利用粉尘最小点火能测试装置,对非金属粉的最小点火能进行测定,研究了浓度和环境湿度对最小点火能的影响,并分析了粉尘的点火机理,为预防非金属粉尘爆炸提供了重要方法[5]。
1 工艺分析及方案设计
1.1 蒙套清洁要求
分析蒙套在涂敷过程中的工艺及过程,确定蒙套清洁区域和清洁程度。根据现有蒙套的结构特点,确定清洁区域为蒙套与转子接触的端面及斜面。结合转子涂敷厚度0.25 ~0.35 mm 的要求,蒙套端面及斜面的积粉厚度应小于0.10 mm。结块的积粉在涂敷过程中不能出现脱落现象,以免造成转子涂覆不良。清洁节拍与涂覆设备节拍匹配,避免蒙套清洁区域出现蒙套积压而影响设备的生产效率。蒙套结构如图1 所示。

图1 蒙套结构
1.2 清洁工艺分析
基于清洁要求,结合蒙套的结构特点,分析蒙套的清洁方式和工艺,确保清洁方案满足设备的使用要求。首先,蒙套结块积粉厚度应小于0.1 mm。使用过程中,蒙套每循环经过涂覆区域一次,就会沾上粉,需要在下一次进入涂覆区域前进行清洁。因此,将清洁机构设置于拆蒙套机构之后,此时蒙套带有一定的余温,新黏结的涂敷粉容易清除。其次,结块的积粉在涂敷过程中不能脱落。蒙套通过电机驱动旋转的仿形刀具对端面及斜面黏结的粉末进行清洁。为避免出现部分粉末残留,刀具清洁后由毛刷进行二次清洁。清洁过程连接集尘器,回收清出的粉末颗粒。最后,清洁节拍与涂覆设备节拍匹配。分析清洁机构动作流程,评估动作和清洁时间,采用双工位同时清洁的方式,延长刀具与蒙套的清洁时间,减少蒙套结块积粉量,提升设备涂敷稳定性。
1.3 清洁机构总体规划、设计
根据蒙套清洁要求和工艺分析,清洁机构设置在拆蒙套机构处,对接拆蒙套机构的蒙套流出点。此处设置了用于蒙套横移的移栽机械手,在移栽机械手中设置了蒙套限位、定位机构以及清洁回收机构。同时,为了使蒙套可以顺利移栽,清洁回收装置设计成可前后移动,清洁刀具根据蒙套形状进行仿形设计,具体如图2 所示。

图2 清洁机构总体布局
2 清洁机构动作流程分析设计
根据前序拆蒙套机构的蒙套出料方式,结合生产节拍的要求,对清洁机构动作和流程进行综合分析、设计。清洁机构采用Y、Z两轴机械手取料,限位、定位机构对蒙套进行定位,清洁回收机构前移进行蒙套清洁。完成清洁的蒙套由机械手移出清洁机构,流入涂覆设备前端工位进行蒙套循环使用。
具体清洁机构的动作流程设计:
步骤1,前序拆蒙套机构拆除蒙套与转子,将蒙套移动到清洁机构取料位;
步骤2,移栽机械手下压,使蒙套进入机械手取料槽;
步骤3,机械手将蒙套移动至清洁工位;
步骤4,限位、定位机构定位蒙套;
步骤5,机械手二次下压机构下压,将蒙套完全压紧;
步骤6,清洁、回收机构前移,蒙套端面及斜面进入清洁回收机构;
步骤7,旋转的仿形刀具压紧到位;
步骤8,清除蒙套端面及斜面黏结的粉末,由集尘器回收;
步骤9,刀具清洁完成,清洁回收机构后退;
步骤10,蒙套定位机构压紧释放,机械手将蒙套移动到二次清洁位置;
步骤11,清洁回收机构重复步骤4 ~6,对蒙套进行二次清洁;
步骤12,二次清洁完成,清洁回收机构后退;
步骤13,蒙套定位机构压紧释放,机械手移动,蒙套流入涂覆设备前端工位循环使用。
3 关键机构设计
依据蒙套清洁工艺、设备方案及动作流程规划,对设备涉及的关键机械结构进行详细设计,实现蒙套的在线自动清洁。
3.1 移栽机械手
根据清洁机构动作流程和功能要求,移栽机械手主要包括Y、Z轴气动机械手、二次压紧机构和浮动压头3 个主要机构,布局如图3 所示[6]。
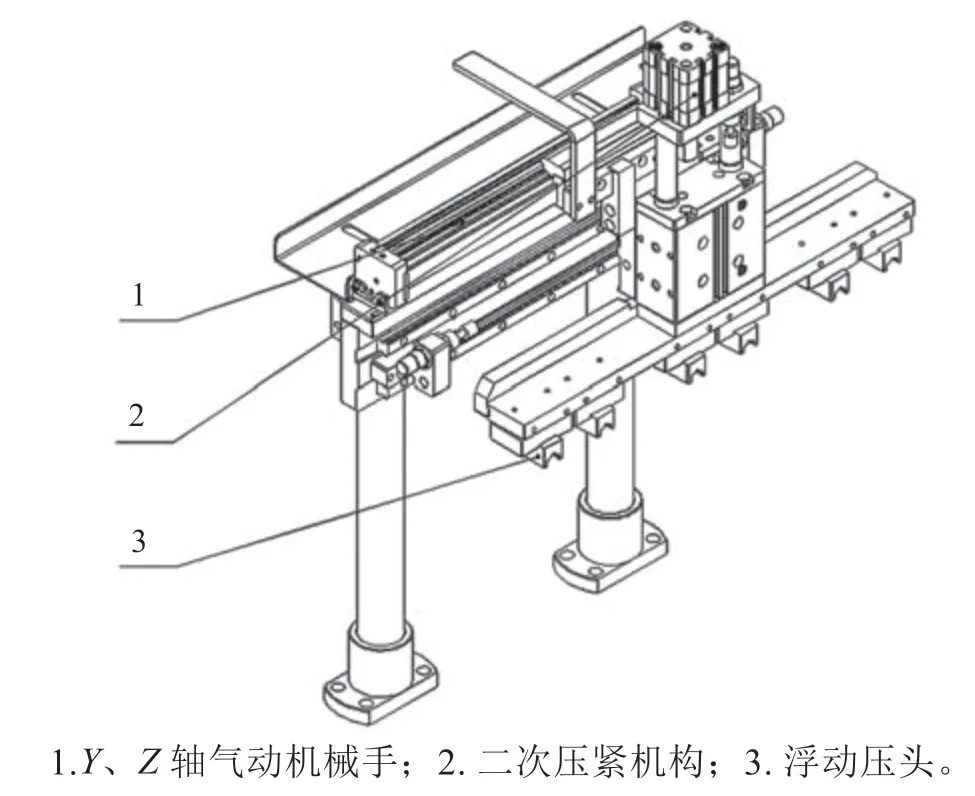
图3 移栽机械手
3.1.1Y、Z轴气动机械手
根据设备动作流程,机械手有Y、Z两轴的动作,都是点对点的位置移动。Y、Z轴分别用气缸进行驱动,Y轴移动距离较长,采用HIWIN 直线导轨进行导向,避免Y轴驱气缸在垂直方向上受力。Z轴由于安装空间受限,采用双导轨气缸驱动,同时提供导向和驱动力功能。Y、Z轴两侧均配置液压缓冲器,减少到位时的动作冲击,提高机构快速移动时的稳定性。
滑台及Z轴上的物料质量约为10 kg,滑台移动速度为300 m·s-1,移动行程为180 mm。结合安装位置,Y轴驱动选用钢缸径为18 mm、行程为200 mm 的无杆气缸。根据Z轴移动行程,Z轴气缸同时用于导向。Z轴气缸选用缸径为32 mm、行程为50 mm 的气缸。
3.1.2 二次压紧机构
在蒙套清洁时,仿形刀具会快速切削黏附在蒙套上的结块涂敷粉,产生一定的旋转力矩。为克服该力矩,防止蒙套在清洁时旋转,移栽机械手的Z轴上设置了二次压紧机构。当蒙套清洁完成需要移动时,二次压紧机构伸出,Z轴气缸下降行程变短,蒙套压紧解除,使得蒙套可以随移栽机械手进行移动。
二次压紧采用气缸驱动,缸径为40 mm,比Z轴气缸大。当蒙套在移栽过程中无须完全压紧时,二次压紧气缸伸出,Z轴气缸行程变短,蒙套有一定的间隙。当蒙套在移栽过程中需完全压紧时,压紧气缸收回,Z轴气缸完全压紧蒙套,此时进行蒙套清洁,防止蒙套旋转。二次压紧气缸装在Z轴双导杆气缸尾部,并在导杆尾部设置安装支架,具体如图4 所示。
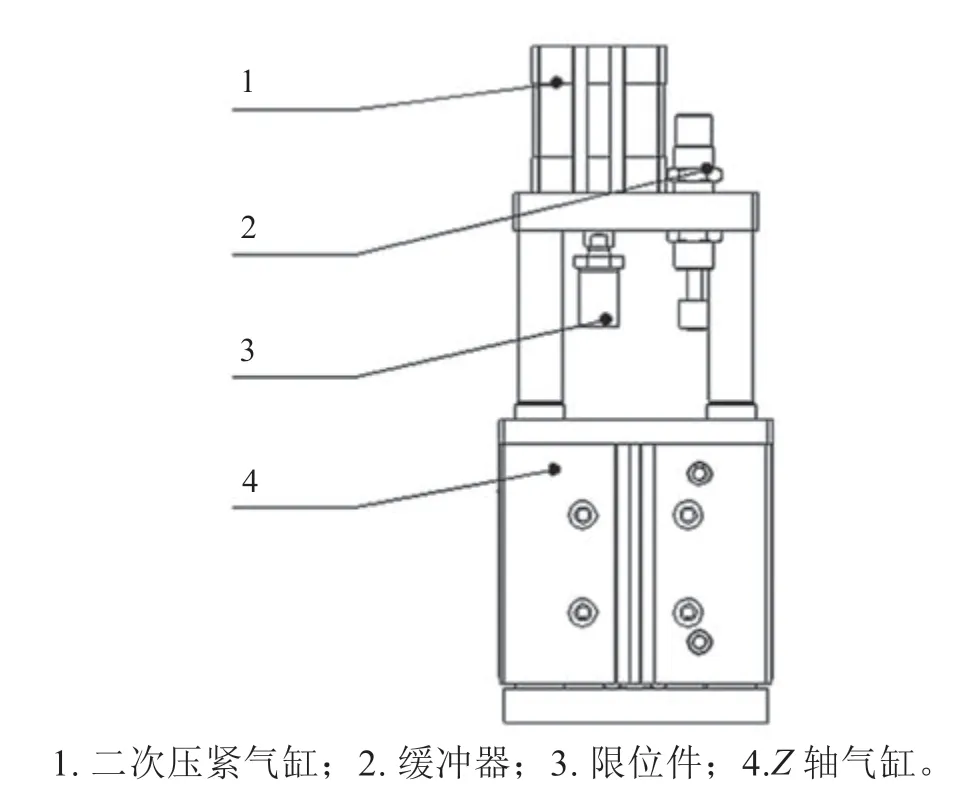
图4 二次压紧机构
3.1.3 浮动压头
根据工艺节拍分析,蒙套清洁机构采用双工位的方式进行蒙套清洁。清洁工位分为刀具清洁和毛刷清洁两种方式,加上蒙套取料工位,移栽机械手上共有3 组6 个浮动压头[7]。在压块、蒙套等零件加工过程中,零件存在公差。移栽机构设置了浮动压头,通过在压头内部设置弹性结构,消除因零件加工公差而导致蒙套清洁时无法完全压紧等现象,确保清洁刀具与蒙套有效接触,保持清洁效果稳定。弹性结构内置导向柱和蝶形弹簧,弹性行程为1 mm,用于消除加工公差,具体如图5 所示。

图5 浮动压头
3.2 定位、限位机构
蒙套的清洁过程采用全自动运行方式,因此在蒙套移动和清洁过程中,蒙套需要始终处于定位、限位状态,以免蒙套脱离特定位置,造成机构卡机,进而影响设备运行。根据动作要求,设置了导向板和弹性定位组件,具体如图6 所示。
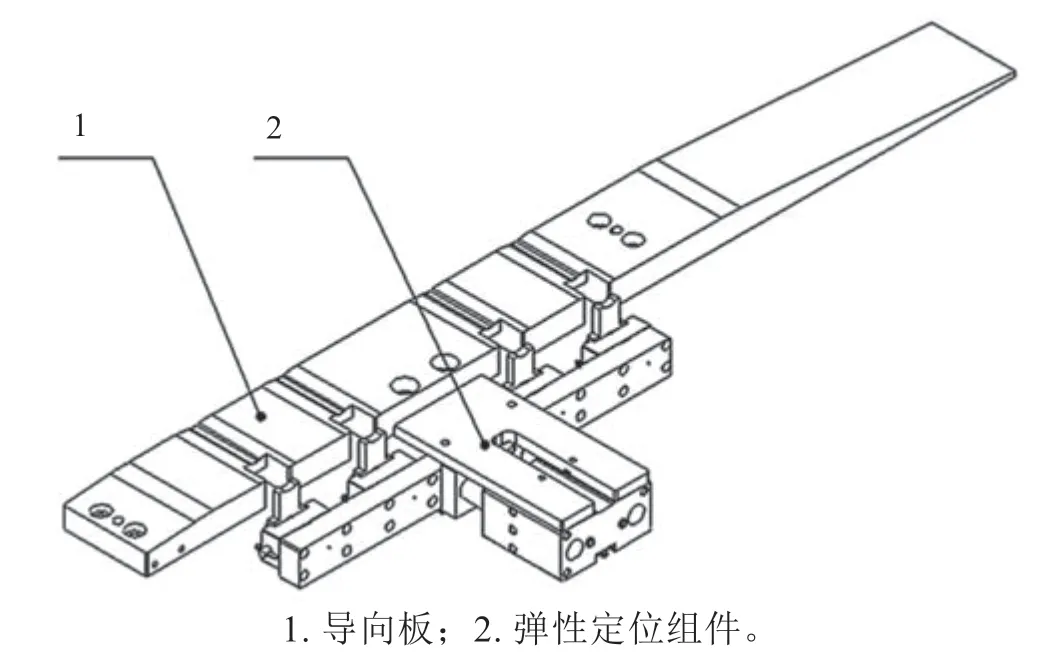
图6 定位、限位机构
3.2.1 导向板
在蒙套移动过程中设置了导向板,使蒙套在导向板上移动。在清洁工位处,每个蒙套停留位设置限位槽,确保蒙套位置可控。导向板表面采用了抛光工艺,可减少蒙套移动过程中的磨损。
3.2.2 弹性定位组件
在蒙套清洁过程中,仿形刀具与蒙套端面、斜面均为刚性接触,在压紧前依靠导向板一侧进行定位,确保被定位的蒙套端面、斜面位置相对一致。在蒙套等零件加工过程中,零件存在公差范围。因此,定位组件上要设置弹性拨片,消除因零件加工公差而导致的蒙套定位偏差等现象,确保清洁效果稳定。
弹性定位组件由拨片、扭簧、旋转轴以及驱动气缸等构成。根据蒙套的重量调整行程量,选择扭簧的直径和旋转角度。用扭簧压紧拨片,使拨片在定位蒙套时依靠扭簧的弹性消除蒙套的公差范围。蒙套与导向板靠边贴紧,不应存在虚位。
3.3 清洁、回收机构
3.3.1 清洁机构
根据工艺及节拍要求,蒙套清洁机构采用双工位结构,即每次同时清洁2 个蒙套。清洁机构分为刀具清洁区和毛刷清洁区,具体如图7 所示。
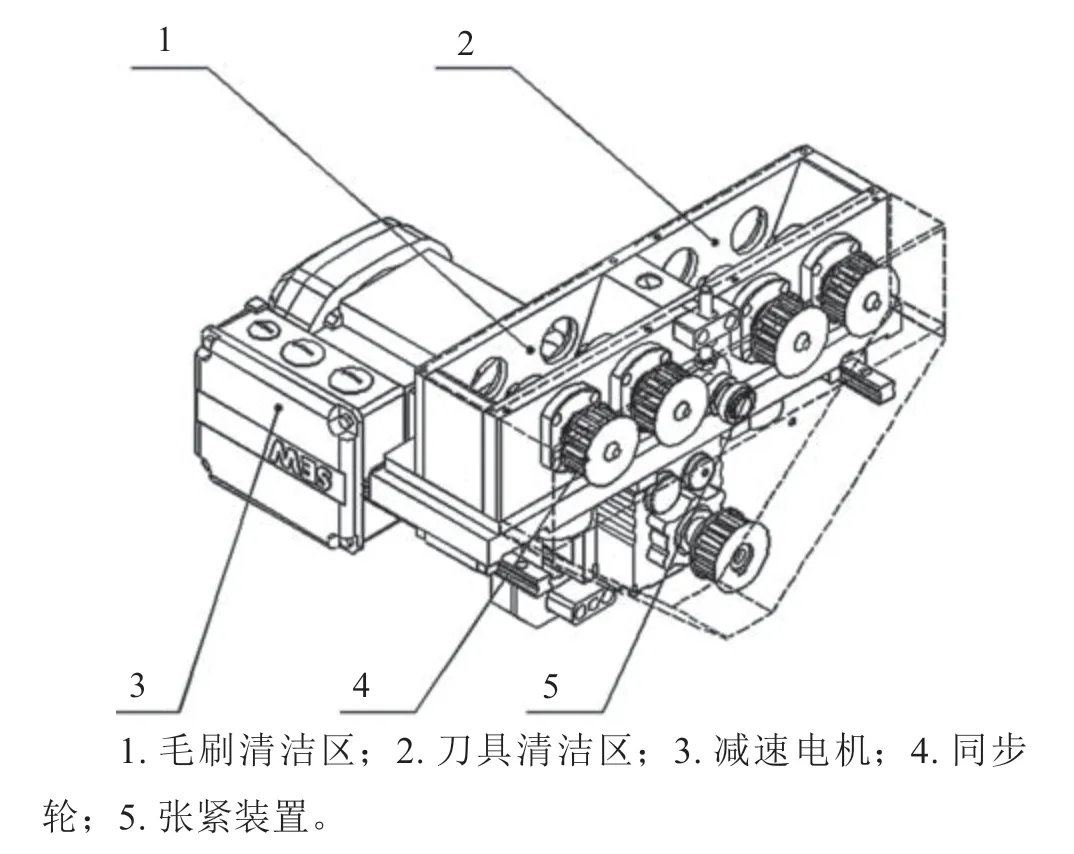
图7 清洁机构
清洁机构通过气缸驱动完成前进、后退动作。当移栽机构将蒙套输送至清洁区时,气缸前移执行蒙套清洁动作。清洁完成后清洁机构后退,移栽机械手将蒙套输送至后序工位。清洁机构刀具和毛刷采用电机驱动,通过同步带、同步轮将电机的旋转运动转移到刀具、毛刷的安装轴上,实现三者同步旋转,为刀具、毛刷提供蒙套清洁旋转动力[8]。
清洁机构分为刀具清洁区和毛刷清洁区。刀具清洁区主要通过仿形刀具与蒙套的接触,快速清除蒙套上的粉末,完成约95%的清洁工作。毛刷清洁区主要通过非金属毛刷与蒙套的接触,对蒙套上经刀具清洁后部分已经松动的残留粉末进行二次清洁。
3.3.2 粉尘回收机构
粉尘是蒙套清洁过程中产生的物质。蒙套进入清洁区时,涂敷粉末大部分已经结块,清洁时会产生块状粉尘和颗粒粉尘。当粉尘浓度达到一定程度时,会产生爆炸风险。同时,块状粉尘长时间累积会影响刀具和毛刷旋转轴的运动,因此清洁机构的安全性和粉尘回收设计是重中之重。
清洁机构中,刀具清洁区和毛刷清洁区采用相对封闭的设计方式。前端仅留蒙套端面及斜面的进出孔,尺寸比蒙套头部尺寸每边大2 mm。蒙套进入清洁区后,会形成一个2 mm 的空隙透气环。刀具、毛刷清洁区底部设置了斜面和用于驳接回收管道的孔。清除的粉末通过斜面进入回收孔。
粉尘回收机构配置了防爆型工业吸尘器,并将吸尘器的吸风口与清洁区回收管道口连接如图8 所示。吸尘器工作时,刀具清洁区和毛刷清洁区内腔形成负压,外部空气通过透气环进入内腔,将清洁过程产生的粉尘快速回收至吸尘器,以解决工作区域的粉尘浓度、粉尘累积问题。粉尘经吸尘器过滤达到排放标准后,可直接排放到空气中。
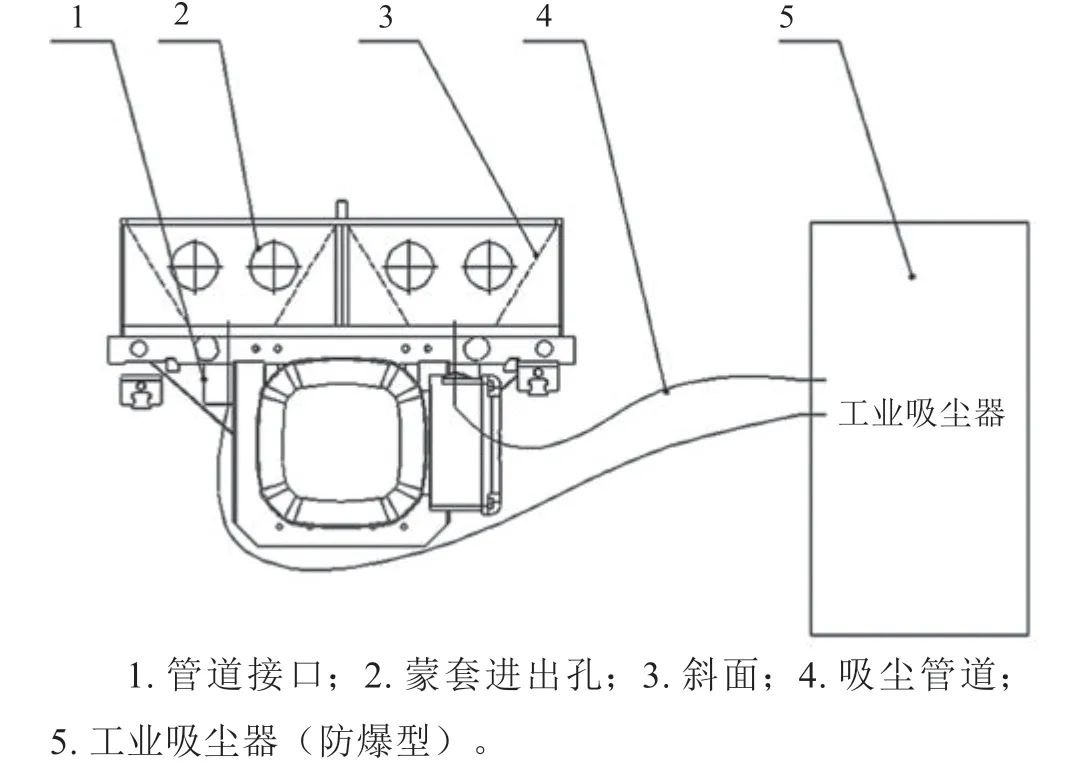
图8 粉尘回收机构
3.4 仿形刀具
刀具的设计直接影响清洁效果。刀刃与蒙套贴合越好,清洁效果越明显。根据蒙套端面、斜面的形状和尺寸,刀具采用仿形设计,端面、斜面采用分体式刀刃设计。为消除蒙套加工公差,刀头采用浮动设计。在仿形刀具的尾部设置弹簧,并预留一定的浮动行程。刀具采用65Mn 材料,并进行热处理使其洛氏硬度保持在50 ~55,同时保持刃口锋利,具体结构如图9所示。

图9 仿形刀具
4 结语
蒙套自动清洁机构可实现蒙套的在线自动清洁,自动化程度高,清洁效果良好。该机构目前已经研发成功并集成在全自动涂覆产线上,在终端用户工厂投入实际生产,效果显著。蒙套离线清洁由原先的每半个月清洁一次延长为每4 ~5 个月清洁一次。清洁机构的投入使用,极大地减少了蒙套粉尘黏结,降低了设备维保工作强度,对提高设备的利用率和涂覆质量的稳定性有积极作用。