基于RobotStudio 的饮料装箱码垛模拟仿真设计
2023-12-04梅秋平黄海桐刘龙鑫伍斌华
梅秋平 李 雯 黄海桐 刘龙鑫 伍斌华
(重庆机电职业技术大学,重庆 402760)
工业机器人是一种高度智能的工业生产设备。码垛机器人在现代工业中应用越来越广泛,其多关节机械手和多自由度的机械装置可以准确实现非常复杂的操作,为现代生产提供更高的生产效率和产品质量。工业机器人运用于食品生产线的每个步骤,能够在生产流程中自动完成重复性的工作,如装配、包装、搬运等,从而减少人为操作的误差和疲劳程度,提高生产效率和质量的可靠性,大幅降低生产成本,节约人力资源[1]。
为了更好地了解这种设备的设计和工作原理,利用仿真技术编写程序,详细模拟机器人在工作站的整个工作流程,深入研究相关组件的设计,如机器人工作站、信号连接和组件连接。利用Smart 组件可以连接多个工具和机器人的确切位置,从而精准协调并快速完成各种自动化任务。通过编写和优化机器人程序,能够在仿真环境中模拟出各种不同的搬运和码垛操作。
1 工作站组成与机器人选择
1.1 工作站组成
机器人工作站由机器人、传送带、夹爪、吸盘、饮料和托盘等组成,如图1 所示。其中:机器人作为核心设备可以安装各种工具,用以实现不同的功能;传送带用来运输物体;托盘用来放置物体;吸盘和抓夹安装在两个机器人上,用来搬运物体;箱子用来装载物体。

图1 工作站
1.2 机器人选择
此次选用的IRB 2600 机器人是一种紧凑的机器人,属于ABB 机器人系列中的中型机器人,拥有1.65 m的X轴行程和20 kg 的额定负载容量。这款机器人距离目标设备较近,能够缩小工作站的占地面积[2]。它采用先进的技术和材料,具有出色的运动控制和定位能力,可以在高速移动和精确定位之间进行快速切换,负载能力更强,非常适用于物料搬运、码垛等目标应用。经过精心的结构设计,并制定一系列防护措施,此机器人既可以快速完成搬运码垛任务,又可以保持高精度,确保生产过程的准确性和稳定性。
2 工作流程
2.1 整体路径规划
在传送带400 的起点位置,每隔2.4 s 有一个饮料瓶从起点出发。同时,传送带400-2 的起点位置,每隔4.8 s 传输一个箱子用来装饮料瓶。当3 个饮料瓶到定位槽内时,传送带400 停止传输,同时箱子到达指定位置。机器人1 接收到信号后,夹起3 个饮料瓶装入箱内,装满9 瓶饮料,传送带400-3 开始运动。箱子进入封箱部分,封箱完成从传送带400-guide 输出到达指定位置。机器人2 接收信号,利用吸盘吸取封箱依次放在托盘上。此过程循环往复,直到任务完成。
2.2 抓夹设计
夹爪夹具主要用来装夹饮料瓶[3]。通过RobotStudio软件中自带的三维建模功能完成饮料瓶建模,尺寸参考市面通用型饮料瓶。为了提高搬运效率,在本工作站中设计一次夹取3 瓶饮料的机械夹爪夹具,结构外形如图2 所示。

图2 夹具结构
2.2.1 吸盘夹具Smart 组件创建
创建Smart 组件是通过添加各种逻辑、动作等组件实现工作站设计的过程,具体创建过程如下。首先,创建一个Smart 组件并重命名,将吸盘放进组件内,同时将吸盘里面的工具设置为角色,保证机器人能够识别吸盘的工具坐标。其次,添加安装、拆除、直线传感器和非门组件,添加XP 输入信号。最后,添加直径为2 mm 的直线传感器,位置在吸盘下表面中心处,上下各偏移20 mm。输入信号为1 时,XP 输入信号连接并激活直线传感器,将检测到的物体传送到子对象上(安装父对象为吸盘)。输入信号为0 时,直线传感器将检测到的物体传送到拆除模块[4]。
运用信号控制安装和拆除过程。设置吸盘本地原点,在吸盘上表面中点处点击应用。旋转吸盘坐标,当其与机器人法兰盘坐标方向一致后安装吸盘夹具,如图3 所示。

图3 吸盘夹具安装
2.2.2 抓夹夹具Smart 组件创建
由于抓夹夹具有可动部分,需要创建机械装置。首先,在建模模块中点击创建机械装置,类型选择为工具。其次,创建一个Smart 组件并重命名,将抓夹整个机械装置放在Smart 组件内。最后,添加安装、拆除、直线传感器等组件,设置直径为2 mm 的直线传感器,位置为沿中心上下各偏移20 mm,完成后点击应用。
因为需要同时夹起3 个饮料瓶,所以要设置3 个直线传感器。直接创建一个新的Smart 组件并重命名抓夹X3,把抓夹1 放在组件内,再复制两个同样的抓夹并重命名为抓夹2 和抓夹3。设置抓夹2、抓夹3 的偏移位置,间隔100 mm。对整个抓夹X3 的Smart 组件进行连线设计,创建输入信号XP3,连接抓夹1 ~3,实现3 个位置一起运动。设置抓夹的本地原点为上表面圆心,旋转坐标使其和机器人法兰盘坐标方向一致,最后安装在机器人上,如图4 所示。
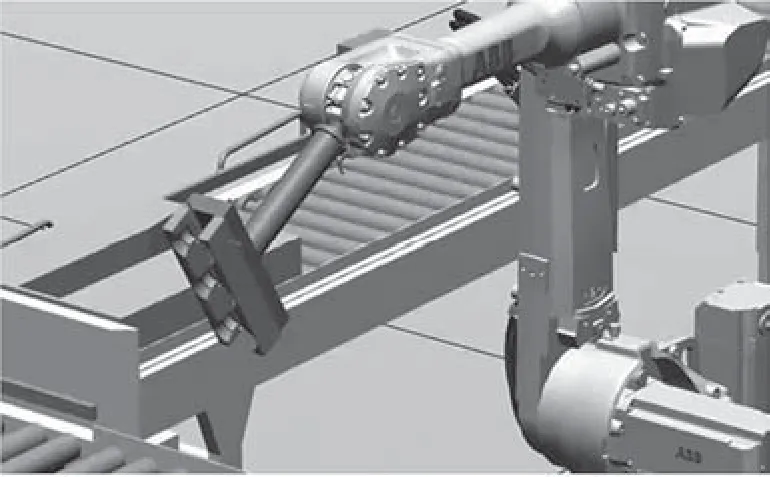
图4 夹爪工具安装
2.3 饮料传送带设计
选定饮料中心点位置并对准定位槽中心,保持饮料在Y轴不会偏移。创建Smart 组件,重命名饮料传送带,将饮料传送带、饮料、定位槽放在Smart 组件内,设置饮料传送带和定位槽不由传感器检测,避免阻碍运行。在Smart 组件内添加面传感器、队列、直线运动等组件,进行连线设计。在传送带终点位置创建3 个面传感器,间隔100 mm,让物体累计在定位槽内,方便夹取饮料。当面传感器检测到物体时,整条传送带将停止运动。第1 个面传感器检测到第1 个物体时才打开第2 个面传感器,以此类推,依次按照顺序检测物体,完毕后传送带停止运动。将面传感器检测到的物体安装到定位物体上重新定位,定位后拆除,保留定位后的位置。设置输出信号,由面传感器3 连接输出信号,此阶段工作任务完成[5]。
2.4 装箱传送带设计
每隔4.8 s 向前运输一个箱子,到达机器人位置后停止运动。机器人接收信号将饮料瓶装在箱内,将箱子放在传送带起点位置,开始构建传送带。首先,创建Smart 组件并重命名,将传送带400-2、400-3 和箱子放在Smart 组件内,设置2 个传送带不由传感器检测,避免阻碍运行。其次,Smart 组件内添加面传感器、队列、直线运动、图形拷贝、非门、时钟等进行连线设计。最后,捕捉传送带边缘创建一个面传感器,目的是让箱子碰到面传感器后消失。进入下一封箱阶段,创建第2 个传感器,使箱子停于机器人前,进行饮料装箱任务。装配过程中,需要对箱子进行定位,并对饮料瓶进行父对象设计。
2.5 封箱传送带设计
将封箱放在合适位置,创建Smart 组件。将传送带400-guide 放进组件内,关闭传送带由传感器检测。将箱子合并成一个组件,重新设置本地原点后放进组件内。Smart 组件内添加面传感器、队列、直线运动、图形拷贝、非门等组件,进行连线设计。创建时间延迟和模拟打包过程。创建输入信号,连接逻辑门、拷贝、队列,信号输入经过3 s 进行物体拷贝,并进入队列。面传感器检测到物体后将信号传给非门,非门输出一个控制信号,控制直线运动。设置输出信号,使得码垛机器人和传送带收到物体已经到达的消息,开始下一步工作,然后设定定位即可。
3 仿真调试
RAPID 语言是一种支持分层编程方案的编程语言,应用该语言可以将工作流程编入机器人进行仿真模拟[6]。饮料瓶向前移动,到达定位位置。机械臂到达抓取点上方,饮料瓶到位后机器人抓取饮料瓶放入箱内。装箱完成后,箱子向前移动进入封箱阶段。封箱结束后到达下一个被抓取点,吸盘抓取箱子并进行码垛,工作站仿真完成。搬运装箱仿真过程和搬运码垛仿真过程分别如图5 和图6 所示。

图5 搬运装箱仿真过程

图6 搬运码垛仿真过程
4 结语
首先,利用RobotStudio 软件构建机器人工作站,并对软件中没有的物料模型进行建模。其次,将机器人、传送带等组件导入工作站,规划整个工作站的具体布局。再次,根据工作站路径规划、工作流程,采用RAPID 程序进行逻辑编程,让机器人按照目标点位置进行模拟运动。最后,进行仿真模拟。由仿真结果可以看出,该工作站完成了所有任务,验证了饮料装箱码垛工作站的可执行性。
