海上起重机过载保护系统分析
2023-12-04刘恩德
刘恩德
(豪氏威马(中国)有限公司,漳州 363122)
海上起重机在作业过程中,过载往往由提升过重的负载或负载突然意外移动引发,如吊钩缠绕在补给船或其他移动物体上、负载被吸入海床等,很可能导致起重机结构受到损坏。海上起重机的过载保护系统,对起重机的安全保障起着至关重要的作用,通常包括常规过载保护系统和特殊性能过载保护系统,特殊性能过载保护系统又分为手动过载保护系统、自动过载保护系统、侧臂保护系统以及紧急负载释放系统。
1 常规过载保护系统
海上起重机需要配备常规的过载保护系统,国内外各大船级社的规范均有要求。起重机在作业过程中,载荷传感器需要实时监测起重机的负载情况。当出现超载时,过载保护系统生成警告或警报通知起重机操作员,操作员可以及时将起重机调整到更为安全的作业姿态或位置[1]。
起重机过载保护系统产生警告和警报的触发值,国内外知名船级社和行业组织的规范都有明确规定。但是,各规范要求的触发值有所差异,具体以欧洲海洋吊机标准EN 13852-1、EN 13852-2 以及挪威船级社(Det Norske Veritas,DNV)、英国劳氏船级社(Lloyd’s Register,LR)、法国船级社(Bureau Veritas,BV)、中国船级社(China Classification Society,CCS)发布的规范标准为例进行说明,如表1 所示。其中,SWL代表安全工作荷载(Safe Working Load)。另外,美国船级社的规范没有具体指出过载保护系统的过载警告值或警报值。在设计时,设计人员可以参照其他船级社的规范要求,与美国船级社的审核人员达成一致。

表1 起重机过载保护系统产生警告触发值
起重机在作业过程中一旦发生过载行为,会有相应的声光报警系统进行响应,以提醒起重机操作人员和船上工作人员。当起重机恢复正常后,这些声光报警便会被消除。起重机发出警报时,意味着起重机的实际工作载荷接近额定安全载荷,此时驱动系统应降速。当过载值达到某一极限(通常为110%SWL)时,过载保护系统应使起吊作业运动立即自动停止[2]。对于具有多个负载曲线的起重机来说,当选择不同的负载曲线时,过载保护系统也应能够以不同的方式做出相应的警告或警报反应。
对于在港口、遮蔽水域等相对静态的海域作业的起重机,所有可能产生起重机过载的作业都应禁止。一旦出现过载预警,过载保护系统应允许工作人员将起重机调整到更安全的姿态或位置,严禁起重机发生进一步的超载动作。同时,所有能够减少过载的运动都应保持可用状态。这意味着过载保护系统的设计应保证大臂只能抬起不能下放,并允许回转系统继续工作,这样可以将起重机转到更安全的位置。例如,将满负荷的吊钩转到海面上,以避免对船只及船上人员产生潜在威胁。
2 特殊功能过载保护系统
对于在动态海面上作业的起重机,过载可能是由海洋环境引起的,在这种情况下停止起重机的运动不但无法限制过载,而且可能产生比过载更为严重的后果,这时就需要利用具有特殊功能的过载保护系统。特殊功能过载保护系统包括手动过载保护系统、自动过载保护系统、侧臂保护系统以及紧急负载释放系统,虽然这些系统的目的都是保护起重机免受过载,但是它们的操作条件和设计要求大不相同。
2.1 手动过载保护系统
手动过载保护系统是由起重机操作员手动激活的系统。起重机释放绳索,通过降低承载力,即将绳索拉力限制在较低值,并允许吊钩从起重机上向任意方向拉开,以此保证起重机免受可能的过载和过倾覆力矩[3]。手动过载保护系统应确保在所有正常运行条件下都能够被激活,如吊机正常停止和紧急停止期间、起重机主电源在海上舷外起吊期间发生故障或关闭等。
手动激活过程较短暂,操作员要能够快速做出反应。因此,激活开关或手柄的位置应便于操作员使用,并且应标有黄色,防止意外使用。在任何时候,起重机操作员都可以复位系统,且不会损坏起重机。
绳索所受的力应保持在最大额定载荷的10%~20%,并且允许绳索完全脱离卷筒,而不会对起重机造成重大损坏。系统应能够连续激活或重置至少3 次,并且在5 min 内连续激活。系统启动后,除人员转移功能外,吊钩的最低位限位开关、绞盘卷筒的末端停止和紧急停止功能将失效,过载解除后可恢复。
手动过载保护系统功能的所有信号都应通过硬接线实现,不允许无线控制。手动过载保护系统应在驾驶室、控制站内配备控制指示器,并标记清晰可辨的标志。手动过载保护系统的声音信号应与其他过载保护系统的声音警告和警报区分开,如常规过载保护系统、自动过载保护系统等。
起重机设计人员在组件级别中详细评估控制系统,包括液压、电气、电子、气动发动机驱动组件以及其他相关组件,记录系统在单个组件、单个故障和电缆损坏方面的行为。评估的目的是在发生单次故障时,证明手动过载保护系统和其他安全功能的可靠性[4]。
2.2 自动过载保护系统
当起重机的负载超过一定阈值时,在没有起重机操作员触发的情况下,自动过载保护系统会被激活,允许吊钩在指定的纵向偏角和横向偏角内被拉离起重机,以保证起重机和船只免受严重过载和过倾覆力矩。当过载和超力矩情况不存在时,系统将自动停用。
在设计时,应充分理解自动过载保护系统是在突发过载情况下自动做出的反应,因此需要重点考量系统响应时间和保持力。系统响应时间为过载发生到最大值时的累积时间,系统的保持力为悬挂与起重机额定载荷相对应的负载。如果吊钩负载超过额定载荷,因实际吊钩载荷增加而导致的最小吊钩释放速度应不小于(Vd2+Vc2)/2。其中,Vd为支撑负载的甲板在垂直方向的速度,Vc为由于起重机基座运动导致起重机吊臂端头产生的垂直方向速度。根据EN 13582-1 计算得出的自动过载保护系统要求的速度,如图1 所示。
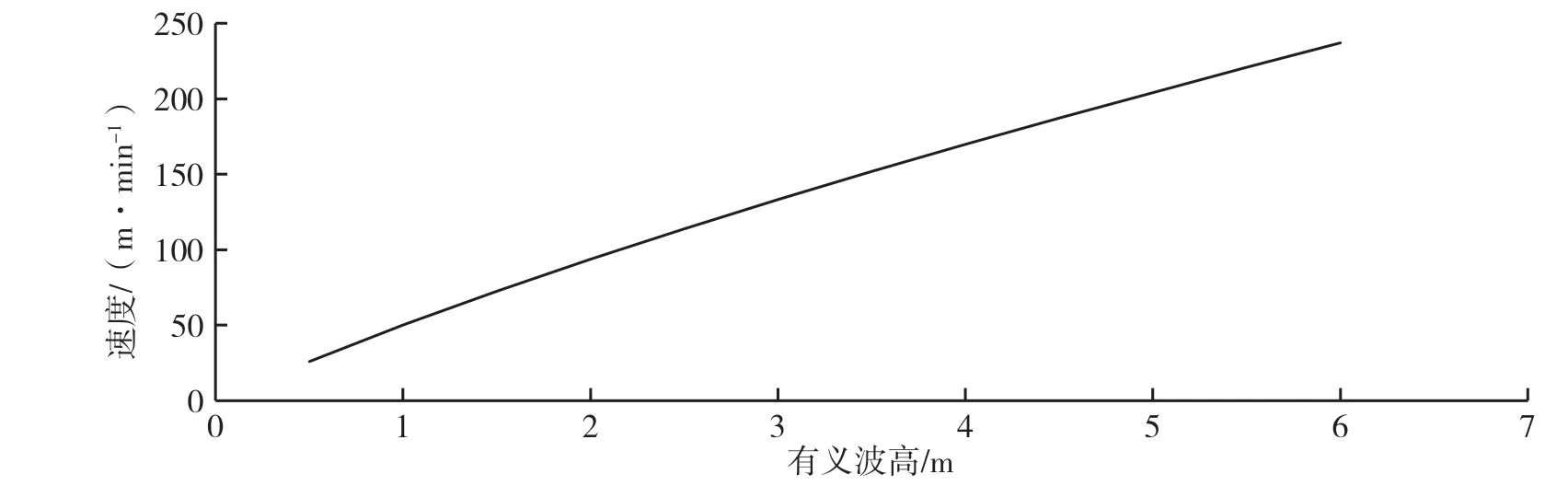
图1 自动过载保护系统要求的速度
设计时需要保证驱动系统能够使卷筒上的绳索产生足够的响应速度,单层卷筒通常只需检查滚筒外层的响应速度,多层绞车则还需检查内层的响应速度。为了保证响应速度,在设计驱动系统时,驱动部件如马达、减速器的转动惯性应足够小。一般来说,液压马达相比电动马达具有更小的转动惯性,更适合作为自动过载保护系统的驱动部件。
自动过载保护系统的意外干预可能导致负载下降,并且自动过载保护系统故障极可能导致起重机损坏,因此起重机的控制系统需要持续检查系统是否做好干预准备,检查使用自动过载保护系统是否安全。
自动过载保护系统不允许起重机不受控制地降低、释放低于额定载荷的负载以及在系统中发生单次故障时释放负载。该系统应设置起重机的运动限制,如甲板上工作区域限制或高度限制,防止当负载位于平台上方时系统被激活,从而对平台或船只造成损坏[5]。
当自动过载保护系统启动时,除人员转移功能外,吊钩的最低位限位开关、绞盘卷筒的末端停止功能以及紧急停止功能将自动失效,绳索应可以完全脱离卷筒。这些功能将在过载解除后恢复。自动过载保护系统应在驾驶室、控制站内设置控制指示器,指示器位置应固定且标注清晰。自动过载保护系统的声音信号应与其他过载保护系统的声音警告和警报区分开来,如常规过载保护系统、手动过载保护系统等。
2.3 侧臂保护系统
侧臂保护系统属于自动保护系统的一种,它是通过回转或自动释放绳索来防止吊臂超载或回转机构超载的保护系统[6]。可能导致吊臂或回转机构超载的原因有船体侧倾、负载横向摆动、大臂端头偏离负载位置、船只负载漂移等。
设计中应考虑,如果负载太大,回转驱动和制动器需要让路,制动器可能打滑,那么就要减少起重机端头的侧向力。在实际作业过程中,通常当起重机以较大的作业半径运行时,此系统功能才起作用。在最小半径下,回转的负载不高,制动器应具有足够的热容量。对于重型起重机,应避免不受控制的回转运动,避免船舶倾覆[7]。
2.4 紧急负载释放系统
紧急负载释放系统是当起重机负载超载时,由起重机操作员激活的系统。通过允许吊重绳索从起重机上拉开来降低起重机的承载,从而保护起重机免受过载和过倾覆力矩的影响。紧急负载释放系统的激活开关或手柄位置应便于起重机操作员使用,并标上黄色,防止意外使用。
紧急负载释放系统在激活时,通过松开绞盘卷筒的制动器并降低绞盘张力,或在必要时将绞盘驱动器与卷筒完全分离,从而将起吊绳索从卷筒上脱离。此时,吊钩的最低位限位开关、绞盘卷筒的末端停止功能将自动失效。
电路中的单个故障不能激活紧急负载释放系统,但是应向起重机操作员提供视觉上的指示。紧急负载释放系统应在驾驶室、控制站配备控制指示器,向起重机操作员发出连续的视觉信号,指示系统是否正常运行[8]。
3 结语
在海上起重机设计时,过载保护系统的选择应充分考虑起重机作业环境的动态情况。对于在动态海面作业的起重机,除常规过载保护系统外,还需要配备特殊功能的过载保护系统。随着时间的推移,各船级社和行业组织的规范要求会不断更新,设计人员应根据最新要求进行相关设计。
