空化区多相混合流体介质特性实验研究进展
2023-12-04王本龙张浩刘筠乔
王本龙,张浩,刘筠乔
上海交通大学 工程力学系,上海 200240
0 引言
以空泡流动为典型研究对象的自由表面水动力学是流体力学领域的特色分支,在船舶海洋工程、航天领域具有国家重大需求和国防应用背景,是船舶推进器、跨介质航行体、水下高速航行体等运载装备水动力载荷预报和综合隐身性能发展的力学基础。
空化区内部水汽掺混直接影响混合介质的密度及压力传播特性,遗憾的是,目前关于空泡内部汽泡尺度和含汽率分布的现存资料极其有限,空化流非稳定特性、空蚀和噪声等问题的力学模型和数值模拟方法与应用需求存在巨大差距。
水动力学不稳定性对空化条件下水下高速航行体有较大影响,而水动力学不稳定性的产生又与空泡内部水汽结构和相变过程相关。定量分析云空泡内部或者局部结构,尤其是含汽率和汽泡尺度分布,是研究运动波(kinematic waves)特征及其不稳定性、空泡闭合区域高湍流度、空泡溃灭、声发射和空蚀产生的脉冲等复杂问题的基础。
空泡区含汽率和汽泡尺度分布也是空蚀研究的基础。一般来说,压力波和微射流是空蚀发生的2 种主要机制。空泡在溃灭过程中会产生压力脉冲和激波,会对物体表面造成损坏,甚至能够产生闪光。微汽泡尺度是预测溃灭压强强度的基本参数。
空泡流单极子声源与空化区群泡溃灭直接相关,汽泡半径的二阶导数与声波的最大幅值紧密相关,这无论是基于Rayleigh–Plesset 方程分析还是实验测量都得到证实。相比于气核含量,汽泡数量和尺度对总噪声辐射影响更大。一旦汽泡分布确定,就可以估算总空泡噪声。
面向新一代装备研制,实际海洋环境空化流动呈现多尺度、多相、多物理场的特点。历经势流、黏流到多相湍流40 余年研究历程,当前空化水动力学研究仍面临空化区多相介质与流动特性难测量的问题,空泡流是非均匀、非平衡的气液多相湍流,水/气密度、流动尺度均跨3 个以上数量级,光学遮蔽效应强,空化区多相介质特性与流场测量手段匮乏。
云空化内部介质性质和动力学特征与工程实际密切相关,是水动力学研究领域的重点问题,但目前关于云空化的研究工作在云空化区内部特征和空泡特性定量描述等方面仍有不足。本文将从非接触式云空化实验研究、探针测量技术等方面对当前云空化区介质特性研究成果进行回顾和总结。
1 非接触式云空化实验研究技术
研究者对空泡形态和脱落结构进行了大量实验研究,获取了空泡形状、壁面压力和外部流场速度等流场信息。对于液态水与蒸汽掺混的复杂两相流动,蒸汽含量、泡群泡径分布和速度等多相混合流体介质特性是研究空化区流动的重要基础数据。空泡内部汽泡尺度和含汽率分布的现有资料很少,难以支撑高精度云空化模型的发展。为了深入认识云空化流动机理,建立有效的空化模型,对空泡内部结构定量测量提出了迫切需求。
在空化流动中,空泡界面以外或空化尾流中存在着离散分布的微汽泡,此时可采用粒子示踪测速(Particle Image Velocimetry,PIV)或激光多普勒测速(Laser Doppler Anemometry,LDA)技术进行流场测量,或者通过光学摄影方法(如全息拍摄技术)来获取微汽泡泡径大小;但在水–汽高度掺混的高含汽率空化区,由于光学遮蔽效应显著,一般的流场光学测量技术和流场图像重构方法均难以获取空化区内部介质特征与泡群信息,需采用特殊实验测量手段,如非接触式多相流测量技术等。下面介绍用于空泡内部介质特性研究的若干新兴实验测量技术。
1.1 电离辐射测量
作为非接触式测量技术,电离辐射测量主要包括γ射线和X 射线。γ射线测量精度较高,可作为其他类型测量手段的校核,如Tortora 等[1]将γ射线作为电阻抗层析成像方法的校核标准。然而,γ射线受能量强度限制较大,硬件要求标准较高,因此常规实验室测量主要采用X 射线。X 射线波长远小于可见光,可穿透遮蔽光路的介质,适用于多相掺混介质的相关测量,通过显示不同相之间的边界,可以实现多相流的阴影成像。
二十世纪五六十年代,X 射线成像技术出现在多相流研究领域,用来研究气固流化床和气液反应中的水气比。后来,X 射线成像技术被用来测量二维水翼片空泡水汽含量(Coutier-Delgosha 等[2])。为了获得非定常空泡演化的结果,瞬态时间X 射线密度测量技术也在不断发展(Mäkiharju 等[3])。Ganesh等[4]通过高速相机和高时间分辨率的X 射线测量方法研究了楔形体产生的片空化和云空化,记录了片空化向云空化转化过程中的空泡形态和含汽率分布,发现了回射流和凝结激波这2 种空泡脱落机制。Zhang 等[5-7]利用同步加速器X 射线快速成像技术,研究了文丘里试验段产生的片空泡内部结构和片/云空泡脱落机制,得到了空泡内平均含汽率分布和速度场。此外,还有其他学者也成功地将X 射线相关测量技术应用到空化的实验研究中,如Stutz和Legoupil[8]、Coutier-Delgosha[9]和Aeschlimann[10]等。然而,X 射线成像和测量技术仅能够获得空化流动在二维平面上的投影,适用于展向差异不大或展向尺度较小的流动,对于三维性较强的空化流动,则会不可避免地引入混淆和误差。此外,实验装置复杂和辐射防护要求较高的特点也阻碍了该技术的广泛应用。
1.2 内窥测量
作为光学测量手段,内窥(endoscopy)技术目前已被广泛应用于流场观测,可便捷、准确地观察各种隐蔽部位和外部光路难以进入的流场,在航空涡轮叶片和燃烧室测量、工业管线在线测量、蒸汽发生器检测等众多领域也有成熟应用。内窥镜主体包含内外2 层:导光纤维和观测光路系统。导光纤维为观测视场提供光源;观测光路系统由物镜、中继透镜和目镜以及高速摄像和PIV 测速系统组成。内窥镜主体内可实现微型化,直径在毫米量级,可以方便地进行狭小空间内(如空泡内部)的测量;高速摄像和PIV 测速系统可以对微气泡尾迹进行记录,以获得微气泡尾迹区域的流场特征。
Coutier-Delgosha 等[9]首次将内窥镜技术应用到片空泡内部汽泡形态的观测中,发现空泡内部大多数汽泡并不呈球形,且水汽掺混结构沿空泡长度方向差异很大,与原来的两相介质均匀掺混假设截然不同。此外,中国船舶科学研究中心陆芳等[11]将内窥镜与高速摄像结合,开发了实船螺旋桨的空泡观测系统,通过不同观测角和观测位置的内窥镜成功观测并记录了螺旋桨桨叶空泡和梢涡空化的形态,填补了国内实船螺旋桨空泡观测的空白。然而,通过内窥技术仅可实现两相流空间拓扑结构的定性观测,无法定量估算含汽率、汽泡尺度等信息。
1.3 其他非接触式测量技术
除电离辐射和内窥测量方法外,还有多种非接触式技术已应用于空化实验研究中,取得了一些测量结果并具有不错的应用前景。
电容层析成像(Electrical Capacitance Tomography,ECT)技术广泛应用于工业管道气液两相流空隙率测量、流化床气固两相浓度分布可视化和火焰成像等多相流在线测量。ECT 技术根据被测工质的介电常数差异,记录多对测量电极间的电场变化,通过求解反问题的层析重构算法(Marashdeh 等[12])计算出流场中的介电常数分布,进而还原各相组分分布,具有快速、安全、廉价等优势,但由于测量电极个数和尺寸的限制,其空间分辨率不高。对于气液两相流动,ECT 技术可以给出流场内部空隙率的空间分布,通过后处理也可得到相应的气泡运动规律。在因水击效应而发生瞬态空化的管道中,Adam 等[13]利用ECT 技术重构了横断面内的气液分布。ECT 技术因其技术特点而常用于管道流动测量中(如Banasiak[14]和Al Hosani[15]等),如果希望在其他空化流动中应用,则还需要对实验装置和测量方案进行改进。
磁共振成像/测速(Magnetic Resonance Imaging/Velocimetry,MRI/MRV)技术常用于医学上人体内部结构成像和石油工程中油气水多相流动[16-17]研究。磁共振成像技术的基本原理如下:物质原子核内质子在外加磁场作用下发生进动,此时发射与质子进动频率相同的射频脉冲,激发成像区域,使质子发生核磁共振;当射频脉冲移除后,被激发的共振质子经历逐渐恢复到原始状态的弛豫过程,以发射电磁波的形式释放能量,此时由采集系统接收共振质子释放的电磁波信号,根据不同物质之间弛豫时间和质子密度的差异,实现不同组织或不同相的磁共振成像[18-19]。MRI 技术已被应用于垂直上浮气泡流[20]、液滴喷雾[21]和声空化[22-23]等气液两相流的研究中。Adair 等[24]采用单点测量MRI 技术,实现了管道中水动力空化流动的含汽率和速度测量。John等[25]基于MRV 技术,测量了文丘里试验段空化流动的平均速度和含汽率分布,并分别在全湿和空化工况中由PIV 和X 射线技术进行校准和验证,发现MRV 技术测得的速度数据比较可靠,但在测量含汽率时信号损失会被湍流等因素引起的信号衰减所混淆,造成不太准确的含汽率测量结果。MRI/MRV技术对流场干扰很小,安全无辐射,且具有时间和空间分辨率较高的优势,但磁共振信号对温度条件较为敏感,且在进行成像和测量时需将流场布置在磁共振测量装置内部,对实验条件要求较高[26-27]。
此外,正电子发射粒子追踪(Positron Emission Particle Tracking,PEPT)技术同样能够实现不同相的识别成像,但尚未应用于水动力空化实验测量。以上非接触式测量技术具有广阔的发展空间,未来有望在空化区多相流体介质特性的研究中取得可靠的测量结果。
2 多相流探针技术发展现状
空化实验中的探针技术发源于化工多相流研究领域,首先应用于管道中气液两相流局部含气率测量。在20世纪60年代,在多相流含气率测量中较为流行的技术是利用γ射线或β 射线的衰减获得管道截面内的平均含气率,但该方法多用于工业界且对于非均匀流动误差较大,研究者们希望能够在实验中测量单点处的局部含气率。受气液两相流动中测量局部流动参数的探针技术(如热线探针和电容探针等)启发,Neal 和Bankoff[28]采用电阻多相流探针测量了圆管中汞–氮混合介质的体积含气率、气泡频率和气泡尺度的单点分布,输出信号为方波波形,并利用自相关函数和功率谱密度处理信号。
最早的光学探针是Miller 和Mitchie[29]设计的,采用了圆锥形的玻璃细棒尖端。Abuaf 等[30]于1978年提出了一种新形式的光学多相流探针,用来测量气液两相流动中的含气率和气泡速度:将2 根光纤熔合在一起,插入不锈钢管中,熔合部分削成顶角90°的圆锥体,即为探针传感端,2 根光纤自由端分别连接光源和光电二极管电路。该光学多相流探针是后来多相流探针和本文使用的激光光纤多相流探针的雏形(其工作原理也基本一致)。此外,Abuaf等还描述了这类单点测量光学多相流探针的基本原理和特性,研究了探针系统的电子响应和探针尖端通过气–液界面时的水动力学特性。
1991年,Cartellier 和Achard[31]回顾了二十世纪七八十年代相识别技术在两相流动研究中的应用,其中包括光学探针技术、电阻探针技术、热交换技术(热线/热膜探针)和电化学技术,并总结了多种气液两相信号的处理方法。20世纪90年代,Cartellier 及其合作者[32-38]充分发展和研究了光纤探针,使之量产化,成为气液两相流动研究中的有效测量手段;他们还提出了多种传感端形状的光纤探针,包括1C 型(Cone)和3C 型(Cone+Cylinder+Cone),并分析了不同探针的特点和优势,以及探针刺破气泡时的水动力学响应。
此外,在20世纪90年代末,利用双探头光学探针的测量方法出现,即采用2 根相互靠近的光学探针测量汽泡信号,由两根探针信号的时间延迟来获得汽泡速度和尺度信息。Stutz 和Reboud[39]首先在实验技术方面验证了双探头光学探针在测量汽泡速度、平均含汽率和水/汽流量时的有效性,给出了确定探针时间延迟和水汽信号阈值的方法,并分析了测量的不确定度和误差。随后Stutz 和Reboud[40]利用双探头光学探针研究了空泡水筒中文丘里试验段产生的片空泡流动特性,测量了片空泡内部气液两相流动的介质特性,包括平均含汽率及汽泡速度和泡径,详尽地分析了片空泡内空泡结构的动力学演化,并用片空泡内各部分的质量和动量守恒分析了空化流场的非定常性,还研究了雷诺数和空化数对空泡内部流动形态的影响。此外,还发展出了四探头探针[41-42],可以更好地捕捉气泡形状特征。
进入21世纪以来,光纤探针得到进一步研究和发展。Enrique Juliá等[43]利用高速相机拍摄了光纤探针刺破气泡的过程,研究了光纤探针对气泡流中含气率和驻留时间的测量精度,特别关注了探针尖端与气泡界面的接触角问题。Vejražka 等[44]同样在气泡上浮流动中研究了光纤探针在气泡中测量驻留时间的精度,比较了探针尖端在气泡不同位置穿刺对驻留时间测量的影响。此外,Vejražka 等还探究了光纤探针在测量含气率时引入的测量误差,但在本文关注的空化流动中,由于来流速度很大,这种影响会减弱很多。近年来,光纤探针在多种气液两相流动研究中得到了广泛应用,如波浪破碎[45-46]、稠密喷雾[47]、台阶式溢洪道滑行水流[48]和鼓泡塔[49]等。
在国内,Wan 等[50]在空泡水筒中研究了楔形台阶产生的片空化,将双探头电阻探针伸入片空泡内部和空泡闭合区,测量了含汽率、汽泡速度和尺度分布,并结合高速摄像和压力传感器研究了空化流动的动力学特征。Zhang 等[51]采用光纤探针测量了云空泡内部介质含汽率和汽泡尺度分布,探究了单个空泡脱落周期内的瞬态含汽率。近年来,电阻探针、电容探针和光学探针等接触式测量方法已逐步成为空泡区流场测量的重要手段。
总之,基于不同物理原理的接触式探针提供了简单、经济、稳定的气液两相流动测量方法,可用于动态和时均流动特征的测量。尽管接触式探针会刺破气泡并且轻微改变当地流场,但对高含气率多相流而言接触式探针仍是最合适的选择(Dias 等[52])。
为便于比较,将以上概述的各种非接触式测量技术和接触式探针方法的基本原理、测量特性和主要优缺点总结在了表1 中。

表1 空化内部介质测量技术的主要特性Table 1 Main characteristics of different techniques for cavitation mixture measurement
3 空化区内部流体介质特性
本节介绍前人利用X 射线、内窥镜、电阻探针和光纤探针等技术在空化流动中的测量方法和结果,以及空化区内部流体介质的特性。
3.1 X 射线技术测量结果
Coutier-Delgosha 等[2]通过X 射线技术测量了二维平–凸水翼空化流动中空泡内部和下游的蒸汽体积分数分布,水翼弦长c 和展长分别为150 mm 和80 mm。将160 kV/mA 的X 射线发生器和24 个接收器分别布置在空泡水筒两侧(图1),使X 射线沿展向穿过空化流动到达另一侧的接收端,通过X 射线强度的衰减程度计算蒸汽体积的瞬时值。图1 中x、y 和z 分别表示流向、垂向和展向,序号①②③为测点的3 个位置(x=2、5 和8 cm )。整套装置可沿y 方向上下移动,采样频率为1000 Hz,测量时长为30 s。
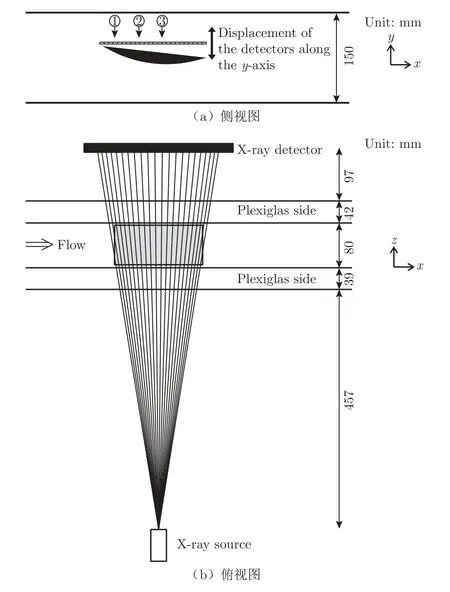
图1 X 射线发生与接收装置示意图[2]Fig.1 Schematic of the X–ray generator and detectors[2]
图2 展示了迎角4°7′、来流速度uref=6 m/s 工况下,由X 射线技术测量得到的时间平均蒸汽体积分数β分布,其中图2(a)为空泡长度l 较短的空化数σv=1.2 工况结果,图2(b)为空泡长度l 较长的空化数σv=0.8 工况结果,白色矩形框为X 射线的测量范围。需要注意的是,图2(a)和(b)中蒸汽体积分数β的刻度并不相同。为了展示β的演化特征,分别在测点位置取β分布曲线(白线),并与数值模拟结果(黑线)对比。
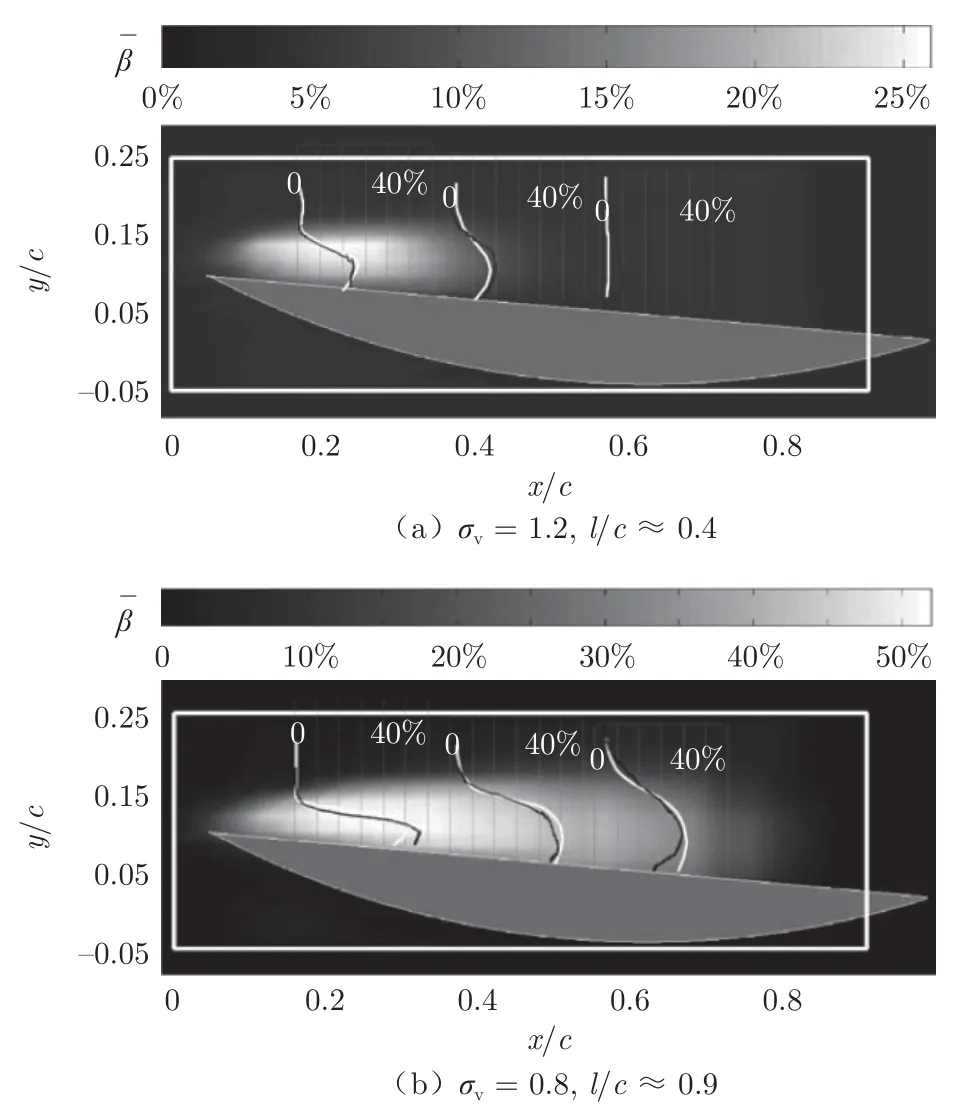
图2 蒸汽体积分数的时间平均分布[2]Fig.2 Time-averaged distribution of the vapor volume fraction [2]
从图2 中可以看到,在σv=1.2 和 0.8 工况中,的最大值分别为35%和60%,而在空泡尾流中(σv=1.2 工况,x=8 cm 位置),小于10%,在实验中也很少观察到有汽泡经过该处。的分布曲线均是靠近水翼表面较小,沿y 轴稍微增大后衰减到0,其最大值一般出现在中间高度。以上这些分布特征与不同几何外形的空化流动中用多相流探针测量结果(如Stutz[40]、Wan[50]、Zhang[51]等)非常相似。此外,通过对比可以发现,无论是的大小还是空化区的高度,数值模拟与实验结果均吻合较好。
3.2 内窥镜测量结果
Coutier-Delgosha 等[9]通过内窥镜技术实现了片空化内部两相流动结构的观测。实验采用长200 mm、直径2.7 mm 的Foretec 微型内窥镜,如图3所示。镜体通过保护套穿过空泡水筒舱体与水翼,镜头安装在水翼上表面,可实现对片空泡底部的观测且不会对空化流动造成干扰。实验中内窥镜装置位置固定,通过移动水翼模型实现对水翼上不同流向位置的观测。内窥镜视域角度为50°,焦距大于1 mm,镜体连接高分辨率CCD 相机以记录流场图像,分辨率为1300 像素×1030 像素,拍摄时通过安装在空泡水筒顶部的频闪光源照亮流场。

图3 内窥镜与视域示意图[9]Fig.3 Schematic of the endoscope and sight cone[9]
图4 给出了迎角4°7′、来流速度uref=6 m/s 工况下,内窥镜拍摄的空化区内部汽泡形态。由图中汽泡形态和分布情况可以看出:在靠近水翼前缘位置,空化内部多为尺度较大的汽泡或聚成团的小汽泡,但汽泡团很快在下游分散成许多小汽泡,这些小汽泡的尺度和形状差异很大。从图中可以看出,大部分汽泡并非球状,这说明在高含汽率的空化区内部,Rayleigh–Plesset 方程不一定完全适用。此外,空化流动的非定常性十分显著,如图4(a)中位置2(≈20%)和图4(b)中位置3(≈40%),在相同流动状态下的不同时刻(上下2 个子图)会出现完全不同的汽泡结构。
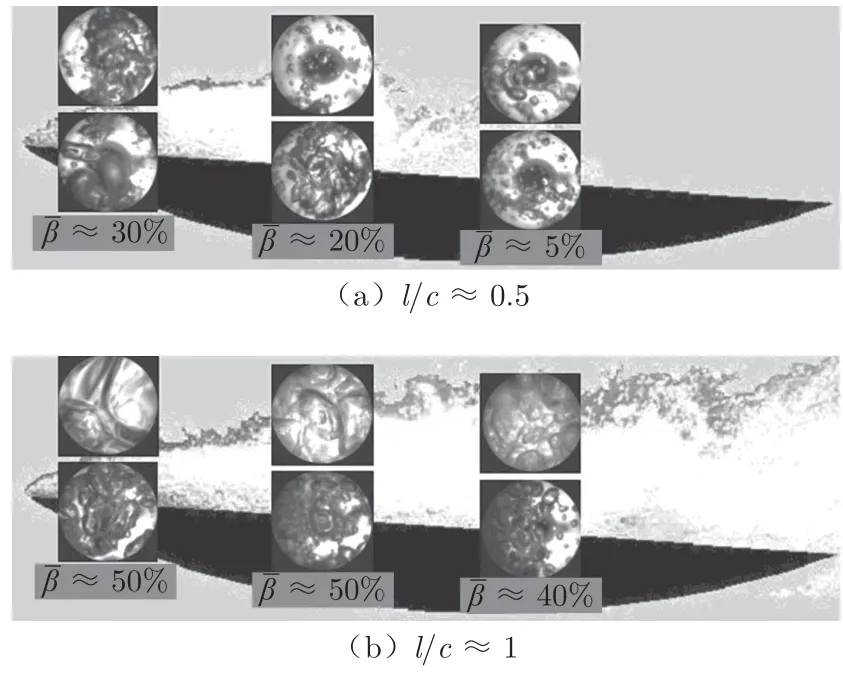
图4 空化区内部汽泡形态[9]Fig.4 Vapor bubble morphology in cavitation region[9]
3.3 多相流探针测量结果
Wan 等[50]采用电阻探针对楔形平板中的的空化情况进行了测量。水洞实验中楔形平板几何参数和探针布置如图5所示。实验中探针沿垂向(y)每隔1 mm 进行一次数据记录,直至达到空泡壁面。由于空泡厚度不等,在每个流向位置能够测量到的实验数据有20~30 组。探针测量的流向位置(#1~#4)距离楔形平板角点分别为60、120、180、240 mm。实验过程中,每个测点位置进行多次重复测量,每次测量时间大于5 s,对测量结果取时间平均获得平均含汽率。
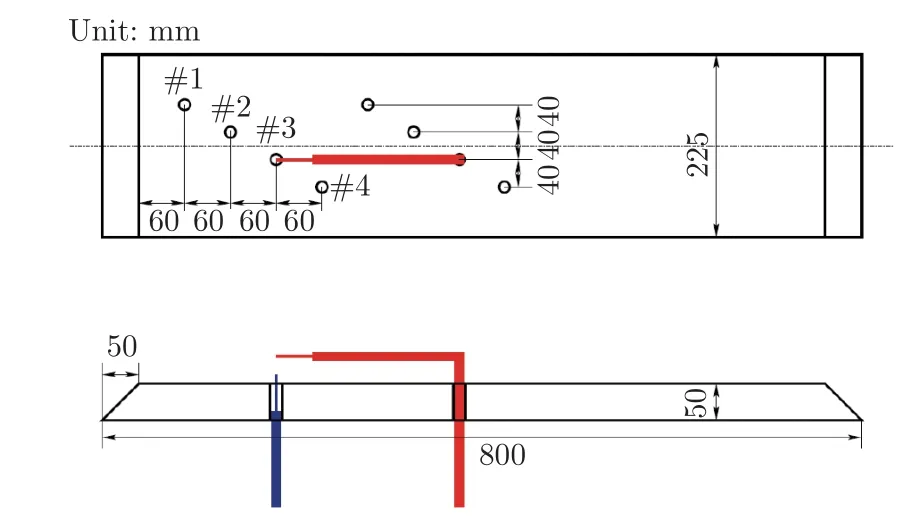
图5 楔形平板实验模型与探针位置示意图[5]Fig.5 Schematic of the wedge plate model and the positions of the electrical impedance probe[5]
不同空化数条件下片空化、云空化区域平均含汽率分布见图6,紫色实线为时间平均空化界面,是高速摄像照片二值化的时均结果,黑色实线为含汽率空间分布(蓝色刻度线表示含汽率),红色误差带为含汽率脉动标准差。如图6(a)所示,当σv=1.54,此时为超空化,空泡覆盖整个模型,在距离壁面高度超过0.012 m 的位置,含汽率接近100%。超空泡内部空间流体介质主要是蒸汽,液态水与蒸汽泡之间具有清晰、连续的交界面,这与高速摄像结果中空泡表面光滑通透现象相符。

图6 楔形平板空化中不同空化数下平均含汽率分布[5]Fig.6 Distributions of time-averaged void fraction at different cavitation numbers in the wedge plate experiment[5]
随着空化数的增加,超空泡转变为云空泡。空化数由1.60 到1.70 再到1.77,云空化区的含汽率逐渐降低,最大含汽率从60%最终降至20%,对应着高速摄像结果中水汽掺混现象的加剧。Stutz[39]和Stutz[8]等采用双探头光学探针和X 射线方法获得的非定常空化蒸汽体积分数具有相同的变化规律。对比不同文献中的多组实验发现,云空化含汽率测量结果具有良好的一致性。
从图6 中的云空化区测量结果还可以看到,最大含汽率均出现在空泡中心区域。沿空泡流向分析,靠近轮廓线尾部(即空泡溃灭区)的含汽率明显比上游低,这可能是因为较大的汽泡随着片空泡的溃灭和压力恢复,体积逐渐减小,含汽率也随之降低。
Zhang 等[51]进一步采用激光光纤探针对非定常水翼云空化进行了测量研究。对于弦长为150 mm的水翼,设置了2 条测量线,如图7(a)所示,分别位于水翼尾缘上游1/3 弦长处(记为测量线a)和水翼尾缘处(记为测量线b)。各测点间距为1 mm,且从水翼表面下方1 mm 处开始测量,直到测点平均含汽率小于探针测量精度。根据60 s 内采集的水汽信号,计算出测量线a 和b 上每个测点的平均含汽率。再将平均含汽率按测点空间位置排布绘制出平均含汽率剖面曲线,该曲线可以反映不同测量线上水汽混合介质的空间分布性质。将不同空化数(σv=1.00、1.22 和1.43)下的平均含汽率剖面绘制在一起,结果如图7(b)所示。在图7 中,垂向位置由一个局部坐标系确定,坐标原点位于对应流向位置的水翼下表面处。

图7 水翼空化中平均含汽率测量结果[51]Fig.7 Distributions of time-averaged void fraction in the hydrofoil experiment[51]
由测量线a 的结果可知,σv=1.00 工况的平均含汽率是最大的。靠近水翼表面2 个点(1 和2 mm)的平均含汽率均在30%以下,明显小于空泡核心区,与Stutz 等[40]的楔形平板实验测量结果吻合。这是因为空泡演化过程中周期性出现的回射流在壁面与空泡之间引入了液态水的薄层,使测点在长时间段内的平均含汽率明显下降。在σv=1.00 工况的含汽率剖面上,空泡核心区若干点(3~12 mm)的平均含汽率大于30%,随着测点位置进一步远离壁面,平均含汽率迅速降低。当σv=1.22 时,测量线a 上只有2 个测点平均含汽率在30%以上,此时测量线a 刚好位于片空泡闭合的位置,该线上大部分测点采集的是空泡周期性卷起和脱落过程的信号,仅有一部分点会周期性地位于片空泡闭合区以内。当σv=1.43 时,测量线a 上所有测点平均含汽率都较小,最大不超过3%,此时测量线a 大部分时间位于液相中,只有当云空泡经过时才能测量到气相信号,因此该位置各点平均含汽率都较低。在测量线a 上,无论空化数是多少,平均含汽率剖面在靠近水翼表面的位置都存在一个低值区,这是因为受到了壁面限制和回射流发展的影响。
在测量线b 的结果中,3 个空化数下的平均含汽率均明显减小,数值大小为0~10%。空化数为σv=1.00 和1.22 时,光纤探针在测量线b 上采集到周期性明显的云空泡水汽信号,其中σv=1.00 工况的平均含汽率更高。当σv=1.43 时,各点平均含汽率均小于0.1%,表明云空泡已经发生溃灭,此时在测量线b 上,光纤探针捕捉不到明显的汽泡信号。不同于测量线a 的结果,测量线b 的平均含汽率剖面并没有明显的先增大后减小的趋势,这是因为测量线b 在水翼尾缘位置,水翼表面不再具有很强的限制作用。
综上所述,云空化区内是水汽掺混介质,含汽率与空化数强相关,与超空泡和片空化区域充满蒸汽的状态截然不同。
空泡溃灭是空泡噪声和空蚀的主要原因,准确获取空化区汽泡尺度是分析汽泡动力学的基础。多相流探针可获得空化区水汽信号的时间历程,通过分析采样信号幅值可获得汽泡尺度的统计量。
Wan[50]和Zhang[51]等采用概率密度函数来研究汽泡尺度分布,概率密度函数的参数可以对各个测量位置的汽泡尺度进行统计性的描述。由于小泡径汽泡数往往较多,且汽泡数随着泡径增大而减小,因此选用一种右偏态函数(即对数正态分布函数)来拟合实验测得的汽泡半径数据。对数正态分布函数的形式为:
式中:参数µ为直径对数lnd 的平均值,反映了汽泡尺度分布的平均水平;参数σ为直径对数lnd 的标准差,反映汽泡尺度分布的离散程度。这2 个参数是由统计分布得到的最重要结果,可以直接用于云空化流动中汽泡尺度分布的数值建模。
图8(a)给出了楔形平板空化实验中由电阻探针测量得到的空泡闭合区域汽泡尺度分布,其中蓝色圆圈为σv=1.60 工况各测点的分布结果,绿色十字为σv=1.77 工况结果,灰色虚线则为两工况不同测点间的平均结果。可以看出,楔形平板空化实验中空泡闭合区域的汽泡尺度分布较为统一。图8(b)为水翼空化实验在测量线a 的σv=1.00 工况下,由光纤探针测量得到的汽泡尺度分布结果。其中,曲线颜色表示测点对应的垂向位置,随着测点远离水翼表面,曲线颜色由深变浅,如图例所示。在不同测点,汽泡尺度分布中的总体汽泡数目存在巨大差异,但在概率密度函数计算过程中进行的归一化处理消除了这种差异,使各个测点的汽泡尺度概率密度呈现非常一致的分布。由图8(b)可以看出,概率密度曲线峰值(灰色阴影部分)集中在泡径1 mm 附近很窄的范围内,说明2 种空化流动之间存在非常相似的汽泡尺度分布。此外,σv=1.22 工况也有类似的结果。
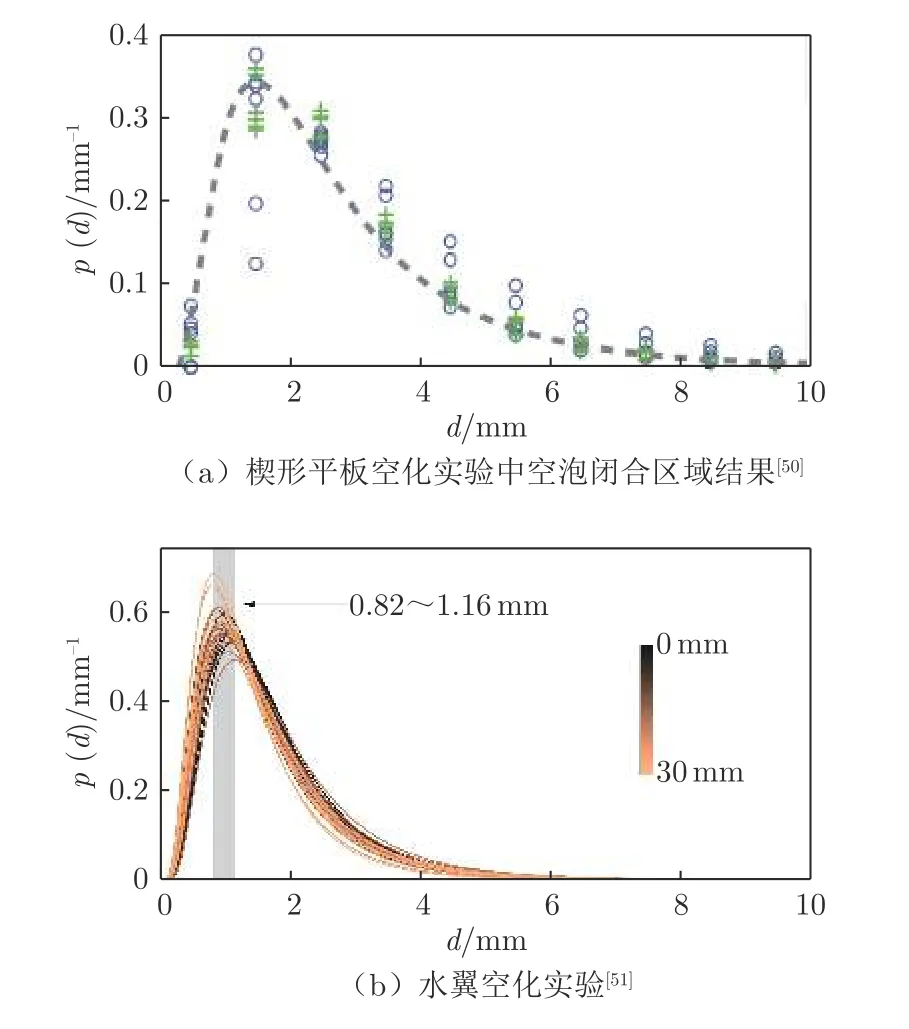
图8 空化区汽泡尺度分布测量结果Fig.8 Bubble size distribution within the cavitation region
因为概率密度函数的特征参数µ和σ可以概括性地描述汽泡分布平均尺度和离散程度,刘等[53]通过简单对比这2 个参数来比较2 个不同空化实验的汽泡尺度分布结果。图9 为不同空化数下参数µ和σ的平均值和,其中σv=1.60 和1.77 工况为楔形平板空化实验中电阻探针的测量结果,σv=1.00 和1.22 工况为水翼空化实验中用光纤探针测量的结果。从图中可以看到,和的变化范围都比较小,说明在不同空化数、不同形式的空化流动中,都存在较为一致的泡径分布。尤其是参数在2 个实验结果中高度一致,说明2 种云空化流动中泡径分布的特征非常相似。
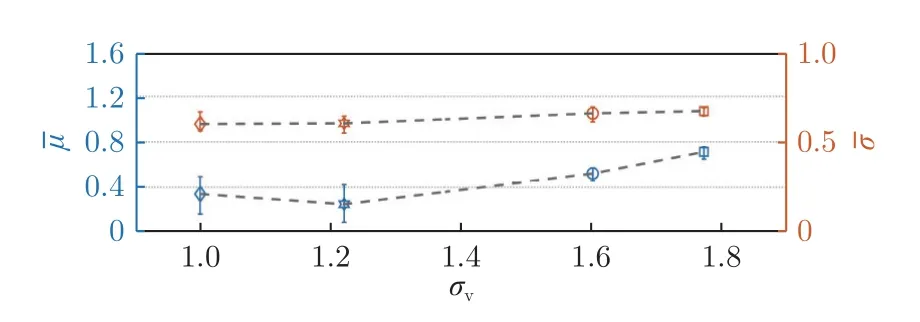
图9 不同空化数、不同形式空化流动中µ和σ 平均值的变化[53]Fig.9 Variations of the mean values of µ and σ in different cloud cavitating flows with variable cavitation numbers[53]
4 总结与展望
本文主要回顾了空化区内部介质特性测量的实验技术,包括非接触式的电离辐射技术和内窥测量技术,以及接触式的多相流探针(电阻探针和光纤探针)测量技术,介绍了主要实验技术的测量结果,并重点讲述了近年来探针方法应用于空化区内部介质测量的实例。主要结论如下:
1)由于空化介质对光路的遮蔽,对于含汽率较高的空化区域需要采用特殊实验方法进行测量,包括非接触式和接触式测量技术,其中接触式探针方法具有更好的适用性和稳定性。
2)借助电阻探针和光纤探针,可有效提取空化区内部的水汽掺混特征,获得含汽率和汽泡尺度分布等信息,由云空化内部含汽率的空间分布可知,其多相混合介质不同于充满蒸汽的超空泡和片空泡区域。
3)通过对比楔形平板和水翼产生的2 种不同空化流动,可以发现二者泡径统计分布的特征参数相近,表明这2 种空化流动中汽泡尺度分布较为一致,可用相同分布律函数描述空化区汽泡尺度分布。
空化区内部介质的实验研究还有非常广阔的发展空间,在此提出几点对未来工作的展望:
1)需开展多种几何外形(如平直水翼、扭曲水翼、Venturi 管、楔形平板等)条件下的空化流动实验测量,建立更为丰富的空化区多相混合介质特性数据库。
2)开展空化流动及其内部结构的多物理场(包括空化流体介质特性、压力脉动、噪声等)同步测量,分析空泡发展和溃灭机理,建立空泡区内部介质特征与噪声特性的联系。
3)加强非接触式的先进实验技术(如ECT、MRV 和PEPT 等)在空化机理研究中的应用。
4)考虑多相流探针技术中接触过程修正、非球形泡影响及统计分析等问题,进一步提升多相流探针的测量精度。
