红外分子标记测速法
2023-12-04胡臻宋子豪王巍添朱宁超星
胡臻,宋子豪,王巍添,朱宁,超星,*
1.清华大学 能源与动力工程系,北京 100084 2.清华大学 航天航空学院,北京 100084
0 引言
实验流体力学作为流体科学发展的方向之一,对理论流体力学和计算流体力学起到了物理现象预测和实验数据支撑的作用,是研究和理解复杂流动物理的关键工具。随着理论物理模型和数值计算方法的发展,流动问题的计算结果所包含的信息越来越丰富,从而对流体实验方法的测量精度、时间分辨率和空间分辨率等性能提出了更高的要求。传统的接触式流体测量方法,如皮托管和热线风速仪等,因为成本低、使用简单、响应快速等优点受到实验流体力学研究者的广泛青睐。然而,受测量原理的限制,这些接触式方法在测量时需要将物理探头侵入到待测流场中,这往往会给流场带来干扰,从而影响测量结果的准确性,且在多空间点同时测量时往往需要布置更多的探点,从而进一步增大了测量的系统误差。因此,发展具有非侵入式、高时空分辨、单次多点同时测量、速度与标量同时测量等特性的流场测量方法,是拓展流体测量方法应用范围、研究复杂流动现象的重要需求。
近年来,许多基于光学与激光的新型流体速度测量方法得到了广泛的理论和实验研究,旨在实现多空间维度、多尺度湍流结构所主导的复杂流动中的非侵入性测量[1-3]。激光多普勒测速[4](Laser Doppler Velocimetry,LDV)和可调谐二极管激光吸收光谱测速法[5]( Tunable Diode Laser Absorption Spectrometry,TDLAS)基于运动产生的多普勒频移来进行速度测量,主要用于单点测速,难以在复杂流场中实现流动可视化。基于示踪粒子位移的测速方法,如分子标记测速法[6](Molecular Tagging Velocimetry,MTV)、粒子图像测速法[7](Particle Imaging Velocimetry,PIV)和粒子跟踪测速法[8,9](Particle Tagging Velocimetry,PTV)等,通过跟踪示踪分子或粒子在不同时刻的位移,可以实现二维甚至三维的流动速度成像。不同于PIV 和PTV 中示踪粒子的标记依赖于粒子通过光散射形成的图像,MTV 中示踪分子的位置一般通过激光选择性激发流场中的共振分子及随之受激发分子的自发辐射确定,这导致MTV 方法具有2 个特点:一是不需要引入示踪粒子而利用分子示踪,减少了强涡或层流边界层中的示踪粒子分布不均匀性[10]、气相和加速流体中示踪粒子的重力诱导速度和速度滞后[11-13]等由于示踪粒子引入导致的测量系统误差,同时避免了测量时示踪粒子对测试设施的污染及壁面反射的强光信号污染;二是其捕捉到的信号光为激光诱导发光,除了信号光强的空间分布信息外,激光诱导发光还包含了丰富的激发分子光谱信息,从而可以在速度测量的同时对流场中的温度、压力和浓度等标量信息实现具有空间分布的成像测量[14]。
鉴于MTV 方法在流动显示测量中的诸多优势,基于不同示踪分子和标记方案的多种MTV 方法被用于各种特性的流场中,如羟基标记测速法[15]、NO 标记测速法[16]等。在这些标记方法中,分子被激光激发至电子激发态并随后向下能级自发辐射产生电子态荧光信号,由于电子态荧光寿命短,这些标记测速法多用于高速和超声速流动测量。而在低速流动中,寻找一种寿命长的激光诱导发光过程十分重要。一种途径是寻找自发辐射系数更小、发光效率更低但发光寿命大大延长的磷光分子,如磷光超分子[17]或联乙酰分子[18]等。但这些磷光分子大多具有毒性,从而限制了其在实际环境中的应用。另一途径是利用瞬时功率更高的飞秒激光实现多光子非线性激发过程,如利用飞秒激光电子激发标记(FLEET)对测量气流中的氮气分子进行标记[19],或利用激光诱导拉曼电子激发标记(RELIEF)对测量气流中的氧气分子进行标记[20],从而获得寿命更长的荧光信号。但是目前此类方法仍受设备复杂、非线性激发和荧光效率低等因素的限制。
因此,寻找一种无毒无害、设备布置简单、能适用于低速气流场以替代PIV 并提高流场成像精度的方法很有必要。本文设计了一种只需单激光器激发和单相机收集的新型MTV 激发和分子标记方案,利用波长为2 µm 的红外脉冲激光光源选择性激发气相流动中二氧化碳(CO2)分子的振动态跃迁,并利用红外相机收集激发CO2分子荧光,追踪标记分子随流场的运动。另外,对目前红外MTV 的测量指标进行了评价,并分析了影响此方法时空分辨率和测量精度的主要因素及改善方向。最后在轴对称喷嘴射流中,利用此方法测量了空间分辨的一维速度径向分布,验证了此方法用于速度测量的可行性。
1 理论基础
1.1 红外MTV 测速原理
传统MTV 通常通过“写入信号,读取信号”2 步进行速度测量。其中“写入信号”常采用紫外光或可见激光,对应于激发示踪分子的高能电子态,其荧光寿命通常为纳秒量级。由于选择的速度测量原理为u=Δx/Δt,因此可见大小的Δx与极短时间Δt 对应很高的流速u,即传统MTV 在气体流场中常用于超声速量级流速的测量。而本文介绍的红外MTV 采用CO2分子的振转光谱作为示踪荧光,对应于微秒量级的荧光寿命,极大降低了速度探测极限,可满足低流速边界层测量条件。
本文选用波长2 µm 的脉冲激光将处于振动基态(v1=v2=v3=0)的CO2分子激发至某一振动激发态(v1=2,v2=0,v3=1),其中vi表示分子的振动模式i 对应的振动量子数。处于振动激发态的分子会通过自发辐射和碰撞淬灭过程向下能级跃迁,如图1所示,其中蓝色箭头表示激光激发过程,红色箭头表示荧光过程,黑色箭头表示淬灭过程。实验中通过在相机内布置窄带带通滤波片,使4.26 µm 波长附近的自发辐射(Δv3=-1)光被收集,滤掉激光散射和红外热背景辐射。由于图1 中3 个上能级跃迁得到的荧光波长相近(即红色箭头对应能量),且本文主要利用荧光的强度空间分布信息进行速度测量,所以不需要分析荧光的各能级贡献和详细光谱结构。值得注意的是,后续如进行温度、压力等标量场测量,应进一步考虑这些不同上能级的荧光贡献和差别。
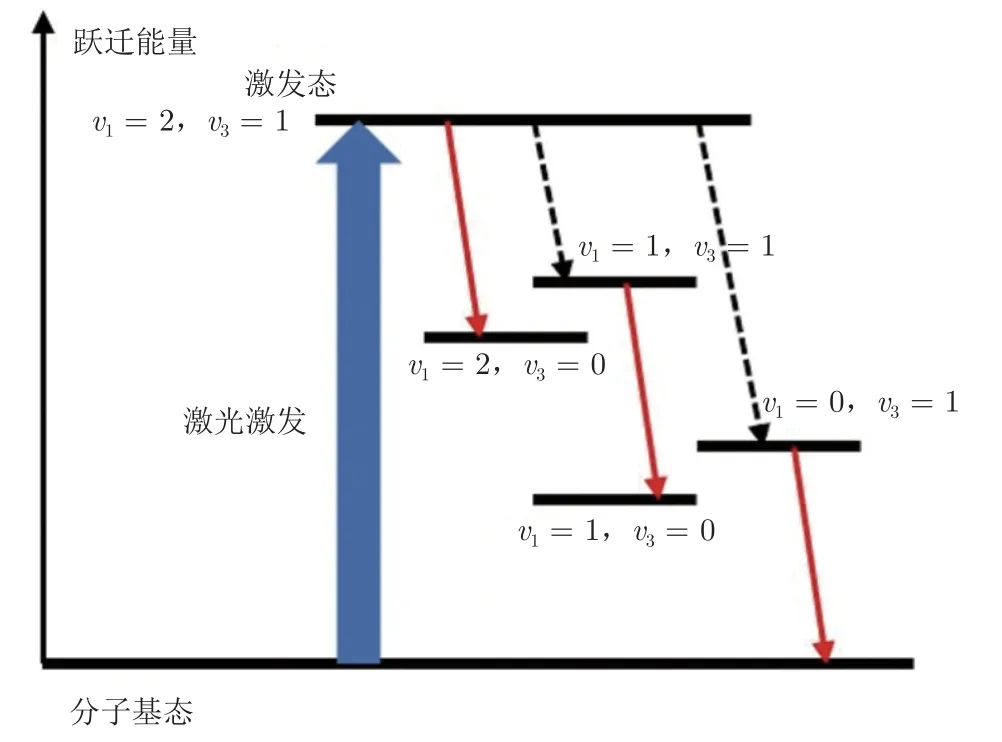
图1 红外MTV 中振动能量跃迁过程示意图Fig.1 A schematic diagram of vibrational energy transition in infrared MTV
MTV 测量中不同时刻(t0~t2)的荧光分布图像如图2所示,分析不同时刻的示踪分子位移可以处理得到速度。与PTV 不同,MTV 无法做到对示踪分子的实时追踪,故分析标记位移可以利用图像中心位置识别算法或不同时刻图像最大相关算法。在本文中,由于荧光强度本身较弱,主要噪声来源为相机散粒噪声(即激光散射和红外热背景辐射),使用最大相关算法等方法计算得到的速度与直接采用荧光强度拟合方法相比几乎不存在优势,因此速度测量采用中心位置识别算法。
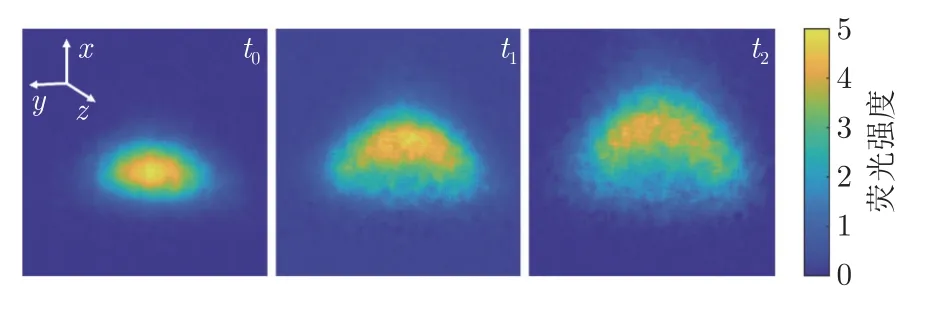
图2 不同时刻的CO2 荧光分布随流体运动的变化Fig.2 The evolution of CO2 fluorescence distribution with fluid motion at different times
为了寻找表征荧光强度分布及演化的函数形式,并准确地确定强度分布中心,假设荧光强度与CO2分子浓度成正比,考虑分子扩散影响和激发态向下能级跃迁,轴对称射流中的激发态CO2分子浓度C 的控制方程可表示为:
式中:D 为CO2分子扩散系数,τ为激发态CO2寿命,u为射流轴向速度分量,x、y、z 方向如图2所示。值得注意的是,y 方向荧光分子浓度梯度远小于x 和z 方向,因此其二阶偏导在式1 中略去。初始时刻的激发态CO2空间分布与激光光束强度在垂直激光传播方向的分布一致,为高斯分布:
式中:w0为激光束腰尺寸,x0和z0为激光在测量位置的初始坐标,t0为初始时刻。考虑对垂直图像方向(即z 方向)的荧光强度进行积分,由式(1)和(2)可以解出荧光信号强度s的分布为:
这表明考虑了扩散和荧光寿命等因素的影响后,荧光强度分布仍为近似的高斯分布,不过其强度随时间的变化会受到荧光衰减的影响。本文利用高斯函数拟合,得到不同时刻的荧光分布中心位置xc(t),然后再处理得到轴向速度u。
1.2 轴对称圆形喷嘴射流的速度径向分布
轴对称射流作为少数几种可以被分析和求解控制方程的流动类型之一,其流动结构被广泛地研究[21-22]。虽然射流的湍流特性和传递仍在被研究,但射流时均轴向速度的径向分布已经在理论和实验上得到了深入的研究并取得了成熟的结果。除了理论成熟、研究充分外,轴对称射流的另一个特点是在充分发展后其时均轴向速度的径向分布具有自相似性,即速度分布特性与雷诺数Re 和喷口结构无关。这一点对于一个验证方法的实验工况十分有利,因为这会减少流量和雷诺数控制不均匀带来的误差。因此,我们选择使用轴对称射流这一经典流动作为标准参考,对本文发展的红外MTV 方法进行验证。Abramovich[23]和Rajaratnam[24]等总结了多种雷诺数、喷嘴结构和不同下游截面位置射流速度分布的实验数据和理论结果:在喷嘴下游较近的截面,射流仍处于发展和过渡阶段,此时在射流的中心区域会存在一个恒定的速度最大值,且该区域的尺寸随着截面距喷口距离增加而变小;在喷嘴下游较远的截面,射流得到充分发展且时均轴向速度的径向分布具有自相似性。Goertler 和Reichardt 从理论和实验将自相似分布规律描述为[24]:
式中:无量纲长度ξ=ζr/xcs,其中r为测量点与射流中心的径向距离,xcs为测量截面与喷口平面的距离,ζ为实验确定参数(取18.5);uc为截面内最大轴向速度。
2 实验与装置
红外分子标记测速法的实验验证装置如图3所示。使用定制的掺钕钇铝石榴石(Neodymiumdoped Yttrium Aluminium Garnet,Nd:YAG)激光器泵浦的光参量振荡(Optical Parametric Oscillator,OPO)激光系统产生标记CO2分子所需的红外激光。1 个Nd:YAG 激光器的1.064 µm 波长光子通过非线性晶体后会产生2 个波长分别在2 和2.35 µm附近的低频光子,其中2 µm 波长激光输出被用来激发CO2分子的2v1+v3的组合振动态。该激光系统的运行重复频率为20 Hz,2 µm 波长单脉冲激光的能量可达9 mJ。使用焦距为+200 mm 的氟化钙球凸透镜来调整激光准直,使激光束腰聚焦在测量区域,以提高功率密度和空间分辨率。红外相机(Fast M200,Telops Inc.)内置汞镉碲(Mercury Cadmium Telluride,MCT)红外传感器,相应波长范围为2.5~5.3 µm,用来对激发态CO2分子发射的4.26 µm荧光进行成像。该相机可以在200 Hz 的帧率下进行640×512 的全帧尺寸成像,具有16 位输出动态范围。本文通过增加像距以实现更高的空间分辨率。红外相机内部装有窄带带通光学滤波器(Spectrogon Inc,中心波长4.26 µm,透射窗口半宽0.105 µm),以减少激光散射和红外热背景辐射,保证足够宽的光谱窗口使荧光信号信噪比最优。
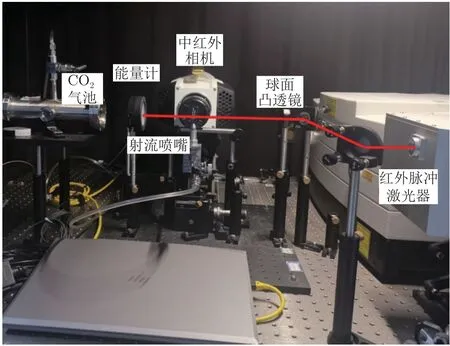
图3 红外MTV 测量实验装置与射流喷嘴装置Fig.3 The experimental setup of infrared MTV and jet nozzle
实验中使用的激发光与相机时序如图4所示。相机在激发光脉冲10 µs 后触发,即延迟时间为10 µs,相机的曝光时间为10 µs,即覆盖激发光后的10~20 µs。
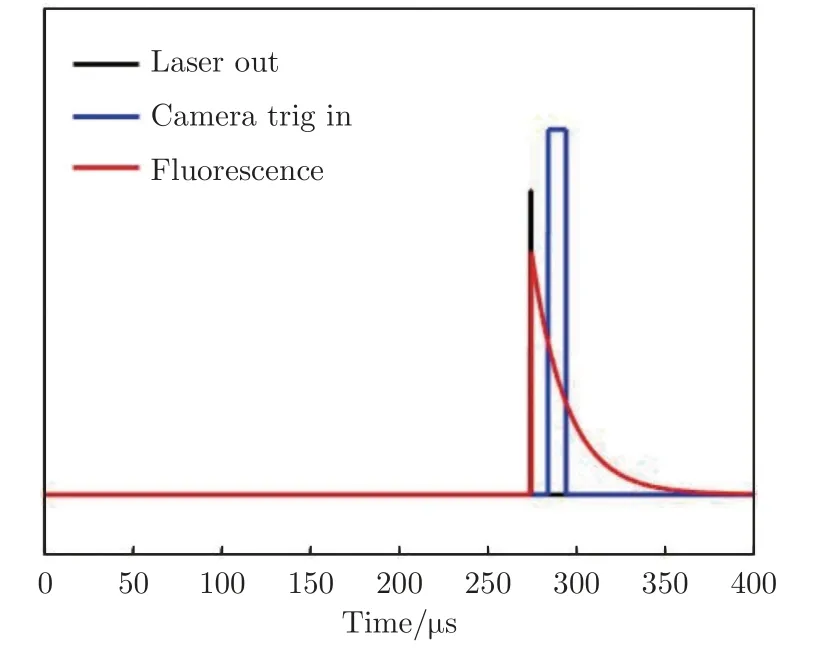
图4 激发光、相机时序图与曝光窗口示意图Fig.4 Sequence diagram of excitation light and camera,and exposure window diagram
实验中CO2射流通过一个直径d0=1 500 µm的圆形喷嘴产生,使用的CO2气体纯度为99.9%。气体流量由质量流量计控制,且每次测量前利用皂膜流量计对质量流量计进行标定。喷嘴的水平位置由一个二维精密位移台调节,以确保射流中心与测量光束重合;喷嘴截面和测量截面之间的相对高度由一个高度平移台控制,控制精度可达80 µm。
3 结果与讨论
3.1 CO2 分子吸收截面测量与成像系统空间标定
根据Beer–Lambert 定律,当激光与分子跃迁共振时,吸光度A 与分子光谱参数之间的关系可表示为:
式中:透射光强It和入射光强I0的比值It/I0表示光透射率,σ为分子在激光波长处的吸收截面,X 为分子的相对体积分数,n为分子数密度,L 为吸收光程。由于该实验系统中使用的固定波长激光器无法进行谱线扫描,所以利用已知环境和吸收光程的气体吸收池中CO2与N2气体的透射光强比来确定吸收截面,如图5所示。本次实验中L=18.45 cm,n=2.56×1019molecule/cm3,测得目前激光波长下CO2分子吸收截面σ=4.454×10-22cm2/molecule,可实现良好的荧光图像捕捉。
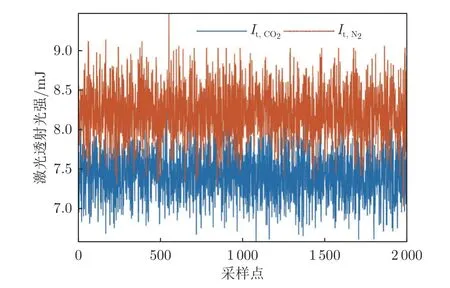
图5 激光通过N2 和CO2 气体池后的透射光强Fig.5 Transmitted laser intensity through N2 and CO2 gas cell
位于红外相机焦平面处的标定尺在相机中的成像如图6所示,标定可得实验中红外相机成像放大倍率为10.71 微米/像素。通过10~100 µm 直径的系列金属丝加热成像,估计出在安置带通滤波片后的红外相机在本次测量中空间分辨率为4.05 像素(即43.34 µm)。
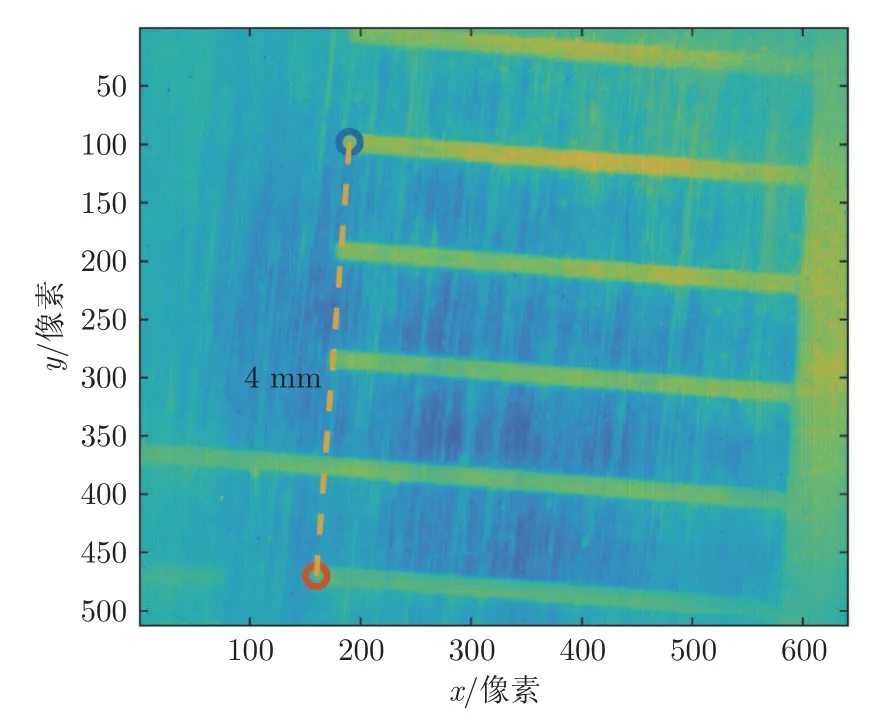
图6 红外相机成像尺度标定Fig.6 Image calibration of infrared camera
3.2 不同高度截面的轴向速度径向分布测量
为了验证红外MTV 在微小尺度流场中的高空间分辨速度成像能力,实验在喷嘴直径1 500 µm、雷诺数2 500 的射流中进行。测量得到的标记CO2分子随射流运动的位移如图7所示,其中标记的初始位置以蓝色方点表示,18 µs 后的标记位置以红色圆点表示。可以看出,随着测量位置向射流下游移动,可以被标记和处理的CO2分子在径向上逐渐变宽,这是由于在射流中的CO2受扩散和滞止环境空气的卷吸影响,进而导致CO2的径向分布范围随着射流向下游发展而变大。随着测量位置向下游移动,跟随射流移动的标记分子分布变化更加平缓,且在喷嘴下游16 mm 处,射流中心标记分子的位移也明显减小,即射流中心最大速度降低。图7 中相邻两测量点对应的距离为图像中1 像素的大小(即10.71 µm),但红外MTV 的测量空间分辨率还受相机实际空间分辨率的影响。
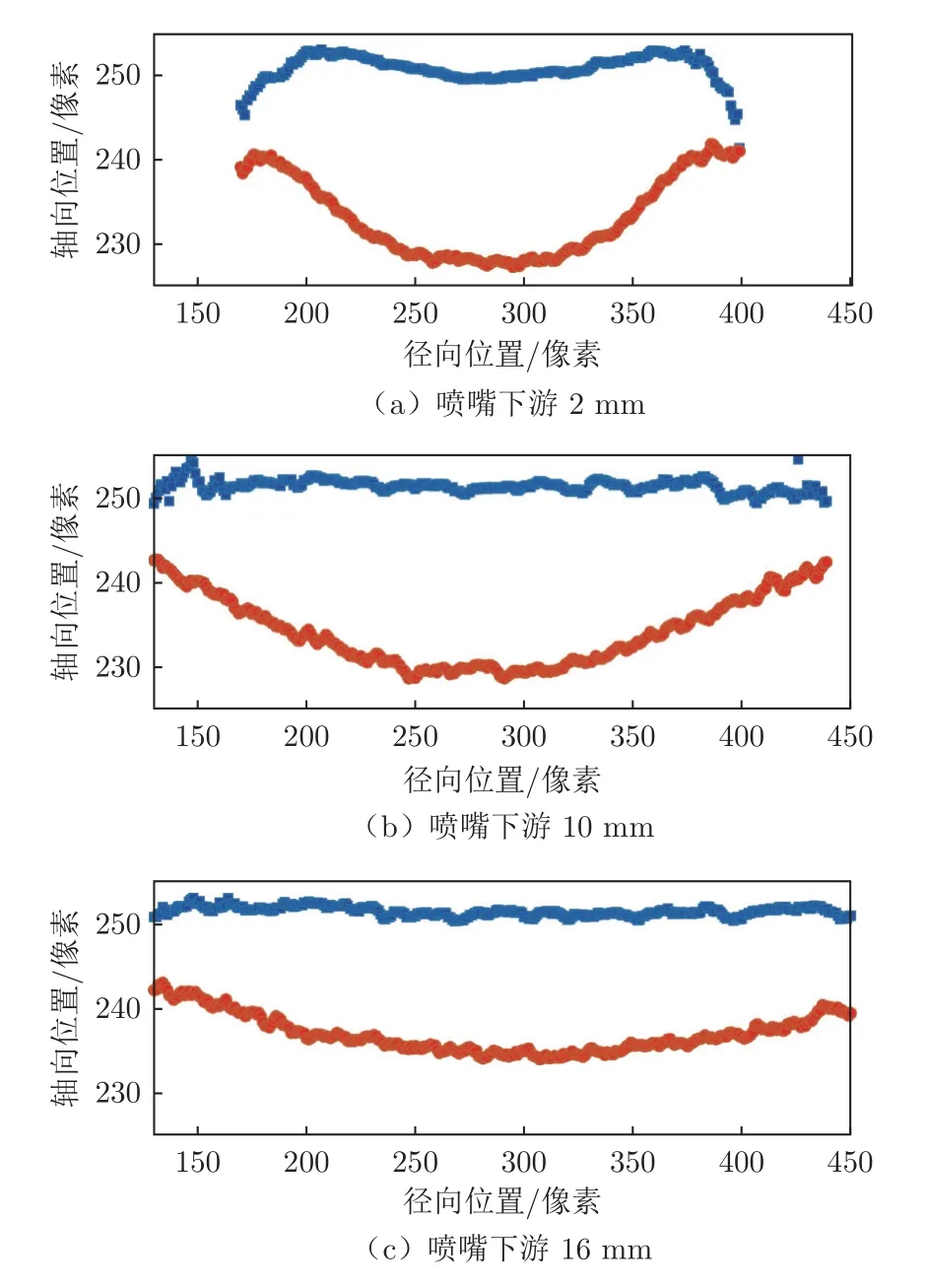
图7 Re=2 500 射流中不同轴向位置的红外MTV 标记位置测量Fig.7 Infrared MTV marked position measurement at different axial positions in jet at Re=2 500
结合图7 中的结果,处理得到3 个轴向位置(喷嘴下游2、10、16 mm)的速度分布如图8所示:3 种工况测得的速度分布对称,且在最靠近喷嘴的下游2 mm 工况,射流中心位置存在射流势核区,其中轴向速度恒定,约为13.2 m/s;在下游10 mm 工况中,射流中心速度与下游2 mm 工况相同,仍保留部分势核区但分布半径变小,势核区外的速度随半径增大而减小的趋势变缓;在下游16 mm 工况中,势核区消失,射流中心最大速度变为10.5 m/s 且速度在径向的梯度更小。以上结果与轴对称射流的理论定性描述相符合[23]。
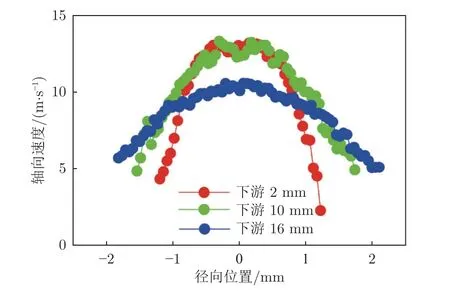
图8 Re=2 500 射流中不同轴向位置的轴向速度径向分布测量结果Fig.8 Measured radial distribution of axial velocity at different axial positions in jet at Re=2 500
3.3 轴向速度径向分布自相似性验证
为了进一步定量验证红外MTV 用于速度场测量的可行性,并进一步评估该方法的特征指标,后续测量选择在湍流轴对称射流的自相似区进行。自相似区内的无量纲速度分布独立于喷嘴结构、雷诺数大小等因素,有成熟的理论和广泛的实验结果可以对照。在射流喷嘴下游18 mm 位置(xcs/r0=24,r0为喷嘴半径),Re=10 000、20 000、30 000 的3 种工况下,速度测量结果如图9所示。采用10 像素的平滑窗口对数据进行平滑处理,等效测量空间分辨率为107 µm。

图9 不同雷诺数工况射流在自相似区的轴向速度测量结果及理论结果[25]对比Fig.9 Comparison of measured and theoretical results[25] of axial velocity distribution at self-similar zone of jet flow,under different Reynolds number conditions
从图9 中可以看到,无量纲轴向速度分布与雷诺数无关,且与式(4)得到的速度分布结果符合较好。3种工况的射流中心最大轴向速度uc与雷诺数呈线性相关且相关度R2=1,实验中测量点最大轴向速度为50.5 m/s。3 种工况下所有空间位置的速度测量结果不确定度都优于8%,表明了红外MTV良好的定量性。
4 结论
本文基于CO2分子的红外激光诱导荧光过程,搭建了一种能够应用于低速气流场的红外分子标记测速法,突破了基于荧光的分子标记测速法应用于低速气流场时存在的限制。本文分析了CO2激光诱导荧光过程的跃迁过程和吸收跃迁效率、标记中心处理方法、分子扩散等因素对标记中心确定的影响,在轴对称射流的不同轴向位置开展了轴向速度的径向分布测量,并利用湍流射流自相似区的速度分布测量结果定量地验证了红外MTV 用于速度测量的可行性。结论如下:
1)实验利用的2 µm 红外脉冲激光的CO2分子吸收截面σ=4.454×10-22cm2/molecule,可实现良好的荧光图像捕捉。实验系统中的主要噪声来源为激光散射和红外热背景辐射(即相机散粒噪声),通过在相机内安装带通滤波片可以有效地抑制噪声。
2)本文中实现了红外MTV 在微小尺度流动中的空间分辨测量,测量的射流由一个直径1 500 µm的圆形喷嘴产生,测量的速度范围为5~51 m/s。本次测量中红外MTV 的等效空间分辨率为107 µm,时间分辨率为0.05 s,速度测量不确定度优于8%。
3)在射流轴向速度分布测量中,随着研究的轴向截面向下游发展,轴向速度分布的变化主要为势核区缩小、消失,以及轴向速度的径向梯度减小;在射流喷嘴下游位置xcs/r0=24,Re=10 000~30 000的湍流射流都已发展到自相似区,无量纲轴向速度与理论预测相符合。
