远洋鱿鱼钓船阻力图谱研究
2023-11-30李铁骊,佟孟垚,陈一硕,周燹,黄珍秋
李 铁 骊, 佟 孟 垚, 陈 一 硕, 周 燹, 黄 珍 秋
( 大连理工大学 船舶工程学院, 辽宁 大连 116024 )
0 引 言
在新船型开发和方案设计过程中,船舶阻力估算是否准确对船-机-桨配合设计以及船舶快速性预报有较大影响.目前,船舶阻力预报方法主要有船模试验、理论研究、近似估算和CFD法等,其中船模试验法和CFD法都存在耗时长、工作量大等缺点[1-3].在船舶概念设计和初期方案设计阶段,由于船舶型线尚未确定,还不能应用船模试验或者其他方法确定船舶阻力,只能用近似方法进行估算[4].近似估算法又可分为经验公式估算法、船模系列资料估算法和母型船数据估算法.船模系列资料估算法是根据船模系列试验资料,直接给出阻力图表供实际参考使用,可以分为回归公式估算法和阻力图谱估算法.
阻力图谱估算法因其快捷、较准确以及简单经济的优点而被广泛使用,大多数小型渔船阻力估算都采用此方法.我国对船舶阻力图谱研究较少,目前主要参考日本有效功率估算图谱[5-6],但该图谱不适用于当今的钢制渔船,因此有必要对钢制渔船船型进行研究,开发相应的阻力图谱,为解决工程实际问题提供技术支撑.本文将66 m远洋鱿鱼钓船作为母型船,建立母型船三维模型及其系列派生船型,运用Star-CCM+软件对其系列船型进行数值模拟,得到相应的阻力数据,将阻力结果换算为15 ℃海水下实船阻力及对应有效功率系数,绘制远洋鱿鱼钓船阻力图谱,并将其应用于船型设计.
1 船舶建模
1.1 研究内容
将66 m远洋鱿鱼钓船作为母型船,完成阻力图谱的绘制工作;运用Star-CCM+软件数值模拟船模周围的流场,对不同Fr下的船舶阻力进行数值计算;通过变换排水体积长度比、宽度吃水比以及棱形系数建立系列模型,对已建立的全部系列模型进行模拟计算,完成相应阻力图谱绘制.具体技术路径如图1所示.
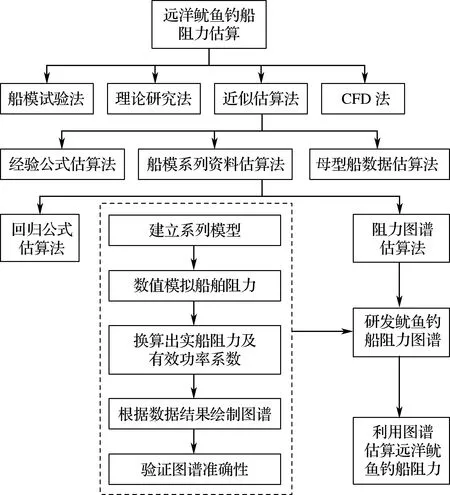
图1 技术路径
文中部分变量如下:Loa,总长,m;Lpp,垂线间长,m;B,型宽,m;D,型深,m;d,吃水,m;d1,结构吃水,m;Luw,船舶浸没总长度,m;∇,排水体积,m3;Δ,排水量,t;Cp,棱形系数;Cb,方形系数;Cw,水线面系数;X,排水体积长度比;Y,宽度吃水比;Lpp/B,长宽比;Dt,试验阻力,N;Df,模拟阻力,N;Fr,弗劳德数;E,相对误差;vs,实船速度;vm,模型速度.
1.2 船舶曲面建模
选取66 m远洋鱿鱼钓船作为母型船,该船已完成拖曳试验,具有完整的阻力试验数据.母型船主尺度见表1.
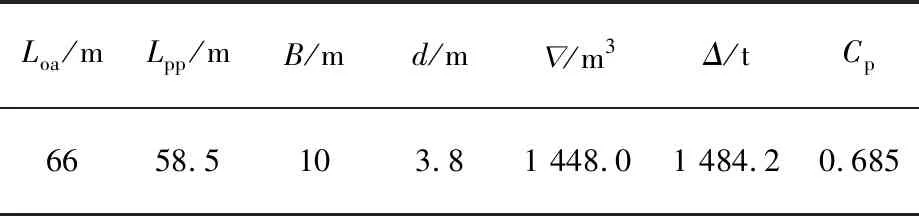
表1 母型船主尺度
目前船舶曲面建模方法已经发展得较为成熟[7-8],本文首先对母型船进行三维船舶曲面建模和船舶型线表达[9-10],将母型船的半宽水线图、横剖线图和纵剖线图(图2)分别导入软件,将其通过放缩命令调整为目标船舶的大小,并按母型船型线图调整控制点的位置,使其与背景型线图中对应位置型线重合,从而得到母型船三维模型,如图3所示.
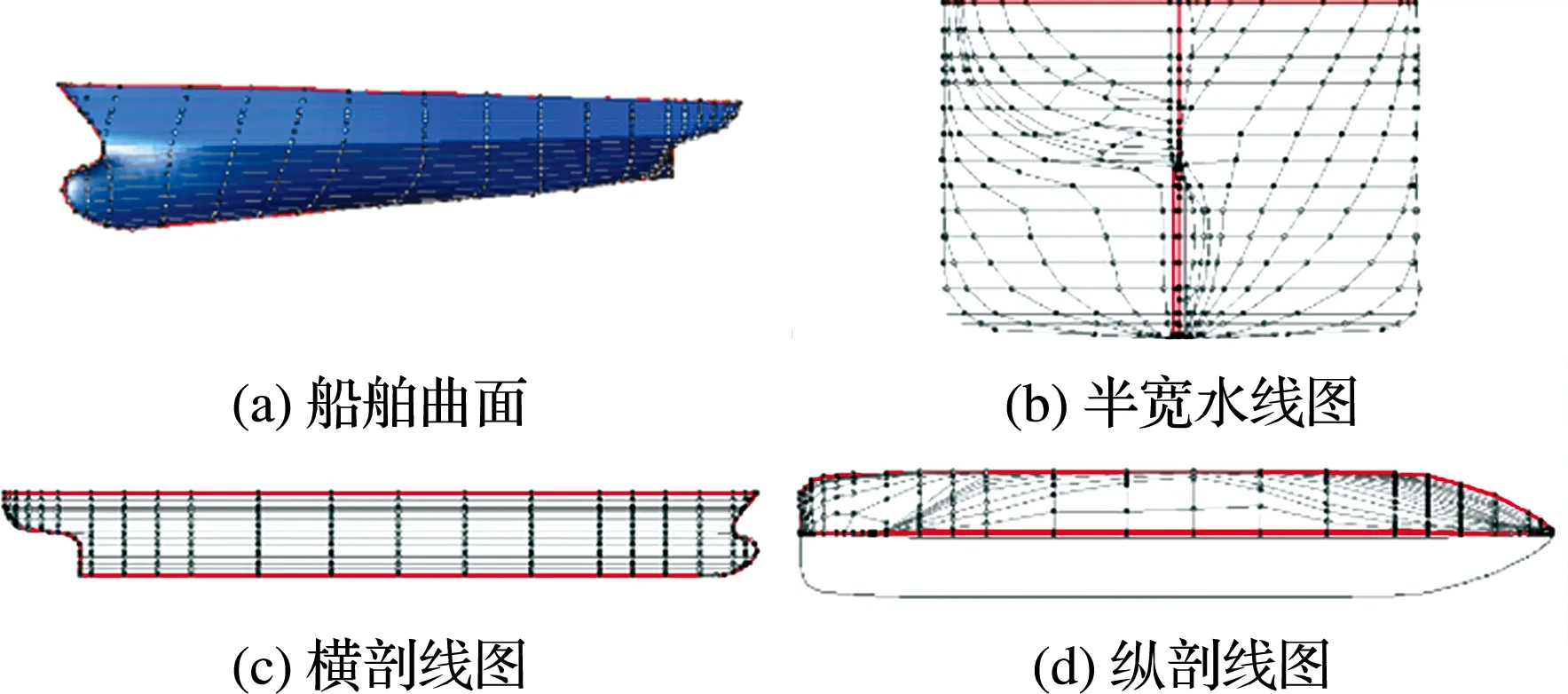
图2 船舶曲面与型线表达
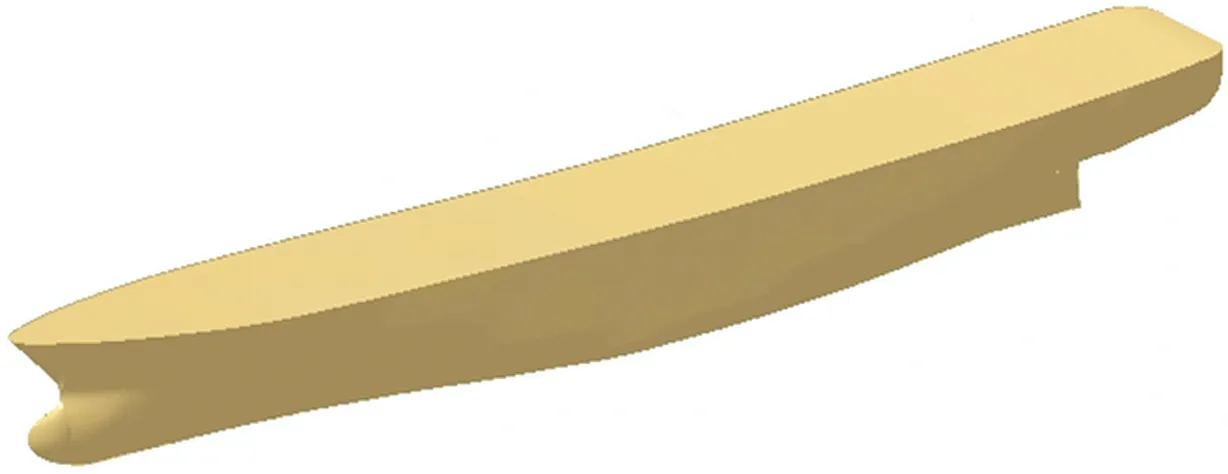
图3 母型船三维模型
1.3 系列船舶网格化确定
本文选取影响船舶阻力最大的船型系数[11-12],即棱形系数Cp、排水体积长度比X和宽度吃水比Y,将这3个参数作为变量建立系列船型,从而开展对船舶阻力的研究.其中排水体积长度比X代表了船舶的瘦长程度,数值大则意味着在同样长度范围内分布更多的排水量,因此表示船舶肥而短,反之则表示船舶瘦而长[13],X表达式为
(1)
宽度吃水比Y表征船舶的扁平程度,表达式为
Y=B/d
(2)
在保证船长、船宽不变的情况下,变换排水体积长度比X、宽度吃水比Y以及棱形系数Cp.将X按5、6、7、8分为4个系列,将Y按3.0和2.2分为2个系列,设置Cp为0.550~0.850,对母型船进行参数变换并建立32个系列模型,具体船舶参数见表2.
2 数值模拟
2.1 CFD法
CFD法通过计算机数值计算和图像显示,对包含流体流动和热传导等相关物理现象的系统进行分析[14-15].
本文选取Star-CCM+软件对系列船舶模型进行数值模拟,针对湍流现象分析,CFD法主要有直接数值模拟(DNS)、大涡模拟(LES)、分离涡模拟(DES)和雷诺时均N-S(RANS)方法,本文采用N-S方法进行求解[16-17].不同湍流模型针对不同流动状态假设,本文研究远洋鱿鱼钓船在静水中的阻力为分离流计算,综合对各种湍流模型的分析和计算考虑,选取Realizablek-ε模型.波形采用VOF方法模拟,通过欧拉多相流设置气液交界面,Star-CCM+软件中的流体域体积多相模型实施属于交界面捕捉方法系列,可预测不混溶相交界面的分布和移动.
2.2 数值模拟方法准确性验证
2.2.1 计算模型 本文基于66 m远洋鱿鱼钓船型线图,建立1∶1三维实船模型,根据拖曳试验中船模采用的缩尺比λ=1∶12进行缩小,使建立的三维模型保持与拖曳试验模型相同的尺寸状态,具体参数见表3.
2.2.2 计算域建立及网格划分 模型船关于中纵剖面对称,考虑数值模拟计算的时间成本,本文采用半船模型进行阻力计算,将半船模拟得到的阻力结果乘以2作为最终的阻力模拟值与拖曳试验结果进行对比,验证数值模拟方法的可靠性和准确性.
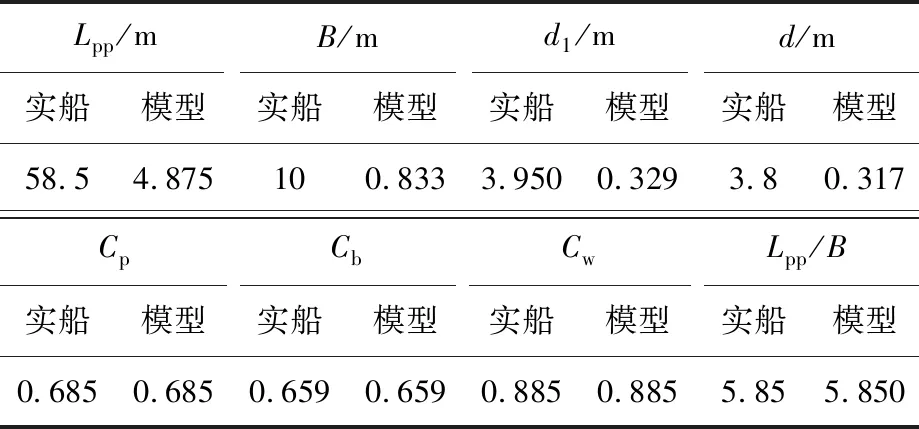
表3 船模参数
建模完成后,进行网格形式的对比计算,即是否采用重叠网格.根据基本设置,基础网格尺寸为1 000.00 mm,最小网格尺寸为31.25 mm,建立重叠网格计算模型,网格总数约为1.42×106.用同样的方式设置无重叠网格计算模型,网格总数约为1.36×106,网格总数相近.其他除重叠网格以外的相关参数设置基本相同,最终计算结果见表4.

表4 不同网格形式的计算结果
由表4可知,在采用重叠网格的情况下,相对误差较小.因此在接下来的网格无关性验证中,采用重叠网格形式进行模拟计算.

该船舶的特点是船首部设有球鼻艏,船中部具有部分平行中体.其网格的具体形式:在最内部设置与船舶相对静止的重叠网格,在球鼻艏部分设置一个局部加密区间,在整个流域内部设置两个整体加密区间,在自由液面部分设置一个加密区间.将整个流体域的来流方向设为速度进口,去流方向设为压力出口,中间对称平面设为对称面,上方、下方及后方同样设为速度进口,为后续的数值模拟计算奠定基础,具体计算域划分及网格设置如图4、5所示.

图4 计算域网格划分和边界条件

图5 船舶表面网格
2.2.3 数值模拟准确性验证 将母型船在结构吃水和设计吃水状态下的拖曳试验结果[18]与数值模拟结果进行对比,结果分别见表5、6.图6、7为拖曳试验现场图片[18],图8为数值模拟中设计吃水状态下自由液面云图.
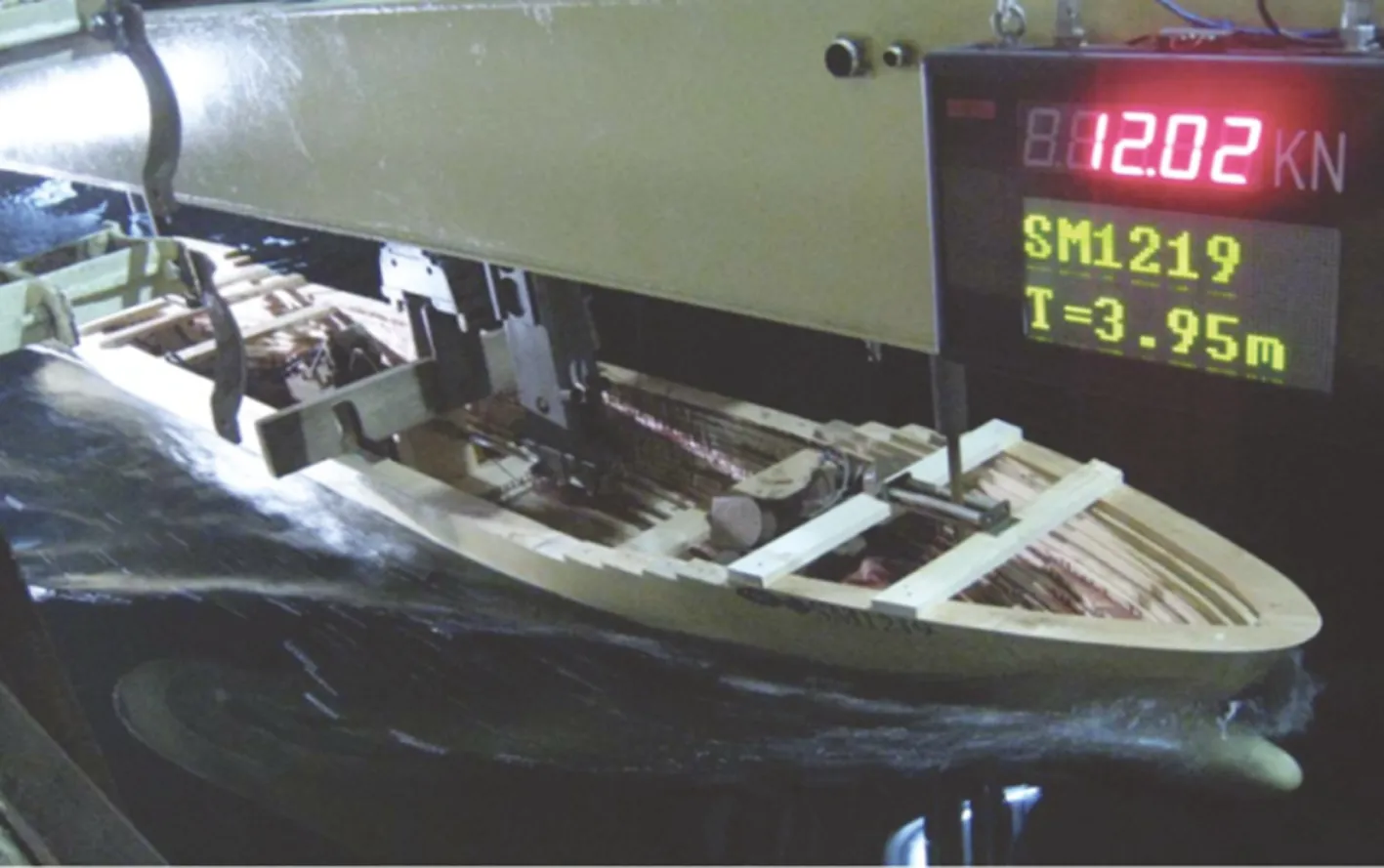
图6 结构吃水状态下拖曳试验
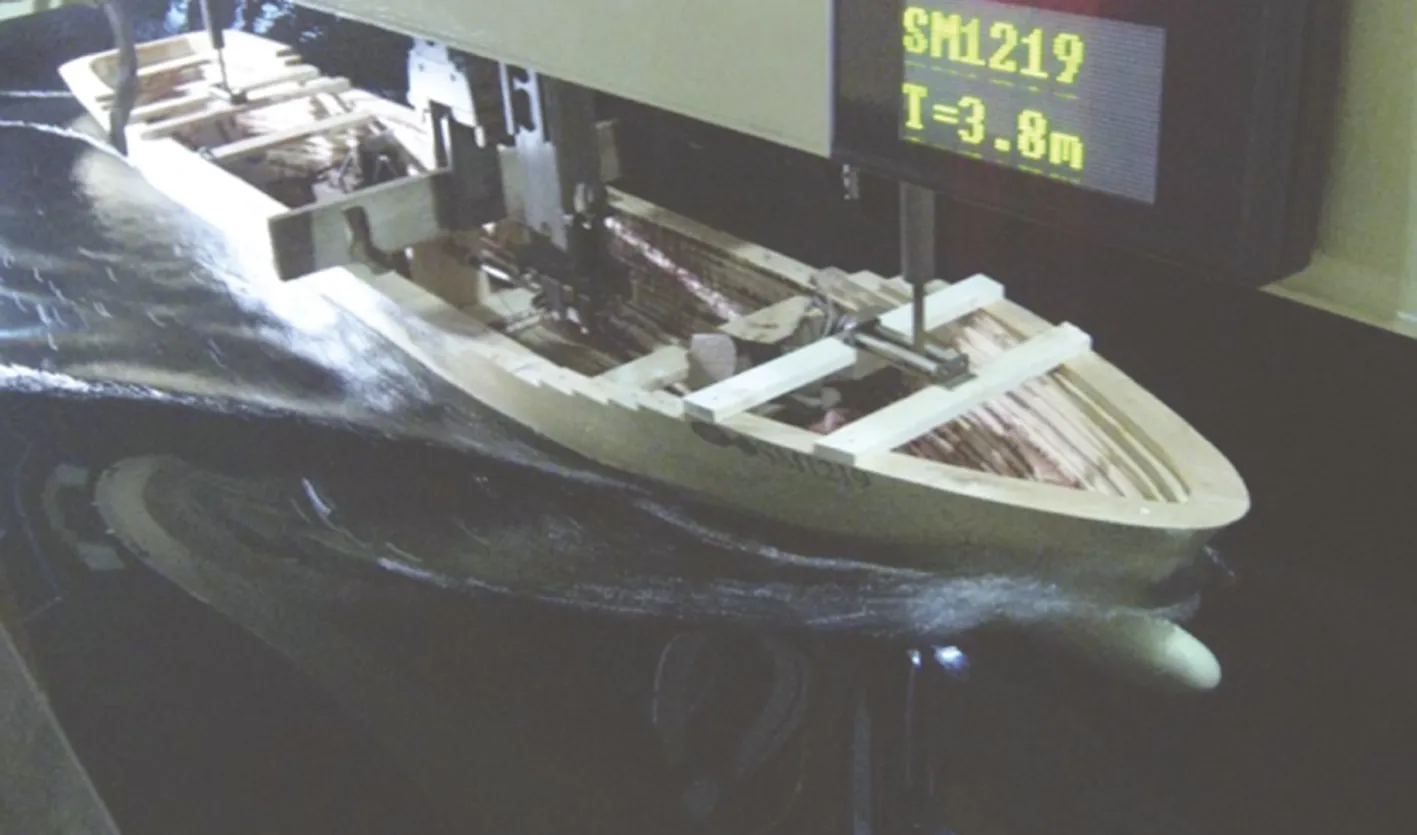
图7 设计吃水状态下拖曳试验
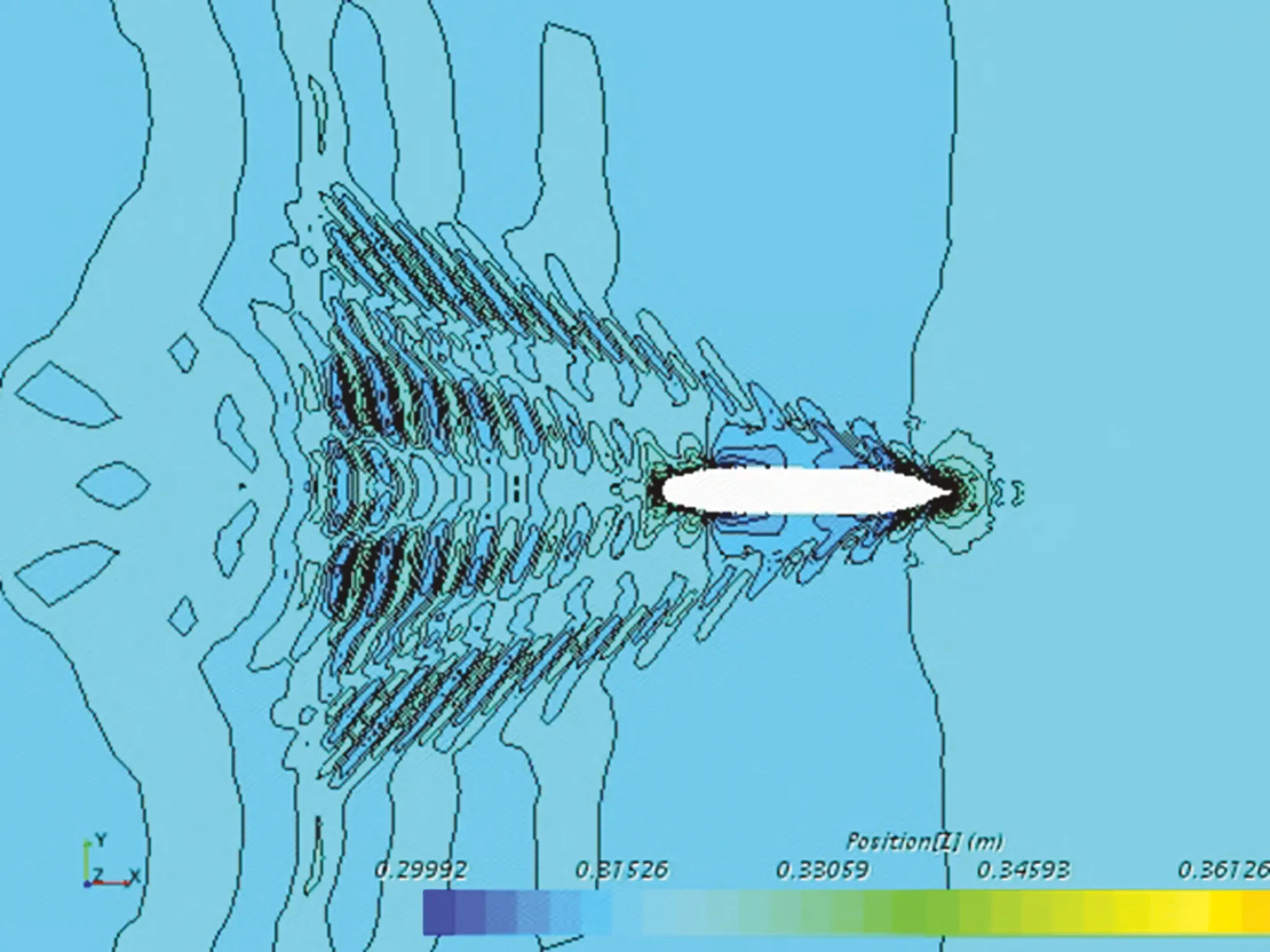
图8 设计吃水状态下自由液面云图
由表5和图9可以看出,在结构吃水状态下,当船舶处于低航速时,数值模拟结果略高于拖曳试验结果;当船舶处于高航速时,数值模拟结果略低于拖曳试验结果,且相对误差上限为2.82%,下限为0.19%,结果非常接近.
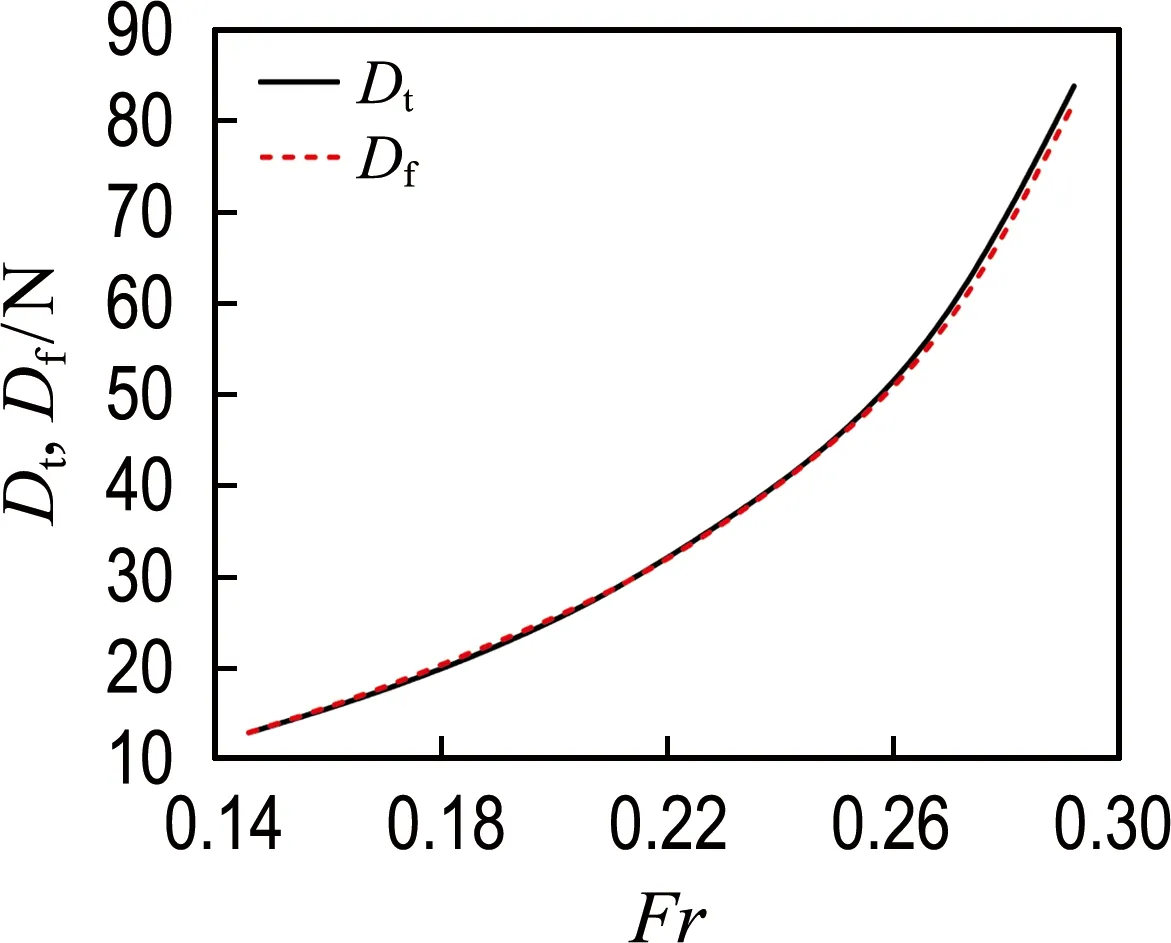
图9 结构吃水状态下拖曳试验与数值模拟结果对比图
由表6和图10可以看出,在设计吃水状态下,当船舶处于低航速时,数值模拟结果略高于拖曳试验结果;当船舶处于高航速时,数值模拟结果略低于拖曳试验结果,与结构吃水状态下的变化趋势相同,且相对误差上限为2.33%,下限为0.09%,精度满足图谱设计要求.
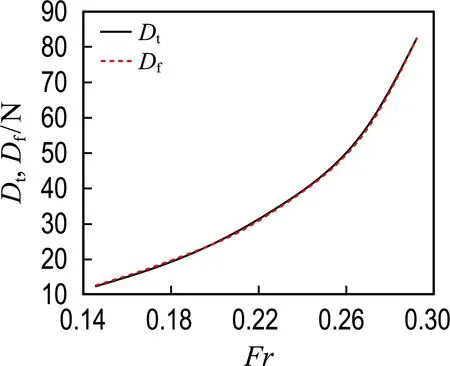
图10 设计吃水状态下拖曳试验与数值模拟结果对比图
通过综合分析表5、6中船舶在两种不同吃水状态下的拖曳试验与数值模拟结果,可以验证数值模拟方法得到的结果是准确的.
2.3 实船阻力换算
对建立的系列模型逐一进行数值模拟计算,在得到半船阻力结果后,根据二因次法[13]将模拟结果换算为实船数据,得出对应状态下10倍有效功率系数,根据该系数绘制最终的有效功率系数图谱.以母型船数据为参考,根据有效功率系数图谱对母型船进行阻力估算,通过结果对比,证明图谱的准确性.
采用二因次法[13]将数值模拟结果换算为15 ℃海水下的实船数据,数据换算过程如下:
设在模型速度vm下计算的模型阻力为Dtm,则模型的总阻力系数Ctm为
(3)
其中Sm为模型总湿表面面积,m2.
根据模型总阻力系数计算剩余阻力系数Cr:
Cr=Ctm-Cfm
(4)
其中Cfm为模型船舶摩擦阻力系数,按照ITTC-1957公式计算,即
(5)
其中Re为雷诺数,按照船舶水线长计算,即
(6)
其中Lwl为船舶水线长,m;ν为水的运动黏性系数.
换算补贴系数ΔCf=0.000 4,则实船在对应速度下的总阻力系数为
Cts=Cr+Cfs+ΔCf
(7)
其中Cfs为实船摩擦阻力系数.
实船的总阻力及有效功率计算如下:
(8)
Pes=Dtsvs
(9)
其中Ss为实船总湿表面面积,m2.
有效功率系数E0计算公式如下[13]:
(10)
以宽度吃水比为3.0,排水体积长度比为5,棱形系数为0.550为例,给出模拟结果及换算后的实船数据,见表7,其中Fm=2Df,为数值模型阻力,Pes为实船有效功率,10E0为实船10倍有效功率系数.
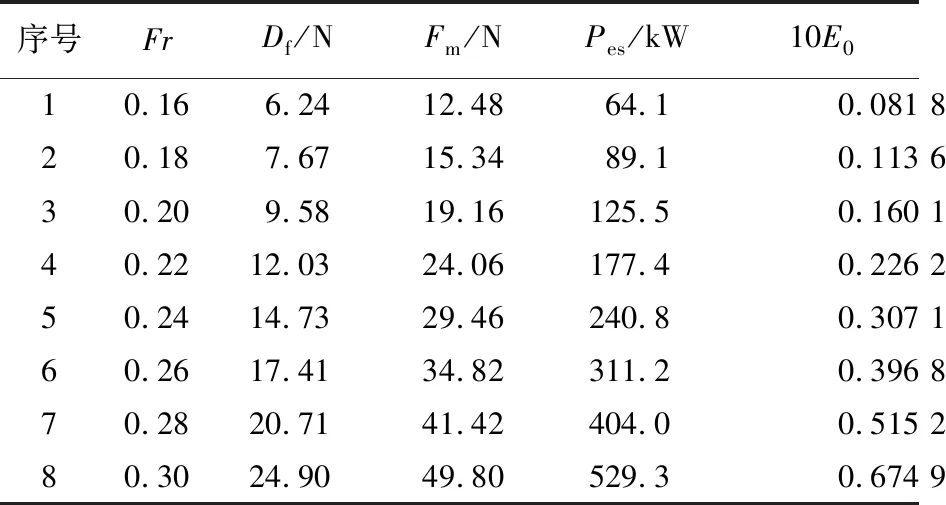
表7 数值模型阻力及实船有效功率系数
3 阻力图谱
3.1 有效功率系数图谱的绘制
有效功率系数图谱绘制时考虑到船舶宽度吃水比与排水体积长度比对船舶阻力影响最大,所以图谱中以宽度吃水比为大系列、排水体积长度比为分系列,绘制了对应状态下的曲线.
根据模拟数据,绘制有效功率系数曲线,如图11~18所示.以每一个Fr为独立单元,横坐标为棱形系数Cp,纵坐标为10倍有效功率系数10E0.
图11 有效功率系数曲线(Fr=0.16)
图12 有效功率系数曲线(Fr=0.18)
图13 有效功率系数曲线(Fr=0.20)
图14 有效功率系数曲线(Fr=0.22)
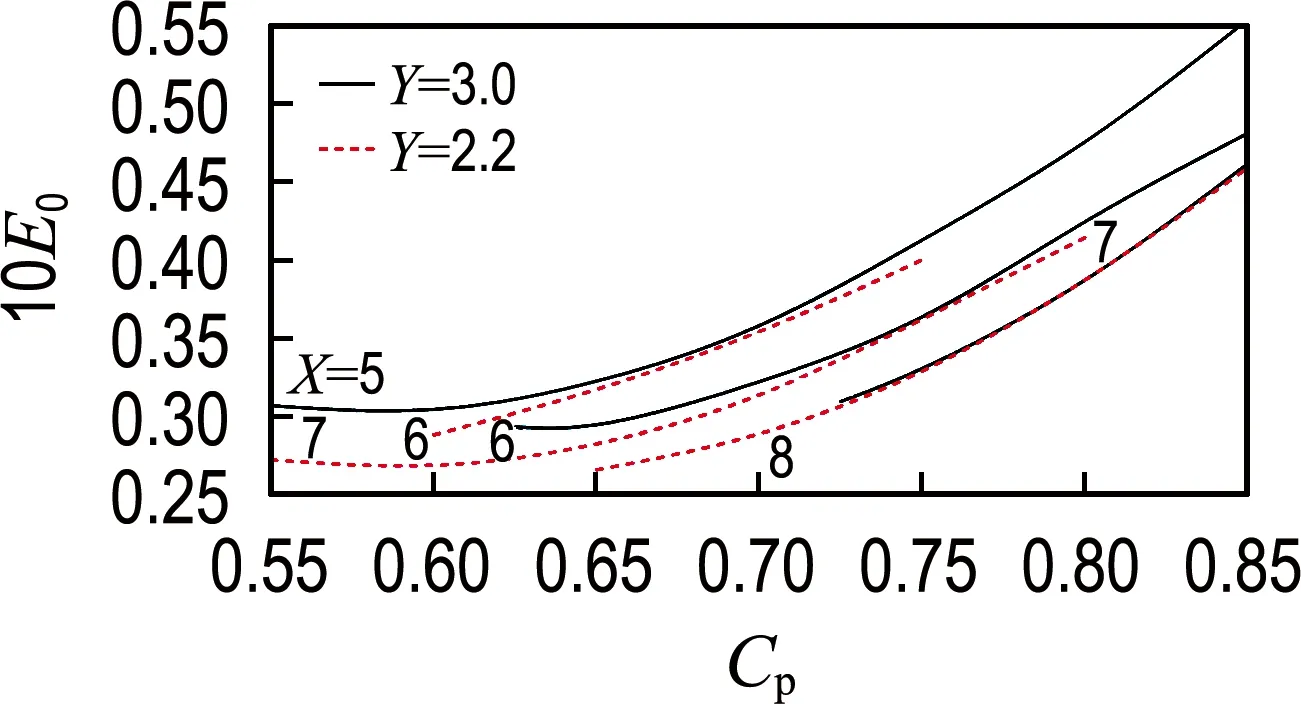
图15 有效功率系数曲线(Fr=0.24)
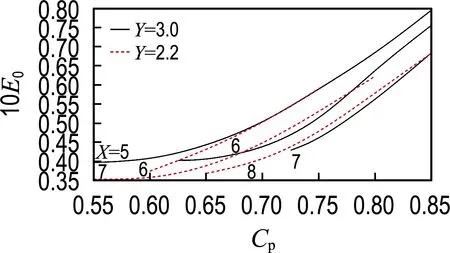
图16 有效功率系数曲线(Fr=0.26)
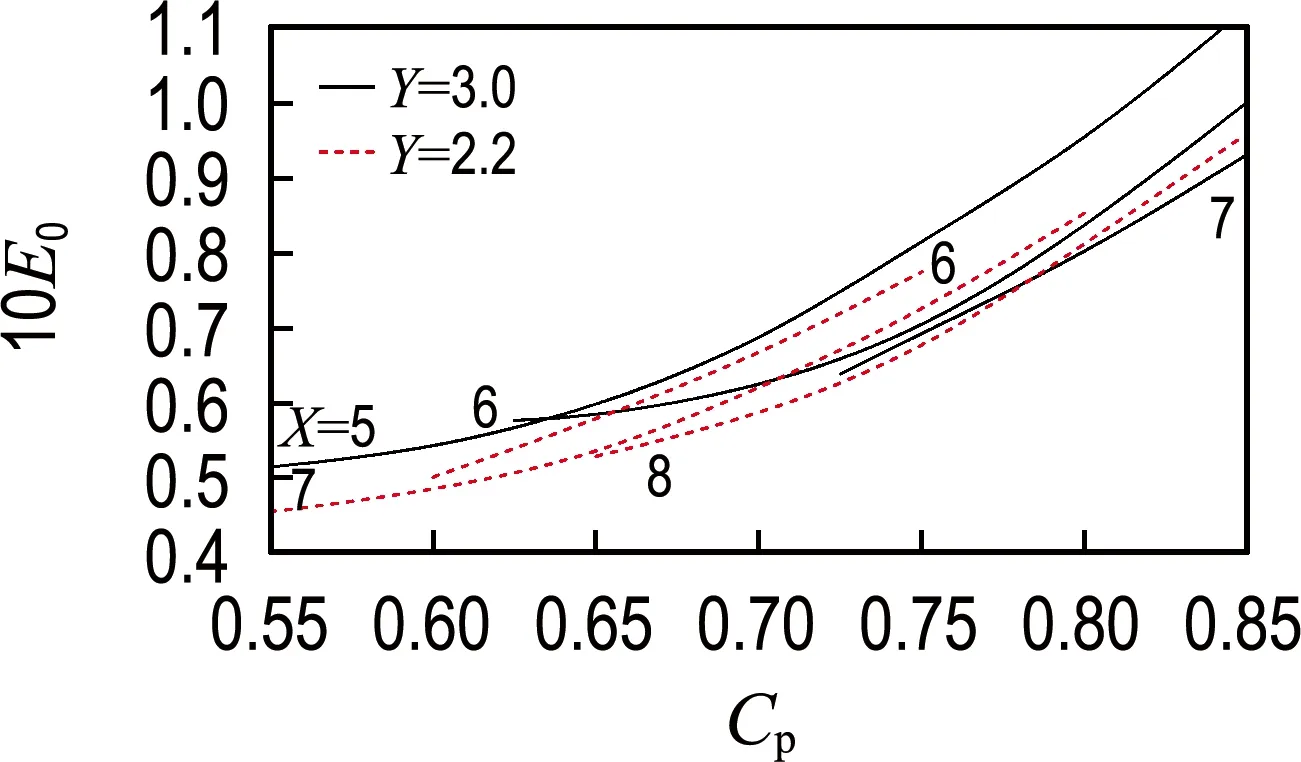
图17 有效功率系数曲线(Fr=0.28)
除此之外,本文还绘制了不同排水体积长度比和Fr下有效功率系数变化曲线(图19~34).
不同排水体积长度比下有效功率系数变化曲线分为两种:第一种是以每一个Fr为独立单元, 如图19~26所示;第二种是以每一个棱形系数为独立单元,如图27、28所示.

图19 不同排水体积长度比下有效功率系数变化曲线(Fr=0.16)
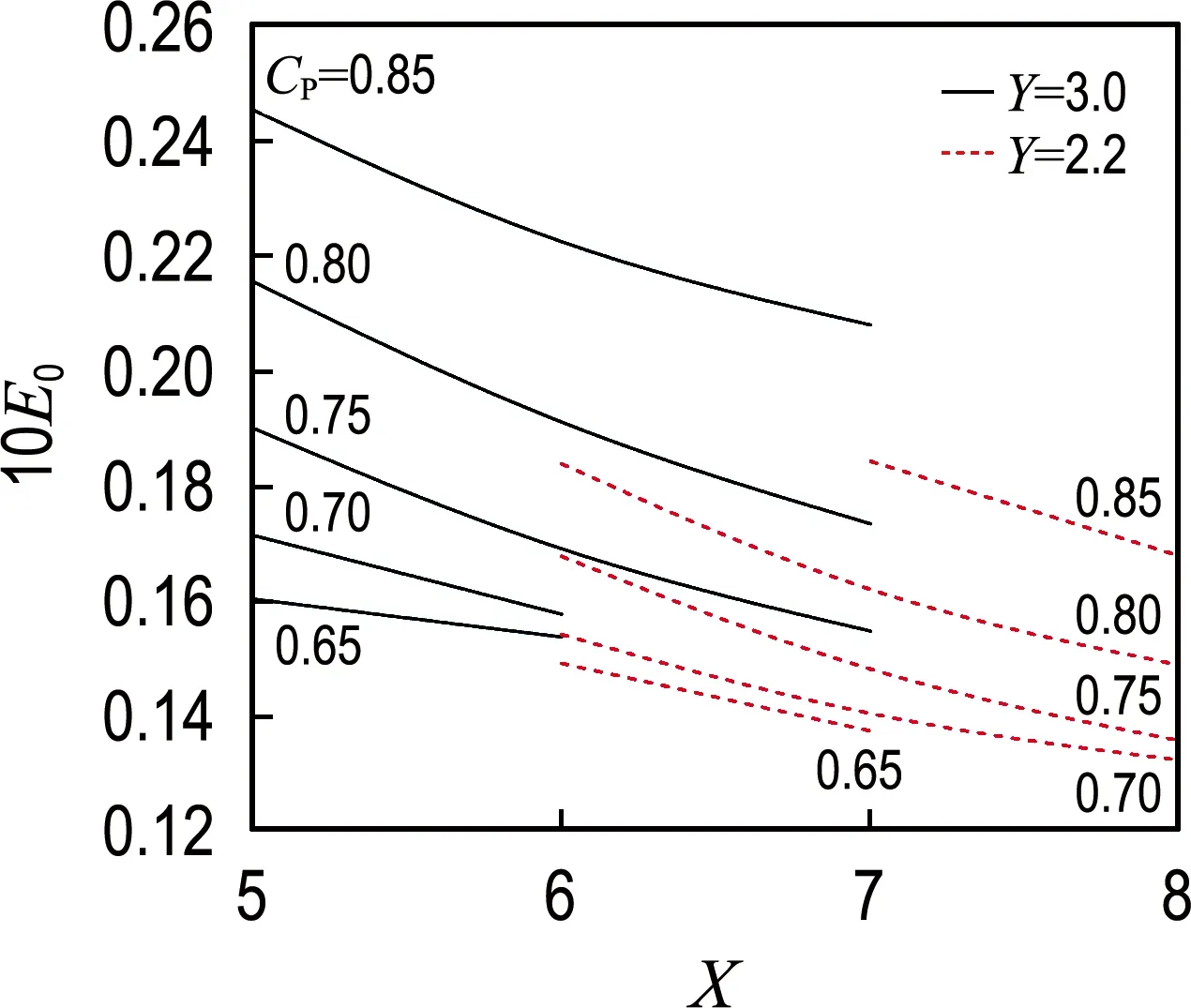
图21 不同排水体积长度比下有效功率系数变化曲线(Fr=0.20)
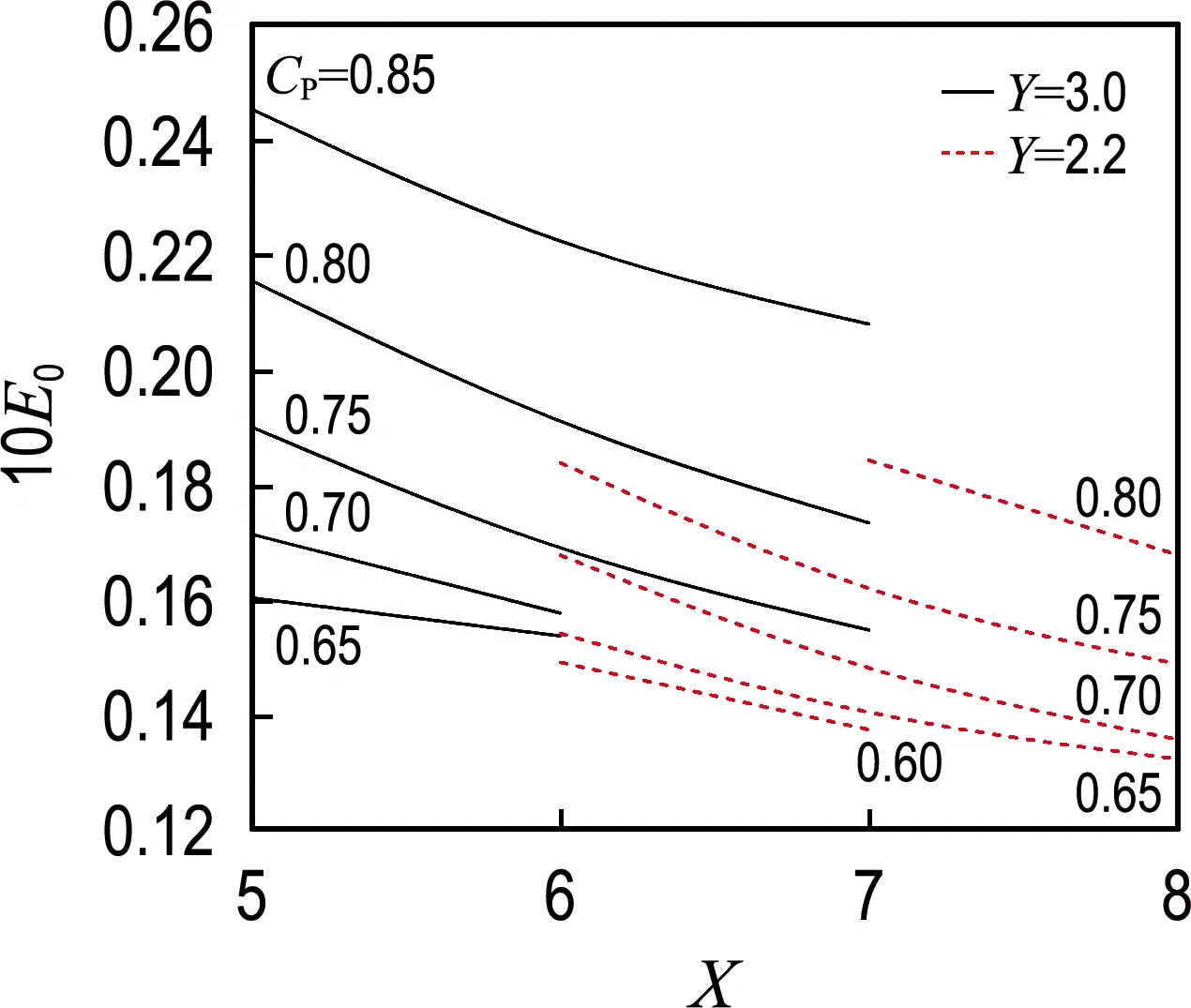
图22 不同排水体积长度比下有效功率系数变化曲线(Fr=0.22)

图23 不同排水体积长度比下有效功率系数变化曲线(Fr=0.24)
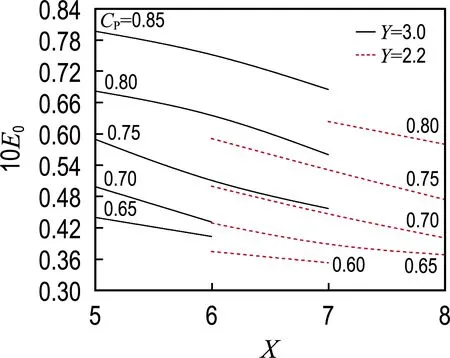
图24 不同排水体积长度比下有效功率系数变化曲线(Fr=0.26)
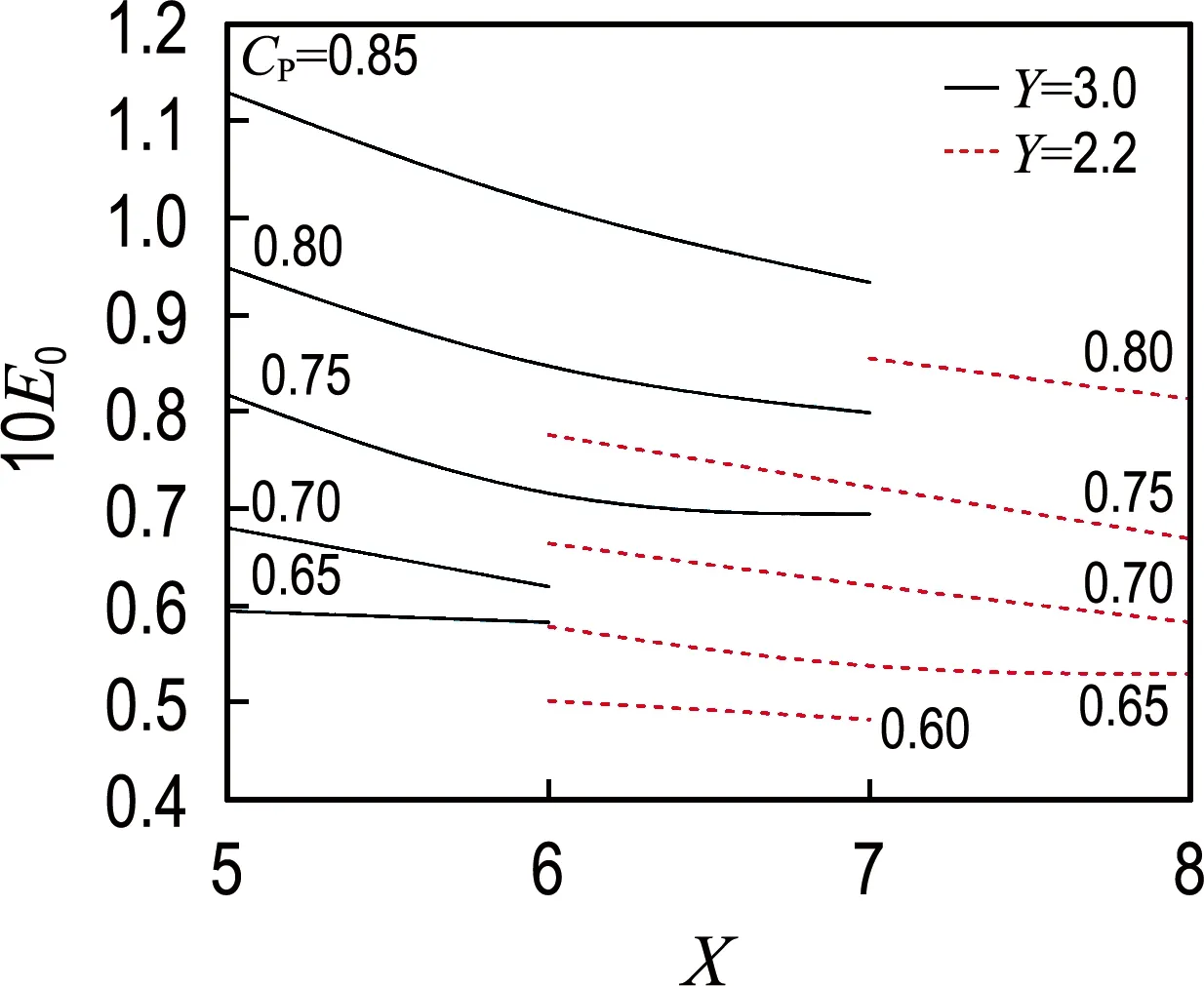
图25 不同排水体积长度比下有效功率系数变化曲线(Fr=0.28)

图26 不同排水体积长度比下有效功率系数变化曲线(Fr=0.30)

图27 不同排水体积长度比下有效功率系数变化曲线(Cp=0.60、0.65、0.70)
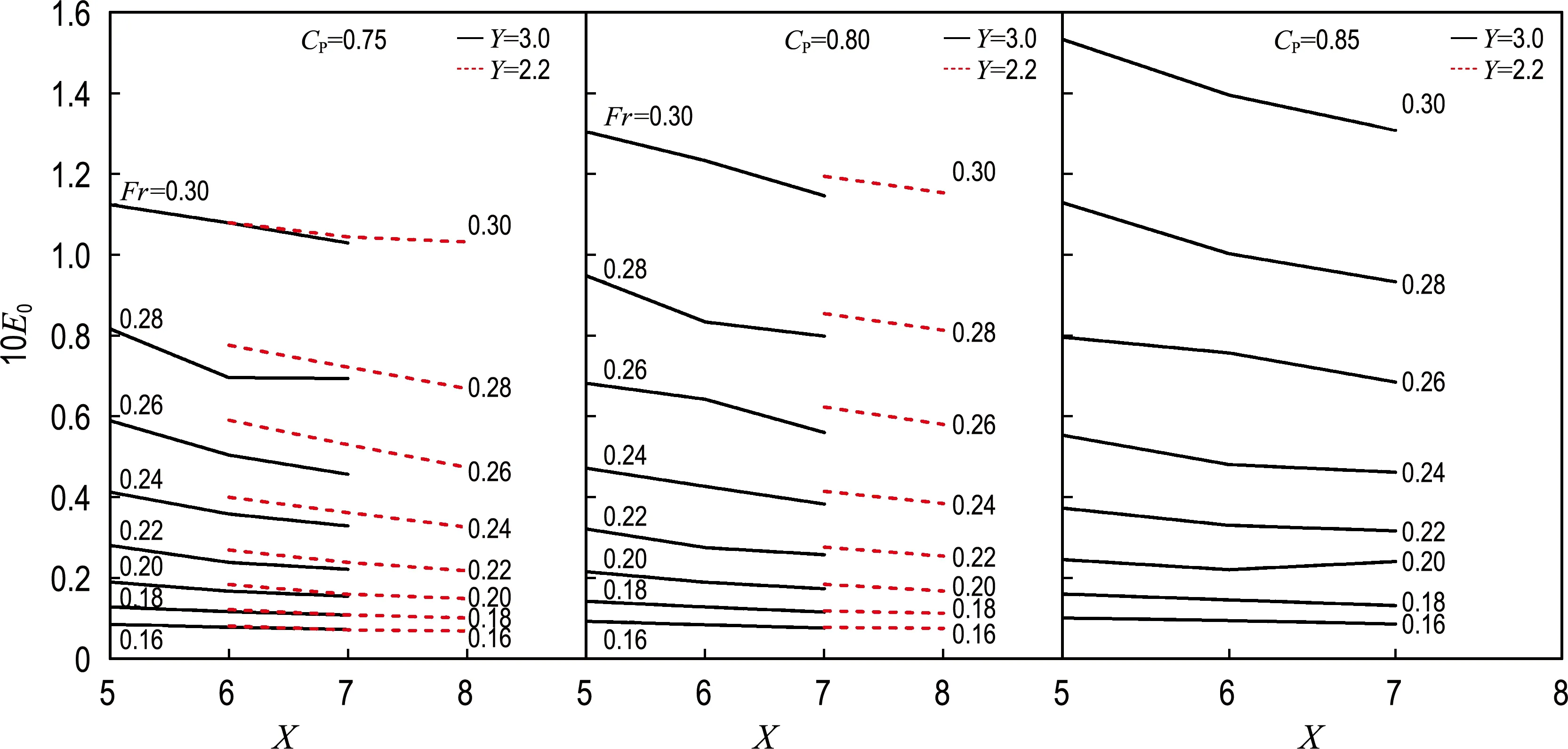
图28 不同排水体积长度比下有效功率系数变化曲线(Cp=0.75、0.80、0.85)
不同Fr下有效功率系数变化曲线也分为两种:第一种是以每一个排水体积长度比为独立单元,如图29~32所示;第二种是以每一个棱形系数为独立单元,如图33、34所示.
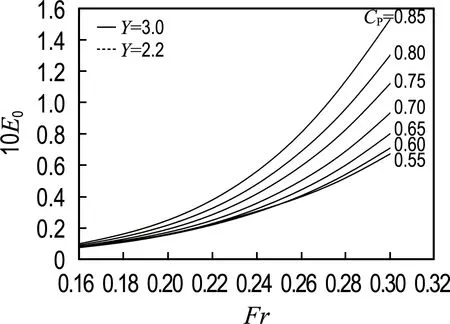
图29 不同Fr下有效功率系数变化曲线(X=5)

图30 不同Fr下有效功率系数变化曲线(X=6)
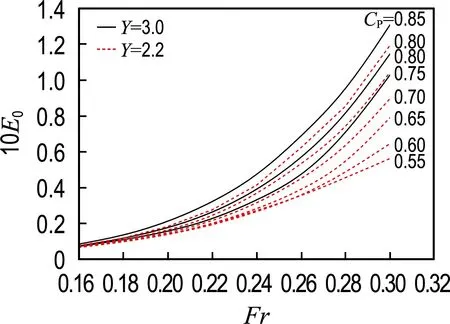
图31 不同Fr下有效功率系数变化曲线(X=7)
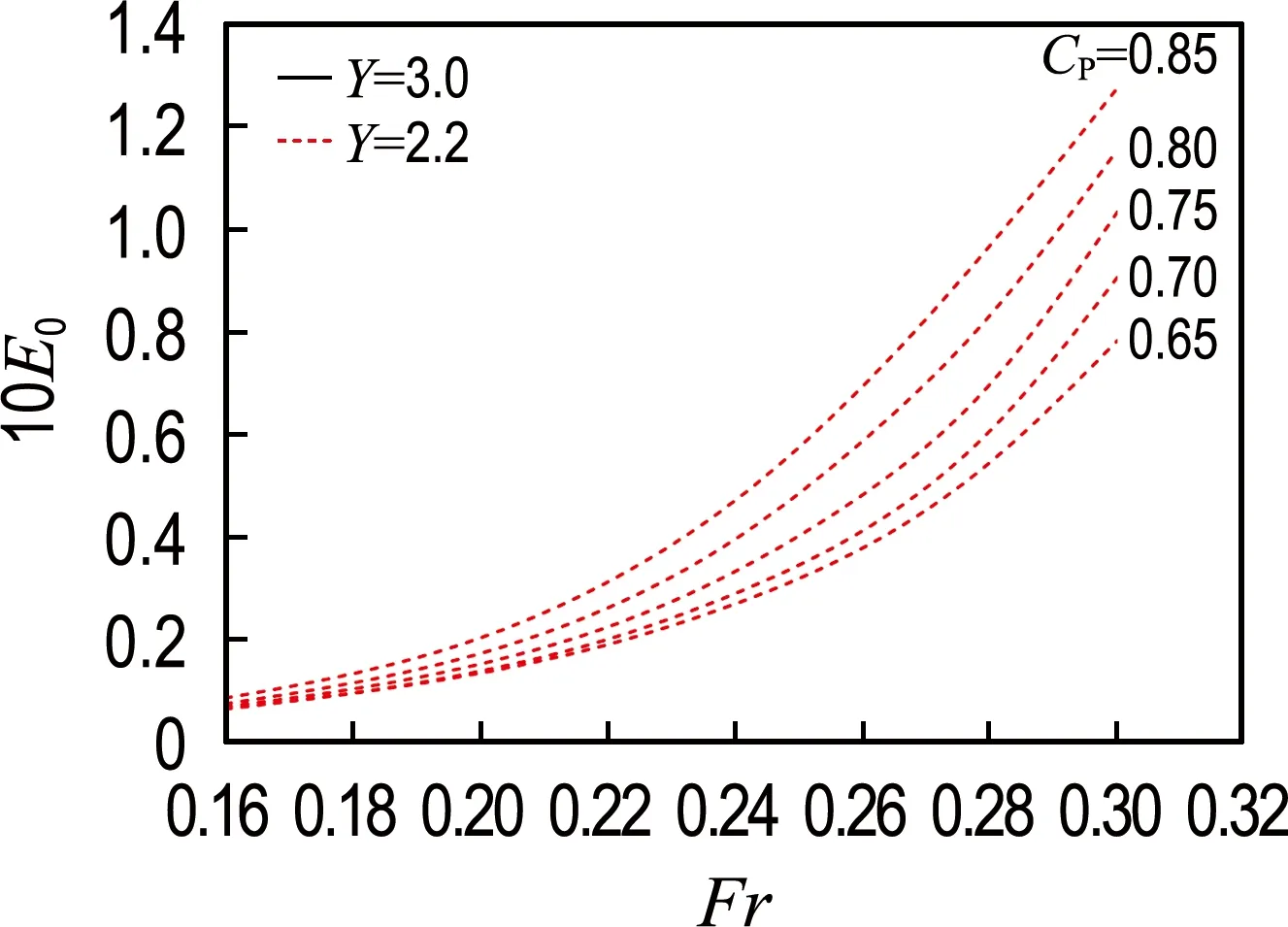
图32 不同Fr下有效功率系数变化曲线(X=8)
该系列阻力图谱对远洋鱿鱼钓船的适用范围如下:
0.55≤Cp≤0.85;0.16≤Fr≤0.30
2.2≤Y≤3.0; 5≤X≤8
Fig.24 Variation curves of effective power coefficient under different drainage volume to length ratios (Fr=0.26)
通过这一系列阻力图谱,可以快速估算已知基本船舶参数且总长在66 m左右的远洋鱿鱼钓船的阻力,除此之外,在船舶设计过程中,船舶优化设计也是非常重要的一项工作[12,19-21].基于以上系列阻力图谱可以对远洋鱿鱼钓船的主尺度以及各参数进行优化,为船舶设计提供便利.
3.2 基于图谱估算实船阻力
在已知船舶排水量、垂线间长、排水体积长度比、宽度吃水比以及棱形系数下可使用该图谱.
以66 m远洋鱿鱼钓船作为母型船,运用图谱估算其阻力,验证图谱的准确性.根据当前资料,取母型船航速为8~14 kn,变换步长为1 kn,对应的Fr见表5.现以航速8 kn为例介绍插值过程,其他航速状态阻力估算方法与之相似.
由表5可得,当航速为8 kn时,其Fr为0.167,在有效功率系数图谱中寻找发现介于Fr为0.16和0.18两个图谱之间,因此读取这两个图谱的10E0后,根据Fr的线性关系进行插值得到最终的10E0.具体步骤如下:
(1)根据Fr为0.16的图谱,由表1可得,母型船棱形系数为0.685,则在图11横坐标为0.685的位置做一条垂线,先看该垂线与Y为3.0的系列曲线X为6和7曲线(需要沿切线方向做延长线)的交点,过交点做水平线与纵坐标10E0相交,读取此时数据均为0.075 3,如图35所示.
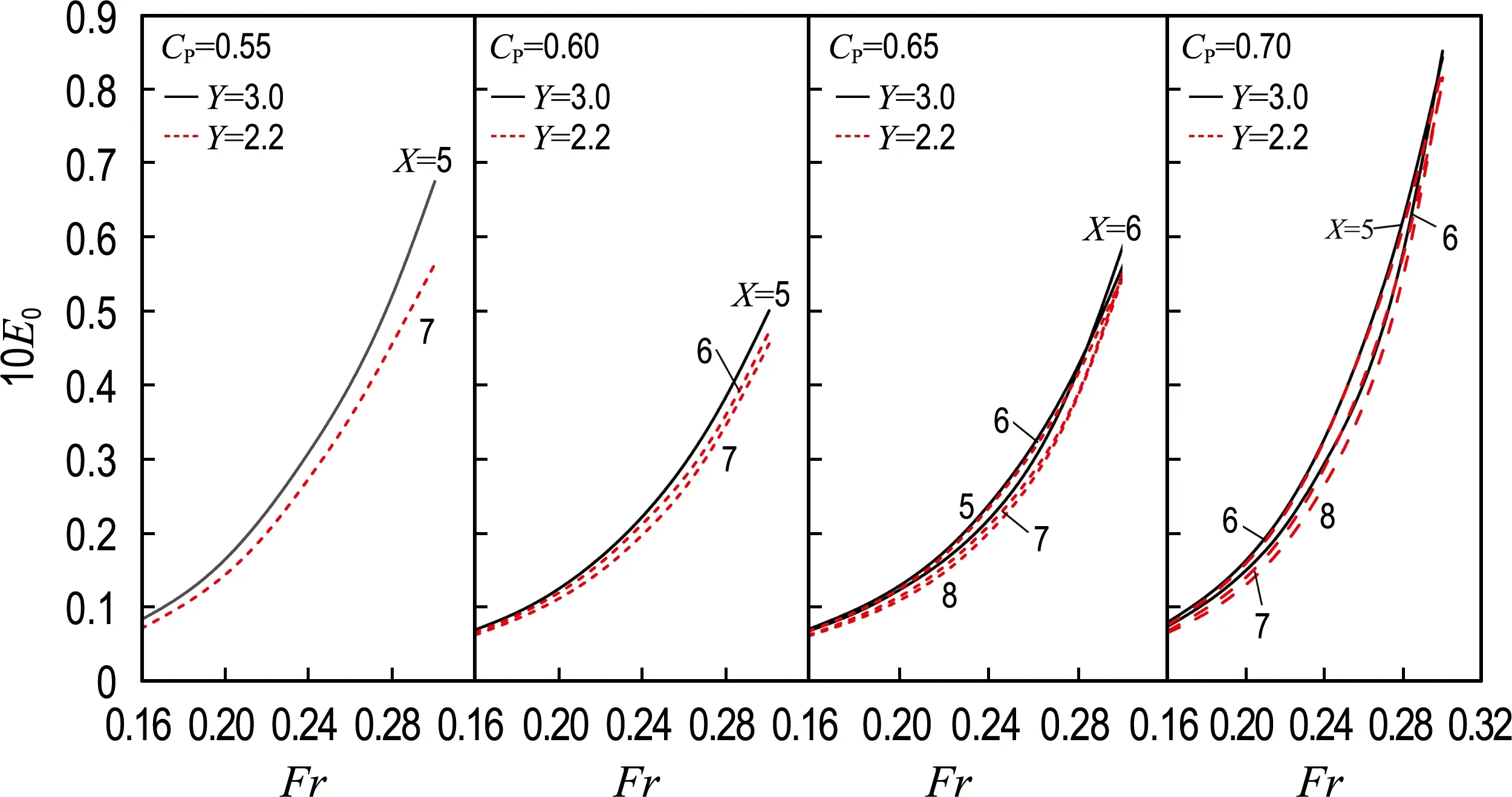
图33 不同Fr下有效功率系数变化曲线(Cp=0.55、0.60、0.65、0.70)

图34 不同Fr下有效功率系数变化曲线(Cp=0.75、0.80、0.85)
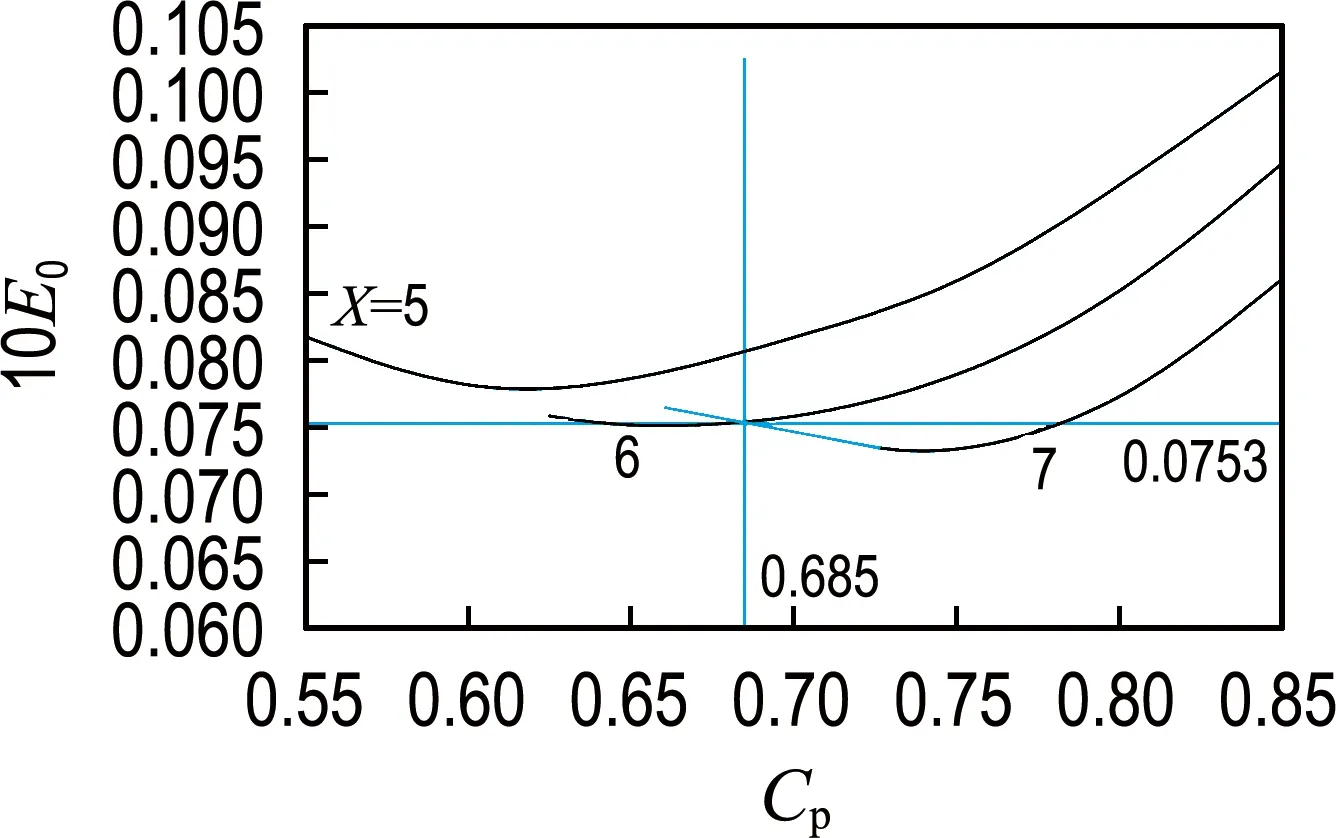
图35 辅助线及其数据(Y=3.0)
根据X为6、7及7.236的线性关系,插值得出X为7.236时的10E0为0.075 3.
过Cp为0.685的垂线与Y为2.2的系列曲线X为7和8曲线的交点做水平线与纵坐标10E0相交,读取此时数据分别为0.070 2和0.068 1,如图36所示.根据X为7、8及7.236的线性关系,插值得出X为7.236时的10E0为0.069 7.
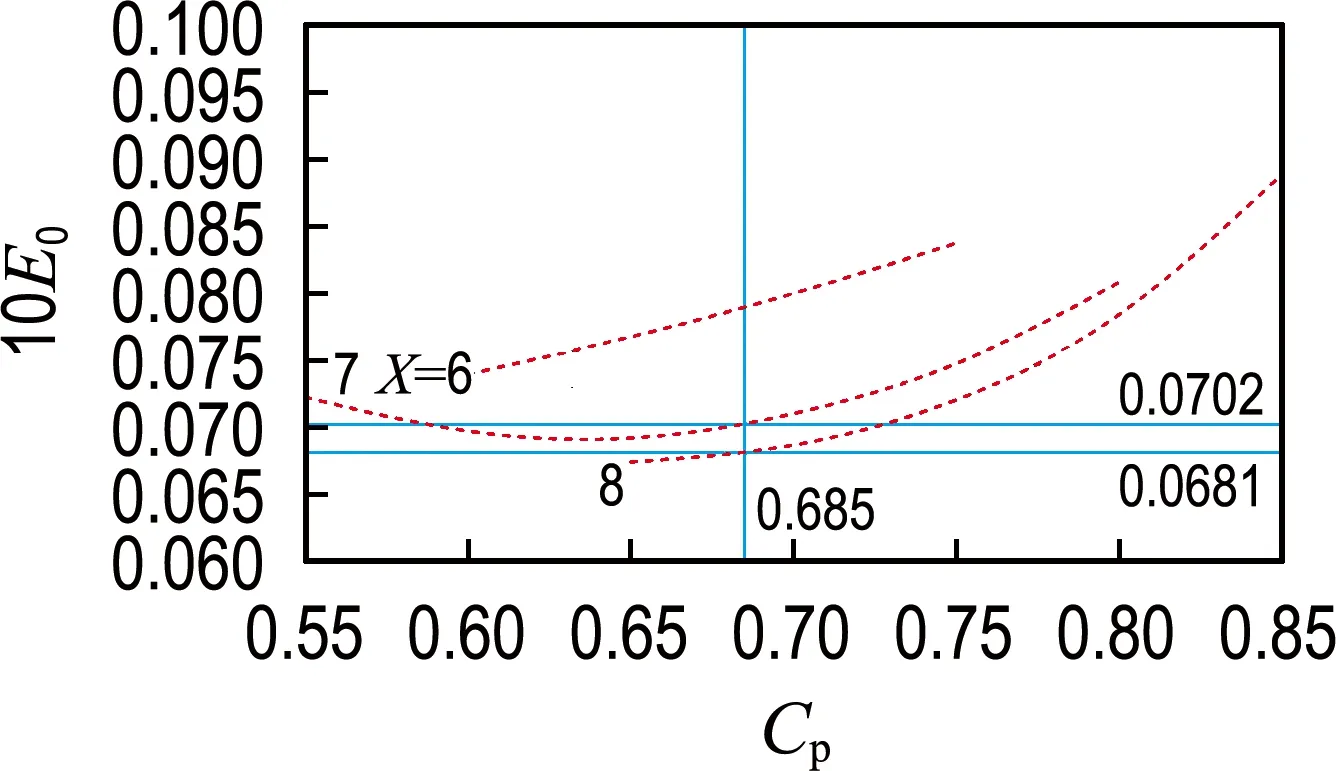
图36 辅助线及其数据(Y=2.2)
(2)母型船Y为2.632,将两条系列曲线分别插值得到X为7.236的10E0为0.075 3和0.069 7,再次根据Y为3.0、2.632及2.2进行线性插值,得到Fr为0.16状态下的10E0为0.073 2,同理,得到Fr为0.18状态下的10E0为0.103 7.
(3)根据Fr为0.16、0.167及0.18的线性关系,进行最后一次插值,最终得到8 kn航速下的10E0为0.082,根据式(11)可计算出此时对应的船舶有效功率Pes:
(11)
(4)以此类推,求得全部10E0,计算后可得到对应航速下实船有效功率Pest.
由表8可得,利用阻力图谱对母型船阻力的估算值与拖曳试验阻力值进行对比,误差均在5%以内.由此可得,图谱在用于远洋鱿鱼钓船阻力估算中,其结果准确,可用于指导实际生产.

表8 阻力计算结果对比
4 结 论
(1)对母型船的三维模型建立过程给出详细步骤,阐述了对母型船快速生成系列模型的方法,并建立了研究所需要的远洋鱿鱼钓船系列模型.
(2)选取影响船舶阻力最大的船舶系数,即棱形系数Cp、排水体积长度比X和宽度吃水比Y,将这3个参数作为变量建立系列船舶,从而开展对船舶阻力的研究.根据宽度吃水比,将模型分成Y为3.0和2.2的两大系列,其中Y为3.0时,细化了X为5、6和7的分系列;Y为2.2时,细化了X为6、7和8的分系列.共建立32个系列模型,作为模拟工作的研究对象.
(3)对Star-CCM+方法进行有效性验证.对母型船进行模拟计算,经过与拖曳试验数据对比发现,在结构吃水与设计吃水状态下,相对误差上限为2.82%,相对误差下限为0.09%,进一步验证了方法的有效性.
(4)根据最终确定的模拟方法,对已建立的全部系列模型进行模拟计算,每个模型对应8个算例,以Fr为变量,取值为0.16~0.30,变换步长为0.02.将全部模拟结果根据二因次法进行换算,得出实船15 ℃海水状态下阻力及对应有效功率系数.根据32组有效功率系数绘制阻力图谱,以每一个Fr为独立单元,横坐标为棱形系数,纵坐标为10倍有效功率系数.除此之外,还根据计算结果绘制了不同排水体积长度比下有效功率系数变化曲线.在得到图谱后,利用母型船数据作为实例,对图谱的使用方法进行介绍,根据图谱得到的估算阻力与拖曳试验数据进行对比,验证了图谱在远洋鱿鱼钓船阻力估算上的准确性.