矿井下可视化监控与人员定位融合应用研究
2023-11-29孔国财
孔国财
国家能源集团宁夏煤业有限责任公司灵新煤矿 宁夏灵武 750411
煤炭作为传统能源的代表,在今后的很长一段时间里仍然是主要能源,煤矿行业的安全生产影响着国家煤炭能源供应的安全性和稳定性[1-2]。20世纪 90 年代,视频监控系统开始被集成进矿用监控系统中并引起广大学者的研究[3]。瓦斯爆炸、矿井塌方等灾难性安全事故严重威胁着井下人员的生命安全。当发生矿难时,施救人员需对矿工进行精准定位并展开营救。当前井下定位技术种类较多,如无线局域网 (WiFi)、超声波、蓝牙、超宽带 (UWB) 等[4-6]。其中 WiFi 技术无法完成精准定位;超声波定位技术可达到厘米级,但其定位易受多径效应影响;而蓝牙定位技术主要用于室内。相比于传统的定位系统,UWB 技术具有高穿透力、低功耗、抗干扰性强、定位精度高等优点,是最有潜力的关键定位技术之一。然而,煤矿井下环境是受限空间,存在强多径效应,在存在大型设施设备的环境中,电磁波传输受到的影响显著。因此,为了实现高精度定位,需要在单一无线定位方式,拓展研究融合定位技术与方法。基于视频监控的图像采集和目标检测,能够在确定目标位置范围的基础上,进一步提升定位精度,同时能够实现人员行为等的动态识别。
为实现井下视频的大带宽、低时延的实时监控,满足对井下工作人员的行为进行动态识别和定位的需求,笔者针对性地提出和研究了以 5G 通信技术为基础的可视化监控系统融合 UWB 定位的技术方案。
1 可视化监控与人员定位融合系统
可视化监控与人员定位融合系统架构如图1 所示。该系统由视频监控系统和人员定位系统 2 部分组成,分为井上、井下部分。井上部分为系统监控与定位融合平台,实现可视化视频监控与定位信息数据融合处理;井下部分由可视化智能监控设备与人员定位设备组成,通过 5G 网络完成数据传输。5G 通信网络具有大带宽、广连接、低时延的特点[7-8],在融合系统中,通过切片技术,为视频监控信息与人员定位信息的传输交互,提供了更低的时延与更大的带宽。
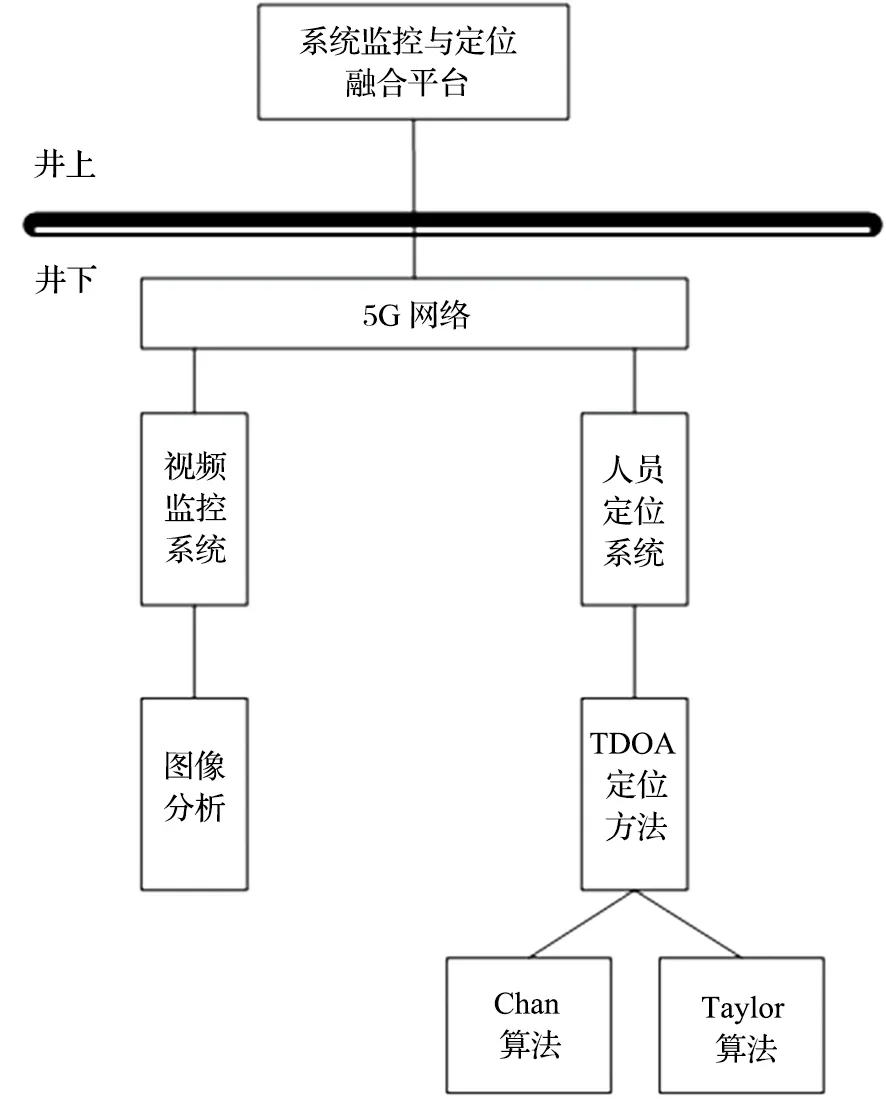
图1 可视化监控与人员定位融合系统架构Fig.1 Framework of visual monitoring and personnel positioning fusion system
2 基于 UWB 的人员定位
人员定位系统采用 UWB 超宽带窄脉冲信号进行测距定位。在系统中,定位标签与定位基站之间的数据信息传输使用双向 2.4G Hz 信号通信。定位标签具备防水防尘功能,可更好适应矿工井下工作环境。UWB 具有较强的信号抗干扰能力,不易受位置的干扰,定位标签的固定方式可根据实际应用进行人员不同位置的佩戴或固定。
2.1 基于 UWB 的无线定位方法
UWB 的定位方法解决方案中常见的有 TOA(Time of Arrive)、TDOA (Time Difference of Arrive) 和AOA (Angle of Arrive) 定位方法[9]。
基于 UWB 的定位方法解决方案中,AOA 定位方法原理简单,但在遮挡环境中的定位误差明显偏大。基于测距的 UWB 方法中,IEEE 802.11.4z 为最新的 UWB 定位协议,其中规定了 3 种基于 TOA 的测距方法,分别为单程 TOA 测距、对称双程的 TOA测距以及非对称双程的 TOA 测距 (双程 TOA 测距又称为 TOF,Time of Flight),TOF 方法需要读卡器与定位卡双方提前预配置参数。在实际部署中,对于读卡器和识别卡的双侧需要进行协议适配,存在一定的不便。因此,笔者研究目标是采用 TOA 和 TDOA 的定位方法,利用 UWB 信号的抗干扰性,实现系统的高精度定位。TDOA 定位方法是利用时间差值进行定位解算,能够减少环境因素引起的测量误差。TDOA定位要求定位基站之间时钟同步,与 TOA 要求的定位标签以及定位基站需要时钟严格同步的算法相比更容易实现,同时可以避免 TOF 方法的预配置协议对接过程。标签要完成定位只需要发送一次 UWB 定位信号,然后从基站将标签发送的时间戳以及从基站接收的时间戳信息通过 UWB 信号发送到主基站,从而可以实现多个待定位标签的实时定位。
从系统的实时性、准确性以及低功耗性等多方面进行考虑,笔者选择 TDOA 定位方法来实现运动场待定位标签位置的估计。
2.2 位置解算算法
常见的算法有 Taylor 算法融合最小二乘法、Chan 算法。Taylor 算法是利用初始估计位置来进行递归的算法。每进行一次递归运算,都可以通过局部最小二乘法得到改进后的估算位置,直到位置的误差小于设定的阈值,停止递归过程,最终通过求解线性方程组获得定位标签所处位置的坐标。
假设矿工所带臂带标签的位置为 (x,y),并且运动场上共有 6 个定位基站,基站坐标为 (xi,yi),(i=0,1,2,…,5),则臂带标签和定位基站之间的距离Ri可以表示为
根据 TDOA 定位算法,从基站与臂带标签的距离和主基站与臂带标签的距离之差Ri0可以表示为
由式 (2) 可以构造以下函数
将fi(x,y,xi,yi),(x′,y′) 处展开,同时忽略二阶以上的分量,可以表示为
用矩阵形式可以表示为
式中:ξ为误差矢量,表示真实位置和估计位置之差。
式(5) 的加权最小二乘解可以表示为
式中:Q为测量值的协方差矩阵。令x″=x′+Δx,y″=y′+Δy,更新标签的坐标值进行迭代计算,当误差小于阈值时,停止迭代,即|Δx|+|Δy|<η。
Chan 算法在求解过程中,首先使用 WLS 算法估计定位标签的初始位置坐标,然后结合已知约束条件再次应用 WLS 算法,得到最终位置坐标估计值。
Chan 算法进行推导,设Z=[x,y,r1]T,可得
将式 (7) 改写为
当矩阵Ga可逆时,Z的最大似然估计值
在实际应用中通常用Q代替φ,则式 (8) 可改写为
根据定位基站与定位标签之间的距离约束关系得到误差矢量
采用 WLS 算法对式 (10) 进行求解,得
3 基于可视化监控与 UWB 无线定位的融合定位
为了解决煤矿井下存在大型设施设备的环境中UWB 信号传输受环境影响显著的问题,进一步提升定位的可靠性和精度,笔者进一步研究了可视化监控与 UWB 融合的定位技术。一方面,将 UWB 定位解算的位置作为初始定位结果,能够实现目标位置的初步确定,同时辅助在可视化监控图像中进行目标定位范围的确定、减少图像处理的复杂度;另一方面,利用图像进行目标 (人像) 的标注,进一步提升定位的可靠性和精度。基于可视化监控与 UWB 无线定位的融合定位流程如图2 所示。
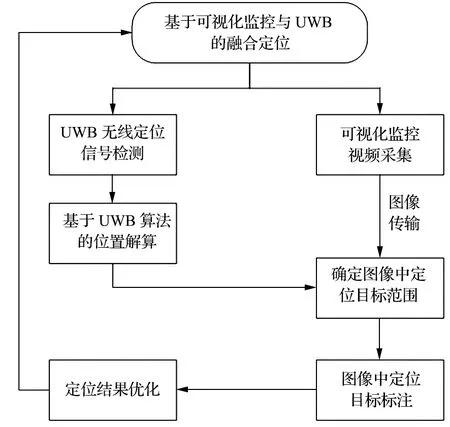
图2 基于可视化监控与 UWB 无线定位的融合定位流程Fig.2 Fusion positioning process based on visual monitoring and UWB wireless positioning
3.1 可视化监控图像采集
系统可视化监控设备主要包括固定式监控设备和非固定式监控设备。其中固定式监控设备主要包括矿用 5G 智能摄像仪、热成像摄像仪和智能摄像仪等。非固定式监控设备主要包括井下人员使用的专用手机以及佩戴的矿灯等设备。系统采用固定式和非固定监控设备结合来实现图像采集。通过监控设备采集到图像信息,利用边缘服务进行视频分析的图像预处理,对采集到的视频进行智能初步的分析、处理和识别,然后利用 5G 等高速通信系统将其传输到地面服务器,根据需要进行视频图像显示和精确分析,形成可视化监控与 UWB 定位融合分析的基础。
3.2 图像目标标注范围确定
利用 UWB 定位获得的位置结算结果,按照该定位区域内的预期误差范围,确定特定直径的圆形区域,针对图像进行圆形区域作为进一步目标标注的处理范围,可以降低图像分析的处理量,降低位置优化时的运算量和时延。
3.3 图像目标标注和定位结果优化
对于特定直径的圆形区域范围的图像进行运算,提取图像背景,再使用原图像减去背景的方法,反复这一过程剔除原图像的背景,然后做二值化处理,并标注二值化图像的八连通区域,最后选取一个最大的连通区域来实现目标标注。利用目标 (人像) 标注的结果,确定优化的定位位置,实现位置定位结果优化,形成最终的融合定位结果。基于可视化监控与人员定位融合的应用系统实景如图3 所示。利用可视化监控修正标记出的人员行动轨迹,如图3 中曲线所示,能够实现目标的精确定位以及轨迹跟踪。

图3 基于可视化监控与人员定位融合的应用系统实景Fig.3 Real scene of application system based on fusion of visual monitoring and personnel positioning
4 试验仿真及分析
仿真定位信号覆盖范围为 300 m。利用 MATLAB软件,分别对 Chan 算法、Taylor 算法以及可视化监控分别融合 Chan 算法、Taylor 算法定位性能进行仿真模拟,如图4 所示。
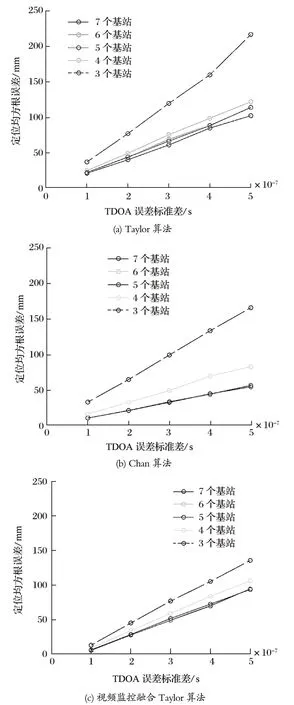

图4 不同基站数量下的仿真数据Fig.4 Simulation data under different number of base stations
由图4 可以看出,对于 Chan 定位算法,仅利用TDOA 方式的人员定位算法,定位性能与基站数量有关;当定位基站参与数量达到 5 时,定位精度改变不大,定位性能达到最优。Taylor 算法定位性能受基站数目影响不大,当基站数量达到 4 时,定位性能达到最优。
与仅通过 TDOA 方式获得的最优定位性能相比,采用可视化监控分别与 Chan 算法和 Taylor 算法的融合进一步降低了定位误差。
采用独立 TDOA 方式进行定位,以及采用可视化监控与 TDOA 方式融合方法定位的误差数据如表1所列。
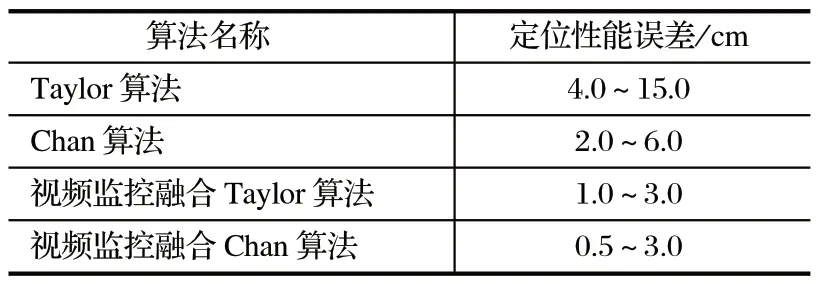
表1 定位性能仿真结果Tab.1 Simulation data of positioning performance
由表1 可知,视频监控融合定位算法相对单独的Chan 算法、Taylor 算法,在定位性能方面获得了明显提升;其中基于视频监控融合 Taylor 算法的定位性能结果最优,在定位性能最优时,使用的基站数量最少,在定位信号覆盖范围 300 m 内,其误差可控制在3 cm。
5 结语
笔者研究了基于 5G 的可视化监控与人员定位系统的融合应用,实现了矿井下监控视频数据的大带宽、低时延的稳定传输,通过视频分析识别技术,可以观察到矿井下人员或设备等目标并进行智能分析。采用 UWB 定位技术中的基于到达时间差技术实现了对矿井下人员的定位,并对其使用位解算法以及融合视频监控算法分别进行了仿真计算。结果显示,可视化监控子系统具有稳定传输视频的优势,人员定位子系统具有精准定位、抗干扰能力强等优势,该系统融合应用可以提升矿井监控视频可视化监控和人员定位的精确性。
