基于虚拟现实技术的机械零件三维重构方法研究*
2023-11-27刘波李秀副
刘波,李秀副
(济源职业技术学院机电工程学院,河南 济源 459000)
0 引言
在工业制造过程中,由于受到加工工艺以及设备磨损等不同原因的影响,导致部分生产的机械零件存在缺陷或者误差,影响产品质量.不合格的零件不仅无法满足使用者的需求,还会造成各种安全事故.质量监测是确保零件质量的重要手段,传统的质量检测方法大部分为人工检测,存在检测效率比较低以及检测结果不准确等问题.相关专家将三维重建技术引入到机械零件质量检测中,但是由于目前对三维重建技术[1-2]具有比较高的要求,因此,仍然存在很多问题需要进一步解决.为此,相关领域的专家在传统研究的基础上给出了一些研究成果,例如马世博等人[3]通过Matlab平台完成目标轮廓特征提取,引入图像处理算法和三维模型重构算法实现最终的三维重构.张雅丽等人[4]对三维重构实验获取的全部图像展开目标提取和拼接处理,获取没有经过处理的拼接图像,采用regionprops函数和形态学完成质心和质心连通区域的特征提取,同时对其展开颜色转换,最终结合插值拟合算法完成三维重构.由于上述两种方法在三维重建过程中没有对目标图像进行预处理,进而导致获取的三维重建效果并不理想.因此,结合虚拟现实技术,提出一种基于虚拟现实技术的机械零件三维重构方法,实验测试结果表明,所提方法可以获取高精度的机械零件三维重构结果.
1 机械零件图像预处理
光照因素在机械零件图像内可以描述为是一种乘性因素,将其表示为公式(1)的形式:
I(x,y)=R(x,y)×L(x,y).
(1)
式(1)中,I(x,y)代表机械零件图像的灰度值;R(x,y)代表机械零件图像在设定点对应的反射率;L(x,y)代表光照情况.
由于光照在机械零件上会随着时间的变化而变化,在确定机械零件图像在(x,y)点的光照区概况后,通过分析(x,y)周围的平均光照情况即可大致确定光照变化规律.在此基础上,将Retinex理论的核心Retinex(x,y)表示为公式(2)的形式:
(2)
式(2)中,F(x,y)代表环绕函数,将式(1)代入到式(2)中,则可以得到:
(3)
经过上述分析可知,Retinex输出机械零件图像并不能够精准掌握光照变化情况,所以需要对不同光照下的机械零件图像进行预处理[5-6],主要步骤如下所示.
1)采用Retinex对输入机械零件图像进行预处理
将待处理的机械零件图像输入到计算机内,为了有效确保平滑图像的高斯窗不能偏大,需要设定尺度参数的取值.对于灰度机械零件图像,采用单尺度Retinex理论进行预处理,对应的表达式如下所示:
Retinex(x,y)=lgI(x,y)-lgI(x,y)⊗F(x,y).
(4)
2)进一步对机械零件图像进行灰度值归一化处理
通过直方图归一化方法对图像进行灰度值归一化处理,对应的计算式如下:
(5)
式(5)中,H(x,y)代表灰度值归一化处理的机械零件图像;mold和mnew分别代表输出机械零件图像的均值和标准差;βold和βnew分别代表归一化处理后机械零件图像的均值和标准差.
2 基于虚拟现实技术的机械零件三维重构
在计算机内采用虚拟现实技术对机械零件进行三维重构[7-8],优先对全部机械零件图像进行预处理,完成预处理以后通过VTK软件完成三维重构,图1给出了机械零件三维重构的流程图.

图1 基于虚拟现实技术的机械零件三维重构流程图
通过分析图1可知,机械零件三维重构[9-10]可以划分为三个阶段,分别为距离测量、三维重构以及三维显示.通过Visual和VTK软件完成基于虚拟现实技术的机械零件三维重构[11-12].其中,通过Visual软件不仅可以有效实现展示界面的设计,同时还可以实现机械零件数据集成等相关工作.VTK软件主要负责机械零件图像重构以及三维可视化处理,是实现机械零件三维重构的重要工具.在启动VTK软件前期,利用图2实现不同机械零件目标图像的源文件目录以及编译目录的设定,全部工作均是在Windows平台实现的.
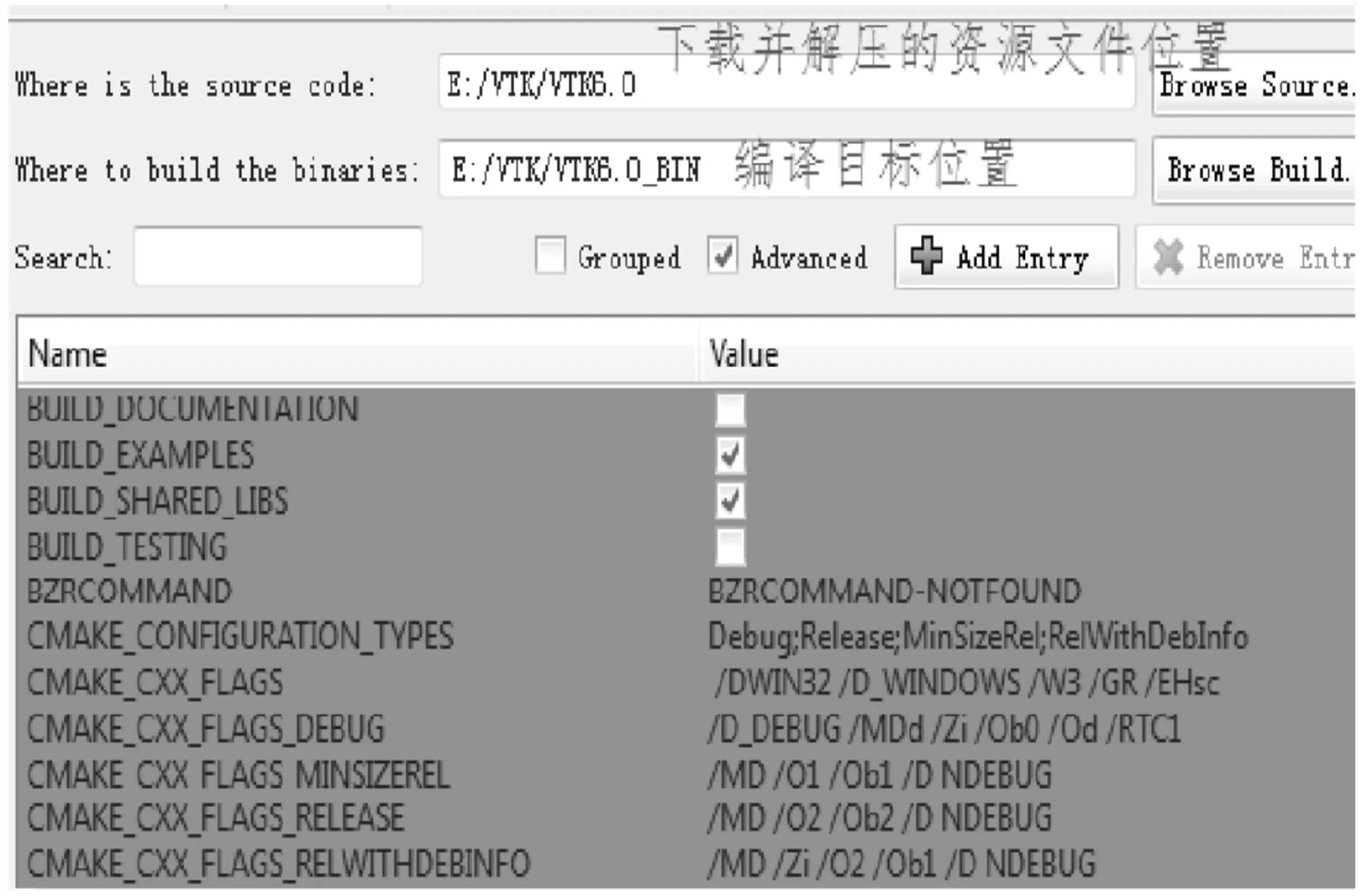
图2 源文件目录和编译目录的设定
在完成图2的相关设定后,需要进一步分析VTK软件中的管道机制,可以有效实现数据或者图像可视化处理.选取包围盒作为基于虚拟现实技术的机械零件三维重构[13-14].另外,采用VTK软件还可以实现机械零件的三维可视化.
首先,采用局部图像梯度信息得到机械零件图像对应的三维坐标,将原始机械零件图像坐标设定为(x,y),则图像重构后获取的机械零件轮廓长度l可以表示为公式(6)的形式:
l=ψ(Ilbf+(1-ψ)Ilgf)+u(l(τ)+φ(p(i))) ,
(6)
式(6)中,ψ代表局部机械零件图像中不同像素领域的灰度值;Ilbf代表边缘轮廓长度对应的约束项;ψ代表稀疏系数;Ilgf代表机械零件图像的局部灰度信息;u代表能量项;l(τ)代表机械零件图像的局部梯度;φ代表常数;p(i)代表空间扫描向量.
根据对机械零件图像目标区域以及背景区域展开平滑度演化博弈处理,进而得到如公式(7)所示的盒子模型:
(7)
式(7)中,N(φ)代表盒子模型;Δρ代表正则项;α代表像素稀疏度.
采用包围盒法可以获取机械零件图像在设定范围内的高斯概率分布H(φ),对应的计算式如下所示:
(8)
结合公式(7)可以获取机械零件图像对应的三维坐标p(f1,f2),对应的表达式如下:
(9)
结合公式(9),通过Euler—Lagrange方程组建三维数据场,对应的表达式如下所示:
(10)
式(10)中,∂代表机械零件图像重构灰度值;t和Δt代表运行时间和采样时间;(λ1,λ2)代表空间扫描向量.
在得到机械零件对应的三维数据场后,需要通过三维数据场完成机械零件的绘制,为了实现机械零件重构[15],需要将目标图像对应的像素作为模板完成匹配Z(ij)(h),计算公式如下所示:
(11)
通过机械零件图像的三维直接体就可以得到三维图像重构表达式f1(x)和f2(x),如公式(12)所示:
(12)
式(12)中,E(x,y)代表机械零件图像固定模板.
3 实验分析
为了验证所提基于虚拟现实技术的机械零件三维重构方法的有效性,通过Delphi语言进行编程,分别选取不同类型的机械零件作为被测对象.
1)简单机械零件三维重构效果分析
选取几种比较简单的机械零件图像进行三维重建,获取的实验结果如图3表示.分别采用两种不同方法对几个比较简单的机械零件进行三维重构,其中通过所提方法可以更加精准刻画和描述各个机械零件的细节部分,而使用文献[3]方法进行三维重构过程中,会出现图像细节丢失等情况.由此可见,采用所提方法可以获取更加理想的三维重构效果.

(a)所提方法 (b)文献[3]方法
2)复杂机械零件三维重构结果分析
实验测试选取结构相对比较复杂的机械零件进行三维重构,通过图4可以看出,在实验对象变为比较复杂的机械零件后,文献[3]方法获取机械零件三维重构结果边缘化更加严重,机械零件的细节部分无法精准描述,进而造成获取的三维重构结果并不理想,而所提方法获取的三维重构结果明显优于文献[3]方法,更进一步验证了所提方法的优越性,同时也充分证明所提方法更加适用于机械零件三维重构.
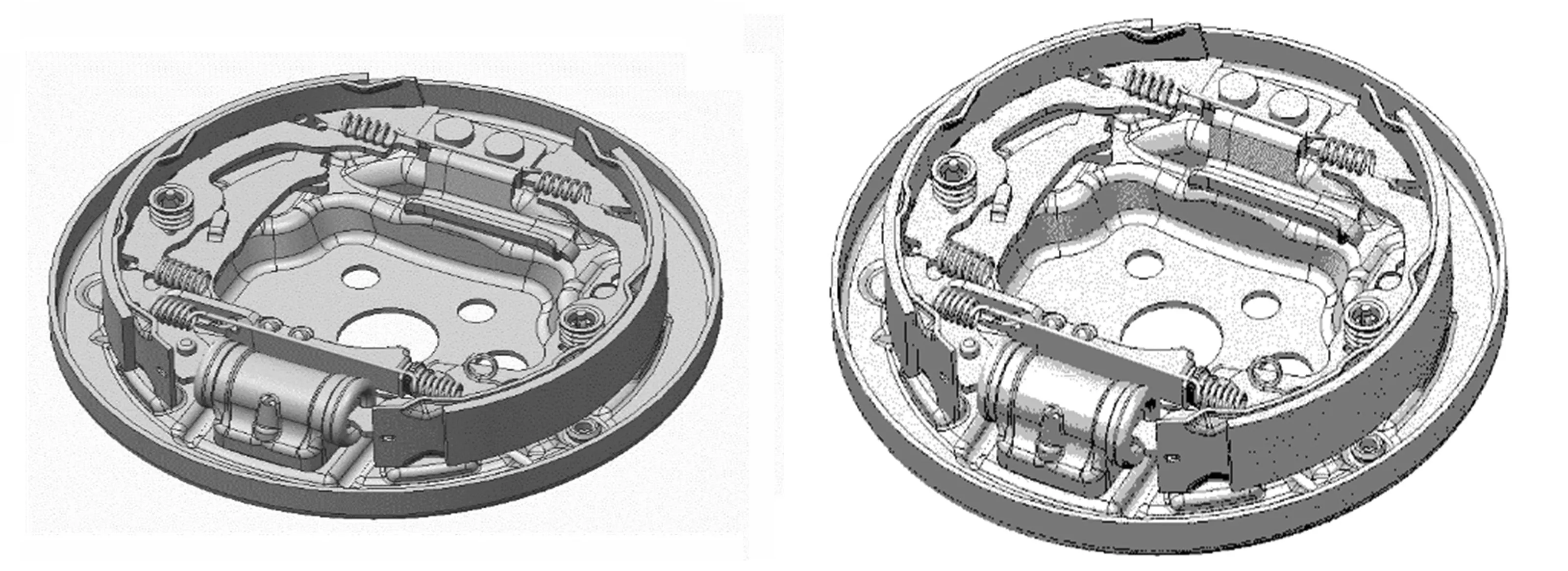
(a)所提方法 (b)文献[3]方法
3)输出三维重构图像遍历覆盖度对比
为了更进一步衡量各个方法的机械零件三维重构结果,实验将输出三维重构图像平均遍历覆盖度作为测试指标进行实验分析,实验结果如图5所示.通过分析图5中的实验数据可知,所提方法获取的输出三维重构图像平均遍历覆盖度明显更高,说明采用所提方法进行机械零件三维重构覆盖区域更加广泛,充分证明所提方法具有良好的重构性能.
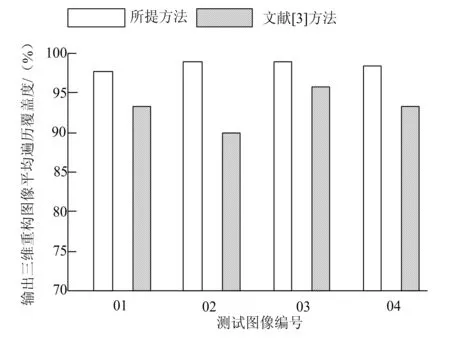
图5 不同方法的输出三维重构图像平均遍历覆盖度实验结果对比
4)机械零件三维重构耗时对比
表1给出各个方法的机械零件三维重构耗时结果,从表1能够看出,通过本文所提方法可以更快的完成机械零件三维重构,说明所提方法具有比较高的运行效率.
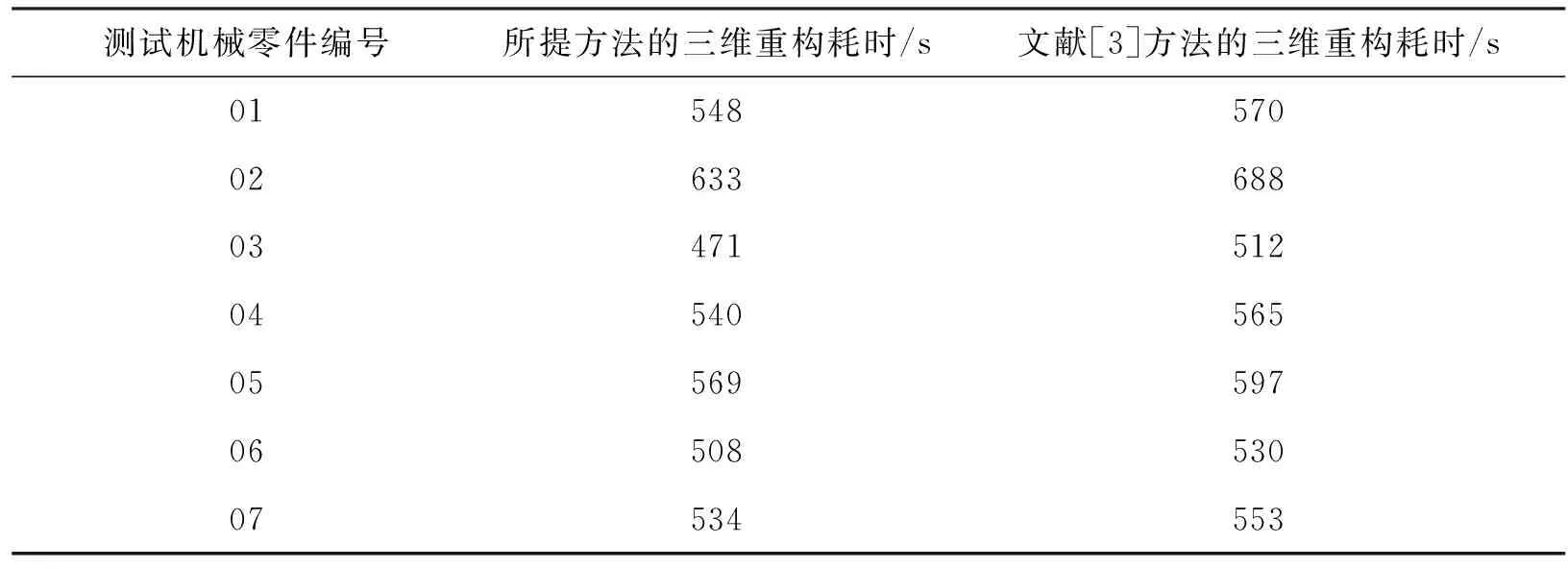
表1 不同方法的机械零件三维重构耗时结果对比
4 结束语
为了有效改善传统三维重构方法存在重构效果不理想以及耗时较长等问题,结合虚拟现实技术,提出一种基于虚拟现实技术的机械零件三维重构方法.实验证明,采用本文所提方法可以有效提升输出三维重构图像平均遍历覆盖度,减少三维重构耗时,获取更加满意的机械零件三维重构结果,同时也证明所提方法适用于机械零件的三维重构.
