不同参数对交叉簧片型柔性铰链刚度特性的影响*
2023-11-27左皓琛
左皓琛,梁 松*,闫 明
(1.沈阳工业大学 机械工程学院,辽宁 沈阳 110870;2.辽宁省冲击防护与损伤评估技术工程研究中心,辽宁 沈阳 110870)
0 引 言
柔性铰链是柔性构件的一个分支,其利用材料的柔性变形来传递力、位移和能量,可以消除侧隙、摩擦和磨损,具有结构简单、质量小等优点,在精密传动和控制领域有着广泛的应用。
将柔性铰链的优点应用在隔振系统中,亦有更优的隔振效果。而柔性铰链的刚度对隔振系统性能有重要影响,刚度与柔性铰链的本身参数和所受载荷紧密联系。由此可见,柔性铰链的刚度特性对柔性铰链的结构设计至关重要。
而要研究柔性铰链一般都会从柔性梁入手。
YIN X等人[1]运用欧拉伯努利梁理论对柔性梁的大变形进行了分析,并采用数值法和封闭法对其进行了求解与验证。交叉簧片型柔性铰链的变形最早由WITTRICK W H等人[2-3]进行了理论分析,假设其为线性小变形(旋转角度小于±5°),进而求得了载荷与旋转角度的关系。HARINGX J等人[4]同样对该类柔性铰链进行了研究,并假设其为对称变形,在此基础上得到了弯矩与变形的关系。GONÇALVES JUNIOR L A等人[5-7]采用迭代法和非线性有限元法,得到了柔性铰链的刚度特性;但在该研究中,研究者对大变形的情况考虑较少。LIU L等人[8]采用了仿真与实验的方法,对多簧片交叉型铰链进行了研究,对其轴向和径向刚度分别进行了分析与计算。BI S等人[9-11]采用近似和仿真的方法,对交叉簧片型柔性铰链的刚度特性进行了研究,得到了载荷与变形的关系;但其采用的方法只在较小变形范围内有效。李永振等人[12]采用理论近似方法对柔性铰链进行了分析,结果表明,只有在垂直载荷和旋转刚度较小时,交叉簧片型柔性铰链的刚度才能近似保持为常值,而再增大垂直载荷,转动刚度也会随之逐渐增大。杜绍扬[13]在针对柔性铰链的研究中,同样得出结论,即随着载荷的增加,该类柔性铰链旋转刚度不再是单一的常量;但他们对柔性铰链刚度特性分析得还不够全面。在实验测量柔性铰链刚度的方法上,文献[14-17]均基于几何光学理论,并搭载了柔性铰链的角位移变形测量平台;但在上述研究中,测量平台测量的工况范围有限。
目前的分析方法大多是针对线性小变形的柔性铰链刚度特性,且没有全面地考虑不同参数对柔性铰链刚度的影响。关于大变形柔性铰链的刚度分析方法的研究也尚不多见。
笔者以交叉簧片型柔性铰链为研究对象,从欧拉伯努利梁理论出发,建立大变形柔性铰链的力学模型,探讨不同载荷和几何参数对刚度的影响规律;给出模型求解方法,采用三维有限元分析模型,建立柔性铰链刚度测量实验装置,以探究不同参数对柔性铰链刚度特性的影响规律。
1 理论变形分析
1.1 铰链受载分析
交叉簧片型柔性铰链示意图如图1所示。

图1 交叉簧片型柔性铰链示意图
图1中,交叉簧片型柔性铰链主要包括固定端、簧片和移动端。
其中,图1(a)表示了簧片的参数,包括长度L、宽度B和厚度T。
图1(b)为几何参数和变形图,包括2根簧片的交叉位置λL(λ∈(0,1))和交叉角度2α(α∈[30°,60°])。当柔性铰链移动端底部中间受垂直力P、水平力F和弯矩M时,将会产生一个旋转角度θ。
交叉簧片型柔性铰链的受载分析模型如图2所示。

图2 交叉簧片型柔性铰链受载分析模型
当移动端底部受到载荷时,两根梁均会产生变形。为了方便分析,笔者将移动端B1B2的中点所受到的P、F和M这3种载荷分别转换到两根梁A1B1和A2B2上,这样就使柔性铰链整体受到的载荷转换到了每根梁上,每根梁所受的力为轴向力Pi、垂直力Fi和弯矩Mi(i=1,2代表梁1和梁2),力的方向以变形前局部坐标系xAiy为基准。
由于考虑了x和y方向的位移,因此,该研究为柔性铰链的大变形分析。
1.2 铰链变形分析
柔性梁的变形计算以欧拉伯努利梁为主,即梁在变形后,总有一个截面的长度保持不变,如图3所示。

图3 柔性梁变形分析
设梁的总长度为L,任意一点位移(x,y)弧长为s,该点处的切向角度为ψ;设梁的端点C处所受轴向力为Pi、垂直力为Fi、弯矩为Mi,则根据曲率的变形关系,任意一点处的弯矩M为:

-Pi(ΔY-Y(X))+Fi(L-X)+Mi
(1)
式中:E为材料的弹性模量;I为截面惯性矩。


(2)
即可得到ψ与u的微分方程,其边值条件为u=0,ψ=0;u=1,dψ/du=LMC/EI,可用打靶法[18]求解该边值问题。
当解出ψ与u的对应关系后,可由下式获得直角坐标系下变形后的形态:
(3)
其中:u0由0到1变化,即可表示梁上任意一点(x,y)处的位移变化。
接着,笔者对柔性铰链的变形进行整体分析。
先对所有变量进行无量纲化处理:
(4)
式中:L为簧片的长度;EI为材料的抗弯刚度。
则根据力的平衡关系可列出以下方程:
f=(p2-p1)sinα+(f1+f2)cosα
(5)
p=(p1+p2)cosα+(f1-f2)sinα
(6)
m=[(p1-p2)cosα+(f1+f2)sinα]λsinαcosθ-
[(p1+p2)sinα-(f1-f2)cosα]λsinαsinθ+m1+m2
(7)
由于B1,B2两点的距离保持不变,可列出x和y两个方向的几何位移平衡式如下:
(δy1-δy2)cosα+(δx1+δx2)sinα=2λsinα(1-cosθ)
(8)
(δy1+δy2)sinα-(δx1-δx2)cosα=2λsinαsinθ
(9)
在式(5)~式(9)中,有11个变量,而只有5个方程,因此,需采用柔性梁变形模型。
笔者首先对式(1)进行无量纲转化,即:
初始条件为:
因此,可求得关于参数δyi和θ的方程如下:
δyi=yi(1),i=1,2
(10)
(11)
而δxi(i=1,2)的表达方式为:
(12)
笔者联立式(5)~式(9)和式(10)~式(12),可列出关于11个参数的非线性方程组,但该方程组没有封闭解,只能采用迭代法进行求解。
L-M法对该类方程有较好的解[19]。设F(x)是关于x的11维非线性方程组,其中,x为δxi,δyi,pi,fi,mi,θ(i=1,2)这11个变量,设定步长使该迭代具有二次收敛性,即可完成求解。
2 刚度特性分析
2.1 弯矩对旋转刚度的影响
接下来,笔者将从交叉簧片型柔性铰链的力学模型出发,开展柔性铰链的刚度特性分析,并讨论几何参数与载荷形式对刚度特性的影响。
一般定义刚度为载荷与旋转角度θ的比值,则旋转刚度KM、水平刚度KF和垂直刚度KP定义为:
(13)
其中:
(14)
式中:pi,fi,mi均为前述非线性方程组解的变量。
由式(13)和式(14)可知:交叉簧片型柔性铰链的刚度与材料的长度L、宽度B、厚度T、弹性模量E以及所受载荷M、F、P均有关。
其中,弯矩M与柔性铰链旋转刚度KM的关系如图4所示。

图4 弯矩M与柔性铰链旋转刚度KM的关系
图4中,考虑旋转刚度,笔者给出了只有弯矩载荷时弯矩M与旋转角度KM的关系,并将其与文献[9]中的分析结果相比较。
由图4可以看出:在弯矩较小时,柔性铰链的旋转刚度与文献[9]的结果相近,且近似为常数;但当弯矩足够大时,旋转刚度出现了非线性变化。
2.2 交叉系数和交叉角度对刚度的影响
几何参数交叉系数λ和交叉角度α对柔性铰链旋转刚度KM的影响,如图5所示。
由图5可知:交叉系数对柔性铰链旋转刚度影响很大,在交叉系数λ=0.5时,旋转刚度最小;当λ接近0或1时,旋转刚度达到最大。当λ由0.5减小到0或增加到1时,旋转刚度以非线性形式增大;且对于不同的交叉角度α,旋转刚度的曲线基本保持一致,即交叉角度对旋转刚度几乎没有影响。
因此,在考虑旋转刚度时,需注重几何参数交叉系数λ的影响。
2.3 垂直载荷和水平载荷对刚度的影响
考虑水平载荷和垂直载荷对旋转刚度的影响,在一定弯矩M下,不同水平载荷F和垂直载荷P对不同交叉系数λ下旋转刚度KM的影响,如图6所示。

图6 垂直载荷P和水平载荷F对柔性铰链旋转刚度的影响
由图6可以看出:水平载荷相对垂直载荷对柔性铰链的刚度影响更大,且交叉系数为0.5,比0.2时的影响更大,这同样证明了图5的分析结果。当水平载荷与弯矩使柔性铰链的变形方向相同时,随着水平载荷的增大,旋转刚度变化较小;当两者方向相反时,旋转刚度变化很大。
因此,笔者需优先考虑交叉系数λ与水平载荷F对旋转刚度KM的影响。
柔性铰链在垂直方向上的刚度远大于水平刚度和旋转刚度,因而垂直载荷对结构的变形位移影响较小,故以下笔者只讨论水平刚度及其受几何参数的影响。
柔性铰链的水平载荷F与水平刚度KF的关系如图7所示。

图7 水平载荷F与水平刚度KF的关系
在图7中,显示出了水平载荷F与水平刚度KF的关系与文献[9]中数据的对比。
由图7可以看出:相比于旋转刚度而言,水平刚度在载荷增大过程中,其近似保持为常值。文献[9]也证明了这一点。
图4和图7都表明,应更侧重于对旋转刚度的分析。
2.4 几何参数对水平刚度的影响
几何参数对水平刚度的影响如图8所示。

图8 几何参数λ,α对柔性铰链水平刚度KF的影响
由图8可以看出:水平刚度相对于交叉系数λ并不是对称分布的,当λ越靠近0,则水平刚度越大;当λ在0.4~0.9范围内,其刚度处于稳定状态;交叉角度α相对于λ对柔性铰链的水平刚度影响较小。
因此,在分析几何参数对其影响时,应首先考虑交叉系数λ。
3 有限元分析与刚度测量实验
笔者采用有限元法和实验测量法,分别对交叉簧片型柔性铰链的刚度特性进行分析,并将二者分析结果与理论分析结果进行比较。
由于这两种方法都对模型的具体参数和施加的载荷有要求,因此,笔者具体分析7种不同参数对柔性铰链的刚度特性的影响。
3.1 有限元分析
7种不同参数均受到相同的弯矩载荷,其中簧片的材料为65 Mn弹簧钢,弹性模量为200 GPa,泊松比μ=0.3,长度L=60 mm,宽度B=10 mm,厚度T=0.5 mm。
具体参数如表1所示。
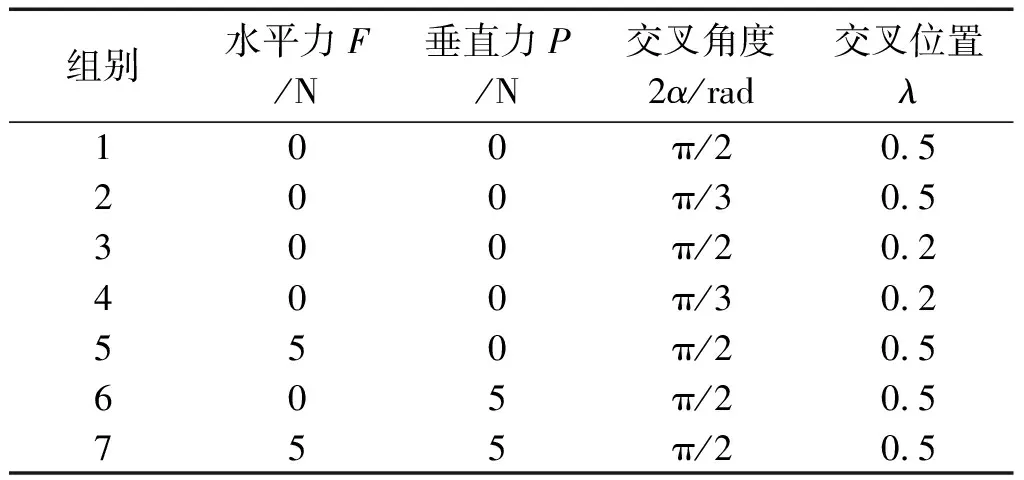
表1 不同参数下的交叉簧片型柔性铰链
表1中,1~4组的交叉系数和交叉角度不同,5~7组施加的载荷不同。
表1中,第1组几何参数下柔性铰链的有限元模型,如图9所示。
为了与实验模型相对应,柔性铰链的边界条件为在固定端施加完全约束,在移动端底部中心偏下一定距离施加载荷。为防止产生扭转,笔者将簧片设为对称型[20-21]。
由于簧片的厚度远小于长度和宽度,且只产生弯曲变形,因此,笔者对簧片采用一阶线性非协调单元划分网格,厚度方向为两个网格;其他地方采用一阶缩减单元网格划分。
为减少计算时间,且不影响分析结果,其上下两端约束为刚体,模型均采用六面体网格。
3.2 刚度测量实验
此外,笔者开展了刚度特性的实验测量方法研究,设计并搭载了柔性铰链刚度测量实验平台。
测量平台的功能模块如图10所示。

图10 柔性铰链刚度测量实验平台功能模块图
该平台主要包括了4种模块,即支撑、夹持、加载和测量模块。它们的功能分别为:1)保证系统有足够的平衡稳定性;2)保持柔性铰链的交叉系数和交叉角度与工况相对应;3)能任意加载水平、垂直和弯矩3种载荷;4)可以测量柔性铰链受载后产生的旋转角度。
柔性铰链刚度测量平台的整体装置如图11所示。

图11 柔性铰链刚度测量平台
图11中,柔性铰链上端固定在铝型材上,下端使用轴承座固定了一个承载轴;弯矩M、水平载荷F和垂直载荷P可以由承载轴传给柔性铰链,利用悬挂在周围的砝码施加载荷,增加或减小砝码的重量可以调整载荷的大小。
其中,水平和垂直载荷与砝码重量相同,弯矩大小为砝码的重力与相应力臂的乘积。
笔者根据几何光学理论的旋转角度测试方法[14],对柔性铰链的变形角度θ进行测量。在初始状态时,激光会通过反射镜在标定靶上确定一个位置。当柔性铰链受载后会产生偏转,位于铰链底端的平面镜会发生转动,进而改变激光的原有路线,使其偏离原有的标记靶位置;当旋转调整镜的角度使激光标记点恢复到原有位置时,调整的角度即为柔性铰链的旋转角度θ,计算载荷与旋转角度的比值即为柔性铰链的刚度。
柔性铰链装置的三维设计图与实物图如图12所示。
柔性铰链主要由簧片、夹片、滑动块和固定装置组成。其中,更改滑动块的位置可以改变柔性铰链交叉系数λ的大小,更改与簧片紧贴的滑动块斜面角度即可调整交叉角度α的大小,即保证与表1中不同的几何参数相对应。
根据表1的前4组数据,笔者分别采用理论方法、有限元方法和实验测量方法,对柔性铰链的刚度进行计算。
对其给定相同的弯矩M,笔者分别计算了理论方法与有限元和实验测法的误差:
(15)
不同参数交叉簧片型柔性铰链旋转刚度如表2所示。

表2 不同参数交叉簧片型柔性铰链旋转刚度
由表2可以看出:相对于理论分析,有限元分析的相对误差小于6%,实验测量的相对误差小于9%,且均与文献[9]的计算结果接近,证明了3种分析方法的结果较为一致,分析方法可靠。
对比表2中第1、2组计算结果可知:在其他参数相同的情况下,几何参数交叉角度α不同,旋转刚度的变化较小;对比2、3组结果可知:交叉系数λ不同,旋转刚度的变化非常大。
以上结果说明,柔性铰链的旋转刚度主要受几何参数交叉系数λ的影响。
笔者对文献[9]、理论方法、有限元模拟方法和实验测量法进行了对比分析,得到了表1中1、5、6、7组不同载荷下的旋转刚度。
不同载荷对柔性铰链旋转刚度的影响对比,如表3所示。
由表3的第1、5、6组数据可知:在施加同样大小的水平(垂直)载荷时,水平载荷使柔性铰链的旋转刚度变化了近1倍,而垂直载荷使旋转刚度的变化不足10%;由第5、7组数据可知:水平载荷单独施加与水平、垂直共同施加下的柔性铰链旋转刚度间的差距很小。
以上结果说明,水平载荷对旋转刚度的影响占主导,而垂直载荷对其影响很小。
3种方法的相对误差在9%内,证明了上述分析是有效的。
笔者分别采用理论方法、有限元方法和实验测量的方法,获取了表1中第1组柔性铰链参数弯矩M与旋转角度θ的关系,如图13所示。

图13 弯矩M与旋转角度θ的关系
由图13可以看出:当弯矩大于150 Nmm时,柔性铰链旋转角度曲线的斜率有变化,表明随着载荷的增加,柔性铰链的旋转刚度不再近似为一个常量,而是产生了非线性变化[22]。
笔者同样采用理论分析、有限元模拟和实验测量3种方法,获取了水平载荷F与水平刚度KF的关系,如图14所示。

图14 水平载荷F与水平刚度KF的关系
由图14可以看出:虽然实验数据有波动,但总体上仍然围绕着一个常量上下浮动;3种方法均表明柔性铰链具有近似恒定的水平刚度,也证明了笔者所用方法的有效性。
4 结束语
刚度特性是交叉簧片型柔性铰链的重要因素,尤其在非线性大变形的情况下。针对现有方法对柔性铰链的刚度特性及影响因素分析不够全面等问题,笔者采用了3种方法对交叉簧片型柔性铰链的刚度特性作了分析。
分析方法及结论如下:
1)采用了理论分析、数值求解、有限元模拟和实验测量的方法,分别对交叉簧片型柔性铰链大变形刚度特性进行了分析。建立了基于欧拉伯努利梁理论分析模型、有限元分析模型,设计并搭载了柔性铰链刚度测量平台,并对三者的分析结果做了比较,总的误差小于9%,表明了分析方法具有足够的精确度和可靠度;
2)分析了柔性铰链的旋转、水平和垂直刚度。在只有弯矩载荷时,当弯矩较小时,柔性铰链的旋转刚度保持为常值;而当弯矩增大时,旋转刚度以非线性方式增加。在只有水平载荷时,柔性铰链的刚度保持恒定。柔性铰链的垂直刚度远大于水平刚度和旋转刚度;
3)讨论了不同参数对柔性铰链刚度的影响。在一定载荷下,柔性铰链的刚度主要受交叉系数λ的影响。交叉系数λ越接近0.5,刚度越小;交叉系数λ越接近0或1,刚度越大;交叉角度α对其刚度影响较小。相对于垂直载荷,水平载荷对旋转刚度的影响更大。在进行柔性铰链的刚度设计与分析时,应重点关注水平载荷与交叉系数。
在未来的研究中,笔者将对不对称的交叉簧片型柔性铰链进行分析,进而研究结构对称性对柔性铰链刚度特性的影响。