高斯过程回归泊松多伯努利衍生滤波器
2023-11-27宋营营宋骊平
宋营营,宋骊平
西安电子科技大学 电子工程学院,西安710071
目标跟踪就是在一定先验信息的基础上,通过雷达、激光、声呐等各种类型传感器所获得的量测信息,对目标状态进行递推估计,从而获得目标的数量以及目标的位置、速度等运动状态信息。目标跟踪技术无论在军事还是民事方面都有着广泛的应用。随着激光雷达、合成孔径雷达、相控阵雷达等高分辨传感器的涌现,出现了所谓的扩展目标跟踪问题。扩展目标和点目标最大的差别就是具有更多的状态特征,其主要体现在量测建模方式上。经过多年的发展,针对不同类型的目标,专家和学者们提出了形形色色的扩展目标建模方法,文献[1]总结了现阶段常用的扩展目标跟踪方法。目前,对扩展目标的建模主要有基于随机矩阵(random matrices,RM)[2]和基于随机超曲面型模型(random hypersurface model,RHM)[3]等方法。随机矩阵方法使用一个对称正定矩阵来描述目标形状,在高斯逆威舍特(Gaussian inverse Wishart,GIW)[4]滤波提出后得以应用在扩展目标跟踪中。文献[5]采用伽马高斯逆威舍特(Gamma Gaussian inverse Wishart,GGIW)为扩展目标建模,提出了一种多模型的伽马高斯逆威舍特-泊松多伯努利混合算法。RHM 与RM 的不同在于,RHM 弥补了随机矩阵忽略传感器噪声的缺点,用比例因子将量测源建模在目标的缩小轮廓上,这两者都可以对椭圆形状目标进行建模。针对不规则形状的建模,西安交通大学的兰剑等人[6]提出了多随机矩阵模型,该模型使用多个椭圆的组合来近似目标形状。还有一类方法是采用径向函数对扩展目标建模。由于径向函数能够表示任意角度下目标运动中心与目标轮廓之间的距离,该方法在理论上适合对任何星凸形状的目标建模。高斯过程(Gaussian process,GP)是由无限维的正态分布函数构成的随机过程,并被广泛应用于机器学习[7-8]。Wahlström等人[9]假设不同角度下的目标径向函数值之间服从多维正态分布,首次将高斯过程回归(Gaussian process regression,GPR)代入贝叶斯公式,提出了用于理想环境下的高斯过程-扩展卡尔曼(Gaussian process-extended Kalman filter,GP-EKF)单扩展目标跟踪算法。基于高斯过程回归的多扩展目标跟踪算法[10]也随之出现。经过多年的发展,扩展目标建模技术已趋于成熟,各种不同的建模方式已经可以满足真实场景的需要。
20世纪90年代,Mahler提出了有限集统计学(finite set statistics,FISST)[11-13],将统计学中的数学概念与目标跟踪技术相结合,为多目标跟踪领域的发展提供了新的思路。基于随机有限集框架下的多目标跟踪方法,将多目标状态与传感器量测分别建模为两个独立的随机有限集(random finite sets,RFS),即状态RFS与量测RFS。在此基础上一系列基于RFS框架的滤波算法被陆续提出,例如基于一阶统计矩近似的概率假设密度(probability hypothesis density,PHD)[14]滤波器和势概率假设密度(cardinality probability hypothesis density,CPHD)[15]滤波器,以及基于有限集概率密度近似的多目标多伯努利(multi-target multi-Bernoulli,MM)[16]滤波器。2015 年,Williams 提出了用于点目标跟踪的面向轨迹的泊松多伯努利(trajectory-oriented Poisson multi-Bernoulli,TO-PMB)滤波器和基于变分近似法的PMB 滤波器[17]。2015年,Williams[18]又提出一种新的全贝叶斯滤波算法,通过概率生成泛函(probability generating function,PGF)完成了对泊松点过程(Poisson point process)以及多伯努利混合(multi-Bernoulli mixture,MBM)相互独立的两部分的递推,随后将多目标状态的概率密度用这两部分来表示,证明这种全贝叶斯随机集的概率密度是先验共轭的[19]。2021 年,Xia 等人[20]将TO-PMB 滤波器和基于变分近似法的泊松多伯努利(Poisson multi-Bernoulli,PMB)滤波器推广到扩展目标,提出扩展目标PMB滤波器。该滤波器是基于PMB的共轭先验分布,其更新步得到泊松多伯努利混合(Poisson multi-Bernoulli mixture,PMBM)[21]后验形式,将多伯努利混合(MBM)部分近似为单个多伯努利形式,从而获得PMB后验分布,实现预测和更新步的递推过程。更新步涉及了PMBM的后验形式,保留了PMBM 考虑所有数据关联假设的优点,因此PMB 滤波器在保持良好滤波性能的同时,具有比PMBM 更高效的计算能力。随机集理论的出现为多目标跟踪的快速发展奠定了坚实的基础。
在扩展目标跟踪中,衍生是扩展目标运动的一种可能情况。文献[22]提出了扩展目标/群目标的衍生模型和合并模型,该衍生模型假设衍生事件是由一个目标衍生出两个目标,且发生在量测生成时。文献[23]提出了两种衍生模型,推导了在衍生目标分布服从这两种模型的情况下衍生概率密度的具体表达式,提出了能对含衍生情况的扩展目标进行跟踪的CPHD滤波器。文献[24]提出了一种多假设衍生模型,可以预测多种可能的衍生事件。含衍生目标跟踪算法的广义标签多伯努利(generalized labeled multi-Bernoulli,GLMB)滤波器[25]中指出衍生目标和新生目标不同的特征在于衍生目标与原目标距离近,初始速度相同,速度变化快,迅速偏离原目标预测门限的衍生目标应当作新生目标处理。文献[26]将衍生目标描述为未知目标,由泊松点过程建模,考虑原目标与衍生目标的关系,提出了含衍生的PMB滤波器,然而该滤波器未考虑到目标形状建模。
扩展目标常用的建模方式是随机矩阵[27],文献[20]就是采用随机矩阵实现椭圆形状的扩展目标跟踪,本文称为GGIW-PMB算法。为了对非椭圆形状扩展目标进行准确的估计,本文引入GPR,通过扩展卡尔曼技术实现GPR 的递归,将结合了GPR 的扩展目标建模方法称为高斯过程回归-伽马高斯混合(Gaussian process regression-Gamma Gaussian mix,GPR-GGM)模型,可用于非椭圆形状目标的建模。另外,考虑到扩展目标的衍生情况,本文提出了一种衍生目标检测及建模方法,将目标关联量测数的变化作为衍生假设的依据,根据真实场景关系计算衍生目标状态,并对衍生目标采用GPR-GGM模型建模。
1 GPR-GGM模型
在GPR-GGM 模型中,扩展目标的运动状态、量测率分别由高斯分布和伽马分布来描述,目标的量测模型采用高斯过程回归模型。目标的状态记为运动状态和扩展状态的组合,即。其中,目标的扩展状态由一组不同角度下目标原点到目标边缘的距离值构成,即[r1,r2,…,rM]。
假设目标的运动状态和扩展状态相互独立,那么目标状态转移方程可以写成以下形式:
量测模型采用高斯过程回归模型,如下式所示:
其中,p(θk)是方向向量,表达式为:
式(3)表示的量测模型对应的观测方程为非线性方程,需要进行非线性处理。文献[9]中采用扩展卡尔曼滤波器实现了GP-EKF单扩展目标跟踪,本文延续文献[9]中的方法对于量测模型的处理也使用扩展卡尔曼滤波器,因此,量测转移矩阵Hk的计算公式为:
那么,就可以得到扩展目标状态估计xk|k和对应误差协方差矩阵Pk|k的计算公式:
采用GPR-GGM模型的扩展目标跟踪中,k时刻目标的概率密度通过泊松率γk和目标状态xk计算,即:
其为伽马高斯混合形式。
2 衍生模型
本文提出一种新的衍生模型,包括衍生事件的判别准则、衍生目标的检测方法以及衍生目标概率密度的计算。
如何判断某一时刻观测区域中是否发生衍生事件是衍生目标跟踪中的一个重要问题。在发生衍生的时刻,衍生目标与原目标距离很近,无法区分衍生目标与原目标的量测,使原目标在扩展形态上发生突变,其扩展范围明显增大;而发生衍生的下一时刻,衍生目标与原目标分离,可以区分量测,原目标的扩展形态又恢复正常。根据这一特性,提出一种可以对某一时刻观测区域中各个目标是否发生衍生进行判断的准则。本文根据量测数的变化设计衍生假设函数,k时刻目标i的衍生假设函数为sk,i=s(Nk-1,i,Nk,i),其中Nk-1,i是k-1 时刻与目标i关联的量测数,Nk,i是k时刻与目标i关联的量测数。当sk,i大于设定阈值时,假设k时刻目标i发生了衍生。
衍生事件发生后,如何检测到衍生目标也需要研究。有的衍生目标检测方法是将衍生目标看作新生目标进行检测,但多数新生目标建模方法都是假设新生目标在指定位置出现,而衍生目标位置大多是未知的,例如飞机发射导弹,导弹作为衍生目标,其出现与否无法预知。若新生目标建模时假定观测区域所有位置都可能出现新生目标,将导致跟踪算法计算量急剧增长,因此不应将衍生目标视为新生目标来建模和检测。
考虑到衍生事件多发生在特定场景下,例如在飞机发射导弹场景中,衍生发生时刻导弹会继承飞机的运动状态,那么可以将飞机的状态赋予导弹,作为导弹这一衍生目标的初始状态。因此,在做出衍生假设后,根据衍生目标与原目标在衍生事件发生时距离相近、速度近似这一特性,计算出衍生目标的初始状态,在下一时刻通过计算出的衍生目标状态进行更新,就能实现衍生目标的检测和跟踪。
假设k时刻扩展目标i发生了衍生,那么衍生目标的初始状态设定为,其中xk,i为k时刻扩展目标i的状态。在此基础上,采用GPR-GGM 模型为衍生目标建模,以实现对其扩展形态的跟踪。将得到的衍生目标参数代入式(10)可以得到k时刻衍生目标的概率密度函数,如下所示:
3 基于高斯过程回归的泊松多伯努利衍生滤波器
假设给定k-1 时刻的后验密度表示为:
算法流程:
步骤1预测。
用sk,i对观测场景中的各个目标是否发生衍生进行判断,假设目标i发生衍生,记得到的衍生目标为iΓ,放入衍生目标索引集IΓ。
步骤2更新。
对式(12)的预测密度更新后得到PMBM形式的后验概率密度,表达式为:
更新后的泊松随机有限集概率密度为:
其中,vΓ(xk)表示衍生目标强度。假设IΓ中有NΓ个目标,那么衍生目标强度的表达式为:
多伯努利混合随机集中参数的计算方法与其对应目标类型,以及该目标是否被检测到有关。对于上一时刻已检测到的目标,这一时刻该目标可能漏检或者产生新的量测。Aj表示全局假设j对应的数据关联空间,每一个Aj中有多个ℂ。ℂ 是包含目标和量测索引的集合用于表示目标和量测之间的关联关系,Cℂ为ℂ 中量测索引对应的量测集合。如果在假设j中,目标i漏检,即ℂ ∈Aj,ℂ={i},Cℂ=∅,那么更新多伯努利随机集的参数计算公式为:
如果在假设j中,目标i被检测到,即ℂ ∈Aj,i∈ℂ,Cℂ≠∅,那么更新多伯努利随机集的参数计算公式为:
如果在假设j中,ℂ 中有量测索引和新生目标标号,但没有存活目标标号和衍生目标标号,即ℂ ∈Aj,ℂ ∩(I∪IΓ)=∅,ℂ ∩Ib≠∅,Cℂ≠∅,也就是检测到新目标量测的情况,那么更新多伯努利随机集的参数计算公式为:
如果在假设j中,ℂ 中有量测索引和衍生目标标号,但没有存活目标标号和新生目标标号,即ℂ ∈Aj,ℂ ∩(I∪Ib)=∅,ℂ ∩IΓ≠∅,Cℂ≠∅,也就是检测到衍生目标量测的情况,那么更新多伯努利随机集的参数计算公式为:
如果在假设j中,ℂ 中有量测索引,但没有存活目标标号、新生目标标号和衍生目标标号,即ℂ ∈Aj,ℂ ∩(I∪Ib∪IΓ)=∅,Cℂ≠∅,也就是检测到杂波的情况,那么更新多伯努利随机集的参数计算公式为:
更新后,每个多伯努利随机集中表示已检测到目标数目的值与预测的值相同,表示新潜在检测目标个数的值变为| IjI|。
步骤3变分合并。
变分合并技术[17]是解决MB 近似问题的一种技术。GPR-PMBS滤波器的预测密度如式(13)所示,经过贝叶斯更新后得到PMBM形式的后验概率密度如式(17)所示,要实现递归,需要使用变分合并技术将式(17)中的MBM密度进行变分合并得到MB密度。将式(17)中的MBM 密度用式(30)表示,记为f(X),变分合并后得到的MB密度用式(31)表示,记为g(X)。
MBM近似的目的就是找到使得f(X)和g(X)之间的KL 散度最小的g(X),也就是找到使得下式最小的g(X):
变分合并技术将g(X)的求解问题转换为下式的求解:
将f(X)中的伯努利与g(X)中的伯努利之间的对应关系视为缺失数据q(π),那么式(33)所示优化问题的求解相当于寻找最佳缺失数据分布(π)。
经过整理,式(33)变为:
解决式(34)所示优化问题的标准方法是块坐标下降,在gl(Xl)(M 步)和qj(πj)(E 步)的最小化之间交替进行。简化缺失数据的表达式之后可以得到如下M步和E步新的表示。
M步表示为:
E步表示为:
其中,q(h,l)满足以下条件:
此时,MBM近似问题转化为M步和E步块坐标下降,可以使用单纯形算法[21]等方法得到近似后的MB密度。
4 仿真分析与比较
基于GGIW建模的PMB与PMBM算法是当前主流方法中效果最好的两种多扩展目标跟踪算法,二者的区别在于GGIW-PMB 通过使用MB 近似技术,减少了计算复杂度,实现了比GGIW-PMBM更快的计算速度,二者在跟踪精度上没有明显的差别。本文基于PMB滤波器,故而未与PMBM滤波器作对比。
为了验证本文算法的性能,设计了两组实验。实验1验证了采用GPR-GGM模型对扩展目标建模后,PMB滤波算法在多扩展目标跟踪中对扩展形状估计效果的提升。实验2验证了提出的衍生目标模型及相应的GPRPMBS算法能够检测并跟踪衍生目标。
4.1 算法性能评价指标
4.1.1 GOSPA距离
GOSPA(generalized optimal sub-pattern assignment)[28]是为了解决OSPA 距离中,若其中一组集合为空时,在相同的参数条件下,无论另一组集合内的元素如何变化,两组集合的OSPA距离都相等的情况提出的。它通过在集合势误差内添加参数去计算得到与集合势误差不同的位置误差,去除了OSPA 距离的归一化,也可以说GOSPA距离是OSPA距离非归一化的表现形式,它通过计算得到集合间所有距离之和,它的值会随着真实值和估计值距离的增大而增大,对于计算集合势误差有一定范围的缩放比例。
当c >0,p≥1,且集合势误差归一化参数α满足0 ≤α≤2 时,GOSPA距离可以表示为:
式中,随机有限集合X和Y分别表示X={x1,x2,…,xn}和Y={y1,y2,…,yn},|X|和 |Y|分别表示集合X和Y内元素的总个数,π表示集合Y内所有元素的可能排列情况。
当α=2 时的GOSPA距离可以看作由定位误差、虚警误差和漏检误差三部分组成[28]。
4.1.2 IOU
IOU体现了算法对目标形状估计的精确度,假设R和分别是为目标的真实形状和估计的形状,IOU的计算方法如下:
4.2 仿真分析与比较
4.2.1 实验1
实验设定[-400,400]×[400,400]内为监控区域,在监控区域内有三个不同形状的扩展目标,实验中假设目标形状不变化。目标真实运动轨迹如图1所示。
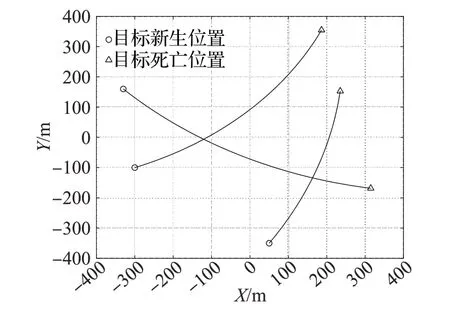
图1 目标真实轨迹(实验1)Fig.1 Target real trajectories(Experiment 1)
目标运动遵循匀转弯运动模型。运动状态转移矩阵、过程噪声协方差矩阵、扩展状态转移矩阵及其噪声协方差矩阵分别为:
其中,采样时间T=1 s,ω为匀转弯速度,整个跟踪时长为50 s。过程噪声方差1,形状动态参数α=0.000 1。高斯过程回归模型采样点数M=50,k(θ,θ)为GP协方差函数。
目标1 是长轴为4 m,短轴为3 m 的十字形目标,初始状态为[-300;-100;0;13;5;ω];目标2是长轴为5 m,短轴为3 m 的椭圆目标,初始状态[-330;160;0;13;-13;ω];目标3 是长为6 m,宽为4 m 的矩形目标,初始状态[50;-350;0;10;15;ω]。目标量测率设置为20,跟踪区域杂波率为8,量测噪声协方差R=0.01*I2。目标的存活概率和检测概率分别为pS=0.99,pD=0.98 。GOSPA参数为p=2,c=5。
实验1 将本文提出的基于高斯过程回归的泊松多伯努利(GPR-PMB)算法与GGIW-PMB 算法进行比较,对比分析了二者在多扩展目标跟踪中的性能。表1 是GPR-PMB 和GGIW-PMB 算法的运行时间。从表中可以看出,GPR-PMB算法相比GGIW-PMB算法的运行时间要长,因为高斯过程回归模型的引入使得GPR-PMB算法的时间复杂度要高于GGIW-PMB算法。

表1 GPR-PMB和GGIW-PMB算法的运行时间Table 1 Running time of GPR-PMB and GGIW-PMB
图2 是实验仿真得到的多目标运动轨迹局部放大图。从图中可以看出,基于随机矩阵的GGIW-PMB 算法只能将目标扩展形状近似为椭圆,而高斯过程回归可以更为精确地估计出目标的轮廓。
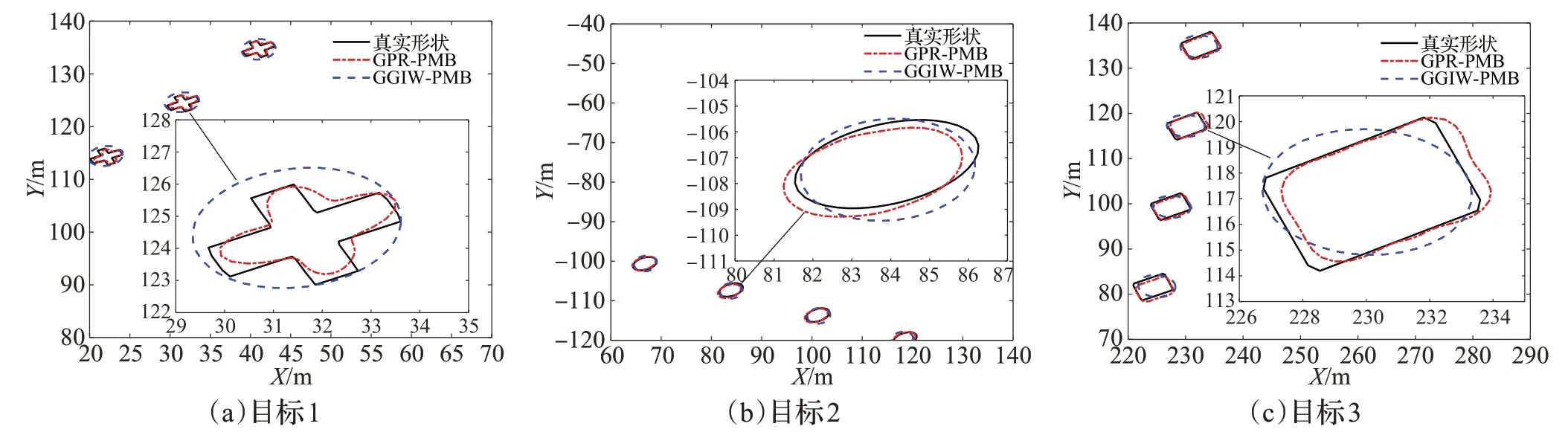
图2 估计形状与真实形状对比图Fig.2 Estimated shape versus real shape
图3 是将三个目标扩展状态估计结果与真实扩展状态进行对比计算得到的IOU图。从图3中不难看出,所提算法能够跟踪不同形状的目标,且估计的扩展形状能较好地反映目标的真实几何形状信息。采用高斯过程回归量测模型对目标形状进行建模,能对目标形状做出更准确的估计,从而得到更精确的运动状态估计结果。

图3 IOU对比图Fig.3 IOU comparison diagram
图4是GPR-PMB算法和GGIW-PMB算法的GOSPA对比图。从图中可以看出,少数时刻GPR-PMB 算法与GGIW-PMB 算法的GOSPA 距离相同,多数时刻GPRPMB 算法的GOSPA 距离优于GGIW-PMB 算法。从上述实验结果中可以看出,本文所提GPR-PMB 算法相比于GGIW-PMB 算法尽管运算复杂度有所增加,但对目标的运动状态和扩展状态的估计效果都有所提升。
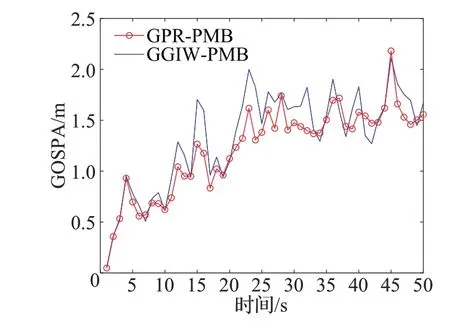
图4 GOSPA对比图Fig.4 GOSPA comparison diagram
4.2.2 实验2
本文提出了新的衍生目标模型,实验2设定衍生场景来验证所提衍生目标模型的有效性。本实验仍采用实验1 的运动模型,但设定了衍生场景:假定目标1 在25 s 时刻发生衍生,衍生得到长轴为0.75 m,短轴为0.25 m的椭圆目标,记为目标4;假定目标2在32 s时刻发生衍生,衍生得到长为2.50 m,宽为1.25 m 的矩形目标,记为目标5。目标真实轨迹如图5所示。
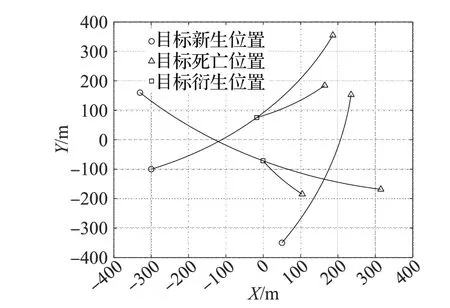
图5 目标真实轨迹(实验2)Fig.5 Target real trajectories(Experiment 2)
实验2 将本文算法与GGIW-PMB 算法及不含衍生模型的GPR-PMB 算法进行比较,对比分析了三者在含衍生情况的多扩展目标跟踪中的性能。图6 为三种算法跟踪过程中每一时刻估计的目标数。0~25 s期间,三种算法估计的目标数相同,都能正确地给出真实目标数;第一个衍生目标在25 s 时刻出现,第二个衍生目标在32 s时刻出现,从26 s及之后时刻三种算法的估计目标数中可以看出,采用了衍生模型的GPR-PMBS 能够在衍生发生的下一时刻跟踪到衍生目标,而GGIWPMB 算法和不含衍生模型的GPR-PMB 算法无法检测并跟踪衍生目标。
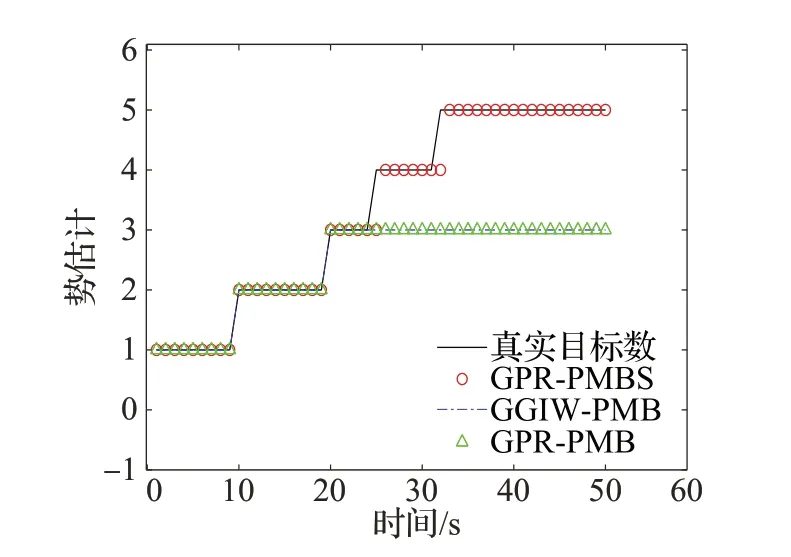
图6 势估计对比图Fig.6 Comparison diagram of cardinality estimations
5 结论
本文研究了PMB扩展目标跟踪算法中的非椭圆扩展目标形状估计问题,引入GPR,通过扩展卡尔曼技术实现GPR 的递归,得到了可用于非椭圆扩展目标建模的GPR-GGM模型。在此基础上,研究了衍生目标跟踪问题,结合提出的衍生模型,得到了一种能跟踪不同形状扩展目标和衍生目标的GPR-PMBS算法。该算法采用GPR-GGM模型对扩展目标进行建模,并结合提出的衍生模型,能实现对含衍生目标的不同形状扩展目标进行跟踪,仿真结果验证了本文算法的有效性。