3-PRPS/RRR踝关节康复机器人运动机理研究与试验
2023-11-27李辉宁峰平郭辉李瑞琴
李辉, 宁峰平, 郭辉, 李瑞琴
(1.吕梁学院 矿业工程系, 山西 吕梁 033001; 2.中北大学 机械工程学院, 山西 太原 030051)
0 引言
踝关节康复机器人在我国具有强大的市场潜力。一方面,踝关节比较容易受到损伤,尤其是从事篮球及足球等运动员,另一方面,由于我国人口众多,具有运动功能障碍需要进行康复训练的患者较多,需要踝关节康复机器人代替低效率的康复训练师-患者一对一的康复治疗模式[1]。
踝关节功能障碍的一个重要因素是中枢神经系统受损,需要通过刺激中枢神经系统,促进运动系统感知功能的恢复[2],因此必须对患者进行物理治疗[3-4]。在治疗过程中,患者逐渐恢复踝关节的可运动范围,增强肌肉的力量,恢复动态平衡,从而逐渐恢复运动功能[5]。
目前踝关节康复机器人现有产品的构型一般为连杆或串联机构[6-8],这种构型一般存在机构转动中心与踝关节转动中心不重合的问题,从而影响康复治疗的效果。构型为并联机构的踝关节康复机器人在设计上就能够保证机构的转动中心与踝关节转动中心始终重合,且并联机构具有精度高、稳定性强、承载力大的特点[9],十分适合应用于踝关节的康复治疗,因此关于这类机构的研究是当前的热点[10-16]。
除构型可靠外,踝关节康复机器人还应具有可操控性或刚柔软结合特性,以适宜患者的使用。王海芳等[17]提出一种3自由度的3-SPS/S机构用于踝关节康复治疗,并搭建康复治疗软件系统,验证了该设计方案的可行性。张彦斌等[18]提出一种无运动耦合的两转动并联机构,通过分析其运动学和动力学特性验证了该机构能够应用于踝关节康复治疗。Ma等[19]提出一种柔性关节的2自由度机构,对柔性关节进行应力分析,验证了该机构用于踝关节康复治疗的可行性。
本文提出一种3-PRPS/RRR踝关节康复机器人,通过闭环矢量法得到机器人的位置逆解,以此为基础,通过粒子群优化(PSO)算法求解机器人的位置正解,得到机器人的工作空间,推导机构的雅克比矩阵计算机构的奇异位形,通过生物力学建模软件进行康复训练仿真,搭建试验样机,验证了该机器人用于踝关节康复治疗的可行性。
1 数学建模与自由度分析

图1 踝关节康复机器人模型Fig.1 Ankle rehabilitation robot model
3-PRPS/RRR踝关节康复机器人如图1(a)所示,机构简图如图1(b)所示,图中:Os表示固连在静平台上的定坐标系;Od表示固连在动平台上的动坐标系;Hi(i=1, 2, 3)表示第i条支链固定在静平台上的滑轨;Ai表示第i条支链的滑块;Bi表示第i条支链的转动副;Ci表示第i条支链的移动副;Di表示第i条支链与动平台连接的球副;E1表示垂直固定于静平台上的连杆;E2表示与E1固连的圆弧形滑轨;E表示与E2配合的滑块,能够在E2上绕z轴滑动;K表示与E固连的转动副,其转动轴线为x′轴;杆G1G2通过转动副K与EK连接,并在G1、G2通过转动副与动平台连接,其转动轴线为y′轴;θi表示CiBi和BiAi的夹角;l1i表示Hi到原点Os的距离;l2i表示杆BiAi的长度;l3i表示杆CiBi的长度;l4表示杆EE1的长度。由图1(b)可知,3-PRPS/RRR踝关节康复机器人是一种基于并联机构的康复机器人,由静平台H1H2H3、动平台D1D2D3、3条驱动支链AiBiCiDi和1条约束支链EKG1(G2)组成。
支链14个运动副对应的旋量为
(1)

由式(1)可知,支链1不存在反旋量,为一个6自由度支链。
支链2、支链3的运动副对应的旋量分别为
(2)
(3)

与支链1相同,支链2与支链3也是6自由度支链。
约束支链运动副对应的旋量为
(4)
式中:xOd、yOd、zOd为动坐标原点Od在定坐标系中的坐标值。
由式(4)可知,约束支链为一个具有3转动自由度的支链,其转动中心为动坐标原点Od,故3-PRPS/RRR机构是一个只能绕Od点转动的3自由度机构,且Od点为人体脚踝的转动中心。
2 3-PRPS/RRR机构的位置逆解
本文采用闭环矢量法求解3-PRPS/RRR机构的位置逆解。当动平台绕Od的x′轴、y′轴、z′轴依次转动α、β、γ角度时,动平台Di点在定坐标系中的坐标Di为
(5)
式中:Di0=[xDi0yDi0zDi0]T,xDi0、yDi0、zDi0为Di在动坐标系中的初始坐标;R(α,β,γ)为动平台的旋转矩阵,

(6)
由图1(b)几何关系可得,B1在y轴上的坐标等于D1在y轴上的坐标,B2、B3在x轴上的坐标分别等于D2和D3在x轴上的坐标,因此Bi在定坐标系中的坐标列向量Bi为
(7)
则DiBi的长度l3i,即输入pi为
(8)
当给定转角α、β、γ的值时式(8)是可解的,展开式(8),得
(9)
式中:
式(9)即为3-PRPS/RRR机构的位置逆解方程。
3 3-PRPS/RRR机构的位置正解
3.1 正解算法
本文采用PSO算法求解机构的位置正解。
1) 建立PSO的目标函数:
(10)
式中:q1、q2、q3为驱动的输入参数。
2) 建立PSO算法的适应度函数:
F=|f1|+|f2|+|f3|
(11)
当F<0.001时,所得解满足要求。
3) 初始化PSO算法参数。PSO算法的速度更新公式和位置更新公式为
v(j)=ω(t)·v(j)+c1·rand()·(pbest-x(j))+c2·rand()·(gbest-x(j))
(12)
(13)
x(j)=x(j)+v(j)
(14)
式中:v(j)为第j个粒子的速度;ω(t)为惯性因子,t为种群已进化代数;c1、c2为学习因子;rand()为介于(0, 1)之间的随机数;pbest、gbest分别为个体最优位置和种群最优位置;x(j)为粒子的当前位置;ωmax、ωmin分别为惯性因子的最大值和最小值;tmax为种群总进化代数。
PSO算法流程如图2所示。

图2 PSO算法流程图Fig.2 Flow chart of the PSO algorithm
数值解法不同于解析解,一次计算无法得到机构的所有正解,因此在求解时将α、β、γ的取值范围分为8个卦限,在每个卦限内使用PSO算法求解局部的位置正解,最终综合8个卦限的计算结果,得到机构的所有位置正解。
3.2 数值算例
给定机构的设计参数,如表1所示。给定Di点在动坐标系中的初始坐标Di0,如表2所示。给定PSO算法的各个参数,如表3所示。
由于动平台绕x′轴、y′轴、z′轴依次转动的α、β、γ角度不容易通过观察得到,将D1在定系中的坐标作为输出,能够直观地显示正解的正确性。输入 3组不同的参数,其输出结果如表4所示,适应度曲线如图3所示,3组算例对应的位姿分别如图4~图6所示。

表1 机构的设计参数Table 1 Design parameters of the mechanism

表2 Di在动坐标系中的初始坐标Table 2 Initial coordinates of Di in the moving coordinate system

表3 PSO算法参数Table 3 PSO algorithm parameters
由图4~图6可知,由PSO算法所得的机构位置正解与CAD模型一致,验证了机构正解的计算方法是正确的,PSO参数的选择是合理的。
4 3-PRPS/RRR机构的工作空间
3-PRPS/RRR机构的设计参数已给出,如表1所示,假设3条支链驱动副P的伸缩量均为-10~10 mm,以0.5 mm为步长,共取得64 000个点,利用位置逆解方程,将前一次的计算结果作为下次计算的初值,通过不断迭代[20],可得3-PRPS/RRR机构在驱动器许动的范围内机构的工作空间(动平台绕x′轴、y′轴、z′轴转动的角度依次为α、β、γ),如图7所示。
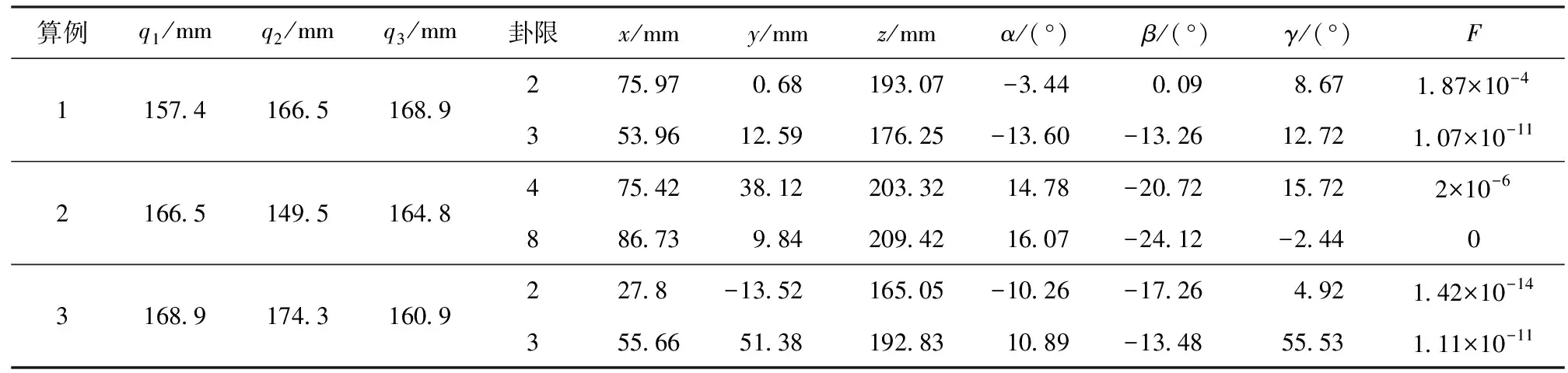
表4 位置正解算例Table 4 Examples of forward kinematic solutions
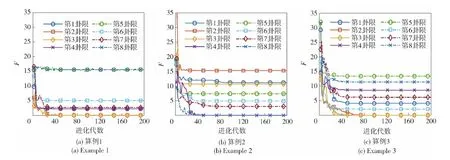
图3 适应度曲线Fig.3 Fitness curves
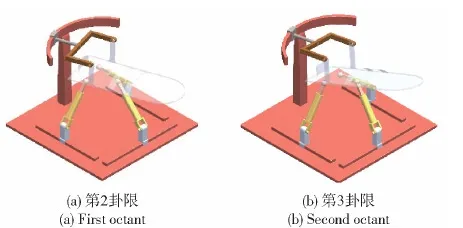
图4 算例1的位姿Fig.4 Poses of example 1
图5 算例2的位姿Fig.5 Poses of example 2

图6 算例3的位姿Fig.6 Poses of example 3

图7 机构的工作空间Fig.7 Workspace of the mechanism
由图7可得:当机构绕x′轴旋转时α的工作范围,即踝关节康复机构在进行单一的内翻/外翻运动时的工作范围为-13.5°~13.5°;绕z′轴旋转时γ的工作范围,即踝关节康复机构在进行单一的内收/外展运动时的工作范围为-21.12°~21.12°;绕y′轴旋转时β的工作范围,即踝关节康复机构在进行单一的跖屈/背屈运动时工作范围为-26.93°~26.93°。
值得注意的是,由仿真模型验证可知,P副的-10~10 mm许动范围并不是机构在表1所示设计参数下的最大值,仅为减少计算量,验证工作空间求解方法的正确性而选取,求解机构的最大工作空间属于优化设计的工作之一,在此不做讨论。
由于图7不能直观地表示踝关节康复机构在做复合运动时的工作空间,使用D1点在空间中的活动范围表示机构的工作空间,如图8所示。
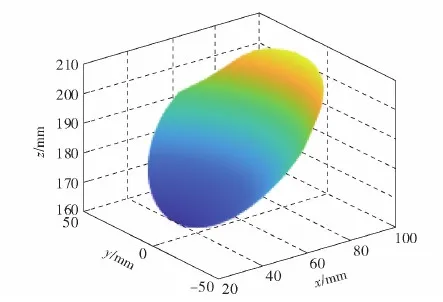
图8 D1的工作空间Fig.8 Workspace of D1
5 运动学奇异性分析
奇异位形是机构在其工作空间内的某些特殊位姿,在这些位姿下,机构可能表现出驱动失去对动平台位姿控制的能力,或动平台的载荷无法由驱动产生的力所平衡,导致机构整体的运动性能变差,甚至机构本体受到破坏,因此在机构设计时必须考虑奇异位形对机构的影响。本文采用推导雅克比矩阵的方法表示机构的奇异位形。
式(9)等号两边平方后对时间求导,得
(15)
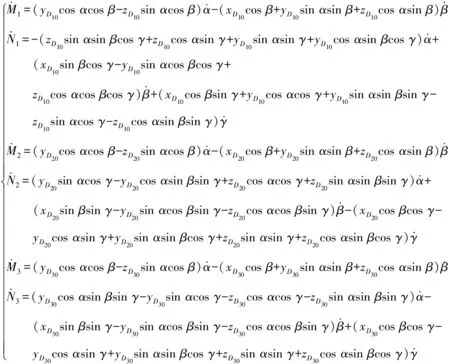
(16)
(17)
(18)
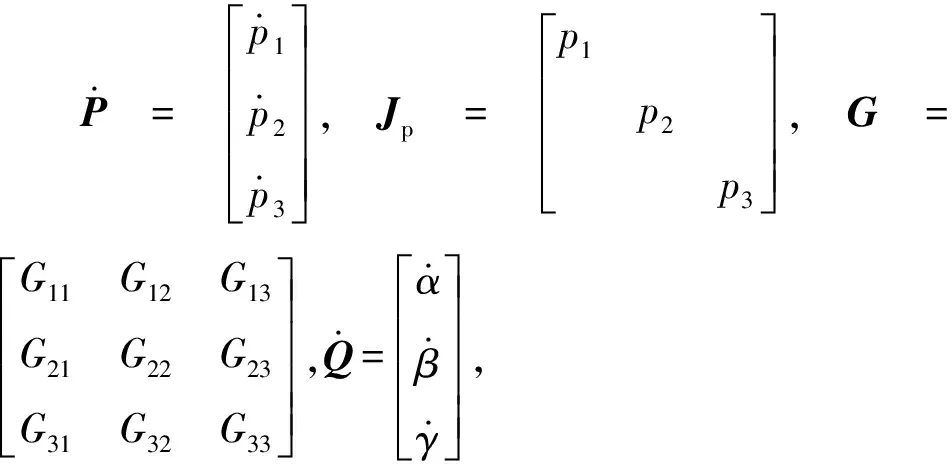
若矩阵G存在逆矩阵,则3-PRPS/RRR踝关节康复机构的雅克比矩阵J为
J=G-1Jp
(19)
当|Jp|=0时,该奇异位形属于1类奇异性,表示存在非零驱动速度,但动平台无法移动;当|G|=0时,该奇异位形属于2类奇异性,表示当驱动锁死时,动平台依然存在微小的不受控制的运动;当|Jp|=|G|=0时,该奇异位形属于3类奇异性,表示当驱动锁死时动平台能够移动,当动平台锁死时驱动关节能够运动。
根据3-PRPS/RRR机构的结构特性可知|Jp|必不为0,因此3-PRPS/RRR机构不存在1、3类奇异性,只需要讨论机构的2类奇异性,即|G|=0的情况。
矩阵G中元素的变量为α、β、γ的三角函数,|G|=0的表达式为三元非线性方程,无法得到方程的解析解,因此需要使用数值算法计算机构的奇异性。在第4节中,为求得3-PRPS/RRR机构的工作空间,共计算机构64 000个工作点,即计算出了机构64 000种不同的α、β、γ组合。因此以这 64 000个工作点分别为初始值,利用Fsolve函数计算|G|=0的数值解并判定标记,若标记表示结果可信,则求出的数值解为机构的奇异位置,若结果不可信,则表示机构在该点附近无奇异位置。
利用上述方法编写脚本文件,计算所有工作点后,得到3-PRPS/RRR机构在其工作空间内无奇异位形,机构的运动性能良好。
6 踝关节康复训练仿真
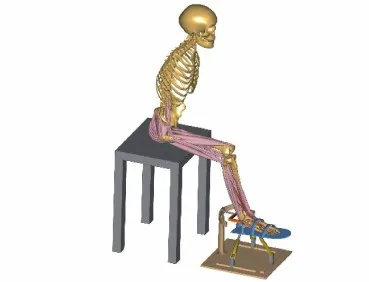
图9 坐姿下踝关节康复机器人-人体骨肌耦合系统Fig.9 Ankle rehabilitation robot-human musculoskeletal coupling system under sitting posture
使用AnyBody Modeling System v.7.2生物力学建模软件对本文所建坐姿下用踝关节康复机构的康复训练的骨肌系统进行仿真模拟。基于AnyBody软件中的模型库,并根据中国成年人人体尺寸标准[21],建立了一个身高为1.75 m,体重为75 kg的成年男性骨肌系统模型,如图9所示。该模型由头部,颈部、躯干和右腿(盆骨,股骨,胫骨,髌骨,距骨和足骨)构成,右腿肌肉由169条Hill肌肉束模型进行代替[22]。其中,本文所建骨肌系统模型中的骨骼尺寸、骨骼和肌肉质量以及肌肉强度等建模参数根据文献[23]中提供的统计学比例参数进行确定,该模型具有一定的统计学意义。
在踝关节康复领域,为有效恢复踝关节附近肌肉的肌肉力量,除了所建踝关节康复机构所能达到的运动范围需要达到正常踝关节所能达到的最大范围外,本文所建踝关节还需要在跖屈/背屈、外展/内收和内翻/外翻这3个运动自由度方向上需要设定一定的阻尼,以满足踝关节康复训练的要求。依据文献[24]中对于踝关节3个运动自由度方向上的最大运动范围和可承受最大被动力矩的描述,设定运动范围:跖屈/背屈为-20°~20°,内翻/外翻为-13°~13°,外展-内收-25°~25°。同时,为进一步研究对比不同阻尼值下患者的康复效果,阻尼选取0 N·m、10 N·m、20 N·m、30 N·m。
根据设定运动范围,使踝关节在不同阻尼值下进行跖屈/背屈、内翻/外翻、内收/外展运动,如图10~图12所示。仿真得到胫骨前肌、趾长伸肌、趾长屈肌和腓骨长肌这4条肌肉在不同阻尼值下运动时的肌肉激活度,如图13~图15所示。

图10 跖屈/背屈运动Fig.10 Plantarflexion/dorsiflexion motion
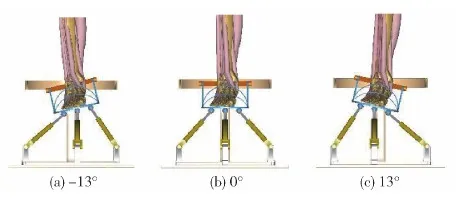
图11 内翻/外翻运动Fig.11 Inversion/eversion motion
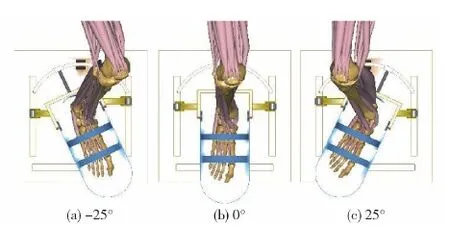
图12 内收/外展运动Fig.12 Adduction/abduction motion
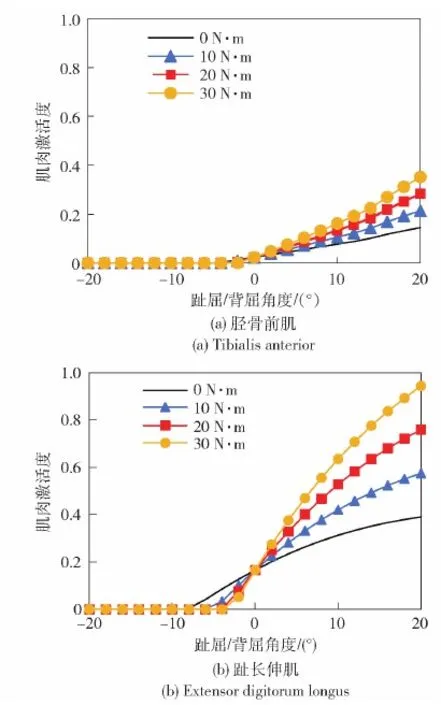
图13 跖屈/背屈时肌肉激活度Fig.13 Muscle activation during plantarflexion/ dorsiflexion motion

图14 内翻/外翻时肌肉激活度Fig.14 Muscle activation during inversion/ eversion motion
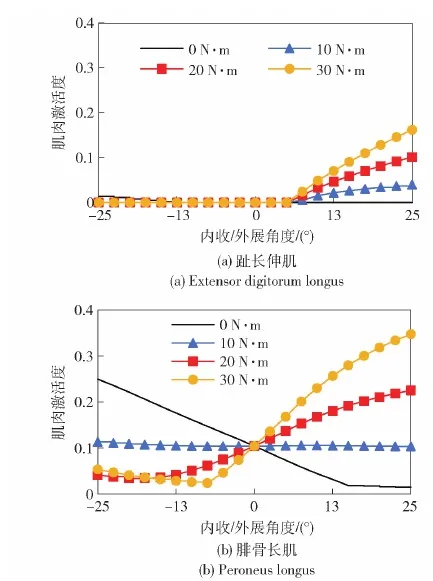
图15 内收/外展时肌肉激活度Fig.15 Muscle activation during adduction/ abduction motion
在跖屈/背屈、内收/外展和内翻/外翻运动上,随着所设定阻尼值的增加,所研究的肌肉激活度也呈现出一定的规律性变化:在跖屈/背屈运动中,胫骨前肌和趾长伸肌的肌肉激活度在背屈阶段会随着阻尼值的增大而增大,而在跖屈阶段呈现出相反的趋势;在内翻/外翻运动中,趾长屈肌在内翻/外翻阶段中均被激活,其肌肉激活度在外翻阶段会随着阻尼值的增大而增大,在内翻阶段会随着阻尼值的增大而减小,而腓骨长肌只在外翻运动中被激活,其肌肉激活度均随着阻尼值的增大而增大;在内收/外展运动中,腓骨长肌仅在外展阶段被激活,其肌肉激活度随着阻尼值的增大而增大,但是对于趾长伸肌来说,其肌肉激活度的变化趋势与其在跖屈/背屈运动中的变化相同,在内收阶段,肌肉激活度会随着阻尼至的增大而减小,而在外展阶段则会随着阻尼值的增大而增大。
总之,在整个施加运动阻尼的康复运动过程中,各条肌肉总会在某一运动过程中达到较高的激活度,这意味着在这一阶段神经对肌肉的募集程度较高,即达到了康复训练的目的。
7 样机试验验证
搭建3-PRPS/RRR踝关节康复机构的试验样机,如图16所示,验证机构运动性能及工作空间计算结果的正确性。试验样机的设计参数如表5所示。

图16 试验样机Fig.16 The experimental prototype
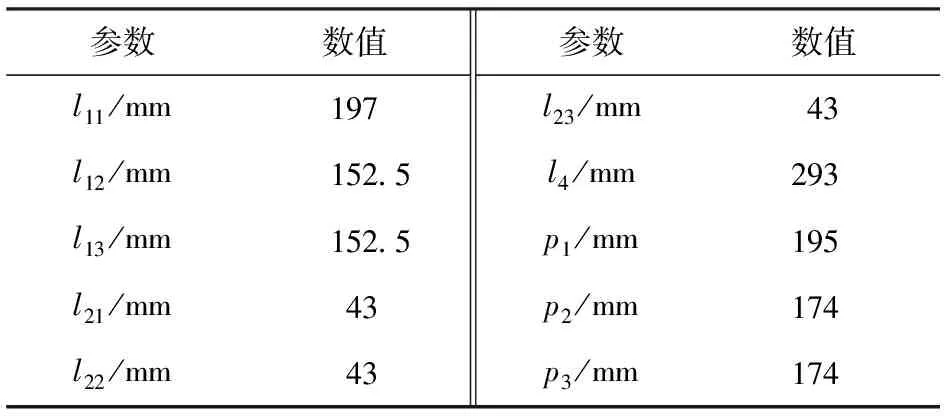
表5 试验样机的设计参数
首先验证3.2节表4中位置正解的试验与理论误差。通过电动推杆驱动动平台达到算例1~3的指定位姿,如图17~图19所示,由于算例3第3卦限正解的γ转角超出样机的的极限位置,故该位姿不做验证,结果如表6所示。

图17 算例1的验证Fig.17 Verification of example 1
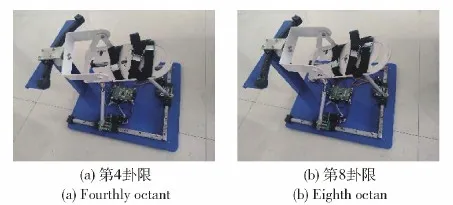
图18 算例2的验证Fig.18 Verification of example 2

图19 算例3的验证Fig.19 Verification of example 3

表6 位置正解验证
不失一般性,给动平台任一指定两个位姿,如图20所示。图20(a)中,动平台绕动坐标系原点Od的x′轴、y′轴、z′轴依次转动20°、10°和5°,代入式(10)求得p1、p2、p3分别为206.18 mm、205.85 mm和174.96 mm,通过电动推杆驱动动平台达到指定位姿,在该位姿下实测p1、p2、p3的值分别为204 mm,207 mm和170 mm;图20(b)中,动平台绕动坐标系原点Od的x′轴、y′轴、z′轴依次转动0°、-5°和-20°,代入式(10)求得p1、p2、p3分别为194.34 mm、153.50 mm和206.44 mm,在该位姿下实测p1、p2、p3的值分别为191 mm、153 mm和202 mm。

图20 两个指定位姿Fig.20 Two specified poses
以上7组数据中,实测值与理论值的误差范围为0.33%~2.83%,考虑到零件的装配间隙和测量误差,认为该结果是可信的,即本文所提出的位置正/解的求解方法是正确的。
通过尼龙带将足部固定在动平台上,如图21所示,验证3-PRPS/RRR踝关节康复机构工作空间。试验人员尽量转动足部,带动动平台进行跖屈/背屈、外展/内收、内翻/外翻和复合运动。在试验人员足部进行各种运动时,机构均能随足部运动,表明机构的工作空间满足人体踝关节的运动范围。

图21 工作空间试验Fig.21 Workspace experiment
机构在跟随试验人员足部运动时,编码器记录此过程中各个电动推杆的伸缩量,再通过离线编程的方式复现此运动。在机构复现运动时,电动推杆的伸缩量变化如图22所示,动平台运动角度变化如图23所示。由图22~图23可知,机构运动平稳,速度无突变和卡滞现象,表明3-PRPS/RRR踝关节康复机构在工作空间内无奇异位形,运动性能优良,能够带动足部进行康复运动训练。

图22 电动推杆伸缩量变化Fig.22 Variation of the stroke of the linear actuator

图23 动平台角度变化Fig.23 Variation of the angle of the moving platform
8 结论
本文提出一种具有3转动自由度的3-PRPS/RRR踝关节康复机构,且机构的转动中心与踝关节转动中心重合。得到如下主要结论:
1) 通过闭环矢量法得到机构的位置逆解,使用PSO算法解算能够机构的位置正解,通过CAD模型与计算结果对比可知PSO算法参数选择是合理的,位置正解算法是正确的。
2) 给出一组机构参数,采用数值迭代的方法得到机构的工作空间,且满足踝关节康复训练的运动范围,通过推导出机构的雅克比矩阵,计算机构在其工作空间内不存在奇异位形,表明机构的运动性能良好。本文研究的机构能够应用于踝关节康复训练。
3) 仿真结果表明,在康复训练时,肌肉激活度随着阻尼的增加而增大,表明使用该机构进行康复训练是有效的。所建立的坐姿下踝关节康复机构-人体骨肌耦合系统为该机构对真实病人的康复效果提供参考,能够为患者踝关节康复提供更精准的康复指导。
4) 搭建试验样机,给定7组位姿的试验验证了位置正/逆解求解方法的正确性;通过足部运动验证了样机的工作空间满足人体足部运动范围;利用离线编程,使电动推杆驱动动平台运动,表明机构无奇异位形,运动学性能优良。