肢体功能障碍患者应用下肢康复机器人体验的质性研究
2023-11-27毕轩懿闫妍王莹吴爱荣叶旭春
毕轩懿,闫妍,王莹,吴爱荣,叶旭春
(1.海军军医大学 护理系,上海 200433;2.上海市第一康复医院 护理部,上海 200090;3.上海市养志康复医院 脊髓损伤康复科,上海 201619)
全球有超过16%的人口罹患不同程度残疾[1]。在我国,残疾人总数已高达8500万人,其中肢体残疾人数占比最大(29.1%)[2]。肢体功能障碍是指肢体行动无法完全受思维控制,是肢体残疾的主要类型,多由神经系统损伤、意外创伤等所致,给家庭、医院及社会带来沉重的照护负担[3]。下肢康复机器人是近年来较为先进的康复工具,能提供标准化、精准化的康复训练,促进患者早期站立和步态重建,提高康复训练效果[4-5]。了解目标用户的应用体验将有助于挖掘其对下肢康复机器人可用性和使用效果的真实评价,并根据其意见进行必要迭代更新,以开发出满足用户需求的机器人产品。然而,国内康复机器人的研发起步较晚,且多为基础技术的探索或应用效果的评估[6-7],鲜有研究基于目标用户视角探索应用体验。鉴于此,本研究采用质性研究方法,深入了解肢体功能障碍患者使用下肢康复机器人的真实体验,为康复护理的数字化转型提供实践依据。
1 对象与方法
1.1 研究对象 采用目的抽样法,选取2022年1—9月上海市某2所康复专科医院的肢体功能障碍患者为访谈对象。纳入标准:(1)因神经系统疾病所致的下肢功能障碍患者;(2)接受过机器人辅助康复训练;(3)年龄≥18周岁;(4)知情同意,自愿参与本研究者。排除标准:(1)有认知功能障碍或精神疾病;(2)合并恶性肿瘤、心功能不全等严重疾病。本研究经过医院相关部门批准(2020-GZR-HS-003),采用最大差异抽样策略选取访谈对象,充分考虑性别、年龄、疾病类型等。在患者完成机器人康复任务后,进行面对面深度访谈,样本量确定以信息达到饱和为标准[8]。本研究共纳入12例患者,一般资料见表1,编号为P1~P12。
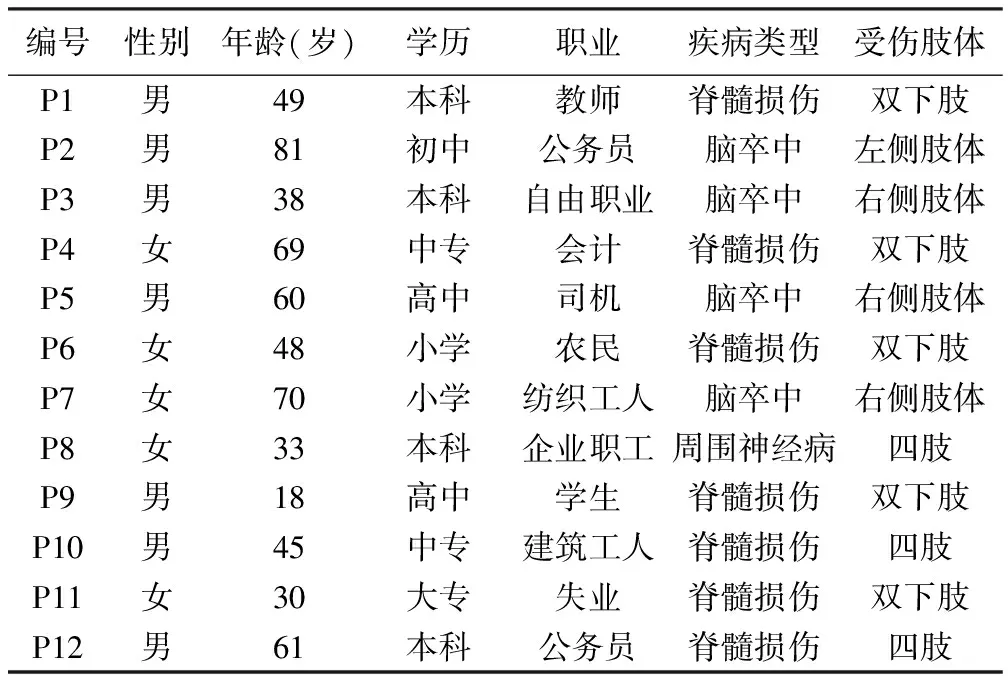
表1 受访者一般资料(n=12)
1.2 研究方法
1.2.1 确定访谈提纲 根据研究目的,在文献回顾基础上初步拟定访谈提纲,咨询2名康复护理领域专家并预访谈2名患者后形成正式版访谈提纲。访谈提纲包括:(1)您最初为什么会选择机器人来进行步态训练呢?(2)第一次使用机器人进行功能锻炼时,您是什么感受?(3)您在使用机器人的整体感受怎么样?(4)您认为机器人对您有哪些方面的效果吗?(5)您在使用机器人时担心会出现什么问题?
1.2.2 资料收集方法 研究者以实习生身份进入康复治疗中心学习,访谈前与受访者建立良好的信任关系。访谈地点选择在会议室,环境安静且不受干扰。访谈开始前,向受访者介绍研究目的、意义及方法,承诺访谈资料将严格保密且仅用于研究,签署知情同意书。访谈过程中,按照访谈提纲从宽泛性问题开始,合理应用反问、回应、澄清等访谈技巧,逐步推进问题并避免诱导性问题,仔细观察并记录受访者表情行为、肢体动作等。每次访谈约25~40 min,访谈过程全程录音。
1.2.3 资料分析方法 使用Nvivo 12.0软件进行资料整理和归纳,并采用Colaizzi 7步分析法[9]进行主题分析。
2 结果
2.1 主题一:内心反复纠结
2.1.1 好奇与担忧交织下的矛盾 当亲眼看到他人使用下肢康复机器人时,患者充满着强烈的好奇心和新鲜感,并想要在后续治疗中尝试。P5:“机器人是我在到处转的时候发现的,觉得挺有意思的,就想试试自己能不能走。”同时,源于对运行模式和预期效果的未知,患者容易产生不确定感,主要体现在怀疑、恐惧等情绪的表露。P1:“刚看到别人在用机器人,是觉得很新鲜的,但更多的还是害怕,因为不知道它带我走路的感觉到底怎么样。”
2.1.2 权衡风险与收益时的纠结 患者存在着明显的心理冲突,即反复衡量风险与收益间的平衡性,纠结高昂的治疗费用和大量的时间、精力付出是否能带来预期的康复效果,因而犹豫是否要在后续治疗中继续使用。P6:“要说机器人好吧,又不是神灵,现在还没看到什么效果;说它不好吧,站上去还挺舒服。就是不知道花了这么多钱、这么多时间有没有用。”
2.2 主题二:初始尝试时的喜悦与失落
2.2.1 重新站立的喜悦 在下肢康复机器人辅助下,患者在患病后首次体验到双脚落地的感觉,拥有重新站立或行走的宝贵机会,从中体会到喜悦、兴奋、愉悦等,进而增强康复信心。P4:“第一次刚用机器人时候是很开心的,就好像自己真的能站起来走路了一样,不管怎么说最起码站起来了。”
2.2.2 预期偏差的失落 在使用下肢康复机器人前,患者抱有很高的期待,认为这会是一次极佳的应用体验。然而,在真正使用后,患者发现过紧的固定绑带、程序化的步态模式,以及红肿、过敏、擦伤等生理不适反应,导致其应用体验未能达到预期,产生心理落差。P8:“机器人后面不是有个绑带嘛,可能因为我比较胖,总感觉有点紧。”P11:“站起来跟我想象中不一样,我以为能正常走路,但是并没有那么轻松,很板正,像是机器人在走路。”
2.2.3 运动过量的不适 患者在患病或受伤后多丧失基本活动能力,身体素质和活动耐力下降,而超负荷的康复训练任务导致其出现体力不支、虚弱无力等症状。P3:“刚开始练习走路的时候还是很累的,抬腿往前走非常沉重,每迈一步都要花很大力气,身体吃不消。”
2.3 主题三:坚持锻炼后的身心获益
2.3.1 步态重建的自豪 患者运动相关的深度肌肉记忆被唤醒,逐渐回忆起相对真实而彻底的步行记忆。P12:“就觉得自己是正常人了,能站起来走路了,找回了以前的感觉。”在此过程中,患者感受到原先的错误步态被矫正,逐渐习惯和建立正确的步态模式,从中获得自豪感。P6:“机器人带我走路,让我感觉走得更正派了一点,不像自己走得那么别扭了,有时候还挺自豪的呢。”
2.3.2 功能增强的满足 患者感觉到全身机体功能的不断恢复,逐渐恢复至患病或受伤前的生理状态,并增强肌肉力量和运动功能。P9:“刚开始走的时候我总是满头大汗的,现在好多了,腿上的肌肉都比以前胖了一圈了。”患者还提出自身血液循环和呼吸功能得到改善,以及对糖尿病、高血压等慢性病的自我调适能力得到增强。P6:“我之前吸气、吐气的节奏很奇怪,但用机器人就好多了,可能是在走路了,血糖也是,感觉又能行了。”
2.3.3 直立平视的体面 在下肢康复机器人的辅助下,患者实现重新下地行走的可能性,并能以直立行走的姿势与他人站在同一水平线上面对面交流,有效提升其自尊心。P9:“机器人帮着我站起来,这样我就能平视别人了,不用像以前一样仰着头跟别人说话了。”此外,患者还逐渐增强对人生价值的自我认同,并对生命意义有了全新的认识和感悟。P4:“我现在站起来了,又能走路了,好像我又有点用了。”
2.3.4 获得支持的放松 下肢康复机器人多由牢固复杂的钢性结构组成,附加大腿、小腿等多条弹性绑带的连接和保护,患者从中体验到充足的安全感。P7:“这个机器人都是铁的框架,我不用担心摔跤,比老师带着我走安全多了。”患者还提出治疗师和照顾者的全程在场也使其感觉到放松和安全。P2:“不担心出现什么问题,因为医生一直在旁边看着,我家里人也在这,感觉很放松。”
2.3.5 燃起康复的热情 通过全身心地参与到下肢康复机器人康复训练,患者重新看到能下地走路的希望,充分调动参加康复训练的热情和积极性。P5:“好像是重新看到了生命的希望,这么多年的求生欲都像要爆发出来了,我又开始相信生活了。”
2.4 主题四:体验不良时的烦躁与恐惧
2.4.1 穿脱繁琐时的烦躁 下肢康复机器人多体积庞大,尽管能在一定程度上保障患者安全,但固定绑带的调节和系统参数的设置需要消耗大量的时间和精力,在此过程中患者会出现烦躁和不安的情绪。P11:“这个机器人穿起来很麻烦,每次穿它都要花很长时间,我真正去走的时候都很短,那还不如直接做手法了。”
2.4.2 缺乏主动控制时的无措 现有下肢康复机器人多为被动模式,完全代替患者肢体运动,但患者会缺乏对治疗过程和康复进展的控制感,感到被机器人控制,出现迷茫、无措、慌乱等情绪。P10:“感觉自己是被机器人带着走的,我只是被绑在上面,我又控制不了它。”也有患者尝试使用主动模式,但仍存在一些交互设计问题,如主被动模式差异不明显、因步长不一致而出现故障等。P12:“我用主动模式就会卡住,因为我自己走嘛,肯定步子不稳定,只要我不按照它的节奏走,就会卡住。”
2.4.3 遭遇非预期事件时的恐惧 患者提到曾经遭遇过可能会再次威胁其生命健康的非预期事件,如下肢康复机器人发生卡顿、失去控制等,诱发对既往受伤经历的痛苦回忆,进而产生不信任与抗拒心理。P11:“有一次机器人突然把我的左腿弹了起来,当时把我和我妈吓死了,从那以后,我都有点阴影了。”
2.4.4 康复效果欠佳时的失望 由于康复进展的缓慢和效果的不显著,患者认为与心理预期仍存在一定的现实差距,因而表现出失望、沮丧、挫败等情绪。P3:“要长时间锻炼才能看到一点点效果,现在来说进步不大。”P7:“之前还以为是用了机器人以后很快就能走路了,但进步不太大,还跟以前差不多。”
3 讨论
尽管患者在初次接触下肢康复机器人时的反应各异,既有好奇喜悦,也有纠结不适,但坚持锻炼后普遍认可其临床价值,这与Chang等[10]、王开等[11]的研究结果一致。然而,下肢康复机器人也对康复护理事业的发展形成严峻挑战,未来仍需从人、机、任务、环境等层面进行优化。
3.1 关注用户体验,提供信息支持 本研究发现,患者尤其是老年患者对新技术表现出明显的恐惧和抵触,亦存在着付出与收益不平衡的冲突心理。周玉兰等[12]也发现,老年患者受文化程度、认知能力、技术使用经验等多重因素的影响,普遍难以接纳人工智能、机器人等技术。因此,应加强信息支持,通过实地演示、免费试用、专业讲座等方式向患者充分介绍下肢康复机器人的康复作用和优势,消除其消极顾虑并鼓励主动参与。
3.2 优化功能设计,加强安全康复 患者感受到不良结构设计所致的不适体验,如程序化的步态模式、缺乏主动控制感等。现有下肢康复机器人仍处于发展阶段,安全性、舒适性等人机交互设计存在不足,较低的技术成熟度难以满足患者多样化康复护理需求[13],也无法及时预测并发现安全隐患[14]。因此,应重点关注患者的应用体验,尤其是负性体验。鼓励患者提出功能需求和优化建议,并实时采集和分析患者的身心指标,及时识别异常运动姿势或跌倒趋势,在第一时间发出警报和反馈,避免不良事件的发生。
3.3 规范临床程序,构建康复方案 患者认为过量的运动强度、繁琐的穿戴过程等因素也会导致其产生疲乏、烦躁等负性情绪。国内外康复机器人研究多为以随机对照试验为主的临床研究,鲜有研究构建机器人康复的训练方案[15]。因此,应根据不同疾病类型和机器人功能分类,充分考虑患者的生理、心理和社会等特征,借鉴国内外机器人康复护理指南、证据总结,制定基于循证的、具有针对性的、可动态调整的机器人康复训练方案。
3.4 加强外部支持,完善资源配置 我国康复机器人主要应用于医疗或康复机构,患者遇到困难可直接向医护人员和家属求助[16]。来自照顾者和医护人员的外部支持会使患者感觉到放松和安全,增强康复依从性和专注力。因此,应提供有温度的康复护理服务,协同照顾者给予全阶段、立体化的技术指导,保障患者能及时得到帮助和反馈。此外,笨重、制造成本高的钢性结构在加重患者体力负荷的同时,也进一步加重了照顾负担。然而,受限于费用昂贵、未纳入医疗保险等,机器人康复难以向社区端、家庭端普及应用[17]。因此,应通过纳入医保范畴、租赁服务等惠民措施推动更多延续性康复护理资源向社区和家庭端倾斜,助力机器人康复向更深层次的推广。
4 小结
本研究通过对肢体功能障碍患者使用下肢康复机器人的半结构式访谈,共提炼出4个主题。研究结果提示患者表现出明显纠结,仍应从人、机、任务、环境等视角全方位地优化和完善。但本研究仅基于患者视角,后续研究可从利益相关者的视角进一步丰富研究结果,为助力康复护理事业的高质量发展提供参考。
