一种远程可控式仿生螃蟹机器人
2023-11-27梁广南LIANGGuangnan何伟HEWei张馨月ZHANGXinyue蒋柏林JIANGBolin楚雪莉CHUXueli周桂宇ZHOUGuiyu
梁广南 LIANG Guang-nan;何伟 HE Wei;张馨月 ZHANG Xin-yue;蒋柏林 JIANG Bo-lin;楚雪莉 CHU Xue-li;周桂宇 ZHOU Gui-yu
(宜宾学院,宜宾 644000)
0 引言
仿生机器人为21 世纪初机械科学发展的一个重要方向。目前,在机器人研究领域,应用仿生学原理,模仿生物的结构特性、从事适合生物特点工作的仿生机器人的研究极具发展潜力,而多足仿生机器人则成为其研究的一个热点。但是在设计上也有一定的缺点:作为一款灵活移动机器人,却无法做到灵活的转动,在仿生螃蟹的基础上没有改善其无法灵活转动的缺点;在作用上功能比较单一;运行的稳定性不强;蟹钳不能够灵活夹取物品;控制功能不完善等设计缺点。(图1)
本发明提供了一种仿生螃蟹机器人:由WiFi 实现了远程控制,可以代替人工进行取物,同时钳子可以进行模块替换以实现不同的功能,如穿插、挖掘等。在满足基本使用需求后,模块化的接口设计能够更有效提高机器人的一体性。
1 基本设计方案
本次设计的仿生螃蟹清洁机器人是通过电机连接齿轮带动链条发力带动曲柄摇杆机构使其整体开始运动,并采用ROBO PRO 编程,能够实现蓝牙控制、遥控控制。此设计共采用7 个电机,3 个限位开关,1 个光敏传感器。底盘两个电机分别带动左右两个曲柄摇杆运动;遇到垃圾物品时通过连接机械臂大臂的电机控制机械臂整体的升降(此处有两个限位开关,方位机械臂运动过位,损伤机械臂),再通过控制机械臂的机械爪抓取物品,升起机械臂时触碰限位开关,立即将物品丢入顶部的垃圾筐中。再控制垃圾筐下方连接的涡轮机构控制垃圾筐的升降。
1.1 机器人基本结构
该仿生螃蟹机器人包括:行走驱动部分,装载部分,导向部分,夹取部分,信息接收和发送部分,传感器部分,摄像头模组,控制部分和电源部分。
①装载篮。
本设计利用丝杠传动从而带动倾斜台,控制改变载物篮的倾斜度来进行翻倒,且结构紧凑,易于控制,又因为增加了限位开关,可以限制位置以保证设备安全。
②摇杆机构。
本设计运动部分采用Ⅲ级杆组的闭链五杆机构,消除传统仿生机械的多自由度,保留一个自由度,运行状态稳定,驱动简单,易于控制。其运动副为低副,低副两运动副元素为面接触,压强较小,故可承受较大的载荷,且有利于润滑,磨损较小;另外其运动副的几何形状较简单,便于加工制造;在连杆机构中,当原动件的运动规律不变可用改变各构件的相对长度来使从动件中得到不同的运动规律,可以用来达到扩大行程和实现远距离传动等目的。
③机械臂。
关节式机械臂是一种适用于靠近机体操作的传动形式。可实现多个自由度,动作比较灵活,适于在狭窄空间工作。通过电机齿轮控制机械臂的起降,同时控制更加便捷。
1.2 工作过程
行走驱动:在控制面板上点击“前”键,两侧腿部处电机19 正转,通过齿轮链条16、17、18 将动力传递到腿部大齿轮13 上,同侧腿再通过大齿轮的齿轮链条13、14、15 啮合以达到同侧同步运动,再通过腿部曲柄摇杆机构,将齿轮转动转化为腿部摆动,以达到爬行行走。反之,点击控制面板上“后”键,电机19 反转,将动力通过齿轮链条17、18、19 传递到腿部大齿轮13 上,同侧腿也通过大齿轮的齿轮链条13、14、15 以达到两侧同步运动。当装置正处于前或后的运动状态时,点击控制面板上的“停”键,使电机19 停止转动,以停止驱动电机来停止行走。同时在移动过程中,可通过蓝牙遥控器控制蓝牙模块连接的导向轮21上的舵机20,实现移动过程中的左转右转。结构如图2、图3 所示。
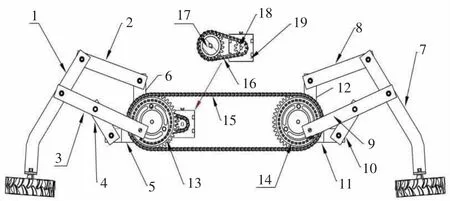
图2 轮腿部分结构图解

图3 导向部分结构图解
①由杆1、杆2、杆3、杆4、杆5、杆6 构成一组曲柄摇杆机构。
②由杆7、杆8、杆9、杆10、杆11、杆12 构成一组曲柄摇杆机构。
③各杆连接处内部均有轴承保证其转动良好,两两连杆直接通过铰制孔用螺栓连接保证其稳定性。
夹取机械臂:在控制面板上点击“钳子”,(初始状态默认为钳子闭合,钳子由电机22 驱动),电机22 正转,丝杠24 转动,钳子滑块23 向前移动,带动钳子25 张开,待张开到需要的大小后,点击“停钳”,电机22 停止,丝杠24 停止转动,钳子25 停止张开并锁定开口大小。待控制装置移动到待夹取物时(通过控制面板上摄像头反馈画面观察,物体到钳子张口中心),再次点击控制面板上的“钳子”,使电机36 反转,丝杠24 反向转动,钳子滑块23 向后移动,带动钳子25 闭合,待夹住物体后,点击“停钳”,使电机22停转,钳子停止闭合并锁定开口大小。再点击控制面板上“臂”,电机32 正转、电机30 反转,再通过齿轮27 传动,带动小臂29 抬起,同时电机36 正转,通过滚轮将线收束,使大臂26 抬起,待夹取物体的钳子到达装载篮后,点击“停臂”,使电机36、30、32 停止转动。之后再点击“钳子”,使电机22 正转,丝杠24 转动,钳子滑块23 向前移动,带动钳子25 张开,待物体落入装载篮后,点击“停钳”,电机22 停转,钳子25 停止张开并锁定开口大小。再次点击“臂”,电机32 反转、电机30 正转,再通过齿轮27 传动,使小臂29抬高,待延时两秒后,电机34 反转,通过滚轮34、35 反转释放线,又因为重力作用,臂自然放下,待大臂落至限位开关31 处时,触发后,电机36 停转,防止滚轮不停转动,将大臂26 重新拉上去。最后通过摄像头观察,待钳子回到初始位置,点击“停臂”,停止电机32、30 的转动。结构如图4所示。

图4 夹取部分结构图解
装载篮倾倒与回位:待装载篮37 装满收集物品(垃圾)后,点击控制面板上“装载篮”键,电机40 正转,带动丝杠39 转动,使装载篮滑块38 向前移动(此处前为装载篮开口方向),使装载篮转动连接出42 倾角增大,通过滑块38 不断移动,待到达极限位置,电机M1停转,丝杠也停止转动,装载篮滑块38 停止移动并被丝杠39 锁死。之后再次点击“装载篮”,电机40 反转,丝杠反向转动,带动装载篮滑块向后移动,待移动到另一极限位置(此处极限位置为装载篮滑块初始位置)后,电机40 停转,丝杠39 也停止转动,由此回到初始装载篮37 位置。结构如图5 所示。

图5 装载部分结构图解
夜间照明:在外界光照强度高时,光电传感器I3接收信号,照明灯O3、O4停止运作(熄灭),当外界光照强度下降时,光电传感器I3接收信号,照明灯O3、O4开始工作(亮起)。
1.3 动力学分析
通过前面三步对机构模型的建立以及分析,可以使用回放功能对分析结果进行回放,检查干涉,查看测量和动态测量,获取轨迹曲线和运动包络线以及创建转移到Mechanica,有利于设计者了解机构的设计合理性、可行性等工程分析。在丝杠旋转带动滑块平移的过程中,丝杠前端会承受压力,同时丝杠螺旋线上表面会受到载荷。将丝杠材料定义为结构钢,在旋转过程中受到5N 方向轴向的压力,最后通过受力分析可靠性。
2 软件控制
行走驱动控制:在控制台上(电脑)点“前”“后”可对机器人发送前进后退指令,通过EM1上M3M4电机正转反转实现,点击“停”可让EM1上M3M4电机停止,从而使之前的前后运动过程停止。
夹取控制:点击控制台(电脑)的“钳子”键,可使钳子电机M3正转,从而钳子张开,再点击“停钳”,使正转停止。待钳子运动到指定位置,再次点击“钳子”键,使钳子电机M3反转,钳口收缩,直至夹住物体,再点击“停钳”,停止电机M3反转。
机械臂控制:点击控制台(电脑)的“臂”键,使M4正转,使机械臂大臂抬起至I4,触发I4,使EM1上M1正转M2反转,使机械臂小臂抬起,待钳子到达载物篮后,点击“停臂”,使机械臂向上运动停止。再点击“臂”键,使EM1上M1反转M2正转,机械臂小臂放下,延时两秒后,M4反转,直至触发I5,机械臂下放动作停止。
载物篮控制:点击控制台(电脑)上“载物篮”键,M1正转,载物篮抬起,倒出载物篮中物体,到达I1后,触发I1,M1正转停止。再点击“载物篮”,M1反转,载物篮放下,直至到达I2,触发I2,载物篮回归原位。
夜间照明:当外界环境为白天时,I3光电传感器不触发,照明灯O3O4不亮,当外界环境为夜晚时,I3光电传感器触发,照明灯O3O4长亮。
3 本设计技术优势
①实现远程控制,突破环境对人们行动的限制,使其使用更加便民化、便捷化,在10 米范围内可实现远程控制。②可实现自动感光开启或关闭LED 灯,更加契合资源最大化利用、保护环境的要求,当光照强度低于333Lx 可自动开启夜间照明模式。③能实现垃圾一键夹取、倾倒功能,使其操作更加便捷。④仿生螃蟹的独特运动方式,让其不受环境的约束,同时能够在平地、草地、沙地等特殊场地进行作业。
