基于GPS技术的水稻精准种植机械设计与实现
2023-11-24边海生
边海生
(方正县农业技术推广中心,黑龙江 方正 150800)
0 引言
随着世界人口的增加,对食物的需求量也在增加,食品安全问题日益受到重视。水稻作为世界上最大的粮食作物,在农业生产中占有重要地位。为满足日益增长的食物需求,如何提高农作物产量是当前亟待解决的问题。在此背景下,对水稻播种机的研究与开发越来越重视[1-3]。水稻种植机械是农业生产的核心装备,在农业生产中发挥着举足轻重的作用。但是,目前水稻播种机械在我国的推广应用还面临着播种精度不高,作业效率低,设备结构复杂,能耗大,对环境的影响大等问题。针对上述问题,对其进行优化设计,对于促进我国水稻播种机技术的创新与发展具有重要意义[4-7]。
当前,精准农业已经成为我国农业发展的趋势。精准农业覆盖很多领域,例如采用传感器、互联网和GPS定位技术实现精准变量播种和施肥。所以,研制一套水稻播种机监控系统,可以提高播种质量。在播种机定位方面,国外主要采用 GPS定位技术来监测播种机的位置。约翰迪尔公司的AutoTrae全自动导航系统,以绿色星32630显示屏监控种苗位置,并使用了星火6000接收机和SF3讯号,其准确度达到2.5 cm,具有4~5倍的高效能。美国精密播种公司生产的20/20SeedSense,不但可以准确地定位种子的位置,还可以准确地判断漏播面积,同时还可以检测出土壤水分、温度,以及镇压情况[8-11]。石河子大学实现了对播报信息的实时监控,并利用报警灯光和蜂鸣器对漏播情况进行实时预警,以便驾驶人员能够在最短时间内作出正确的应对[12]。吉林大学利用GPS和GPRS技术,对种子进行了实时监控[13]。河南理工大学利用GPS定位技术,对其进行了精确的分割施肥[14]。目前,我国的相关研究多是针对种子的漏播、重播等情况,而针对结合GPS的水稻种子的位置监测研究较少。
本文设计了一种基于GPS技术的水稻精准种植机械,主要包含播种机械的关键部件,以及通过两套光电传感器和GPS的组合,完成了种子种植位置的推算,并将推算结果及漏播和重播区域等其他播种操作信息显示在云端平台上,并进行田间试验。
1 水稻精准种植机械关键部件设计
1.1 种子箱
本研究以龙粳31为水稻品种,进行播种试验。研究了水稻在不同含水率条件下,滑动摩擦角范围为20°~40°,并以此为依据,考虑种箱内摩擦力和下滑力的关系,如图1所示。其最佳的θ角为60°,且种槽底部呈一特定的斜角,方便种子直接进入型孔中。此外,在种子盒底部装有一个挡板,用来调整播种量。
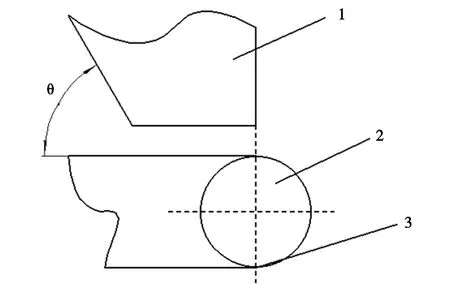
1. 种子箱;2.从动带轮;3.充种带图1 种植机械机构图
1.2 锥型孔
锥型孔的设计参数是种植机械的中心,它的设计参数对种子填充质量有直接影响[15]。带状排种器的特点是能使填充距离增大,能更好地满足锥型孔对精密填充的技术指标的要求。在此基础上,以龙粳31水稻种子为材料,对水稻种子进行了物理性状测试,获得了水稻种子的平均三轴度:长7.54 mm、宽3 mm、高2.4 mm。最大休止角和最大滑动角分别为49°和26°。清种后,2~3粒种子留在型孔内,实现了精确播种。
1.3 充种带
为方便监测,避免因打滑而造成的漏播,充种皮带由同步皮带组成,其宽度为25 mm,根据皮带轮数及设计要求而定。由于同步皮带太细,只能满足输送要求,不能形成大到足以填充种子的型孔。因此,为了制造出型孔,还需要在胶带上涂上一层软橡胶材料。皮带长度为370 mm,两列37个小孔。同步皮带的每个孔径都是2 mm,便于检验,而且不会有种子泄漏出来。
1.4 护种装置
水稻在直播作业时,一般都会露出白色的芽种,相对来说,它更容易受到伤害[15-17]。因此,播种时需安装护种设备,降低种子的损伤概率。常规护种设备在护种时,种子滑落过程与护种设备接触容易产生摩擦。因此,在种植机械中加入护种装置,护种装置上面有护种带,它是由主动带轮驱动实现作业。此外,护种带上面涂有柔性材料,能够降低种子的接触损伤,同时也能降低摩擦,有效保证播种精度。

1.护种带;2.主动带轮;3.护种带轮图2 护种装置
2 基于GPS技术的种植机械系统设计
2.1 系统设计
在上述研究的基础上,本文提出了一种基于云计算的水稻种植机械系统,如图3所示。其中,利用光电传感器对播种过程进行实时监控,实现了漏播指数、重播指数、合格指数和播种位置的实时监控。在采集到各传感器的数据后,通过CAN总线对数据进行处理和分析,并将数据发送给车载终端,最后将数据上传至云端。水稻种子的位置主要是利用两套光电传感器和GPS的定位来计算水稻种子的位置,并把计算结果显示在云平台上,系统界面中地图上也会显示出漏播种子的面积。
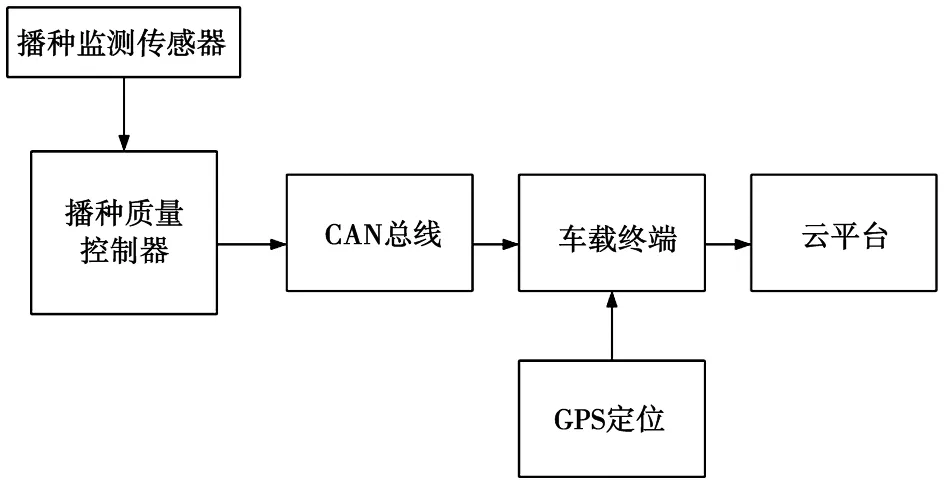
图3 水稻播种位置监测系统原理图
2.2 播种位置监测原理
为了确定播种的具体位置,以地面分界线为原点,建立了一套平面坐标系统,如图4所示。对各种子点的定位进行了计算,得到了各水稻种子点的X和Y方向的偏移量。在播种管中,安装了两套光电传感装置,传感装置A与种子管口相距200 mm,传感装置B与种子管口之间的距离为L。试验采用了改变排种盘转速的方法,来模拟种植机械的行驶速度过程。当水稻种子从排种管中流出的时候,就会启动高速摄像,对其进行拍摄,并记录下水稻种子的排种轨迹,并计算出种子从排种管中流出的速度和两个传感器间的平均速度。

图4 种植机械坐标系
3 田间试验
为检验该系统的精确度和控制精度,于2022年6月在方正县水稻科技园区农机推广试验示范基地进行了现场测试,并采用雷沃M1204 D型牵引车作为动力装置,对该装置进行了现场测试。以龙稻31号为供试材料,利康农复合肥为供试材料,以2 hm2为地块面积。在检测播位的准确度时,将播位转化为水稻间距,因为播位处于设定好的虚拟座标中,在Y方向上基本不存在任何偏差。在设置好株距后,启动播种机,播后,随机选取15个采样点,计算已经作业位置的实际播种量与云平台中所记录的播种量进行比较。试验以当地农艺要求为依据,将作业速度设定为6 km/h,株距误差在0~2 cm范围内属于合格。试验结果显示,播种合格率可以达到95%,漏播率为3.2%,重播率为1.8%,能够满足水稻种植的需要。由于种子在落种时会出现翻滚反弹,播种机未及时制止,以及播位监控系统未进行翻滚反弹距离的计算,导致一些水稻播种量的实际值与平台记录值出现误差。
4 结论
本文结合水稻种植机械目前的研究现状,设计了一种基于GPS技术的水稻精准种植机械。对种子箱、锥型孔、充种带和护种装置进行优化参数设计,提高了播种效率。此外,通过两套光电传感器和 GPS的组合,完成了种子的种植位置的推算,并将推算结果展示在云端平台上,并将漏播和重播区域等其他播种操作信息显示在云端平台上。田间试验结果表明,播种合格率能达到95%,漏播率3.2%,重播率1.8%,满足水稻种植要求。
