收获期菊芋根-块茎离散元柔性模型研究
2023-11-23孙文涛梁子安
周 俊 孙文涛 梁子安
(南京农业大学工学院, 南京 210031)
0 引言
菊芋(HelianthustuberosusL.)是多用途植物,根系具备水土保持及土壤性质改良等功能,块茎是食品、药品及生物工程等领域的重要生物质资源[1-3]。菊芋机械化收获过程中,需要对根和块茎进行分离处理,当前菊芋机械化收获挖掘装置的结构优化和减阻等方面已有相关研究[4-5],而清选和输送等装置的研究报道较为有限。由于菊芋在清选分离过程中物料成分复杂且相互混合,难以对其在不同作业参数下的运动规律开展研究,相关装置作业参数设定缺少依据。而离散元法在非连续介质[6-9]数值模拟方面具有优势,可根据材料接触及力学等特性进行建模,并对物料与收获装置之间相互作用规律进行探究。因此,建立菊芋根-块茎模型可以为菊芋机械化收获过程中清选和输送等环节的作业参数优化研究奠定基础。
菊芋根-块茎结构复杂且在收获装置内相互混合,较难通过数学及有限元等方法实现其建模要求。而离散元法已在茎秆、根茎类物料物理特性模拟和收获装置参数优化等方面得到了较多应用[10-13]。根据前述研究,建立柔性模型可以更好地模拟物料在复杂受力条件下与其他材料相互作用而产生的弯曲、变形等力学行为。然而,目前根茎及茎秆的离散元研究主要关注其自身单一的力学特性,较少考虑与其余连接部分的相互作用。
王凤花等[14]通过对马铃薯块茎进行3D扫描建立块茎模型,可以反映收获过程中马铃薯与各材料之间的接触特性。ZHANG等[15]利用刚性茎秆及油莎豆模型,对油莎豆块茎清选过程中物料运动规律进行了探究,据此选择振动筛最优工作参数。何晓宁等[16]通过构建刚性根和块茎粘结模型,研究收获过程中油莎豆受力及位移规律,确定了起挖装置最佳组合作业参数。通过前述研究可知,目前根系及块茎模型多为离散的刚性颗粒,没有考虑物料柔性特性对试验结果的影响。
针对收获装置内菊芋根系弯曲交错、根与块茎相互连接的特点,建立一种能反映根须柔性及块茎脱落复合特性的模型,对于利用离散元法优化菊芋收获装置作业参数具有指导意义。本文以收获期菊芋根-块茎为研究对象,兼顾根须柔性及块茎脱落特性,通过离散元法建立菊芋根-块茎柔性模型,并结合物理试验对模型的基本接触参数和粘结参数进行标定,为菊芋机械化收获相关环节的作业参数设定研究提供理论模型支撑。
1 试验材料与方法
1.1 收获期菊芋根-块茎参数测定
1.1.1菊芋根-块茎本征及基本接触参数测定
为获得菊芋根-块茎模型基本物理参数,首先对菊芋根-块茎本征及接触参数进行测定,试验选用江苏地区菊芋种植园的早熟鲜食型菊芋品种。运用排水法测定块茎密度为1 184.4 kg/m3。将试验样品制成直径10 mm、长度20 mm的标准压缩材料[17-18],使用图1a所示TMS-Pro型质构仪(FTC公司,美国)进行平板单轴压缩试验,设置压缩速度为20 mm/min,加载位移为6 mm,试验重复10次,统计单轴压缩试验前后高度和直径的变化,计算得到菊芋块茎弹性模量、剪切模量和泊松比分别为5.728 MPa、2.034 MPa和0.408。

图1 菊芋本征及基本接触参数测定Fig.1 Determination of intrinsic and basic contact parameters of Jerusalem artichoke
菊芋块茎与Q235钢静摩擦因数、动摩擦因数和碰撞恢复系数通过斜面法[19-20]确定,如图1b,结果分别为0.446、0.275和0.620。菊芋根须及茎秆相关参数在前述相同试验设备及方法下进行测定,所得参数如表1所示。
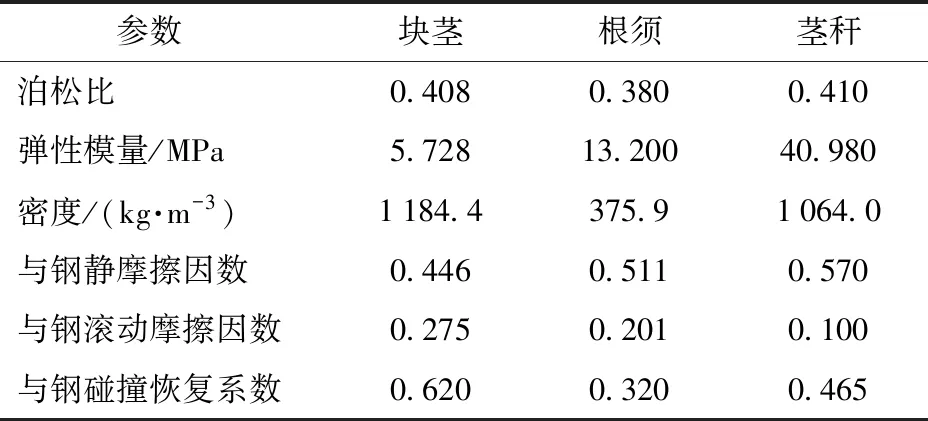
表1 仿真试验基本参数Tab.1 Basic parameters of simulation experiment
1.1.2菊芋根须弯曲弹性模量测定
菊芋根须弯曲特性可用弯曲弹性模量表示,利用三点弯曲试验[21]对其进行测量。研究中以有支撑加载方式慢速对根须段施加载荷,选取长度70 mm根须段5根,平均直径为5.5 mm,将其两端放置在水平支座上,支座两点间距为60 mm,通过质构仪从根须中心加载,加载速度为10 mm/min,加载距离10 mm。
根须弯曲弹性模量E计算公式为
(1)
式中F——加载力,N
L——两支座之间距离(标距),mm
γ——根须中点弯曲挠度,mm
I——根须横截面相对其中性轴惯性矩,mm3
根须截面近似为圆形,其惯性矩I计算公式为
(2)
式中d——根须外径,mm
根据三点弯曲试验所得力-位移曲线,采用式(1)、(2)计算可得本研究中菊芋根须弯曲弹性模量平均值为26.233 MPa。
1.1.3根-块茎抗拉力测定
经过观察,菊芋块茎多是从靠近块茎节点处脱落,试验采用拉伸法测量菊芋收获期内根-块茎抗拉力的取值范围[22],为方便夹持在不破坏节点前提下将块茎作切割处理。质构仪设置从1 N开始自动判断断裂,加载速度20 mm/min,加载距离10 mm,各节点拉伸试验重复5次。
试验结果表明:不同菊芋个体根-块茎抗拉力有所差异,试验分别测得根-块茎法向抗拉力平均为24.65 N,切向抗拉力平均为21.14 N。由于断面实际可能为一截面,其刚度较难获得,将拉伸试验过程中根须段刚度看作断面刚度,其均值为 9 443.18 N/m。 根-块茎拉伸试验中,根须自身发生断裂的情形较少,不同根须抗拉力范围为24.68~60.76 N。
1.2 菊芋根-块茎离散元柔性模型
1.2.1菊芋柔性根须模型
为模拟菊芋根须在收获装置中受力弯曲的特性,建立菊芋柔性根须模型。菊芋根须韧性较高,表皮组织薄,内部质地均匀,且收获过程中其根须一般只产生弯曲而不断裂,为简化运算,本研究基于菊芋根须弯曲特性进行研究标定,同时根颗粒选用准球形颗粒[13],半径设置为3.5 mm。
使用SolidWorks软件获得根颗粒坐标,导入EDEM元颗粒生成界面,如图2所示。由于对根须进行了放大,因此需重新确定根颗粒密度,其计算式[11]为
(3)
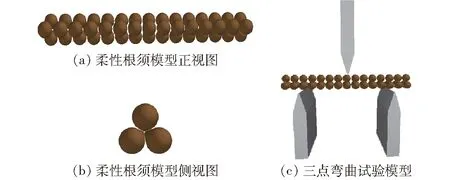
图2 菊芋柔性根须模型Fig.2 Jerusalem artichoke flexible root model
式中ρ——根颗粒密度,kg/m3
m——真实根须单位长度质量,kg/mm
l——柔性根须单元长度,mm
V——柔性根须单元体积,m3
建立刀具模型并导入EDEM进行三点弯曲仿真试验[7],以刀具为中心建立水平支座,支座两点间距为60 mm,设定刀具运动速度为10 mm/min,方向垂直向下,如图2c所示,设置仿真计算固定时间步长为1×10-6s。
1.2.2菊芋根-块茎模型及仿真试验模型
为模拟菊芋在收获装置中根须弯曲及块茎脱落的特性,建立菊芋根-块茎模型如图3a所示。

图3 菊芋根-块茎模型及仿真试验模型Fig.3 Jerusalem artichoke root-tuber and simulation experiment model
菊芋块茎形状不规则,整体呈梨形、纺锤形等。离散元法构建复杂颗粒常先采用三维建模软件获取颗粒坐标[23-24],再将其导入颗粒生成界面,如图3b所示。块茎脱落后是离散颗粒,其接触模型可以采用Hertz-Mindlin基本模型,而菊芋根须为柔性体,为对其弯曲和块茎脱落特性进行模拟,根颗粒之间须采用Hertz-Mindlin with bonding V2接触模型。将提取的各颗粒坐标导入元颗粒生成界面,最终生成菊芋根-块茎模型,仿真试验基本参数如表1所示。
对于根-块茎拉伸仿真试验,为方便颗粒生成,在菊芋根-块茎模型基础上使用球形颗粒代替块茎颗粒进行试验,如图 3c所示,夹具之间距离为70 mm,设置动夹具运动速度为20 mm/min,方向垂直向上,静夹具不动,设置仿真计算固定时间步长为1×10-6s。
1.2.3Hertz-Mindlin with bonding V2 接触模型
Hertz-Mindlin with bonding V2接触模型是EDEM在原始bonding模型基础上改良而来,配合元颗粒功能可以实现不同粒径复合颗粒的快速创建,并且计算过程兼容GPU加速功能,在农业物料研究[25]领域具有较大开发潜力。当使用该模型创建颗粒,颗粒间的相互作用在指定粘结时间以前通过Hertz-Mindlin(no slip)接触模型进行计算,达到指定粘结时间后,颗粒将通过平行粘结键粘结在一起,颗粒间力和力矩被设置为0,并逐步更新
(4)
其中
(5)
式中A——粘结键横截面积,mm2
Fn——法向粘结力,N
Ft——切向粘结力,N
Mn——法向粘结力矩,N·m
Mt——切向粘结力矩,N·m
kn——法向粘结刚度,N/m3
kt——切向粘结刚度,N/m3
vn——颗粒法向相对速度,m/s
vt——颗粒切向相对速度,m/s
ωn——颗粒法向相对角速度,rad/s
ωt——颗粒切向相对角速度,rad/s
δt——时间步长,s
J——粘结键横截面的极惯性矩,mm4
R——粘结键横截面半径,mm
r——键合对中最小颗粒半径,mm
s——粘结半径比
当颗粒间最大法向应力σmax和最大切向应力τmax超过设定临界法向应力σcritical和临界切向应力τcritical时,颗粒间的粘结键断裂,此时有
(6)
2 参数标定试验设计与结果分析
2.1 根-根颗粒粘结参数单因素试验
2.1.1单因素试验设计
粘结参数包括:接触半径、粘结半径比、法向及切向粘结刚度以及临界法向及切向应力。其中,粘结半径比可决定粘结键的横截面半径,为使根颗粒间规律粘结,根颗粒接触半径不宜选取过大,固定为5.0 mm。由于根须韧性较强,在本研究及实际收获过程中较少发生断裂,因此在本研究中只考虑根-根颗粒粘结半径比x1、根-根颗粒法向粘结刚度x2及根-根颗粒切向粘结刚度x3,分别以这3个粘结参数为试验因素设置3组单因素五水平试验,如表2所示。试验时固定因素均取水平3,即x1为4.0、x2为1.000×107N/m3、x3为1.000×107N/m3。同时,为使柔性根须在试验弯曲挠度下不发生断裂,根-根颗粒临界法向及切向应力取5×1010Pa。

表2 粘结参数灵敏度分析单因素试验设置Tab.2 Design of single-factor experiment for bonding parameters
2.1.2单因素试验结果与分析
粘结参数灵敏度试验结果如图4所示。可知当根-根颗粒粘结半径比从1.0增加到7.0,柔性根须弯曲弹性模量由2.777 MPa增加到880.810 MPa,此外随着根-根颗粒法向和切向粘结刚度从1.000×105N/m3增加到1.000×109N/m3,柔性根须弯曲弹性模量分别从1.960 MPa增加到1 099.989 MPa和从11.450 MPa增加到163.896 MPa,同时由曲线增长趋势及幅度可以看出,在设计试验水平下,根-根颗粒法向粘结刚度对根须弯曲弹性模量的影响大于根-根颗粒粘结半径比及根-根颗粒切向粘结刚度的影响。

图4 柔性根须弯曲弹性模量随粘结参数变化曲线Fig.4 Curves of flexural elastic modulus of flexible roots varied with bonding parameters
2.2 根-根颗粒粘结参数多因素试验
2.2.1多因素试验设计
粘结参数灵敏度分析表明,3个粘结参数对柔性根须弯曲弹性模量都有较大的影响,因此需要对3个粘结参数进行标定,参考单因素试验及菊芋根须实际弯曲弹性模量范围对试验水平取值范围进行压缩,设计Box-Behnken试验,试验因素编码如表3所示。

表3 Box-Behnken 试验因素编码Tab.3 Codes of factors for Box-Behnken
2.2.2多因素试验结果与分析
试验设计及结果见表4,X1、X2和X3分别为根-根颗粒粘结半径比、根-根颗粒法向粘结刚度和根-根颗粒切向粘结刚度编码值,试验指标为柔性根须弯曲弹性模量Y,并可据此建立柔性根须弯曲弹性模量与3个粘结参数的二阶回归模型。
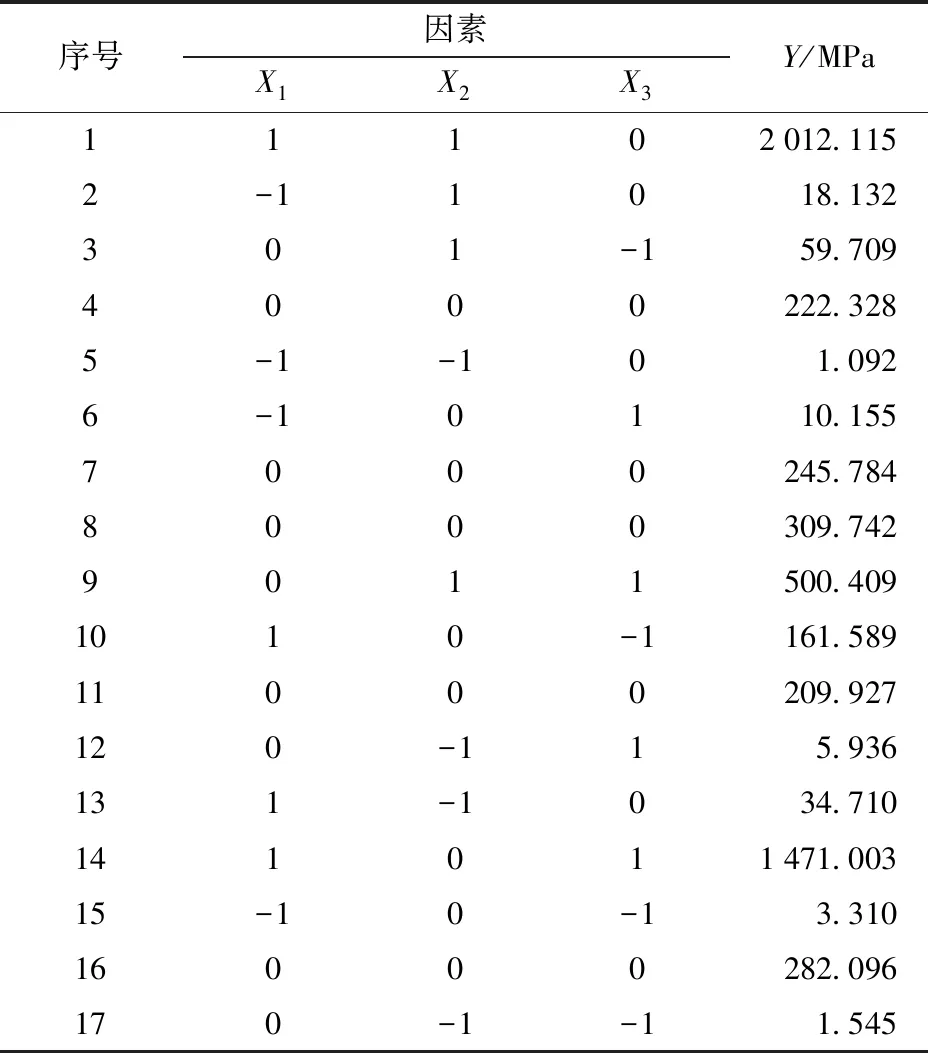
表4 Box-Behnken试验设计与结果Tab.4 Design and results of Box-Behnken experiment
本研究中所得最大和最小弯曲弹性模量之比为1 843,远大于100,因此对其进行立方根变换,得到其回归方程表达式为

(7)
对所建立的回归模型进行方差分析,结果如表5所示。
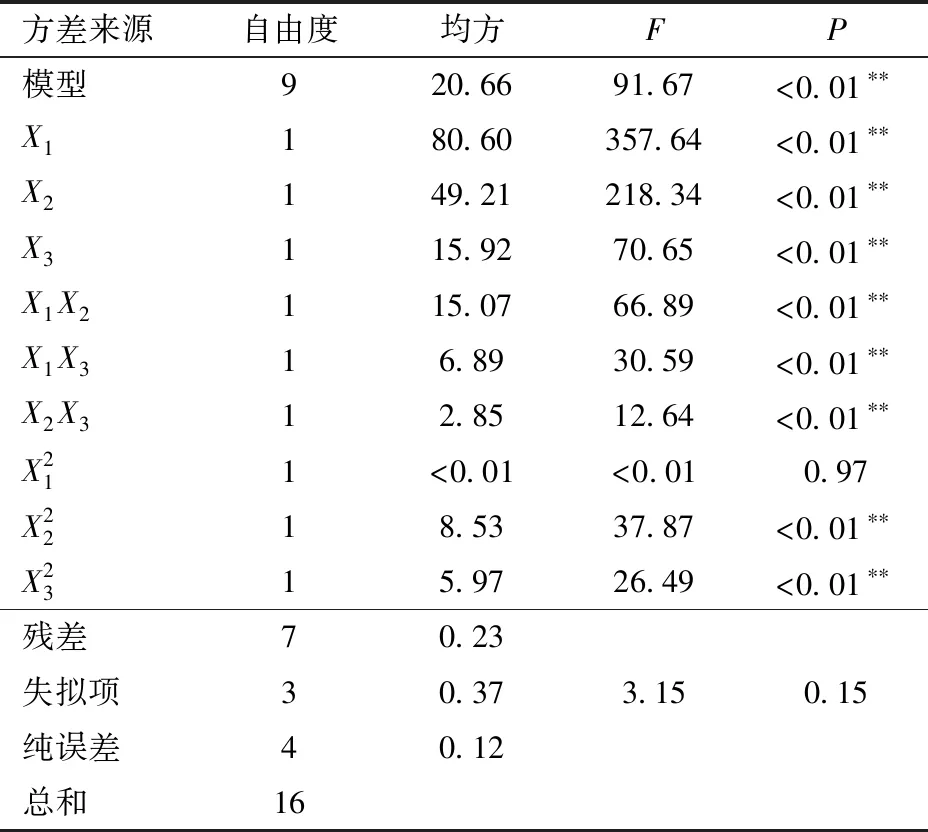
表5 方差分析Tab.5 ANOVA of quadratic polynomial model of Box-Behnken design
应用Design-Expert 12.0软件对该回归模型以最初设计点为起始点求解,当基本接触参数取值如表1所示,为使仿真结果最接近真实试验所得菊芋根须弯曲弹性模量,确定3个粘结参数最佳组合:根-根颗粒粘结半径比为1.2,根-根颗粒法向粘结刚度为9.063×107N/m3,根-根颗粒切向粘结刚度为4.078×107N/m3。
2.3 根-块茎颗粒粘结参数试验设计及分析
由于筛分过程中物料接触作用复杂,较难对根-块茎颗粒之间粘结参数进行准确标定,在1.2.3节基础上设计滚筒筛分仿真试验,对根-块茎粘结键受力及力矩进行分析。
按照表1及2.2.2节粘结参数构建菊芋根-块茎模型,其中,根-块茎颗粒临界法向及切向应力取5×1010Pa。由于喂入量较少,筛内物料提升抛落作用主要依靠金属筛体作用于菊芋根茎及块茎的支持及摩擦力[26],仿真试验其他接触参数须使得筛内物料运动形式符合滚筒筛分规律,由于菊芋块茎及根系之间仿真接触参数研究较少,因此本研究参考研究对象与试验物料物理特性相近的文献[23,27-29]设置相关参数,如表6所示。试验过程中,一次性生成12个菊芋根-块茎模型,滚筒筛转速分别设为15、17、19、21、23 r/min,如图3d所示。利用式(6)计算并统计各时刻根-块茎颗粒间粘结键力及力矩所产生最大应力,各平均值如图5所示。
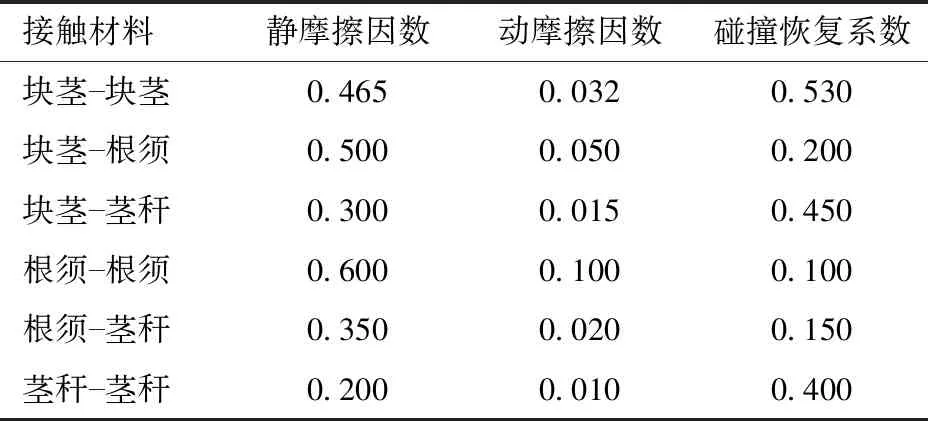
表6 块茎脱落仿真试验接触参数Tab.6 Contact parameters of simulation experiment of tuber shedding

表7 菊芋根-块茎模型粘结参数Tab.7 Bonding parameters of Jerusalem artichoke root-tuber model
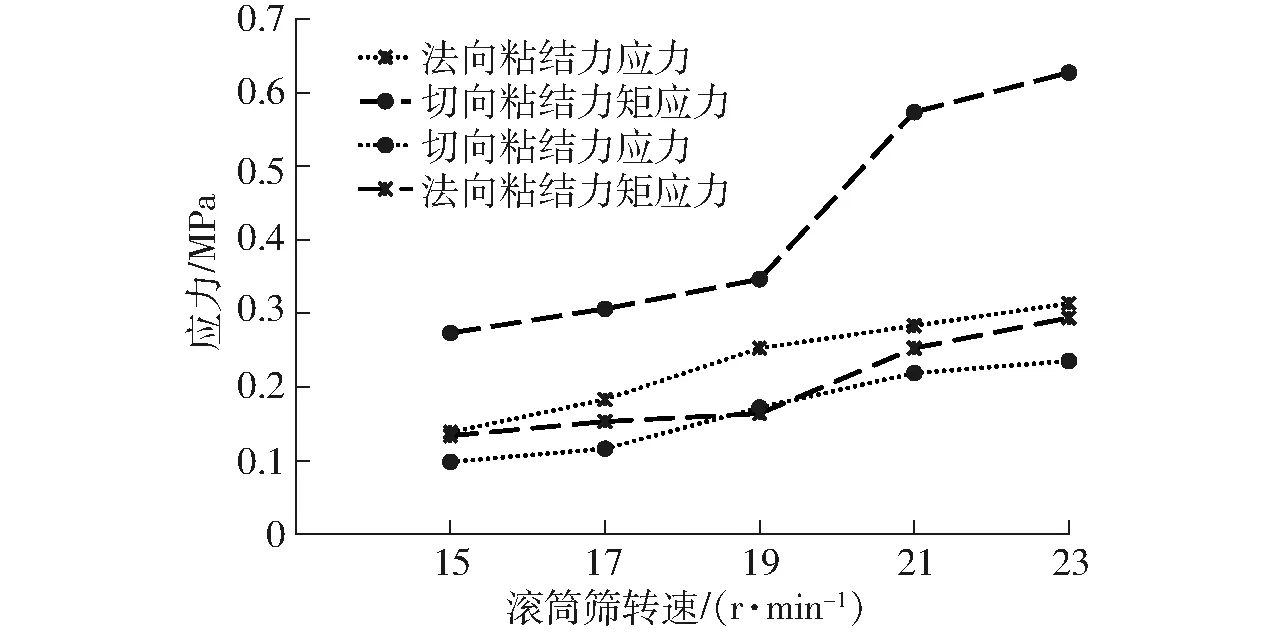
图5 粘结键粘结力及力矩应力变化曲线Fig.5 Curves of bond force and torque stress
由图5可知,根-块茎粘结键各因素产生应力整体变化随转速增加而增加,且法向粘结力及切向粘结力矩整体在切向粘结力及法向粘结力矩之上,由式(6)说明σmax产生的破坏效应大于τmax。此外,法向及切向粘结力应力增长整体缓和,而法向及切向粘结力矩应力在转速19 r/min后出现明显增长,这可能是由于滚筒筛转速增加,筛内物料运动形式由滑动向抛落过渡,使得滚筒筛对菊芋根茎的弯折相对于拉扯作用进一步增强。
由于各因素对于断键影响趋势较为接近,且真实滚筒筛内块茎力矩较难测量,由式(6)可知,适当增加粘接半径比可增加粘结键横截面积,降低粘结键所受力矩对断键的影响,将根-块茎颗粒粘接半径比取为4.0;将拉伸试验过程中根须段刚度看作柔性根须与块茎颗粒之间连接刚度,根-块茎颗粒法向及切向粘结刚度取5.112×106N/m3,拉伸试验过程中根-块茎破坏拉力集中在24.65 N附近,由1.2.3节可知,根-块茎颗粒临界法向应力取13 344 Pa,根-块茎颗粒临界切向应力取11 443 Pa。
3 验证试验
3.1 三点弯曲及拉伸对比试验
为了验证标定粘结参数的准确性,进行根须三点弯曲试验及根-块茎拉伸仿真与实际对比试验,如图6所示,同时确保菊芋根与茎秆颗粒之间不断裂,模型参数如表1、7所示。

图6 三点弯曲及拉伸仿真试验与实际试验结果Fig.6 Three-point bending and tensile simulation and physical experiments
经检验,采用上述粘结参数组合进行柔性根须三点弯曲仿真试验得弯曲弹性模量为27.358 MPa,与实际测量值26.233 MPa的相对误差为4.29%。这说明所建立的回归模型能够较好地预测柔性根须弯曲弹性模量,柔性根须在标定的粘结参数下可以用于模拟菊芋根须受力弯曲特性。
拉伸试验效果如图6d所示(红色虚线表示切割前块茎轮廓),菊芋根-块茎抗拉力仿真值为27.50 N,与实际测量值25.53 N的相对误差为7.72%,模型能较好地反映块茎脱落力学特性。
3.2 块茎脱落对比试验
菊芋收获机滚筒筛装置通过对物料不断提升与抛落实现块茎脱落及筛分作用,必须选择合适的喂入量、倾角及转速等参数。根据菊芋根-块茎力学特性对比试验,进行菊芋块茎脱落测试,以验证模型用于清选及输送等环节工作参数优化的可行性。
3.2.1块茎脱落仿真试验
仿真试验按照表1、6、7设置模型参数,滚筒筛转速分别设为17、19、21 r/min,如图3d所示。仿真过程中,物料在滚筒筛内主要经历3次提升与抛落。以EDEM坐标原点水平面作为参考,从左到右,依次输出转速17 r/min下物料每次达到最大提升高度时的滚筒筛截面图。物料以不同颜色展示,代表与坐标原点水平面的相对距离,据此可以观察物料与滚筒筛的相对位置,如图7a所示。同样可得另外两个转速截面图,如图7b、7c所示。可知,筛内物料沿滚筒筛壁面提升至一定高度后滑落或抛落,运动形式与滚筒筛作用规律相符,表明仿真试验接触参数设置合理,同时可以发现,随着滚筒转速增加,筛内物料最大提升高度及离散程度增加,块茎脱落效果提升。

图7 不同转速下物料与滚筒筛的相对位置Fig.7 Relative position of materials and drum screen at different rotary speeds
为进一步分析仿真过程中菊芋块茎脱落情况,以物料沿滚筒筛轴线方向输送距离为横坐标轴,其中一组试验根-块茎颗粒之间粘结键数目变化曲线如图8所示。

图8 根-块茎颗粒之间粘结键数目变化曲线Fig.8 Curves of bonds number between root and tuber particles
由图8可知,菊芋根-块茎团聚体块茎脱落过程在滚筒筛内可分为2个阶段(以图中黑色虚线为分界)。第1阶段菊芋块茎刚接触滚筒筛,以较低初速度与筛体发生相对碰撞,大量粘结键在此阶段断裂,此时影响其断裂的主要因素为物料与滚筒筛的相对速度。第2阶段混合物料在筛内反复提升与抛落,其中,在转速21 r/min条件下,物料与滚筒筛相对速度最大,提升过程亦存在较多粘结键断裂,整体下降迅速,19 r/min条件下,提升过程断键较少,抛落触筛断键较多,呈阶梯式下降,17 r/min相对速度和提升高度最小,粘结键断裂趋缓。
若要获得较高脱落率,滚筒转速设置为19 r/min更优,过高转速会增加机器功耗和物料冲击作用而对块茎脱落率提升效果不大。
3.2.2块茎脱落田间试验
田间试验在江苏省盐城市王港新闸的菊芋种植田进行,土壤类型为沙土,为保证喂入情况与仿真条件相符,取收获机前进速度为1 km/h,挖掘深度为20 cm,在前述试验条件下,土壤在收获机前部输送链几乎全部落下而不进入滚筒筛,此外滚筒筛转速与仿真试验设计一致,如图9所示。

图9 块茎脱落田间试验Fig.9 Field experiments of tuber shedding
每个试验水平测试区域长度为20 m,作业后随机取3个长度为3 m的小区,统计块茎脱落率,取平均值作为最终结果。3个试验水平条件下,田间试验菊芋块茎脱落率分别为71.76%、93.48%、97.50%,可知17 r/min到19 r/min阶段,通过提升转速,收获机即可获得较高脱落率,超过19 r/min,进一步提升转速对脱落率影响不大,与仿真预测趋势一致。
由上述试验结果可知,仿真试验过程中菊芋根系弯曲交错、块茎受力脱落,与田间试验表现一致,此外仿真过程中筛内物料运动形式符合滚筒筛分规律,所构建的菊芋根-块茎模型能较准确反映真实菊芋根-块茎力学特性,可以将其应用于菊芋机械化收获相关环节作业参数优化。
4 结论
(1)基于离散元法,结合收获期菊芋根茎及块茎的力学特性,建立了菊芋根-块茎柔性模型并对其模型参数进行了标定。
(2)通过密度试验、斜面试验等确定了菊芋茎秆、根须及块茎本征参数及与Q235钢的摩擦因数、碰撞恢复系数等接触参数;利用三点弯曲和拉伸物理试验分别确定了菊芋根须弯曲弹性模量和根-块茎抗拉力等力学参数。
(3)利用单因素试验和响应曲面试验,得到菊芋根颗粒之间的粘结参数,基于根-块茎颗粒粘结键应力分析得到根与块茎颗粒之间的粘结参数。
(4)验证试验表明,菊芋根须弯曲弹性模量及根-块茎抗拉力仿真结果与实际测量值相对误差分别为4.29%和7.72%,滚筒筛转速对于菊芋块茎脱落率影响效应田间试验与仿真预测趋势一致。模型可为菊芋机械化收获清选及输送等环节作业参数优化研究提供理论模型支撑。