水下滑翔机研究应用现状及未来展望
2023-11-22屈新雨王征
屈新雨,王征
水下滑翔机研究应用现状及未来展望
屈新雨,王征
(海军工程大学电气工程学院,武汉 430033)
水下滑翔机是一种新型无人水下平台,可对目标海域进行连续、大范围的剖面观测与探测。文中简述了国内外水下滑翔机的研究应用现状,介绍了水下滑翔机集群观测应用的最新进展。最后,从水下滑翔机驱动能源、集成化传感器、耐压壳体、水下通信、集群控制及组网技术和部署方式六个方面,对水下滑翔机关键技术未来发展进行了展望。
水下滑翔机 单体技术 协同组网 关键技术
0 引言
世界海洋观测技术经历了科考船观测、卫星观测、浮潜标观测三代发展历程,但是观测效果还无法满足研究人员对海洋更深层次研究和认知的要求。随着自动控制技术的发展,海洋观测逐渐进入了机器人化的观测时代,水下滑翔机(Underwater Glider)也应运而生。水下滑翔机UG作为一种新兴的移动式水下观测平台,它以其低廉的成本、可重复利用、长久的续航能力、超长的作业周期以及广泛的作业范围等优点,现已成为海洋环境观测与探测平台的重要组成部分。此外,水下滑翔机UG在军事方面也有十分远大的发展前景。
1 水下滑翔机运动机理
对于无推进装置的水下滑翔机,主要是通过其净浮力变化作为驱动力。通过改变水下滑翔机重心与浮心的相对位置,实现水下滑翔机俯仰角的变化,进而实现水下锯齿型滑行运动。它的运动机理示意图如图1所示。实现净浮力变化一般有两种方式:第一种是改变自身排水体积,重量维持不变。运用该方式的水下滑翔机一般采用调节机体内油囊(气囊)或者活塞体积的方式实现。第二种是改变自身重量,排水体积维持不变。运用该方式的水下滑翔机一般采用压载水舱的方式实现。但此种方式受限于水下滑翔机平台体积以及海水泵等关键部件,所以一般在大型水下潜器中更为常见,比如潜艇、载人潜水器等。
水下滑翔机的转向运动可以通过三种方式实现:一种是通过转向舵实现水下滑翔机的转向。第二种是通过控制质量块的移动或非对称电源模块旋转产生横滚力矩,使水下滑翔机产生横滚,在水下滑翔机沉浮运动的同时,借助水平翼的水动力作用,从而完成转向运动。第三种是通过改变水下滑翔机两翼的襟翼舵摆角产生相对于浮心的摇艏力矩从而完成转向[1]。
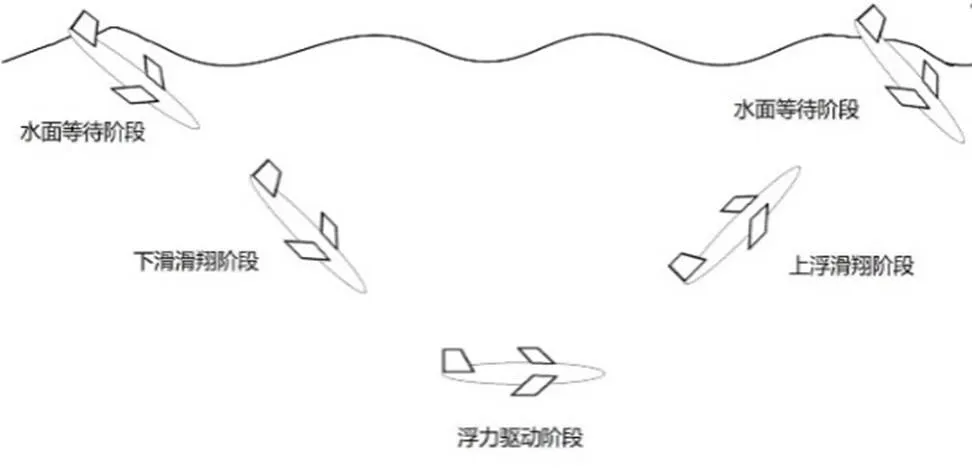
图1 水下滑翔机运动机理示意图
2 水下滑翔机国内外研究现状
水下滑翔机的概念可以追溯到20世纪60年代。1967年,Gongwer首次提出利用重力和浮力的变化作为水下装置推动力的想法[2]。Baz等人于1974年首次提出水下滑翔机的概念[3]。1989年,Stommel首次提出利用水下滑翔机进行海洋观测的想法[4]。至此,水下滑翔机开始高速发展,并衍生出多种门类。
2.1 水下滑翔机国外研究现状
国外在20世纪90年代就开展了水下滑翔机的研究工作,其中美国始终走在水下滑翔机研究工作的前列。1989年,美国伍兹霍尔海洋研究所在美国海军研究办公室的支持下研制出水下滑翔机样机SLOCUM[5]。1999年,美国华盛顿大学应用物理实验室研制出Seaglider水下滑翔机,其采用的新型材料可以有效节省能源[6]。同年,水下滑翔机Spary由美国斯克利普斯海洋研究所和伍兹霍尔海洋研究所共同研制成功[7]。2003年,美国斯克利普斯研究所和美国华盛顿大学合作,研制出一款名为X-Ray的超大翼型水下滑翔机,其重量约900 kg,翼展达到6 m,最高滑翔速度达到3 kn,为美国海军近海水下持续监视网络服务[8]。2010年,对水下滑翔机X-Ray进行优化后,新一代翼型水下滑翔机Z-Ray的稳定性和操控性得到显著提升。
此外,许多国家也在相继加大对水下滑翔机的研发投入。2009年,法国ACSA公司研发出代号为SeaExplorer的水下滑翔机[9]。同年,法国国立海军工程大学研发了水下滑翔机Sterne。2009年,北约水下研究中心开始研发水下滑翔机Folaga。另外,日本也很早就进行了水下滑翔机的相关研究,1992年,日本东京大学工业科学研究所设计研发出下潜深度可达300米的水下滑翔机样机ALBAC[10]。
2.2 水下滑翔机国内研究现状
新世纪初期,我国开始对水下滑翔机相关理论和技术进行研究。天津大学王树新等人于2005年研发出水下滑翔机实验样机,并于2005年7月在千岛湖水域进行了实验,该样机在完成25次剖面运动后回收[11]。同年,中国科学学院沈阳自动化研究所俞建成等人也研制出水下滑翔机,并完成湖上实验[12]。2007年,天津大学研制出代号为“海燕”的混合推进水下滑翔机试验样机,并于抚仙湖顺利完成湖上实验。2008年10月,中国科学学院沈阳自动化研究所成功研制出代号为“海翼”的水下滑翔机工程样机并于千岛湖顺利完成湖上实验。2009年,天津大学对实验样机“海燕”进行重新设计修改,第二代混合推进水下滑翔机“海燕”得以问世,其最大下潜深度可达500米。2014年5月,“海燕”水下滑翔机在南海进行海上实验,最大下潜深度超过1500米。2017年3月,由中国科学院沈阳自动化研究所研制的“海翼-7 000”水下滑翔机在海试中下潜深度达到6 329米。“海燕-X”水下滑翔机于2018年4月成功下潜至8213米[13]。2020年7月,“海燕-Xplus”水下滑翔机在海上试验中,最大下潜深度达到破世界纪录的10619米。“海燕-Xplus”水下滑翔机海上试验见图2。“海燕-L”水下滑翔机最远航程超过5 000km。
图2 “海燕-Xplus”水下滑翔机
此外还有国家海洋技术中心、中国船舶集团有限公司第702研究所、第710研究所、中国海洋大学、华中科技大学、浙江大学、上海交通大学等单位也对水下滑翔机进行了研究[14]。现将国外成熟水下滑翔机主要参数与国内水下滑翔机主要参数做对比,如表1所示。

表1 国内外水下滑翔机主要性能参数
3 水下滑翔机国内外应用现状
3.1 水下滑翔机单体应用现状
2008年,Castelao等人利用水下滑翔机对大西洋陆架海区水文特征的季节变化进行观测,得出该海域混合层厚度在离岸方向增加的结论[15]。2009年,Ruiz等人的研究利用水下滑翔机观测地中海的垂直结构并调查该海域的上层混合层,为深入了解地中海盐度分布和大西洋海水输入机制提供了重要参考。他们的研究结果表明海岸附近较低的盐度可能与大西洋海水的输入有关[16]。2011年,通过水下滑翔机的剖面数据,Todd在美国加州近海发现加利福尼亚流体的向极流支存在明显的断层,表明它们之间存在不连续性[17]。2012年,Ruiz等人利用水下滑翔机获得的数据对西地中海海气相互作用进行了描述[18]。2014年,Swart等人运用水下滑翔机在亚南极地区收集共计6个月的数据,通过数据研究发现强迫机制能够影响浮游植物的循环生产[19]。同年,我国研究人员利用“海翼”号水下滑翔机对南海混合层两个冷却事件进行研究,通过分析数据揭示了南海混合层的动态演变过程[20]。为了得到美国加利福尼亚近岸海域的潮汐变化情况及其分布特征,2006年至2012年期间,Rudnick通过7年的研究,利用水下滑翔机收集了超过52000个不同的剖面数据[21]。2017年,中国大洋第45航次获得了中东太平洋10°N断面等海域内水文、生物等调查数据,张磊等人对该海域10°N断面的水团构成进行了研究,揭示了热带中东太平洋水团与北太平洋副热带、亚极地和南太平洋副热带海区中上层水团间的循环过程[22]。2019年,杨得厚等人利用搭载CTD传感器的“海翼”号水下滑翔机在西北太平洋所获得的数据对中尺度涡旋进行了研究,结果表明涡旋的卷挟作用可以降低海洋混合层的温度[23]。
3.2 水下滑翔机集群应用现状
水下滑翔机集群观测能够更加充分发挥水下滑翔机低成本、长续航、可重复利用、作业周期长及作业范围大的优势。目前国际上许多海洋观测系统已经大规模使用水下滑翔机进行数据收集和相关实验。
3.2.1 自主海洋采样网
自主海洋采样网是由美国海军研究院自上世纪末开始资助的一个大型项目,其目的在于利用新型水下机器人来提高观测海洋的能力。AOSN于2000年至2006年在美国蒙特利海湾进行了一系列海洋观测实验。实验使用了最新的水下滑翔机技术,通过搭载各种传感器和设备,对海洋环境进行全面深入的观测和研究。在2006年的实验中,该项目研发了一种名叫“自适应采样”的新技术,该技术可以实时改变水下滑翔机的路径,从而达到更好的观测效果。另外,该项目还研究了水下滑翔机机群编队策略,用于提高观测效率。
3.2.2 综合海洋观测系统
综合海洋观测系统IOOS于2002年开始组建,是由美国海洋大气署主持的跨系统联邦计划。有害藻类勃发的预警、整合生态系统评价、海岸带淹没预测、表层海流监测这四大方面是其主要目标。IOOS于2014年1月正式发布《U.S.IOOS®National Underwater Glider Network Plan》,旨在建立一个拥有更多数量、更多编队的水下滑翔机网络。
3.2.3 欧洲滑翔机观测网
欧洲滑翔机观测网EGO最初是由来自法国、德国、意大利、挪威、西班牙和英国的一群物理海洋学家自发组织而成的。但随着该组织影响力的扩大,并不断吸收来自澳大利亚、加拿大、美国等国的物理海洋学家,逐渐形成了如今的规模。EGO原指“European Gliding Observatories”,但现在演变为“Everyone’s Gliding Observatories”[24]。从2005年至今,EGO陆续布放了超过600台次水下滑翔机用于各项任务。这些水下滑翔机被应用于大西洋海域海洋剖面数据信息的实时采集,包括海洋温度、盐度、流速、海洋生态系统的监测和生物多样性调查等。
3.2.4 澳大利亚综合海洋观测系统
澳大利亚综合海洋观测系统IMOS组建于2006年,将长期海洋变化、多变及极端气候、边界流、大陆架及近岸过程、生态系统响应等5大领域作为主要研究对象。IMOS系统的子观测网(Australian National Facility for Ocean Gliders, ANFOG)负责水下滑翔机编队的运行和维护,用来对澳大利亚周边海域进行观测。迄今为止,它已经累计布放300余台次水下滑翔机用于对大陆架海域的物理、化学、生物现象的高分辨率观测和预报。
3.2.5 美国海军近海水下持续检测网络
水下军事目标的探测与打击一直以来是世界各国军事领域的研究重点。为此,美国海军积极建设水下信息网络,提高海军反潜作战能力。美国近海水下持续检测网络PLUSNet是一种由海底固定设施与水下航行器共同组建的大型水下检测网络[25]。水下滑翔机凭借其独特优势,在美国近海水下持续检测网络PLUSNet中扮演不可或缺的角色,为美军近海防御体系提供平台支持。
3.2.6 国内水下滑翔机集群研究进展
2014年9月,3台由天津大学研发的水下滑翔机在我国西沙海域进行了组网相关实验,标志着国内水下滑翔机组网研究的开始。2017年7月,中科院沈阳自动化研究所在南海北部布放了12台“海翼”号水下滑翔机进行组网,开展对反气旋涡的三维结构和时间演变过程的观测,共获得超3700多个不同深度剖面数据[26]。2017年8月,7台专门用于观测台风的“海燕”水下滑翔机进行组网,对“天鸽”和“帕卡”两大台风进行了观测,实验成功地获得了台风现场全过程数百个剖面数据,为深入了解台风形成和发展的规律提供了重要依据。2019年10月,我国第10次北极考察期间成功实施了水下滑翔机首次北极海域组网观测。实验使用3台“海燕”水下滑翔机,通过组网观测的方式对北极海域水体与生化要素进行了观测,为深入了解北极海域的海洋环境和生态系统提供了重要数据支持[27]。2019年12月,中国科学家在东印度洋海域开展水下滑翔机集群协同观测实验。这项实验由“向阳红06”号科考船主导,共布放了12台“海翼”水下滑翔机。
4 水下滑翔机未来发展展望
当前水下滑翔机正如火如荼蓬勃发展,各类研究已经从单体转向集群。但是水下滑翔机部分关键技术仍需突破,下面对水下滑翔机部分关键技术做出分析,并提出几点建议。
4.1 驱动能源
目前常规水下滑翔机通常采用锂电池作为驱动能源,锂电池相比其他电池具有工作电压高、比能量高、自放电小、使用寿命长等优点。随着对水下滑翔机拥有更长续航和携带更多传感器及附属数据处理分析的需求,受限于水下滑翔机内部空间,传统锂电池逐渐无法满足这一要求。当前锂硫电池、镁/铝海水燃料电池作为最新的研究方向,其能量密度可达锂电池的十倍以上,有望在未来替代传统锂电池成为新的水下滑翔机驱动能源,实现水下滑翔机续航力、自持力的显著提升。
4.2 集成化传感器
大量水下滑翔机的实际应用已经证明,水下滑翔机是一种低成本、可重复利用的理想水下平台。水下滑翔机功能主要体现在其搭载的传感器上,但由于平台体积、重量和能耗的限制,不能无限制的在水下滑翔机上搭载多种传感器从而提升其应用价值。研究集成化传感器,对传感器的体积、重量和能耗进行优化再设计,结合传感器对水下滑翔机外形及内部结构进行优化可以实现水下滑翔机功能的有效集成。
4.3 耐压壳体
水下滑翔机向深海型发展具有重要意义,而耐压壳体材料的研究是其中的关键技术。常见耐压壳体材料主要分为金属类与非金属类。金属类一般包括铝合金、钛合金等,非金属类一般包括各类树脂复合材料。目前世界主流水下滑翔机耐压壳体均选择铝合金为主材料。随着工艺的提升以及价格的降低,诸如钛合金、碳纤维等材料会凭借更高强度,更轻重量、更低磁性和更耐腐蚀等特点逐步替代目前常用的铝合金材料,实现水下滑翔机向更深海域探索的目标。
4.4 水下通信
目前常见的通信方式是水声通信,声波在水中衰减小,传播速度可达到千米每秒。但是水声通信也有很大缺陷,例如多路径效应、多普勒效应以及受环境噪声影响较大等。未来,激光通信和磁通信有望作为新型水下通信方式。
4.5 集群控制及组网技术
加强水下滑翔机大规模集群观测与探测能力,通过水下组网,可以极大提升水下滑翔机的观测范围,弥补了单台水下滑翔机探测范围、精度的不足。未来,水下滑翔机可以加强与卫星、无人船、海上观测平台、智能浮标、海床基等异构节点的组网能力,形成立体式观测网,建立持久、广域的水下预警探测体系。
4.6 部署方式
水下滑翔机体积小、重量轻,目前水下滑翔机一般采用母船吊放的部署方式。为提高水下滑翔机群部署效率,可以采用水下部署或空中投放的方式。水下部署方式是指水下滑翔机采用鱼雷发射的方式,以高压气体作为驱动力,由大型水下平台,如潜艇等进行部署。空中投放是指借鉴投放式声纳的部署方式,利用直升机或者运输反潜机将水下滑翔机群按预定队形顺序直接进行空中投放。
5 结语
水下滑翔机作为一种新型水下平台,具有低成本、长续航、可重复利用等优点。在民用领域,水下滑翔机被广泛运用于海洋科学研究、海洋环境监测、海洋资源勘探等领域。在军事领域,水下滑翔机的应用也越来越广泛。因其具有隐蔽性强、持续性长等优势,能够在反潜侦察、水下情报收集、水下通信等方面发挥重要作用。尤其是水下滑翔机群,能够协同作战,在更大范围内完成海洋侦察和监测任务,提高军事作战效率和水面作战安全性。在未来,水下滑翔机也将继续发展壮大,占据更加重要的地位。
[1] 俞建成, 陈质二, 王振宇, 等. 自主水下滑翔机[M]. 北京: 科学出版社, 龙门书局, 2020: 24-25.
[2] Brandau J H. Aspects of performance evaluation of waterjet propulsion systems and a critical review of the state-of-the-art[J]. J hydronaut, 1967, 2(2): 85.
[3] Baz A, Seireg A. Optimum design and control of underwater gliders[J]. J Eng Ind, 1974, 96(1): 304-310.
[4] Stommel H. The Slocum mission[J]. Oceanography, 1989, 2(1): 22-25.
[5] Webb D C, Simonetti P J, Jones C P. SLOCUM: an underwater glider propelled by environmental energy[J]. IEEE J Ocean Eng, 2001, 26(4): 447-452.
[6] Eriksen C C, Osse T J, Light R D, et al. Seaglider: a long-range autonomous underwater vehicle for oceanographic research[J]. IEEE J Ocean Eng, 2001, 26(4): 424-436.
[7] Rudnick D L, Davis R E, Sherman J T. Spray underwater glider operations[J]. J Atmos Ocean Technol, 2016, 33(6): 1113-1122.
[8] D'Spain G L, Jenkins S A, Zimmerman R, et al. Underwater acoustic measurements with the Liberdade/X‐Ray flying wing glider[J]. J Acoust Soc Am, 2005, 117(4): 2624.
[9] Claustre H, Beguery L, Patrice P L A. SeaExplorer glider breaks two world records multisensor UUV achieves global milestones for endurance, distance[J]. Sea Technol, 2014, 55(3): 19-22.
[10] Wood S, Mierzwa C E. State of technology in autonomous underwater gliders[J]. Mar Technol Soc J, 2013, 47(5): 84-96.
[11] 王树新, 王延辉, 张大涛, 等. 温差能驱动的水下滑翔器设计与实验研究[J]. 海洋技术, 2006, 25(1): 1-5.
[12] 俞建成, 张奇峰, 吴利红, 等. 水下滑翔机器人系统研究[J]. 海洋技术, 2006, 25(1): 6-10, 19.
[13] 曹俊, 胡震, 刘涛, 等. 深海潜水器装备体系现状及发展分析[J]. 中国造船, 2020, 61(1): 204-218.
[14] 沈新蕊, 王延辉, 杨绍琼, 等. 水下滑翔机技术发展现状与展望[J]. 水下无人系统学报, 2018, 26(2): 89-106.
[15] Castelao R, Glenn S, Schofield O, et al. Seasonal evolution of hydrographic fields in the central Middle Atlantic Bight from glider observations[J]. Geophys Res Lett, 2008, 35(3): L03617.
[16] Ruiz S, Pascual A, Garau B, et al. Mesoscale dynamics of the Balearic Front, integrating glider, ship and satellite data[J]. J Mar Syst, 2009, 78: S3-S16.
[17] Todd R E, Rudnick D L, Mazloff M R, et al. Poleward flows in the southern California Current System: Glider observations and numerical simulation[J]. J Geophys Res Oceans, 2011, 116(C2): C02026.
[18] Ruiz S, Renault L, Garau B, et al. Underwater glider observations and modeling of an abrupt mixing event in the upper ocean[J]. Geophys Res Lett, 2012, 39(1): L01603.
[19] Swart S, Thomalla S J, Monteiro P M S. The seasonal cycle of mixed layer dynamics and phytoplankton biomass in the Sub-Antarctic Zone: a high-resolution glider experiment[J]. J Mar Syst, 2015, 147: 103-115.
[20] Qiu C H, Mao H B, Yu J C, et al. Sea surface cooling in the Northern South China Sea observed using Chinese sea-wing underwater glider measurements[J]. Deep Sea Res Part I Oceanogr Res Pap, 2015, 105: 111-118.
[21] Johnston T M S, Rudnick D L. Trapped diurnal internal tides, propagating semidiurnal internal tides, and mixing estimates in the California Current System from sustained glider observations, 2006–2012[J]. Deep Sea Res Part II Top Stud Oceanogr, 2015, 112: 61-78.
[22] 张磊, 田永青, 潘爱军, 等. 热带中东太平洋海域10°N断面水团分析[J]. 海洋学报, 2019, 41(11): 40-50.
[23] 杨得厚. 水下滑翔机在西北太平洋混合层与涡旋研究中的应用[D]. 厦门: 自然资源部第三海洋研究所, 2021.
[24] 常虹, 薛桂芳, Alexander P, 等. 欧洲水下滑翔机发展应用现状及其法律规制——对中国借鉴意义之思考[J]. 中国海商法研究, 2012, 1(1): 109-114.
[25] 金翔. 多水下滑翔机系统编队变换和路径规划研究[D]. 大连: 大连海事大学, 2018.
[26] Shu Y Q, Chen J, Li S, et al. Field-observation for an anticyclonic mesoscale eddy consisted of twelve gliders and sixty-two expendable probes in the northern South China Sea during summer 2017[J]. Sci China Earth Sci, 2019, 62(2): 451-458.
[27] 毛柳伟, 杜度, 李杨. 水下滑翔机集群应用现状与关键技术展望[J]. 舰船科学技术, 2020, 42(23): 13-20.
Research and application status of underwater glider and future prospects
Qu Xinyu, Wang Zheng
(Schoolof Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
U674.941
A
1003-4862(2023)11-0027-06
2023-05-17
屈新雨(1996-),男,硕士研究生,研究方向:集群控制。E-mail:602256804@qq.com
王征(1978-),男,副教授,研究方向:智能控制技术、水下无人系统。E-mail:marchy618@163.com。
