动力定位船舶推进器速度跟踪半实物模拟系统研发
2023-11-22曾步辉吴德烽
曾步辉,吴德烽
动力定位船舶推进器速度跟踪半实物模拟系统研发
曾步辉,吴德烽
(1. 集美大学轮机工程学院,福建 厦门 361021;2. 福建省船舶与海洋工程重点实验室,福建 厦门 361021)
船舶动力定位系统(Dynamic Positioning System, DPS)主要由测量子系统、控制子系统和推进子系统组成。本文在前期研究基础上,结合推进器速度跟踪控制方法,采用发电机+可调负载的模式模拟未知海况下变化的负载,研发了C#和调速系统的通信接口,同时采用转速传感器反馈推进器的实际转速并在软件界面上显示。通过研发实际的半实物模拟系统,实验数据表明,在负载扰动下,模拟系统能够有效地跟踪推力分配发出的速度指令信号。
动力定位系统 推进器局部控制器 半实物仿真 变频调速
0 引言
诸多海洋资源开发活动需要船舶安全可靠地在海洋环境下以设定的位置和艏向维持在海平面上,从而完成海上作业,动力定位系统(Dynamic Positioning System, 简写DPS)即是其不可缺少的支持系统[1]。船舶动力定位系统主要由测量子系统、控制子系统和推进子系统组成。控制子系统实时准确地计算出船舶保持期望位置与艏向所需要的控制力向量,即水平力和艏摇弯矩,所需的控制力向量经推力分配,得到各个推进器的推力和方向指令,将推进器推力映射到推进器的转速,进而底层推进器控制推进器的转速,达到船舶定位的目的。推力分配系统是动力定位系统的重要组成部分,是动力定位系统的执行机构,其作用是按照控制系统发出的一系列推力指令,推力分配算法将期望的合力和合力矩分配给各个推进器[2,3],形成一个时变合力与合力矩,以抵消外在的时变环境载荷[3,4]。
推力分配算法将期望的合力和合力矩分配给各个推进器后,各个推进器得到所产生推力的指令,而后通过推进器的局部控制器调节推进器的转速,以此达到实现期望推力的目的[5]。船舶动力定位中的推进器主要有槽道推进器、全回转推进器和吊舱推进器等几种。全回转推进器和槽道式推进器在动力定位系统中的应用最为广泛。作为动力动力系统完成定点定位任务的执行机构,其产生推力的准确性、运行的可靠性和安全性关系到动力定位船的生存,是成功完成海上特殊作业的重要保障,因此推进器控制具有重要作用。
推进器控制属于动力定位中的底层控制[6],已有多位学者对推进器建模控制与仿真取得研究成果。文献[7]考虑了螺旋桨的空泡效应,设计了推进器的控制器。文献[8]提出一种基于Matlab Stateflow工具箱的动力定位分层控制系统建模方法,使仿真研究具有现实意义。文献[9]基于开发了基于simulink动力定位仿真系统,可以有效仿真底层推进器控制。
然而,上述研究成果均局限于纯软件仿真,未能结合推进器具体对象进行半实物仿真。为此,本文在课题组前期开发的船舶动力定位推力分配仿真系统[10]基础上,采用三相异步电机作为推进器实物模型,结合变频调速技术和发电机负载,更好地在实验室环境下研究动力定位推进系统。
1 动力定位推进器速度跟踪模拟系统的 组成

2 推进器推力可变模拟系统
2.1 推进器推力与转速的映射关系
船舶定点控位的设定值为大地坐标系下的某一点,当船舶偏离设定位置时,动力定位系统能够自动控制船舶移动其设定位置,并保持精确位置。
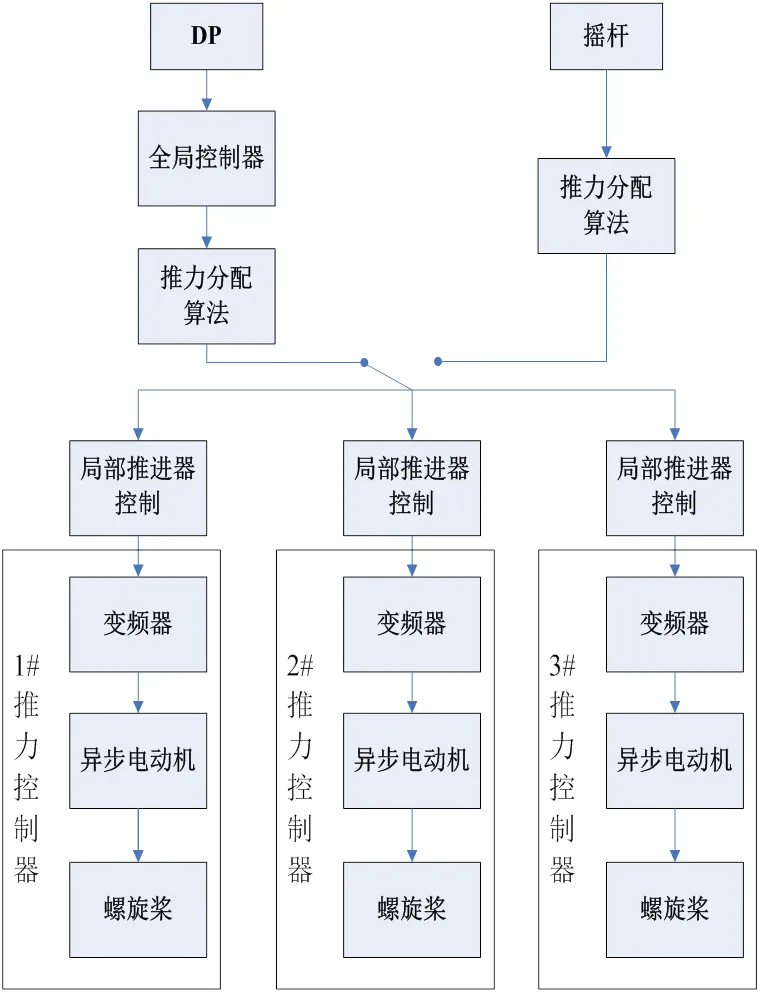
图1 推力控制器的结构框图


2.2 负载扰动实现方法
将未知海况的影响,映射到螺旋桨的负载扰动,我们认为该负载扰动有界。采用电动机连接可变电阻和可变电感,通过改变可变电阻和可变电感连接在负载上的值,可模拟出未知海况下的负载有界扰动情况。推进模拟系统如图2所示。硬件配置如下:控制器型号:S7-200CN SIEMENS;变频器型号,MICROMASTER 420,3 kW;电动机型号;Y100L1-4,2.2 kW,380V,1420 r/m;转速转矩传感器型号:JSC-100 测量范围0-600 r/m;发电机型号:STC-5.5 kW,1500 r/m,9 A;可变电阻型号:BX8-37 0.75-2.3 A 96-288 Ω;分段电阻型号:RX-F 4 kW,36 Ω;可调电感型号: TSGC2 WDFKDG 500 VAR;
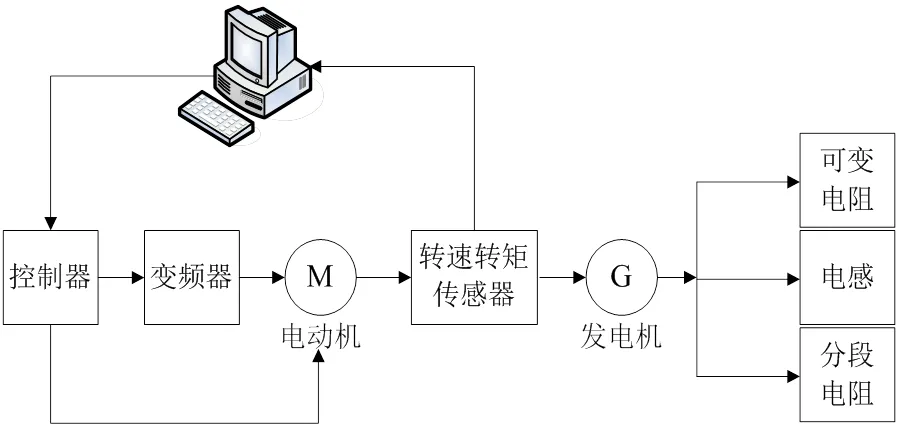
图2 推进模拟系统的结构框图
3 实验结果
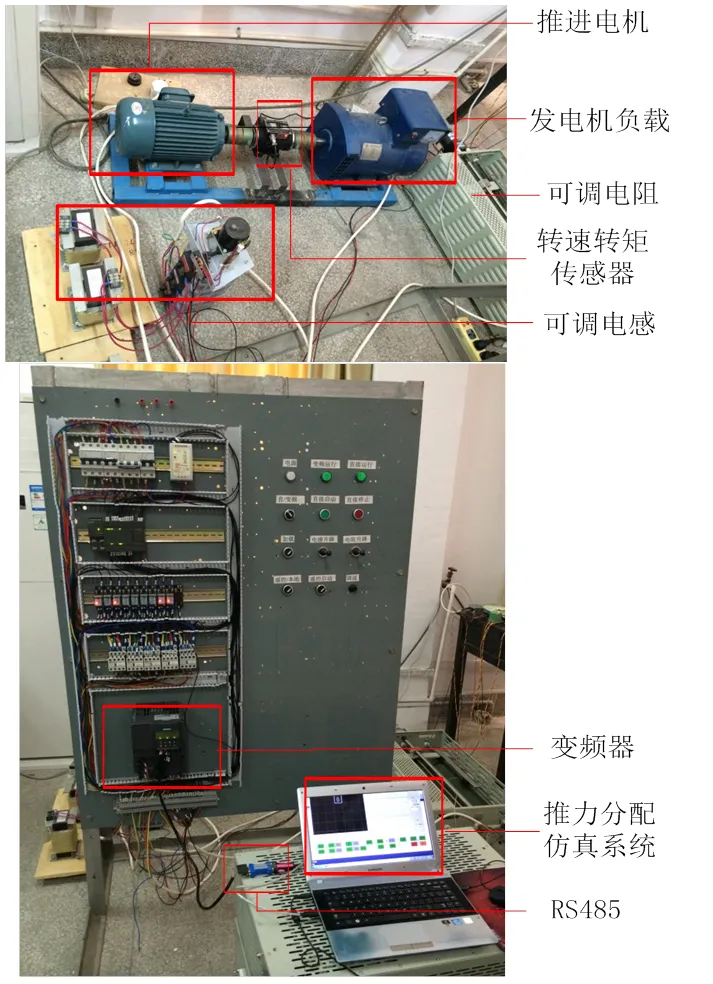
图3 半实物推进模拟系统实物图
图3是半实物推进模拟系统实物图,将USB-RS232转RS485 接在计算机串口和变频器上,启动MM420的调试软件DriveMonitor。从软件中看到连接状态为:“Connection with dvice”表示通信接线成功。
将PC与变频器相连接进行USS通信前,设定P0700=5,P1000=5 (MM420默认频率设置为50 Hz,表示为100%输出)此时切换为远程控制,变频器MM420的BOP面板启停按钮将锁定。
通信前试用串口调试软件进行通信测试工作,试发送停止报文内容“02 0E 05 00 00 00 00 00 00 00 00 04 7E 00 00 73” 反馈报文为“02 0A 05 00 00 00 FB 31 00 00 C7”表示工作正常。
本论文中,考虑到船舶动力定位过程中推进器转速不高,因此设定期望最高转速为80 r/min,对应的频域约为2.67 Hz,定位过程中转速低至10 r/min 为小于0.5 Hz运行频率。若变频器在低频率下运行较长时间,可能会导致设备损坏。所以在变频调速过程中采用3组不同的频率段进行测试。分别由3.0 -0.5 Hz,5 -2.5 Hz,7.5 -2.5 Hz组成。变频器的升速降速时间统一设定为5 s。
为了验证速度跟踪效果,需要进行多次实验,通过实时读取转速器反馈得到多组不同频率的数据组,限于篇幅,仅给出图4,从图4中可以看出,从转速与时间关系的数据折线图中分析曲线的大致趋势可以判断出当模拟器转速上升或者下降时,变频器也会根据命令做出响应来进行升速或者降速。
图5给出的是某次动力定位过程中的推进器的推力曲线,及其对应的转速,特别的,给出了推进器的期望转速和实际反馈的转速。因此,从实验中能够看到:随着船舶动力推进模拟器中发出给定转速的变化,变频器能够运行在相应的频率段,从而推进器的转速能调速至期望转速,实现推进器速度的跟踪。
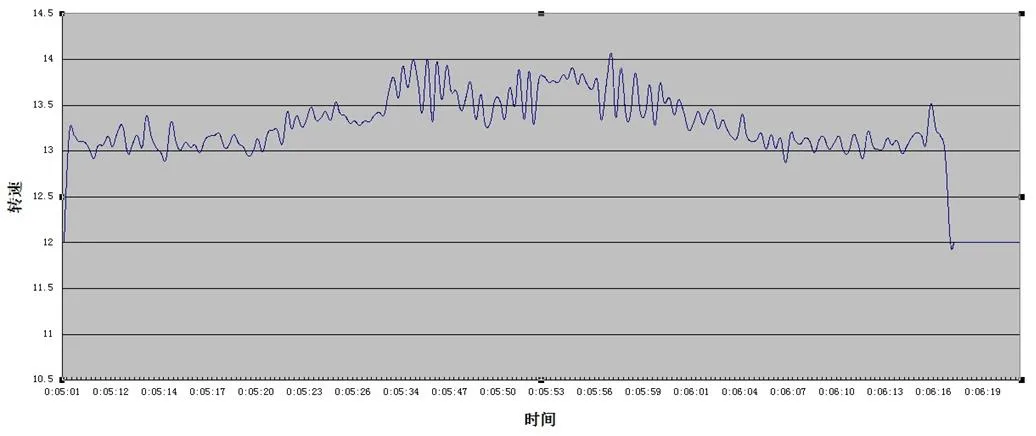
图4 变频器中转速信号
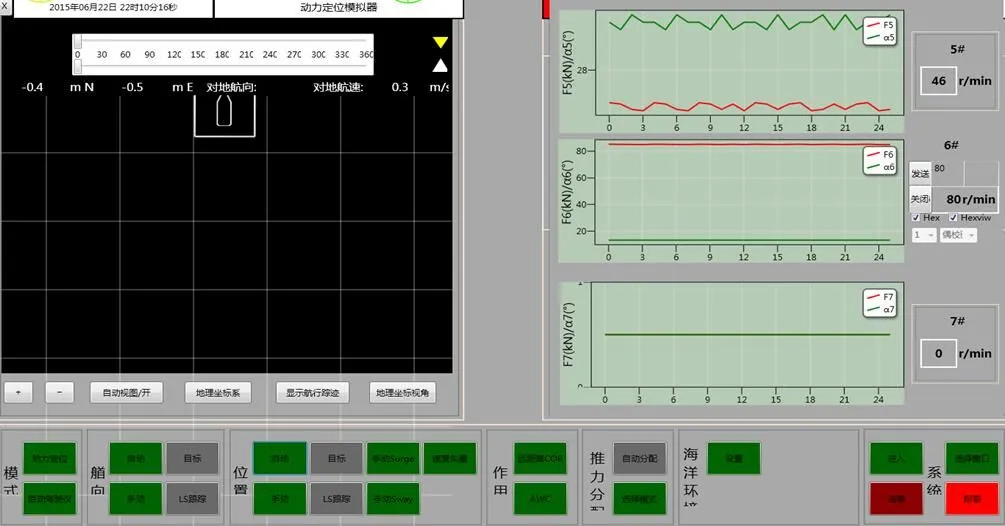
图5 推力速度跟踪模拟系统界面效果
4 结语
研发硬件在环的船舶动力定位模拟器需要消化吸收其所包含的诸多关键技术。本文针对实验室环境下动力定位推进器推力模拟可变,结合推进器速度跟踪控制方法,采用发电机+可调负载的模式模拟未知海况下变化的负载。通过推进器推力和转速的关系,设计推进器模拟调速系统,达到模拟海洋环境变化下推进器推力可变的目的。研发动力定位模拟器和推进器速度跟踪系统的通讯接口,进一步和前期研发的动力定位推力分配仿真配合形成硬件在环的速度跟踪模拟系统。
通过研发实际的模拟系统,实验数据表明,在负载扰动下,该推进器速度跟踪模拟系统能够有效地跟踪推力分配发出的速度指令信号,最终实现硬件在环船舶动力定位推力系统的研发。
[1] 边信黔, 付明玉, 王元慧. 船舶动力定位[M]. 北京: 科学出版社, 2011: 1-2.
[2] 吴德烽, 任凤坤, 尹自斌. 基于人工蜂群算法的船舶动力定位自抗扰控制器设计[J]. 船舶工程, 2015, 37(8): 52-56, 88.
[3] 吴德烽, 杨国豪. 船舶动力定位关键技术研究综述[J]. 舰船科学技术, 2014, 36(7): 1-6.
[4] 吴显法, 王言英. 动力定位系统的推力分配策略研究[J]. 船海工程, 2008, 37(3): 92-96.
[5] Huang Y Q, Wu D F, Yin Z B, et al. Design of UDE-based dynamic surface control for dynamic positioning of vessels with complex disturbances and input constraints[J]. Ocean Eng, 2021, 220: 108487.
[6] Sørensen A J. A survey of dynamic positioning control systems[J]. Annu Rev Control, 2011, 35(1): 123-136.
[7] Bakkeheim J, Johansen T A, Smogeli Ø N, et al. Lyapunov-based integrator resetting with application to marine thruster control[J]. IEEE Trans Control Syst Technol, 2008, 16(5): 908-917.
[8] 郭晨, 雷正玲. 海洋动力定位分层控制系统的建模与仿真研究[J]. 系统仿真学报, 2014, 26(5): 1118-1124.
[9] Chin C S. Dynamic positioning simulation, thrust optimization design and control of a drill ship under disturbances and faulty thruster[J]. Simul, 2012, 88(11): 1338-1349.
[10] 刘学军, 吴德烽, 杨国豪, 等. 面向船舶动力定位模拟器的推力分配仿真子系统开发[J]. 船舶工程, 2014, 36(4): 96-100.
[11] 刘学军. 船舶动力定位模拟器中的推力系统关键技术研究[D]. 厦门: 集美大学, 2014.
Development of thruster speed tracking semi-physical simulation system for dynamic positioning vessels
Zeng Buhui, Wu Defeng
(1. School of Marine Engineering, Jimei University, Xiamen 361021, Fujian, China; 2. Fujian Provincial Key Laboratory of Naval Architecture and Ocean Engineering, Xiamen 361021, Fujian, China)
U664
A
1003-4862(2023)11-0039-04
2023-06-23
福建省杰出青年科学基金(2022J06025)。
曾步辉(1973-),男,高级实验师,主要从事船舶电气自动化方面的研究及实验教学。Email:zengbuhui@126.com。
吴德烽(1984-),男,博士,教授,博士生导师,主要从事智能船舶技术研究。Email: arcwdf@gmail.com。
