不同功能材料网格柔性应变传感器的对比研究及应用
2023-11-21翁国强唐智杰詹政孙权鹿业波
翁国强,唐智杰,詹政,孙权,鹿业波
(1.嘉兴学院 浙江省医学电子与数字健康重点实验室,浙江嘉兴314001;2.浙江理工大学 机械工程学院,浙江杭州310018)
柔性应变传感器因具有良好的灵敏度和应变范围等特点,在人机交互、运动监测和医疗健康等领域发挥着越来越重要的作用.[1-5]目前,材料和结构的改进是柔性应变传感器研究的重点.常用的导电材料主要有碳纳米管、石墨烯和导电复合材料等,[6-10]如,Xu等将碳纳米管和MXene掺入多孔PDMS海绵中,开发的一种多功能柔性应变传感器,其灵敏度与响应时间均得到了大幅度提升.[11]Huang等使用激光诱导石墨烯制备了一种可穿戴柔性应变传感器,设计了波浪形状槽结构来承受主要应变,具有高耐用性和动态响应快的特性.[12]Cheng等将填充有镀银玻璃纤维和碳纤维的导电硅橡胶嵌入PDMS基体中,通过3D打印工艺制备了可监测各种关节运动的柔性应变传感器,可应用于软体机器人和可穿戴电子产品,实现复杂人体运动识别的功能.[13]目前,传感器的结构大多使用夹层式、多孔式、网格式,如,Yang等制备了一种基于MXene/聚吡咯/羟乙基纤维素导电材料和PDMS柔性基板的夹层结构柔性应变传感器,该传感器具有宽线性应变检测范围和较高的可重复性,在监测人体生理活动、测量外部变化、实时运动检测以及手写识别等方面表现出优异的性能.[14]Zhang等研发了一种由炭黑和多壁碳纳米管组成的多孔结构的柔性应变传感器,可以监测人体运动和人体呼吸变化,在人体生理活动监测方面的应用前景广阔,具有较高的稳定性,但在应变范围和灵敏度方面有待提高.[15]Wang等设计开发了一种网格结构的柔性应变传感器,由热塑性聚氨酯/碳纳米管层基底和银纳米线表层薄膜组成,响应速度快(300 ms)、动态稳定性好,在人体运动检测方面具有巨大的应用潜力.[16]许利强等基于Ecoflex-石墨烯复合材料,通过对比两种网格柔性传感器的应变范围,发现六边形网格柔性应变传感器在拉伸/释放疲劳寿命检测中表现出了更优的综合性能,同时,该传感器在手肘关节运动和人体不同呼吸状况监测方面表现良好.[17]
以上研究通过采用改变柔性传感器制造材料或结构,单方面提升了传感器的灵敏度或检测量程,但仍未解决高灵敏度和宽检测量程兼容这一难题.针对这一技术难点,本文对比了不同导电功能材料对传感器灵敏度和检测量程的影响,进行了拉伸断裂极限测试和灵敏度研究,试验结果表明,基于Ag-Ecoflex-Graphene的网格柔性应变传感器兼具了高灵敏度和宽检测量程.将此传感器应用于人体运动检测,通过建立单通道和多通道检测系统,可分别实现人体手腕活动关节的运动检测以及手势识别.
1 实验材料与流程
1.1 实验材料
由于导电功能材料对传感器性能有关键影响,本文采用了高导电性和导热性的单层纳米石墨烯粉末(纯度:99%,厚度:1~2 nm,片径:2~3 μm,南京先丰纳米材料科技有限公司)、导电性能良好的低温固化导电银浆(深圳市奥斯邦股份有限公司),为了使传感器具有良好的拉伸、弯曲及压缩性能,本文选择了杨氏模量较低、拉伸性能高达900%的Ecoflex 00-30-A、B材料(美国Smooth-On公司).
1.2 制备流程
传感器制备方法因材料特性不同而不同,石墨烯传感器的制备主要采用模具法.首先,通过Solidworks和3D打印技术,设计并制备网格结构传感器模具,其中,网格传感器形状为3×3个四边形网格,每个网格的尺寸为5 mm×5 mm×2 mm(长×宽×高),网格间隙为200 μm;其次,按照质量比1∶1,将Ecoflex 00-30-A、B溶液混合,加入适量的石墨烯粉末;接着,充分搅拌上述混合物,将其浇注到设计的传感器模具中,其中,Ecoflex混合溶液与石墨烯的质量比为1∶0.13;[17]最后,将模具和传感器置于电热鼓风干燥箱中,控制恒温在60 ℃,持续加热2 h后从模具中分离出网格传感器,此类型传感器为试样A.
在石墨烯和Ecoflex的混合基底与导电银浆的柔性传感器制备过程中,也采用这种方法.通过Solidworks设计出银网格传感器模型,使用3D打印机打印出反倒模具,再利用反倒模具法,向内浇注混合物从而形成一个硅胶模具,最后,将导电银浆通过针管浇注到硅胶模具的沟槽中,待其成型后,即形成了可拉伸的银网格传感器.其中,采用反倒模具法在石墨烯和Ecoflex的混合基底上浇注银浆为试样B,在固化的Ecoflex基底上直接浇注银浆为试样C,完整制备流程如图1所示.

图1 3种不同柔性应变传感器的制备流程图
2 实验结果与讨论
本文分别制备了3种不同的柔性应变传感器,如图1所示,试样A由Graphene和Ecoflex组成,试样B由Graphene、Ecoflex和Ag组成,试样C由Ecoflex和Ag组成.从理论上,样品A在Graphene和Ecoflex混合时,由于Graphene具备良好的导电性,Ecoflex能赋予其良好的柔韧性,故当Ecoflex∶Graphene质量比例控制在1∶0.13时,传感器同时具备良好的导电性和拉伸应变能力,但是应变灵敏度相对较弱;样品C虽能在保证导电的同时具备高灵敏度,但拉伸应变范围较小;样品B具备了石墨烯网格传感器的良好导电性和耐用性,同时,具备了银网格传感器的高灵敏度和动态响应快的特点.
本文利用AES-4SD柔性电子器件综合测试平台,对3种不同传感器进行拉伸应变实验.使用WDW-0.5C微机控制万能试验机(上海华龙测试仪器有限公司),比较3种不同网格传感器在相同实验条件下的最大拉伸应变范围,同时,使用数字源表(Keithley 2450)对3种不同网格柔性传感器通入1 mA的直流电,检测电阻变化值并分析其拉伸应变能力.通过调节万能试验机使试样的初始长度相同并记录,如图2所示.

拉伸实验过程 局部放大图图2 拉伸实验过程和局部放大图
做拉伸试验,同时观察传感器的拉伸情况,拉伸至网格柔性应变传感器失效并记录数据,3种不同传感器的极限拉伸应变分别如图3(a-c)所示.对3种不同网格柔性应变传感器进行拉伸应变试验,得到如图3(d)所示的电阻变化率与拉伸应变之间的关系,试验表明,Graphene-Ecoflex网格柔性应变传感器电阻随着拉伸应变的增大而缓慢增加,当拉伸应变达到65.0%、灵敏度为0.08%时,石墨烯基底发生断裂;Ag-Ecoflex网格柔性应变传感器的拉伸应变达到9.2%、灵敏度为0.25%时,银网格发生断裂,电阻跃迁式增大,由于Ecoflex不导电,故形成断路;Ag-Graphene-Ecoflex网格柔性应变传感器在拉伸应变达12.0%、灵敏度为0.30%时,银网格发生断裂,电阻跃迁式增大,但由于石墨烯作为导电基底材料,因此传感器仍具有导电性,其电阻随着拉伸应变的增大而缓慢增大,当拉伸应变达到65.3%时,石墨烯基底发生断裂.基于以上试验发现,相比于另外两种传感器,Ag-Graphene-Ecoflex网格柔性应变传感器在完全断裂时有更高的极限拉伸应变能力.

(a)试样A传感器失效图;(b)试样B传感器失效图;(c)试样C传感器失效图;(d)拉伸应变与电阻变化率关系图3 3种不同传感器的极限拉伸应变
如表1所示,当试样A的拉伸应变为65.0%时,传感器的电阻率达到了58.91Ω·m;当试样B的拉伸应变为65.3%时,传感器的电阻率达到了2.08Ω·m;当试样C的拉伸应变为9.2%时,传感器的电阻率达到了2.53Ω·m.由传感器的电阻率和拉伸应变曲线可知,在相同的试验条件下,试样B兼具了较高的灵敏度和较大的极限拉伸应变,而灵敏度和极限拉伸应变是衡量网格传感器的重要指标,Ag-Graphene-Ecoflex网格传感器在这两方面都优于另外两种网格传感器,因此,综合性能更好.
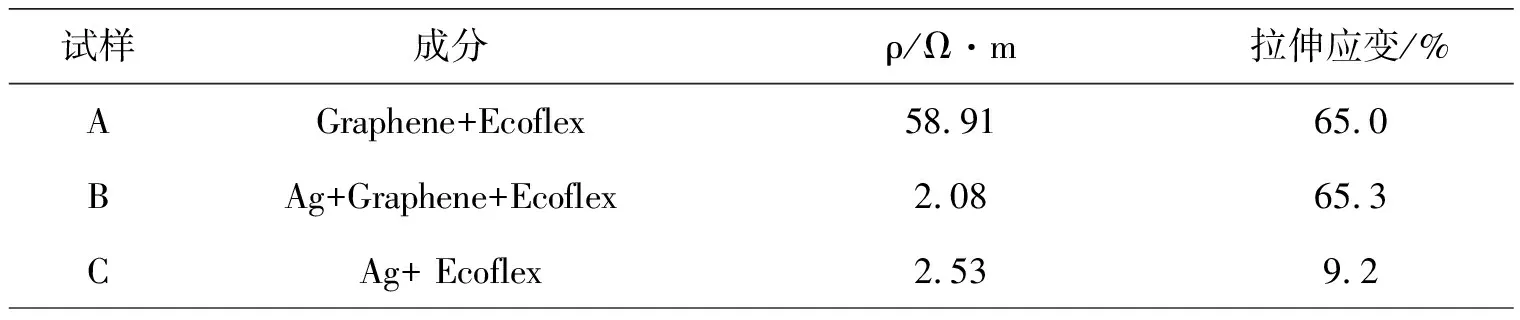
表1 3种样式传感器电阻率与拉伸应变范围
对比市面上在售的柔性应变传感器主要指标,如,宁波韧和科技有限公司的ESSA/B系列柔性应变传感器,拉伸极限为50%,灵敏度为0.05%;大连墨感科技的Q22系列柔性可拉伸薄膜传感器,拉伸极限为50%,灵敏度为0.20%,而本文研制的应变传感器拉伸极限和灵敏度分别达到65.3%和0.30%,均高于以上两种传感器,结果表明,Ag-Graphene-Ecoflex网格应变传感器兼具高灵敏度和宽检测量程的优点.
3 实际应用
3.1 单通道传感器应用

(a-d)为手腕弯曲图;(e)为非连续弯曲角度下的信号响应曲线;(f)为手腕由0°到70°连续弯曲信号响应曲线图4 检测人体活动关节的运动情况
根据Ag-Graphene-Ecoflex柔性应变传感器的高灵敏度和宽检测量程的特性,可检测人体活动关节的运动,如图4(a-d)所示.为了检测手腕弯曲的角度,可将该传感器紧固在人体手腕活动关节处.如图4(e)所示,弯曲手腕关节的角度分别为20°、50°、70°时,随着传感器的拉伸形变量不断增大,传感器的电阻变化率也相应变化.如图4(f)所示,传感器能够快速响应手腕从0°到70°的弯曲动作,并且在反复伸直弯曲时,信号变化一致,说明传感器具有良好的重复稳定性.因此,这类传感器适合用于检测和反馈人体活动关节的运动变形.
3.2 多通道传感器应用
在柔性应变传感器的诸多应用领域中,手势识别作为一个研究热点受到广泛的关注.根据上文对Ag-Graphene-Ecoflex网格传感器特性的研究,利用其高灵敏度的特性,设计了一个多通道手势识别传感系统,其中识别步骤包括搭建电路、采集与处理数据、提取与分析特征、搭建识别程序与设计识别算法、验证识别装置准确度和传输显示识别结果.该系统主要由Ag-Graphene-Ecoflex网格传感器、多通道数据采集模块(单片机ADC)、数据传输模块(蓝牙)和OLED识别结果显示终端组成,利用单片机的模拟数字转换器(ADC)实现对传感器拉伸信号到电信号的转化,用于判断人体手势动作.由于传感器电阻值较大,所采集到的电压信号微弱,故本文利用运算放大器搭建了运算放大电路,将所采集的模拟信号先放大,再输出至单片机ADC口进行模数转换.
本文将5个Ag-Graphene-Ecoflex网格传感器固定在手指关节处,该系统选用3个手势分别为“Love”“Victory”和“OK”作为识别对象.该传感系统中,当手指弯曲使得传感器弯曲时,引起网格传感器中的银网格发生断裂,导致电阻骤增,根据公式Vin=Vcc×R3/(Rs+R3),Vout=Vi(1+R2/R1),故当传感器阻值Rs增大时,送入单片机ADC的电压Vout会变小.为了适应不同传感器个体差异,在识别前先对电压信号进行归一化处理并将结果扩大100倍,将阻值变化所引起的电压变换的数字量变化范围限定在1~100之间.如图5所示,以“Five”手势作为初始状态手势,分别做出3种手势“Love”“Victory”和“OK”时,分析由单片机发送到上位机的电压信号,发现其随着手指关节弯曲表现出较为突出的特征,利用此特征设计并完善识别算法,即可完成3种手势的高精度识别.

(a-c)为3种手势OLED显示结果;(d-f)为手势识别信号曲线;(g-i)为不同手势实物图图5 3种手势的高精度识别
4 结语
第一,使用Solidworks并结合3D打印技术设计传感器模具,通过反倒模具法制备出了3种不同复合功能材料的网格柔性应变传感器:Graphene-Ecoflex网格柔性应变传感器、Ag-Ecoflex网格柔性应变传感器、Ag-Graphene-Ecoflex网格柔性应变传感器.
第二,采用拉伸仪测试了3种不同网格传感器的拉伸应变范围和灵敏度,结果表明,Ag-Graphene-Ecoflex传感器的综合性能更加优越.
第三,单个传感器的实际应用:Ag-Graphene-Ecoflex网格柔性应变传感器可用于检测不同手腕弯曲角度.
第四,多通道传感器的实际应用:基于多个Ag-Graphene-Ecoflex网格柔性应变传感器,实现了“Love”“Victory”和“OK”手势信号的识别,完成了系统的设计与演示.
