空间站机械臂末端执行器维修系统设计与验证
2023-11-18朱超张文明胡成威唐自新梁常春孔旭李德伦王友渔曾磊张昕蕊
朱超,张文明,胡成威,唐自新,梁常春,孔旭,李德伦,王友渔,曾磊,张昕蕊
北京空间飞行器总体设计部 空间智能机器人系统技术与应用北京市重点实验室,北京 100094
1 引言
随着中国空间站建造阶段的开展,航天员出舱活动将成为实现复杂空间操作的重要手段。空间站机械臂主要用于保障空间站在轨组装建造及运营的安全可靠,执行多个重要任务包括舱外巡检、舱段转位、维护维修、辅助航天员舱外活动等,是保障空间站建设与维护的关键设备。为满足在复杂空间环境下重复作业的可靠和寿命需求,必须考虑空间站机械臂在轨维修。
末端执行器是空间站机械臂的核心部件之一,承担着机械臂末端抓取与释放,实现与操作目标电、气连接的重要功能。一旦末端执行器出现故障,整个空间站机械臂难以发挥其作用。调研显示国际空间站于2015-2017年对加大拿臂Canadarm2的腕末端执行器进行了润滑维护和维修更换,保障了整个国际空间站的组装建造[1-2]。
调研显示目前国内还没有针对机械臂维修的系统性研究,本文针对空间站机械臂末端执行器的维修系统方案与验证方法进行了研究,首次提出了末端执行器维修及验证方案,并进行了试验验证,可作为空间站机械臂在轨维修设计工作的参考。
2 末端执行器简介
末端执行器是空间站机械臂的核心部件之一,能够实现对合作目标捕获锁定以及释放等动作,最终实现对目标的重复抓取。它是空间站机械臂开展空间舱段转位与二次对接、仪器设备转移与安装、辅助航天员作业、爬行、大小臂组合等任务的关键部件。末端执行器主要由捕获组件、拖动组件、锁紧组件、壳体组件、六维力传器和快速连接装置等部分组成,参见图1。其与机械臂关节通过快速连接装置连接,可由航天员在轨进行更换。
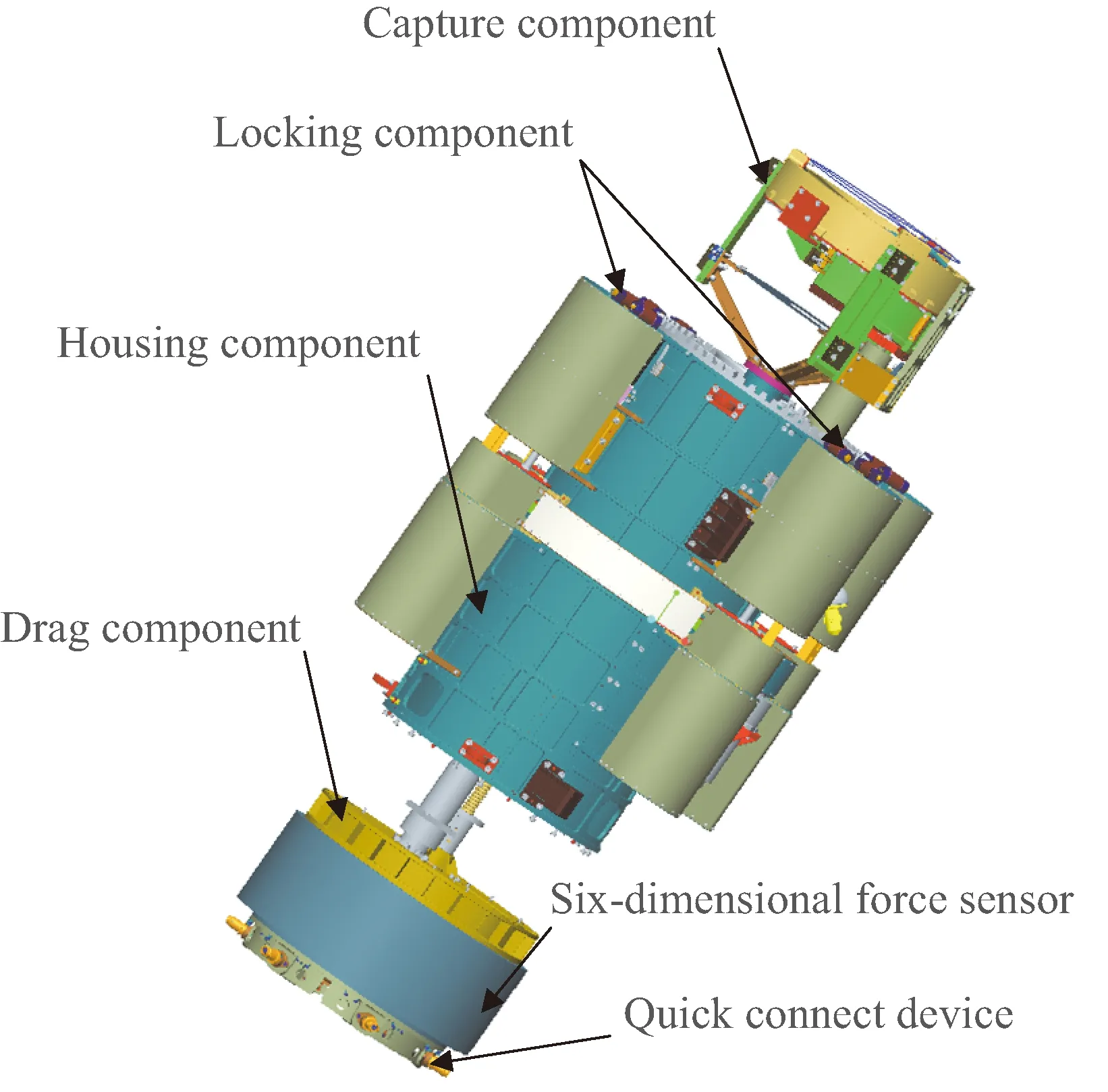
图1 末端执行器组成示意Fig.1 The end-effector model composition diagram
末端执行器工作时,首先由捕获组件工作实现对被抓取目标的初始捕获;然后拖动组件工作,将被抓取目标及捕获组件一起沿轴向拖动,使目标与末端执行器对接,依靠其与末端执行器的配合,消除俯仰、偏航以及转动3个方向上的误差,实现目标与末端的精确对接;接着,4个锁紧组件沿轴向同步运动,在对接面上施加预载荷,并实现与目标的电连接,完成末端抓取过程。释放时,首先锁紧组件反向转动,使得末端执行器与目标断开电连接,并释放二者界面的锁紧力;然后拖动组件和捕获组件工作,回到初始位置,完成释放动作。
如果机械臂末端执行器在轨发生故障,经故障处置仍无法继续工作时,需要视情况择机开展在轨维修工作。
3 末端执行器维修系统方案
3.1 维修总体方案
维修任务启动后,需要四方进行协同作业,其中2名航天员出舱、1名航天员舱内协同配合,地面人员监视并指导。维修准备阶段,需要将故障机械臂转换成指定的维修构型,在指定区域采用小机械臂辅助开展故障维修任务[3-8],如图2所示。整个维修任务分3次出舱依次完成对应工作,具体的维修任务规划如图3所示。

图2 机械臂末端执行器维修构型Fig.2 Maintenance configuration of space manipulator end-effector
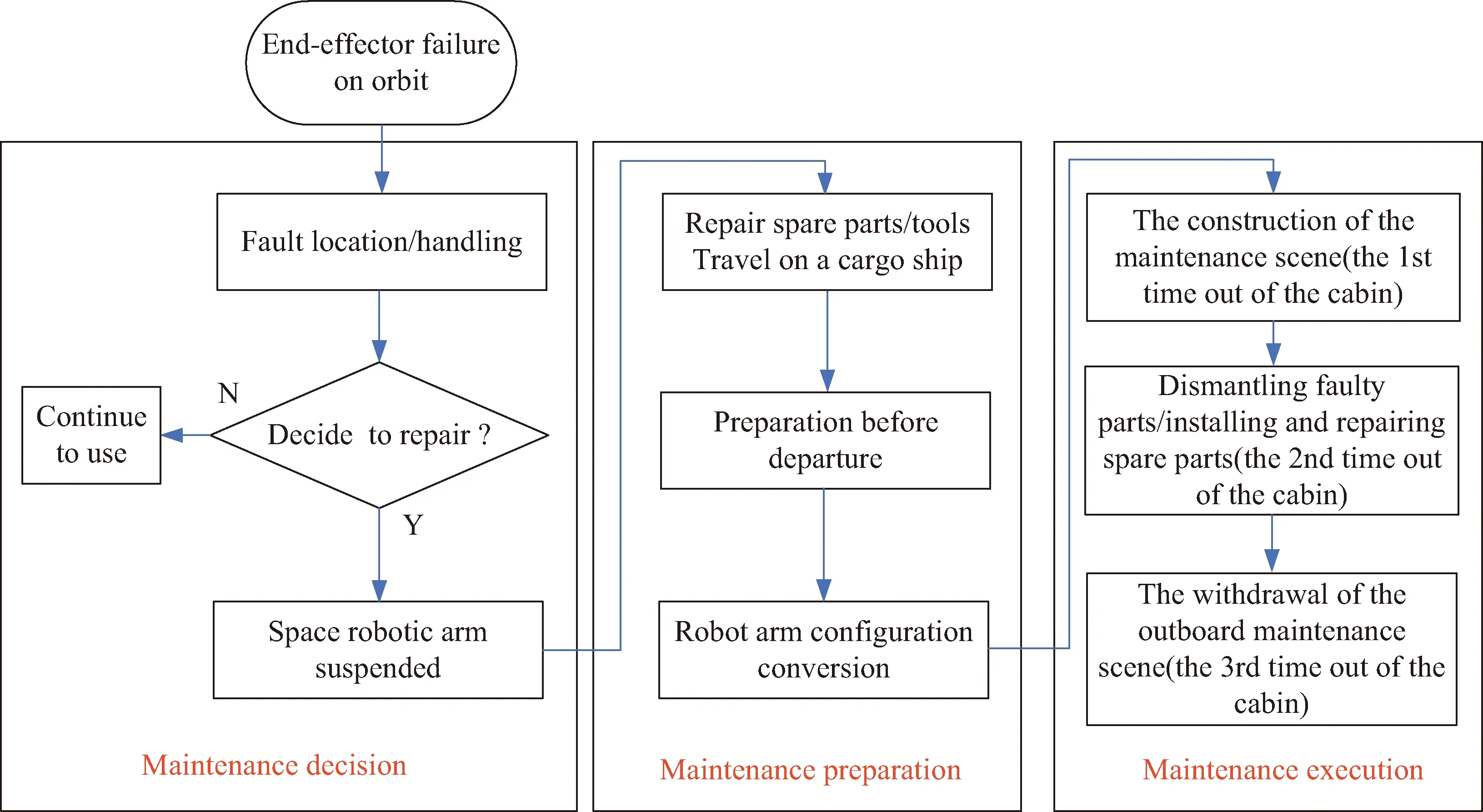
图3 机械臂末端执行器维修任务规划Fig.3 Maintenance planning of space manipulator end-effector
第1次出舱任务,空间站机械臂分别携带航天员和维修工具、维修备件到达指定维修作业点,通过舱壁上安装的脚限位器和舱外操作台进行临时固定,完成维修前的工作场景搭建。第2次出舱任务,采用小机械臂辅助将2名航天员转移至机械臂末端执行器故障件两侧,利用第一次出舱的维修工具和维修备件拆卸末端执行器故障件,完成后安装备件。第3次出舱任务,由航天员拆除维修场景,将末端执行器故障件、维修工具、维修设备等带回舱内进行存储,最终完成一次完整末端执行器的维修任务,见表1。

表1 机械臂末端执行器的维修出舱任务清单Table 1 Mission planning for maintenance of space manipulator end-effector
3.2 故障处置
空间站机械臂末端执行器故障主要包括通信异常、机构卡滞、供电异常、热控异常、软件异常等多种类型。对于不同故障,需要根据当前任务情况采用统一的处置策略。
机械臂执行任务时,若末端执行器出现故障,首先暂停任务,再根据产品故障类别采取处置对策,进行故障定位、分析等工作。若发现处置后无法恢复正常,则需决策开展机械臂末端执行器在轨维修,快速切换至备份控制器或降额使用,控制机械臂运动至维修构型,然后按照预先规划的出舱流程开展航天员舱外的维修工作。
3.3 维修策略
机械臂末端执行器产品均为模块化设计,末端执行器在整臂上的布局如图4所示,肩部布置一个,腕部布置一个,这样的布局有利于机械臂在舱表上的爬行。当空间站机械臂末端执行器出现故障时,由于内部无法进行维修,采用整机维修的策略;同时出现故障具有随机性,机械臂末端执行器维修周期主要根据故障情况而定。当2个末端执行器同时出现故障时,根据重要程度依次从肩部末端执行器、腕部末端执行器开展相应维修任务。
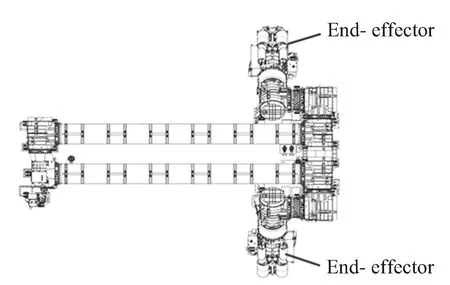
图4 机械臂末端执行器布局示意Fig.4 Modular end-effector of space manipulator
3.4 维修接口设计
机械臂末端执行器与相邻关节主要通过统一结构的快速连接装置进行连接,这样的设计可以有利于减少维修用专用工装的种类及数量。想要实现该快速连接装置的分离,就需要利用维修工具完成对其快速进行机械分离和电连接器的分离。为了方便分离,在快速连接装置上设计有通用的维修工具接口,如图5所示,航天员在舱外可以快速进行安装工具操作及分离快速连接装置操作。

图5 机械臂末端执行器维修接口Fig.5 Maintainability interface of space manipulator end-effector
3.5 维修工具设计
在维修机械臂末端执行器过程中,维修工具成为至关重要的一个环节。其好坏直接决定着任务成败。维修工具不仅要实现故障件的分离和备件的安装,还有一个难点,就是要维持整臂的姿态,这对维修工具设计提出了很大的挑战。
空间站机械臂末端执行器的维修工具包括通用的舱外电动工具、专用维修装置、专用膨胀螺栓拆卸工具,如图6所示。
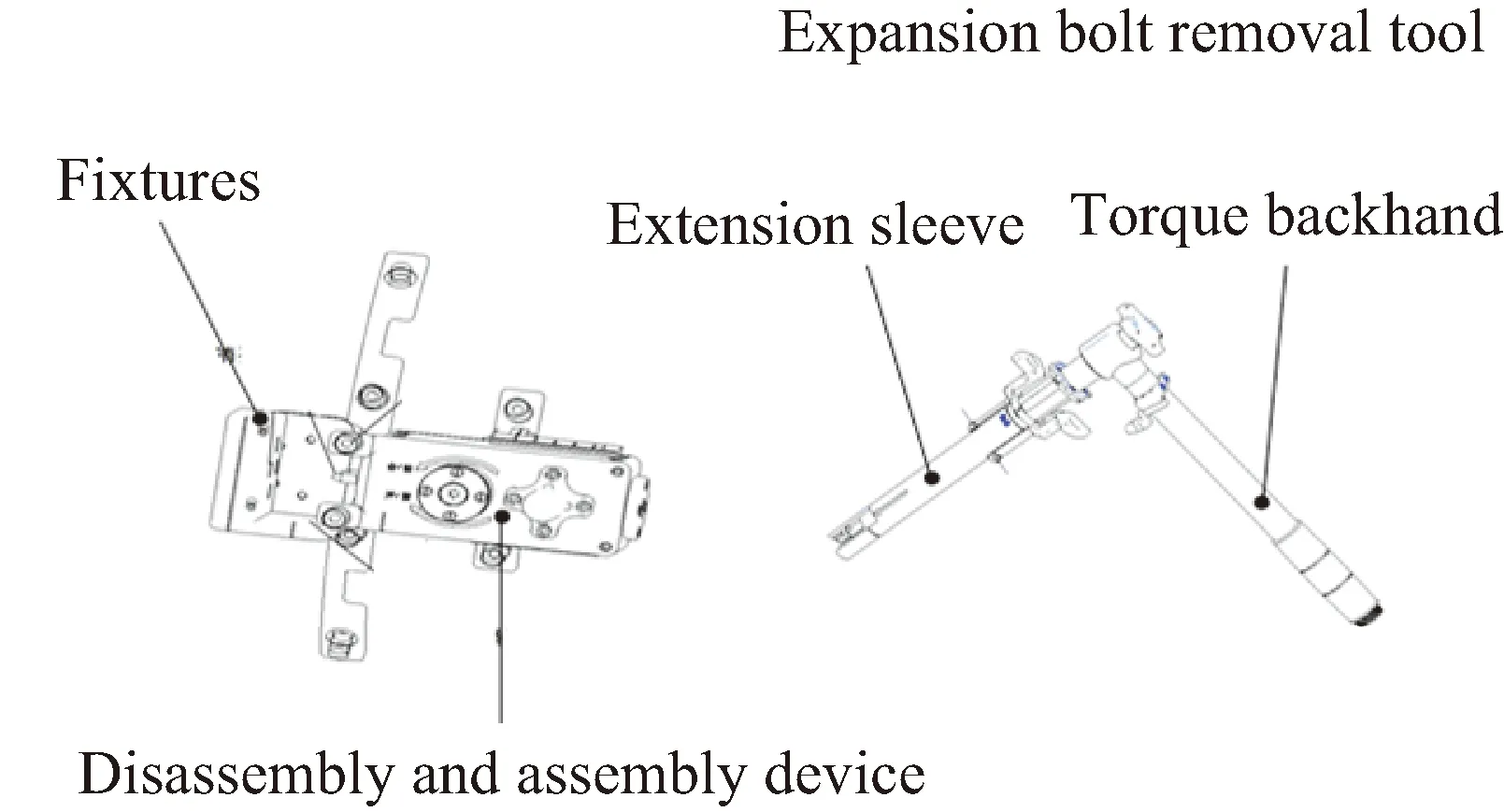
图6 末端执行器维修专用工具Fig.6 Special tools for end-effector
专用维修装置采用模块化设计,利用维修接口可以安装在快速连接装置上任一个角度,主要分固定装置和拆装装置两大部分,可以实现故障的机械臂末端执行器ORU沿着两个垂直方向的分离与对接。其中固定装置主要连接在相邻关节上,而拆装装置则可以通过舱外通用电动工具驱动,利用内部机构实行横向分离和对接。
专用膨胀螺栓拆卸工具,主要功能是将快速连接装置上的6颗膨胀螺栓进行快速拆卸和安装,在这个过程中需要保证拆卸的膨胀螺栓不会飘离,并且有明显的力反馈效果。
3.6 维修备件热控设计
为保证空间站末端执行器维修备件出舱后的温度,需要采取热控措施,保证维修备件出舱后可以维持至少3天的工作温度。
为了解决这一难题,首先在舱体维修区域设置有供电电缆,为维修备件供电提供接口,如图7所示。然后通过末端执行器上的航天员可操作接插件,将供电电源与末端执行器上的2路温度继电器加热通路连接,如图8所示提供并联的供电通路,对维修备件进行主动热控,最终满足备件在轨储存温度要求。

图7 机械臂末端执行器供电电缆Fig.7 Power supply cable of space manipulator end-effector

图8 机械臂末端执行器保温措施Fig.8 Thermal insulation measures of space manipulator end-effector
4 末端执行器维修验证
4.1 维修验证规划
为了在地面更好地获取维修过程的重要数据并验证末端执行器维修方案和流程可行性,开展了维修验证规划,包括维修仿真验证、气浮及悬吊零重力验证、维修着服验证、中性水槽试验,其中维修仿真主要对备件出舱、场景搭建、维修操作以及故障件回舱进行验证;气浮悬吊验证维修操作进行验证;着服试验主要验证工具组装和维修操作;中性水槽试验主要对备件出舱、场景搭建、维修操作、故障件回舱等项目进行验证。因此,通过4种验证手段对机械臂末端执行器维修全过程进行覆盖验证[9-10],如表2所示。
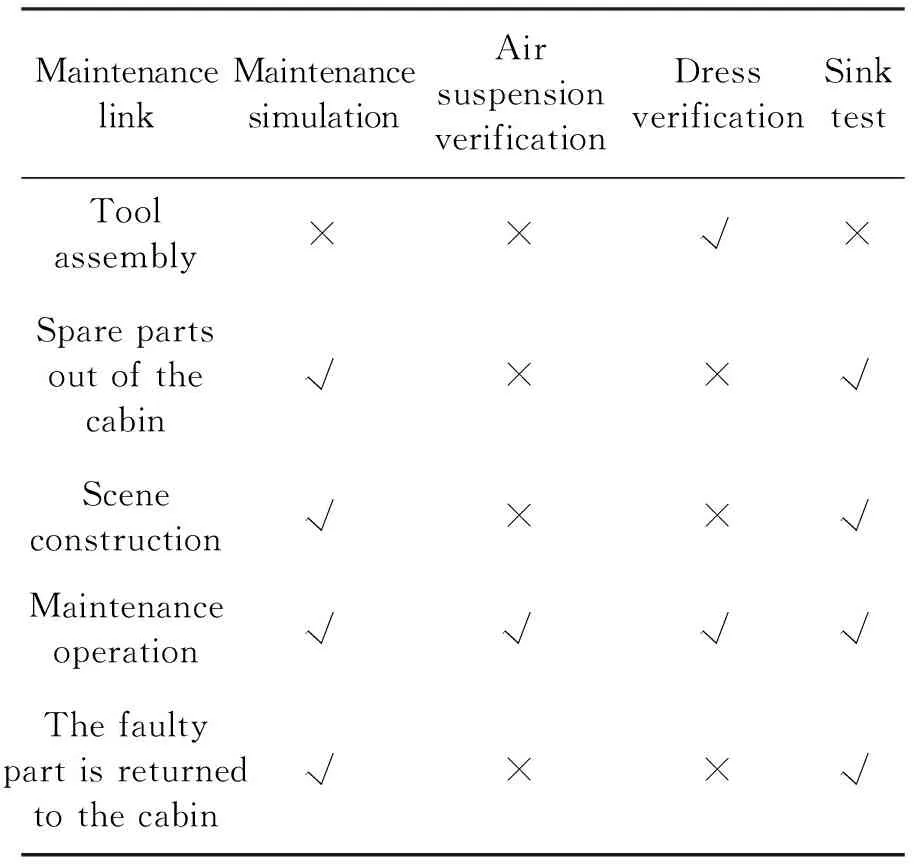
表2 机械臂末端执行器的维修验证规划Table 2 Maintainability verification planning
4.2 维修仿真
依据机械臂末端执行器出舱任务规划进行详细的流程设计,并对每步操作进行维修指标的分配,比如可达性、操作力、操作空间、可视性、操作反馈、防飘、防误、操作标识等指标。
采用研制的维修系统级仿真软件首先对空间站、机械臂、航天员、维修工具等模型进行简化,通过相对位置关系构建出末端执行器维修虚拟场景,并针对机械臂末端执行器ORU维修中的典型操作,比如膨胀螺栓拆卸、维修装置拆装等进行详细的可达性、可视性等仿真分析[11-12],如图9所示。
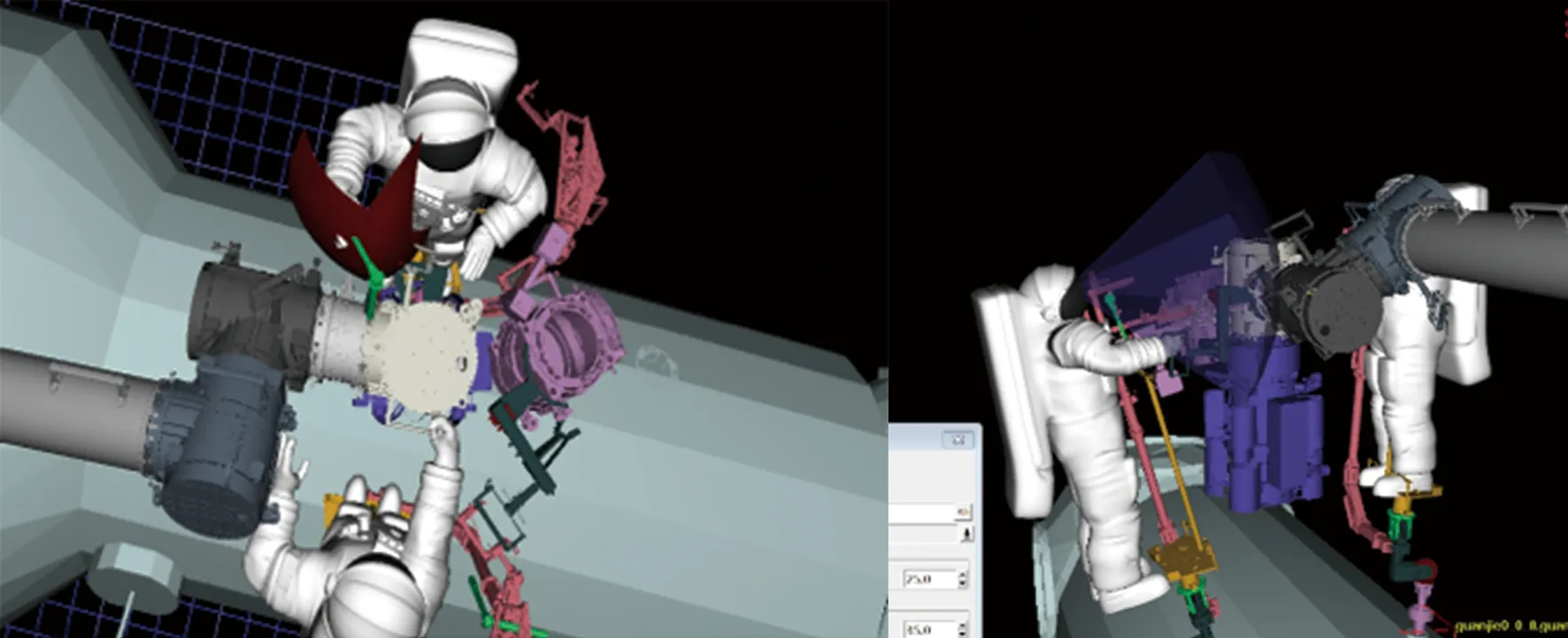
图9 机械臂末端执行器维修具体操作仿真Fig.9 Maintenance operation simulation of space manipulator end-effector
仿真结果表明,航天员进行膨胀螺栓拆卸时会出现视场遮挡、局部位置不可达情况,因此通过优化维修构型,并采用小机械臂辅助移动解决,对于航天员操作更加灵活方便,最终膨胀螺栓拆装等操作均可满足航天员操作要求,验证了整个维修任务中关键操作的可行性,如图10所示。
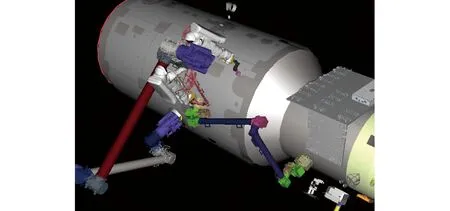
图10 机械臂末端执行器维修构型仿真Fig.10 Maintenance configuation of space manipulator end-effector
4.3 气浮悬吊维修验证
考虑机械臂维修的特殊性,采用气悬浮微重力和悬吊系统相结合的方案开展地面维修场景的搭建和验证[13]。
采用气悬浮微重力方案对末端和回转ORU进行重力的消除,采用悬吊方案对其他有干扰的关节进行重力卸载,如图11所示。末端和回转ORU下方各安装一个气浮零重力工装,两名操作人员分别站立在两侧采用通用扶手、舱外电动工具、维修装置等进行维修操作。当航天员操作维修装置将关节与末端分离时,末端沿着拆除方向进行运动。
机械臂末端故障时,结合地面试验环境按照真实在轨流程,开展地面试验验证,包括工具准备,操作空间确认,便携式安全带固定,热控多层操作,不同膨胀螺栓操作,维修装置安装定位,关节转动,末端分离与对接等:
通过气浮悬吊试验发现操作过程中热控多层与操作面干涉、双人操作时缺少扶手辅助、工具上无到位刻线反馈、工具分离时刚度不够容易变形、电动工具与维修装置接口容易拧花等问题。因此通过改进热控多层,增加产品扶手,改进工具设计等方式对产品维修性设计进行了优化。
4.4 着服悬吊维修验证
为进一步验证维修系统方案的正确性,在地面开展了着服悬吊试验验证。模拟在轨真实操作,对机械臂末端执行器真实在轨维修流程进行验证[14]。
利用末端执行器模拟件搭建维修场景,采用工装对末端执行器和关节进行重力卸载,如图12所示。试验时,人员着服后站于两侧的模拟脚限位器上,对维修的末端执行器进行挂置便携式安全带,拧松/紧膨胀螺栓,分离/对接末端执行器,安装/拆卸维修装置,测试末端执行器,安装维修备件等操作。

图12 维修末端执行器地面验证场景Fig.12 Maintenance verification scenario of end-effector
机械臂末端执行器通过地面维修试验验证,如图13所示,按照不合项次数由多到少统计,依次为标识、操作空间、可达、操作反馈、防误、物品重量、操作力、防漂离。其中标识、操作空间、可达性、操作反馈等指标不合格项居多。针对末端执行器验证不合格项已迭代改进设计,再次开展试验。
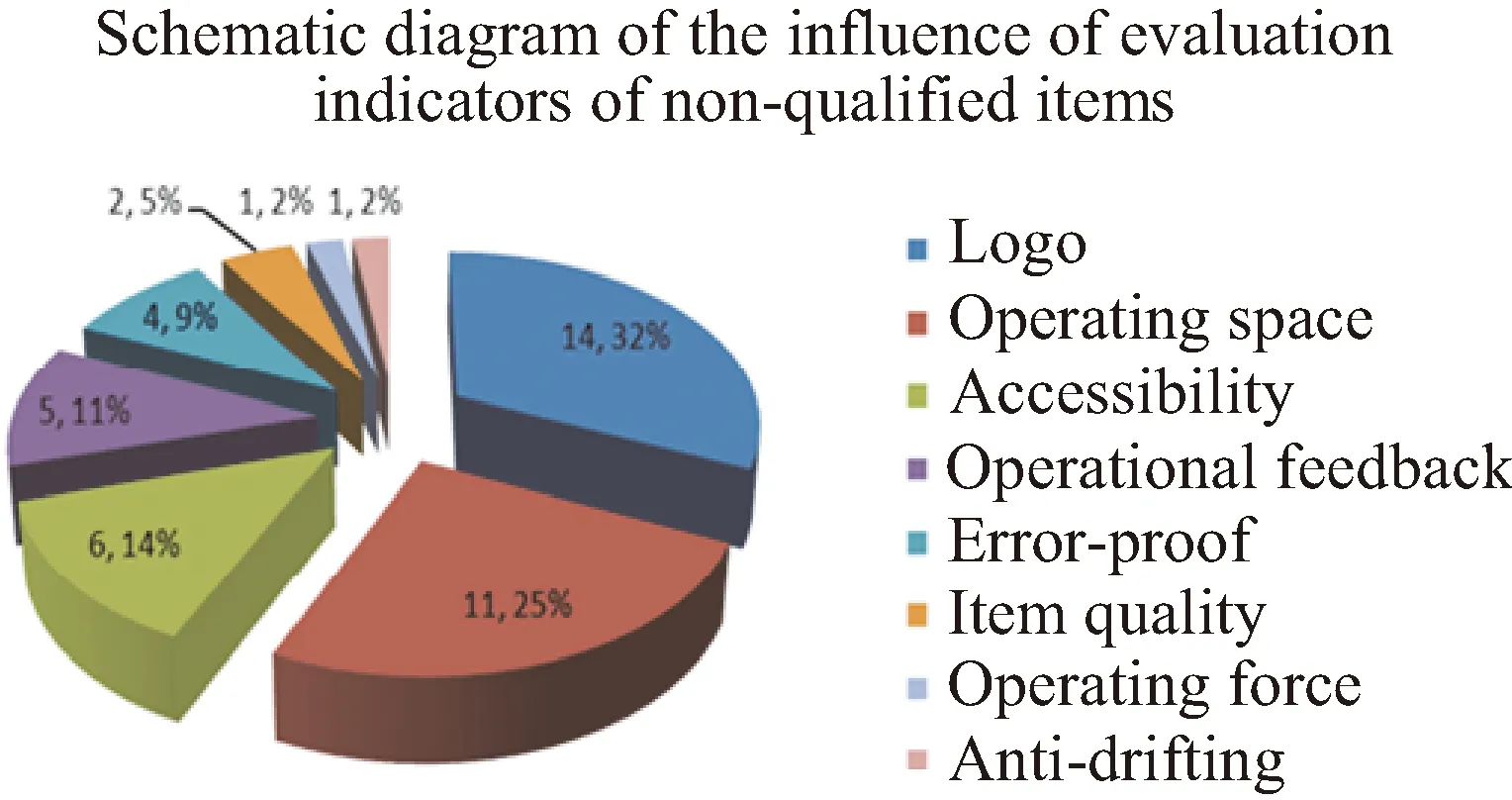
图13 空间站机械臂末端执行器维修不合格项分布Fig.13 Ergonomic evaluation for maintenance of space manipulator end-effector
4.5 水下维修验证
中性水槽试验通过在水下对人和服装实施配重,使得人所受浮力和重力抵消,达到中性浮力的平衡状态,真实模拟航天员在太空失重状态下维修机械臂末端执行器的操作[15]。机械臂末端执行器水下试验主要验证项目包括舱外设备场景的搭建以及大质量大体积设备的转移操作。
采用末端执行器模拟件在水下进行浮力配平,一名航天员站在脚限位器上,另外一名航天员由水下机械臂辅助支持运动,如图14所示,按照相对位姿关系在指定位置完成场景的搭建,包括脚限位器和舱外操作台安装、舱外工具转移及挂置,然后开展末端执行器分离后的转移固定等项目试验。
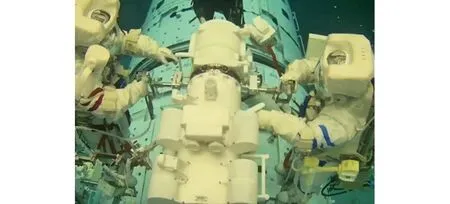
图14 空间站机械臂末端执行器水下试验验证Fig.14 Underwater test verification of space manipulator end-effector
通过上述水下试验,航天员处于中性浮力下对机械臂末端开展维修操作时,可以完成舱外设备场景的搭建以及大质量大体积设备的转移等操作,实现了对机械臂地面悬吊和着服悬吊试验的补充验证,充分验证了机械臂末端维修方案的合理性。
5 结论
通过对国际空间站机械臂末端执行器维修情况的调研,以及中国空间站机械臂末端执行器维修需求的分析,开展了空间站机械臂末端执行器的维修设计与验证,主要结论如下。
1)根据工程实践总结的经验,提出了一种基于多人协同的空间站机械臂末端执行器维修系统方案,包括末端执行器故障后的故障处置、维修策略、维修工具等内容;
2)通过对末端执行器维修性操作进行仿真试验验证,表明改进设计后维修具体操作可视性、可达性、可操作性、安全性均满足要求;
3)本文搭建了末端执行器维修地面验证系统,分别开展了气浮悬吊验证、着服悬吊验证以及水下维修验证,充分验证了机械臂末端执行器维修操作可行性,维修方案合理性以及维修流程正确性。
末端执行器维修系统设计与验证研究成果将为后续空间站机械臂维修工作提供设计借鉴和工程指导。
