船舶触碰事故的贝叶斯网络模型构建及事故原因分析
2023-11-16艾义夺
艾义夺
(上海江南长兴造船有限责任公司,上海 201913)
通过建立贝叶斯网络模型,可以将这些因素作为网络的节点,利用历史数据和专家知识来确定它们之间的概率关系,从而推断事故发生的可能原因。在实际应用中,贝叶斯网络模型可以帮助航运企业、港口管理部门和监管机构等对船舶触碰事故进行风险评估和预防策略制定。
1 构建船舶触碰事故贝叶斯网络模型
1.1 船舶触碰事故贝叶斯网络结构
船舶触碰事故的贝叶斯网络结构包括人员行为不当、船舶条件不良、环境条件不良和管理问题四个主要部分(如图1 所示)。每个部分都是网络中的一个节点,表示可能导致事故发生的特定因素。

图1 船舶触碰故障树
1.1.1 人员行为不当
这个节点代表了船员在船舶操纵和决策过程中的行为[1]。人员行为不当可能包括以下因素:不正确的航行决策、操作错误、缺乏专业知识或培训、疲劳和分心等。该节点与其他节点之间的连接表示不当行为可能导致船舶触碰事故发生的概率。
1.1.2 船舶条件不良
这个节点代表了船舶自身的状态和条件。船舶条件不良可能包括以下因素:机械故障、设备失效、导航系统误差、船只结构受损等。这些因素会增加触碰事故发生的风险。该节点与其他节点之间的连接,表示船舶条件不良可能对事故发生的影响。
1.1.3 环境条件不良
该节点代表了海洋或水路的环境条件。环境条件不良可能包括以下因素:恶劣天气、能见度差、海洋潮流和浪涌等。这些因素会增加船舶触碰事故的风险。
1.1.4 管理出现问题
每个节点之间的连接表示不同因素之间的概率关系。模型可以根据历史数据和专家知识来确定这些概率值,从而推断事故发生的可能原因。例如,如果糟糕的环境条件和人员行为不当的概率都很高,那么船舶触碰事故发生的概率也会增加(如图2 所示)。
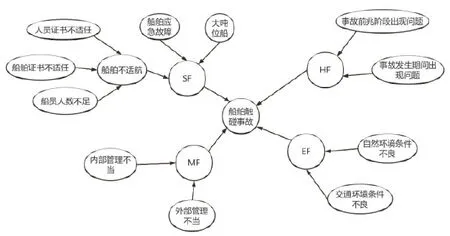
图2 船舶触碰事故贝叶斯网络结构
1.2 构建贝叶斯网络
1.2.1 收集数据
首先,需要收集与船舶触碰事故相关的数据。这些数据可以包括历史事故报告、调查报告、船舶设备维护记录、船员培训记录、环境数据等。数据的质量和数量对于构建准确的贝叶斯网络至关重要。
1.2.2 确定变量
根据所收集的数据,确定影响船舶触碰事故的各个变量[2]。根据题目要求,主要的变量包括人员行为不当、船舶条件不良、环境条件不良和管理出现问题。针对每个变量,进一步细化其子变量以便更加详细地建模。
1.2.3 构建网络结构
使用Netica 软件,创建新的贝叶斯网络项目,并根据确定的变量构建网络结构。在Netica 中,可以通过图形界面进行节点和连接的添加。每个变量对应一个节点,节点之间的连接表示变量之间的关系。
1.2.4 设定节点属性和概率表
为每个节点设置相应的属性和概率表。节点属性包括名称、类型和说明。概率表用于描述每个节点的条件概率分布。概率表可以根据收集的数据、领域专家知识或模拟方法来确定。应尽量使用准确的数据和专业知识,确保贝叶斯网络的可靠性。
1.2.5 设置节点之间的连接
根据变量之间的关系,设置节点之间的连接。连接可以是直接连接,也可以是通过其他节点进行传递。Netica 软件提供了直观的图形界面,可以轻松设置和调整节点之间的连接。
1.2.6 验证和调整网络
完成网络结构和概率表的设置后,需要进行验证和调整。使用已有的数据集对贝叶斯网络进行测试,并与实际数据进行比较,以评估网络模型的准确性。如果发现网络模型存在问题,可以通过添加更多的数据、重新设定节点的概率表或修改网络结构来进行调整和改进。
1.2.7 进行推理和预测
在完成网络验证和调整后,可以利用贝叶斯网络进行推理和预测。通过输入特定的观察值或变量值,可以计算出其他变量的概率分布。这样可以得到关于船舶触碰事故可能原因的推断和预测结果。同时,还可以通过Netica 软件提供的图形界面进行结果可视化,以便更好地理解和解释网络的输出。
2 船舶触碰事故致因分析
2.1 触碰事故致因分析
研究人员为分析船舶触碰事故原因,在引入贝叶斯公式的基础上,对各种致因元素出现的概率进行求解:
基于该公式,船舶触碰事故致因的分析过程可分为以下七个步骤:
2.1.1 确定贝叶斯网络模型
2.1.2 收集观测数据
在进行推理之前,我们需要收集一些观测数据作为已知条件。观测数据是指在实际情况中获得的、与所要推断的变量相关的信息[3]。
2.1.3 设置观测节点
在贝叶斯网络模型中,我们需要将收集到的观测数据应用到相应的节点上。这些节点称为观测节点,它们的状态已知,作为推理的起点。在此过程中,研究人员引入条件概率公式,该公式能够推导一个事件在另一个事件发生的条件下的概率。在贝叶斯网络推理中,条件概率用于计算节点之间的依赖关系。其公式为:
2.1.4 进行前向推理
通过给定的观测节点,我们可以使用贝叶斯网络的前向推理算法来计算其他未知节点的概率。前向推理是从观测节点开始,逐步向目标变量进行推理的过程。
首先,我们需要对观测节点设置相应的值。这些值可以是具体的数值,也可以是模糊的状态(如高、中、低)。
其次,我们从网络中的根节点开始,根据已知观测节点计算子节点的条件概率分布。这些条件概率分布描述了节点与其父节点之间的依赖关系[4]。
再次,根据已知观测节点和计算得到的条件概率分布,我们可以计算下一层节点的条件概率分布。这个过程会一直持续下去,直到到达目标变量。
最后,当到达目标变量时,我们可以通过累积所有路径上的概率来计算目标变量的边际概率分布。这个分布表示了目标变量各个取值的概率。
2.1.5 进行后向推理
除了前向推理之外,我们还可以使用贝叶斯网络的后向推理算法来计算已知目标变量情况下其他变量的概率。后向推理是从目标变量开始,逐步向观测节点进行推理的过程。
首先,我们需要对目标变量设置相应的值,即已知的观测节点。
其次,我们从网络中的子节点开始,根据已知目标变量计算父节点的条件概率分布。
再次,根据已知目标变量和计算得到的条件概率分布,我们可以计算上一层节点的条件概率分布。这个过程会一直持续下去,直到达到观测节点。
最后,当到达观测节点时,我们可以通过累积所有路径上的概率来计算观测节点的边际概率分布。这个分布表示了观测节点各个取值的概率。
2.1.6 进行参数学习与模型更新
在实际应用中,我们可能需要根据新的观测数据对贝叶斯网络模型进行参数学习与更新。参数学习是指利用观测数据来估计贝叶斯网络模型中的条件概率表。通过学习到的参数,可以更准确地进行推理。其公式为:
2.1.7 进行推理结果评估与解释
通过观察概率分布、计算期望值等方法来评估推理结果的准确性和可靠性。同时,需要将推理结果与实际情况进行解释,提供有意义的结论和建议。
2.2 致因分析
本次研究中使用局部分析作为灵敏度分析手段,并对触碰事故节点发生状态进行不同输入参数值的采样,使用各节点后验概率值的方差来衡量灵敏度大小。通过分析SF、HF、EF、MF 四大因素,研究人员对船舶触碰故障致因进行总结:
船舶触碰事故是航运领域中常见的事故类型之一,通常由多个因素共同作用引起。在进行致因分析时,可以从人员行为不当、船舶条件不良、环境条件不良和管理出现问题四个方面入手,以深入探究船舶触碰事故的潜在原因[5]。
2.2.1 人员行为不当
人员行为不当是船舶触碰事故中最为常见的致因之一。它涉及船员的技能水平、专业素养以及对安全操作规程的遵守情况。以下是可能导致船舶触碰事故的相关人员行为不当:
(1)疏忽驾驶:船员未能始终保持集中注意力,或存在疲劳驾驶情况,导致未能及时发现潜在危险或采取适当的措施。
(2)操纵错误:船员在操作船舶的过程中,可能存在操纵错误的情况,如误操作操纵设备、舵机操作不当等。
(3)通信失误:船员之间的沟通存在问题,导致信息传递不畅或存在误解,进而影响船舶的操纵和决策。
2.2.2 船舶条件不良
船舶本身的状态和条件对于船舶触碰事故具有重要影响。以下是可能导致船舶触碰事故的相关船舶条件不良:
(1)设备故障:船舶关键设备(如操纵系统、通讯设备等)存在故障或运行不良,影响到船舶的操纵和监控。
(2)船舶维护不善:船舶的定期维护保养工作未能得到有效执行,导致船舶设备状况下降、船体结构损坏等。
3 结论讨论
本文对船舶触碰事故的贝叶斯网络模型构建及事故原因分析进行了总结。在贝叶斯网络模型构建方面,本文通过确定关键节点、建立节点间的依赖关系,并结合专家经验和历史数据来设定节点的状态和概率值。这样的贝叶斯网络模型可以有效地表达各因素之间的关系,并推断出各节点的后验概率值。通过贝叶斯网络模型进行事故原因分析,可以识别出导致船舶触碰事故的主要因素。
