TMP 折纸防护的双稳态软体机器人1)
2023-11-16李志勇何俊峰文桂林王洪鑫
刘 杰 李志勇 何俊峰 文桂林,2) 王洪鑫 田 阳
* (燕山大学机械工程学院河北省轻质结构设计与制备工艺技术创新中心,河北秦皇岛 066004)
† (广州大学机械与电气工程学院,广州 510006)
引言
传统刚性机器人已经在诸多工程领域发挥了重要的价值,然而,诸如人机交互安全性差、非结构化环境适应能力弱、主体结构笨重等系列问题亟需进一步得到解决.而软体机器人由低杨氏模量和高柔韧性的软体材料构成,具有变形大、轻质、人机交互性好和可在狭小空间作业等优点,有解决上述难题的潜力[1-6].
智能材料驱动和流体驱动是软体机器人的两种有效驱动方式[7-11].智能材料驱动作为一种新型的驱动方式,可以进一步增加软体机器人的集成化和智能化,但也存在精度不足、驱动复杂、控制难度大等问题.气驱动作为流体驱动的一种常见形式,具有结构简单、高功率重量比、较好的顺应性等优点,是目前使用最为广泛的一种软体机器人驱动方式.例如,Shepherd 等[12]较早地利用气体驱动方式研发了一种多步态软体机器人,通过简单的驱动实现了复杂的运动特性.最近,通过融合硬软结构的预扭转管,Oh 等[13]开发了一种新型气动扭转执行器,可以实现类人前臂的功能.然而,现有大多数软体机器人的移动速度较慢,难以满足类如灾区救援等作业环境的时效性.Tang 等[14]开发了一种仿猎豹四足软体机器人,该机器人利用气驱动双稳态系统,实现了快速奔跑的能力.
作为具有快速奔跑能力的软体机器人驱动器,常见的气动人工肌肉[15-17]和流体弹性体驱动器[18-19]在复杂环境中作业时,软体材料很容易被外界物体(如荆棘、碎玻璃等)扎破,致使气路漏气,导致驱动效率降低,甚至无法驱动.为应对该类情形,软体机器人的软体材料需得到有效的防护.考虑到软体机器人的运动特点和功能需求,防护结构需要具备轻质、良好柔韧性、一定刚度和协同大变形的特点.而折纸结构具有质量轻、“刚柔并济”等优点,近年来在机器人、超材料和可展机构等大量领域得到了广泛的创新应用[20-23],是一种潜在的解决方法.因此,根据软体机器人软体结构的几何构型,可在空间数学关系的引导下,通过在预定折痕处次序折叠,将二维薄板结构折叠成三维的软体机器人防护结构[24-25].折纸结构可在软体机器人移动过程中协同变形,实现对软体材料防护的同时,又最大限度地减小对软体机器人运动的影响.
针对上述问题,本文提出一种TMP (Tachi-Miura polyhedron)折纸防护的气动双稳态软体机器人.通过气压驱动越过双稳态系统的能量壁垒,实现软体机器人的快速奔跑,并利用TMP 折纸结构作为软体机器人外壳,为软体机器人提供防护,进一步提升其在复杂非结构化环境的适应能力.提出基于分段常曲率法的TMP 折纸防护软体机器人运动学建模方法,量化运动形态与弯曲角度之间的关系,开展实验验证.制备软体机器人样机,并开展一系列实验测试,证实所提TMP 折纸防护软体机器人的快速运动、抵抗环境破坏能力以及复杂非结构化环境运动能力,以期为灾区救援、星球探索等领域复杂非结构化环境作业机器人的研发提供理论指导.
1 TMP 折纸防护软体机器人设计
1.1 软体机器人结构设计
TMP 折纸防护双稳态软体机器人主要由软体脊柱、TMP 折纸外壳、拉簧、前脚和后脚组成,如图1 所示.软体脊柱中有上、下两个气路腔体,向下腔体中施加气压,可驱动其向上弯曲变形;反之,向下弯曲.通过周期性对上、下腔体施加气压,TMP折纸外壳协同软体脊柱周期性上、下弯曲.
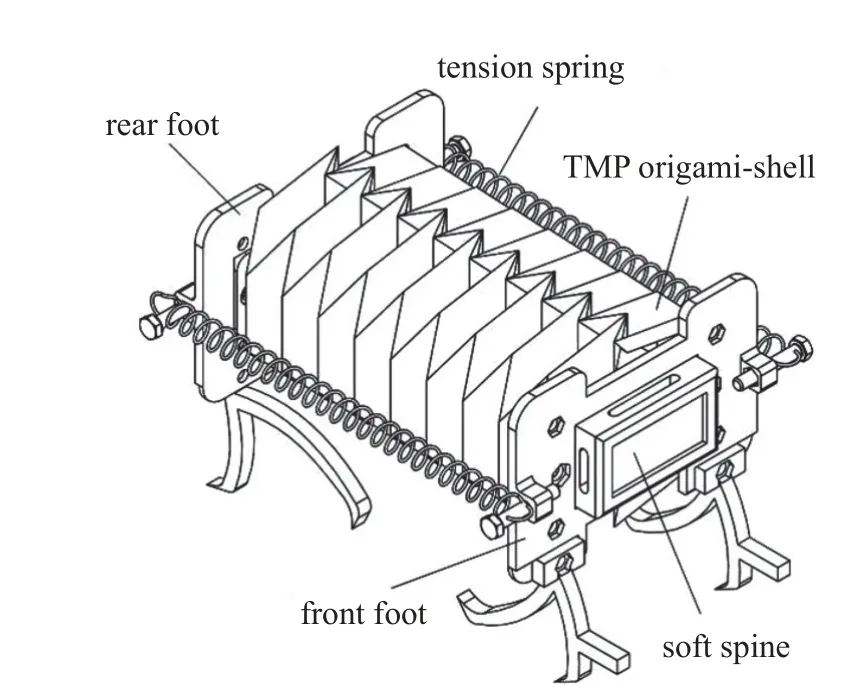
图1 TMP 折纸防护双稳态软体机器人整体结构设计Fig.1 Design of TMP origami-shell reinforced bistable soft robot
软体机器人两侧各有一个拉簧,拉簧的两端固定在前、后脚两侧的螺栓上.拉簧只发生拉伸变形,并与软体脊柱、TMP 折纸外壳共同组成双稳态系统.软体脊柱在周期性气压驱动弯曲变形过程中,拉簧同步周期性快速储存和释放弹性能,释放的弹性能驱动软体机器人形态发生快速变化,为软体机器人的快速奔跑提供辅助动力,从而使软体机器人获得较高瞬时速度.
前、后脚均包括肩部和脚部,如图2 所示,肩部连接软体机器人各部分,脚部通过螺栓与肩部连接并与地面接触,为软体机器人提供支撑力和运动所需的摩擦力.通过设计前、后脚脚部与地面接触角度的不同,使后脚在软体机器人向前运动时起单向锚定作用,为软体机器人向前运动提供有效摩擦力,而前脚仅起支撑作用.
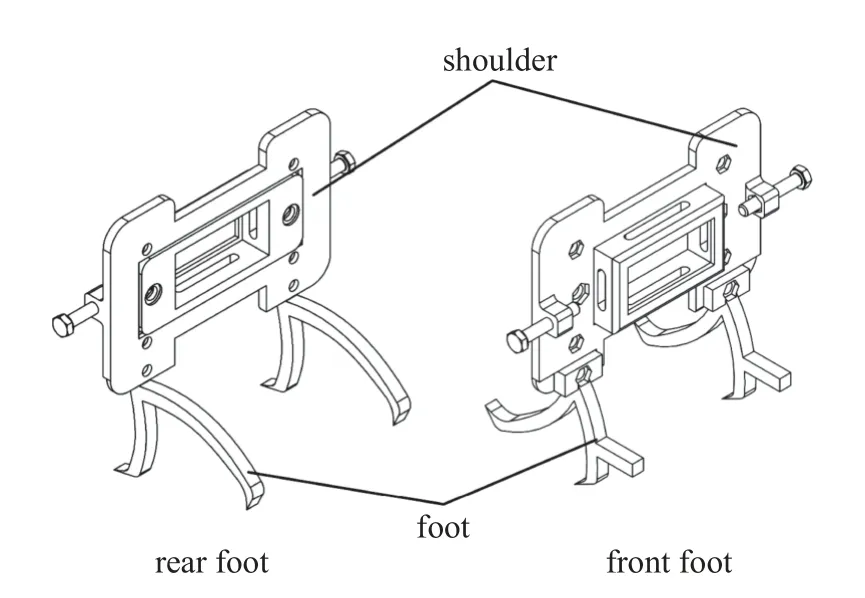
图2 前、后脚结构设计Fig.2 Design of front and rear feet
考虑到软体脊柱及TMP 折纸外壳的协同变形对软体机器人的运动性能起主导地位,因此接下来详述软体脊柱和TMP 折纸外壳的几何设计.
1.2 软体脊柱几何设计
软体脊柱由软体材料组成,内部设有上、下两个截面为矩形的气腔(简称矩形气腔)和柱体局部支撑,如图3 所示.其中,L,W和H分别为软体脊柱外部尺寸的长、宽和高;l和w为矩形气腔的长和宽;a和c为气腔外表面厚度以及上下气腔之间分隔层厚度;D和h为圆柱形气孔的直径和长度;b,d和β分别为柱体头部高度、柱体直径以及柱体扩角;m和n为柱体阵列行数以及列数.矩形气腔通过圆柱形气孔与外界气动装置相连.在矩形气腔内部沿长度方向上周期阵列柱体局部支撑,以约束矩形气腔外壁,在气压较大时缓解其局部失稳变形.柱体局部支撑由头部圆台体和底部圆柱体组成,圆台可在约束较大面积的腔体外壁的前提下为腔体内部留出足够的空间供气体进入.图4 展示了矩形气腔(图4(a))和融合柱体局部支撑的矩形气腔(图4(b))在较大气压下的局部失稳现象,可见,本文所提策略可以有效缓解软体脊柱局部失稳.
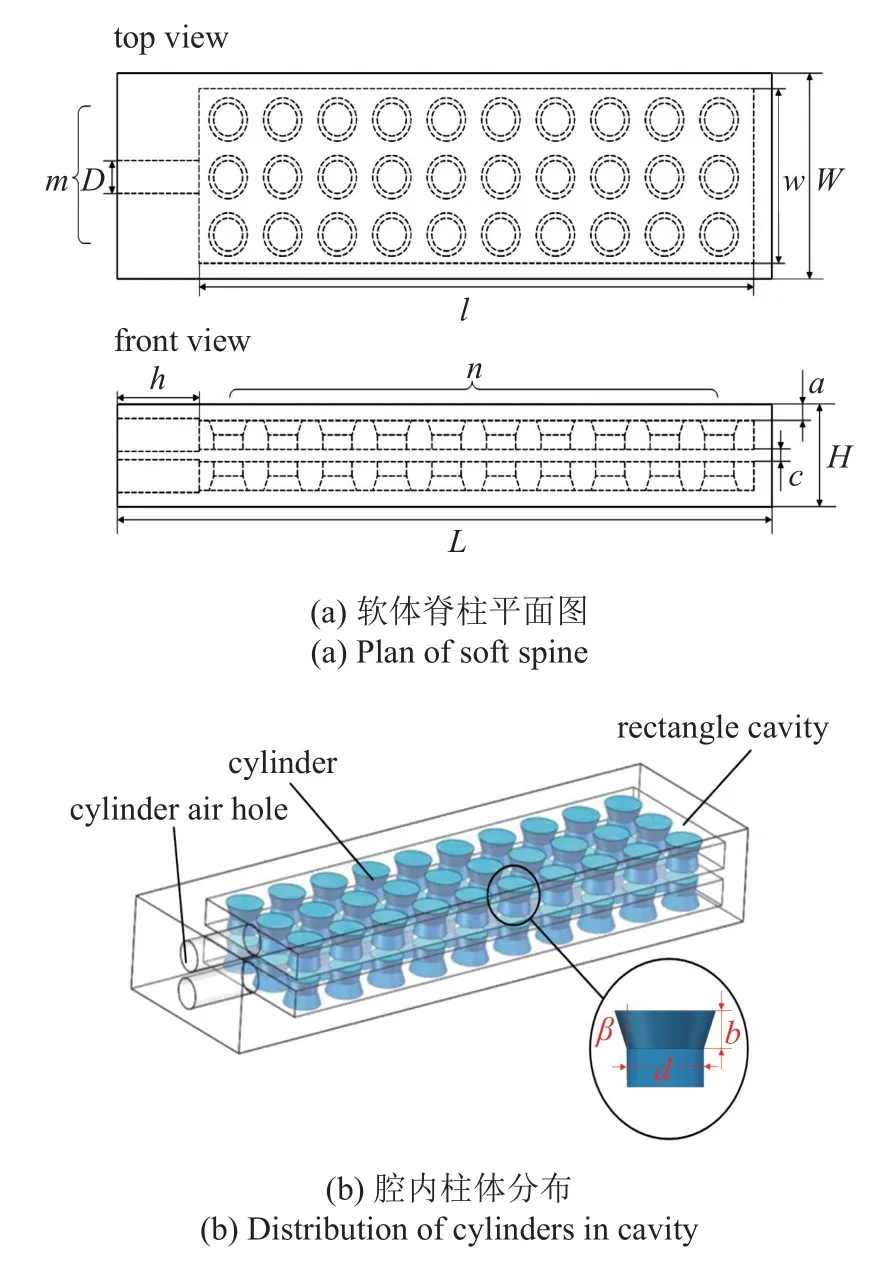
图3 软体脊柱几何设计Fig.3 Design of soft spine
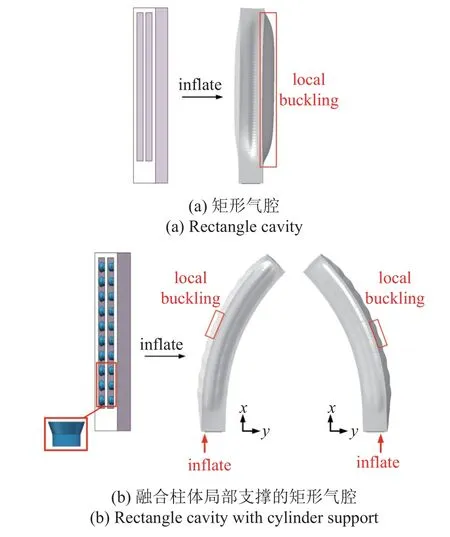
图4 软体脊柱局部失稳问题Fig.4 Local buckling of soft spine
1.3 TMP 折纸外壳几何设计
TMP 折纸外壳由二维折痕图次序折叠后组装而成,如图5 所示.二维单胞(图5(a))在高度方向进行周期阵列,个数为N,形成二维折痕图(图5(b)),二维折痕图在折痕处次序折叠得到TMP 折纸结构,其为TMP 折纸外壳的一半(图5(c)),镜像对称后得到另一半TMP 折纸外壳,将其翻转并将两半连接一起,形成TMP 折纸外壳.其中,lA,lB和lC分别表示二维单胞三条谷折、山折和谷折的长度,lD为二维单胞高度的一半.


图5 TMP 折纸外壳设计: (a)二维单胞;(b)二维折痕图设计;(c)TMP 折纸结构;(d)TMP 折纸外壳Fig.5 Design of TMP origami-shell: (a)2D unit cell;(b)Design of 2D crease pattern;(c)TMP origami structure;(d)TMP origami-shell
2 软体机器人样机制备
2.1 软体脊柱制备
由于硅橡胶具易于成型、耐热性、耐寒性和稳定性等优点,本文采用硅橡胶制备软体脊柱.其制作步骤如图6 所示.
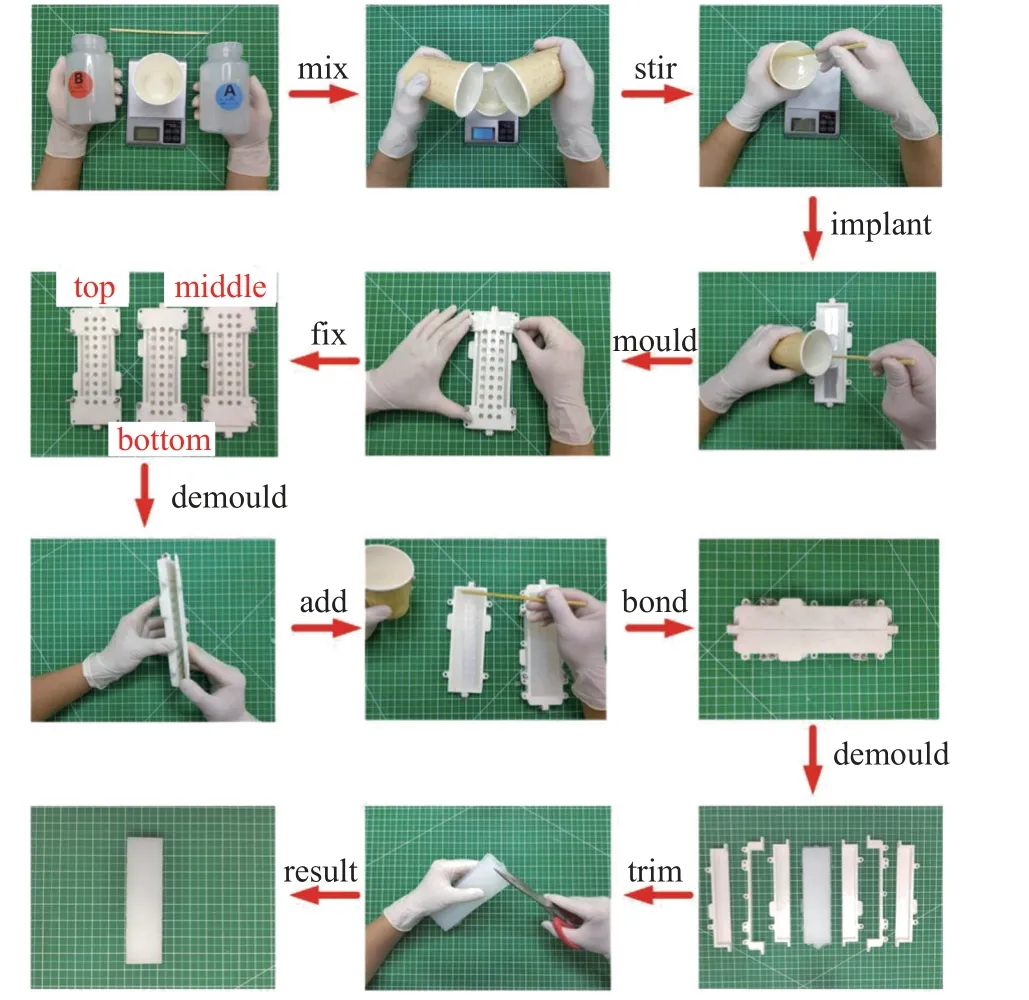
图6 软体脊柱制备流程Fig.6 Preparation process of soft spine
(1)将软体脊柱分为上、中、下3 层.以上腔体内柱体头部圆台体及以上为上层,下腔体内柱体头部圆台体及以下为下层,其余部分为中层.按L=180 mm,W=50 mm,H=25 mm,l=152.5 mm,w=42.5 mm,a=4 mm,c=3 mm,D=8 mm,h=22.5 mm,b=3.5 mm,d=8 mm,β=20°,m=3,n=10,设计各层所需模具,并利用3D 打印技术进行制备.
(2)按比例1:1 分别取适量PSS6600 硅橡胶A、胶B,将其混合、搅拌后静置一段时间,待排出胶液中的气泡后再灌注进模具之中,完成注胶和合模,并通过螺栓螺母固定模具,放于平台上静置24 h.
(3)待硅橡胶液凝固后拧下螺栓,部分脱模后在各层之间补加胶液,通过胶液将3 层软体黏合,并使用螺栓螺母固定黏合模具,放于平台上静置24 h.
(4)待硅橡胶液凝固后拧下螺栓,进行完全脱模,取出完整的软体脊柱.修剪掉多余硅橡胶,得到最终的软体脊柱.
选用3 种硅橡胶按照图6 流程制备3 种软体脊柱,邵氏硬度分别为10,20 和30.分别向软体脊柱中通入0.056 MPa 气压,发现3 种软体机脊柱分别发生了120°,35°和20°的弯曲变形,如图7(a)~图7(c)示.考虑到软体脊柱需要软硬适中,本文选择邵氏硬度20 的硅橡胶.
2.2 TMP 折纸外壳及软体机器人样机制备
聚丙烯(PMMA)具有轻质、易加工、柔韧性好和价格低等优点,本文选择厚度为0.25 mm 的PMMA 薄板来制备TMP 折纸外壳.根据lA=17 mm,lB=40 mm,lC=32 mm,lD=18 mm,N=12,利用激光切割出TMP 二维折痕图,并折叠两个TMP 折纸结构,再将两者粘接得到TMP 折纸外壳,如图8 所示.

图8 TMP 折纸外壳制备Fig.8 Preparation of TMP origami-shell
利用3D 打印制备前脚和后脚,将软体脊柱嵌入前后脚之间,并使用螺栓连接各部分.随后,分别在软体脊柱上、下腔体圆柱形气孔处连接外部气管,与外部气源连接形成上、下气路,最终,得到如图9所示TMP 折纸防护双稳态软体机器人样机.

图9 TMP 折纸防护双稳态软体机器人样机Fig.9 Prototype of TMP origami-shell reinforced bistable soft robot
3 气驱动软体脊柱变形研究
3.1 硅橡胶本构模型
软体脊柱是软体机器人变形的主要部分,需要探究构成软体脊柱硅橡胶材料的本构方程.采用Yeoh 超弹性模型描述硅橡胶材料的超弹性特性.其应变能密度函数为[26]
式中,M,Ci0和Dk为输入参数;I1是应变张量第一不变量;λ1,λ2和λ3为3 个方向上的主变形率;材料的初始剪切模量为2C10,初始体积模量为2/D1;J是变形后与变形前的体积比,当材料不可压缩时J=1.实际应用中M一般最多取到3.本研究中认为所使用的硅橡胶材料不可压缩,取M=2,得到简化二阶Yeoh 超弹性模型应变能密度函数表达式为
使用Yeoh 模型描述硅橡胶超弹性需要明确C10和C20的值.本文借助材料单轴拉伸实验以及ABAQUS Property 模块中的参数拟合功能求解所用邵氏硬度20 的硅橡胶的C10和C20.根据GB/T 528-2009 标准,硅橡胶材料拉伸试样的尺寸如图10(a)所示.与图6 软体脊柱制备流程类似,制备硅橡胶试样,具体步骤可参见图10(b).
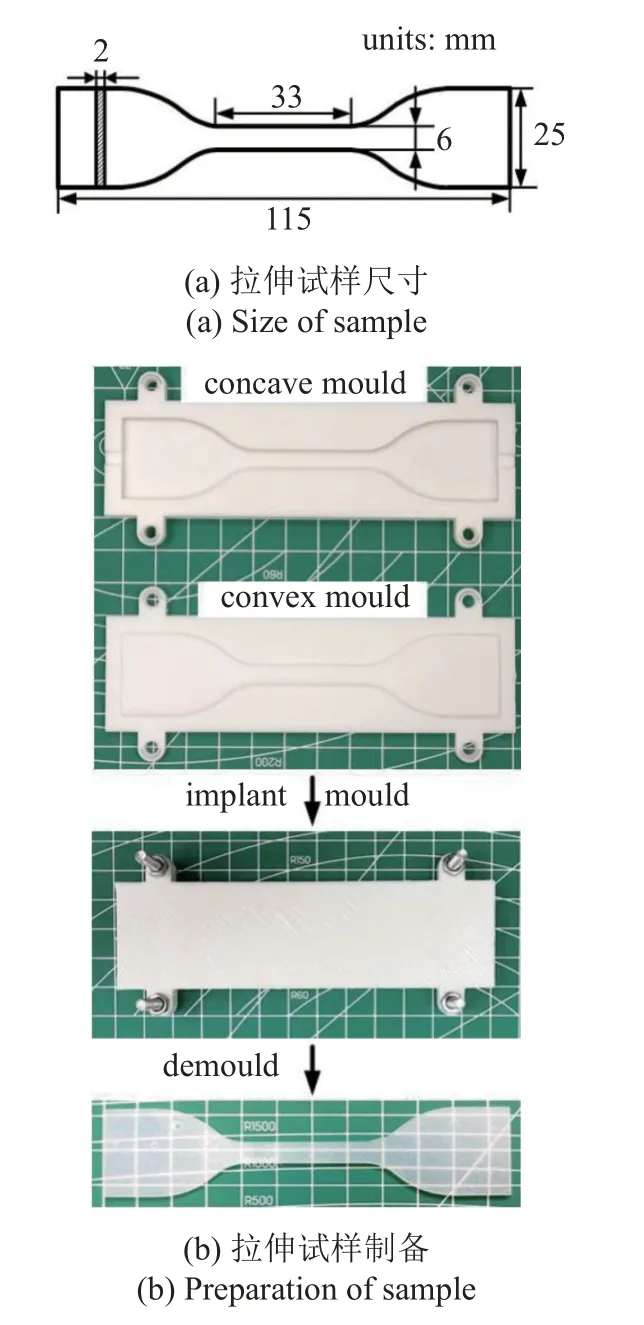
图10 硅橡胶拉伸试样Fig.10 Sample of silicone rubber
利用电子万能试验机对多组硅橡胶试样进行重复拉伸实验测试,拉伸速度为300 mm/min,如图11.通过ABAQUS Property 模块对测得应力应变数据进行参数拟合,得到C10=0.081 88 和C20=0.001 98,见图12,进而确定了描述硅橡胶的二阶Yeoh 超弹性模型.
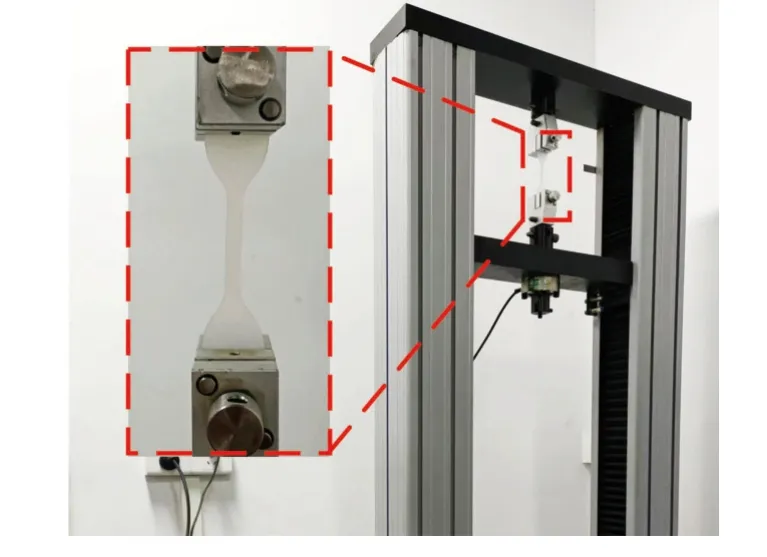
图11 硅橡胶拉伸试验设置Fig.11 Setting of silicone rubber tensile test
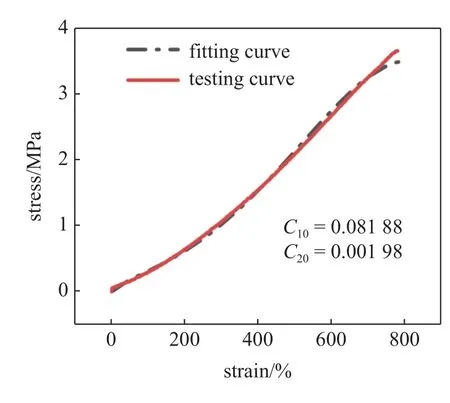
图12 参数拟合结果Fig.12 Result of parameter fitting
3.2 软体脊柱气压形变实验与仿真
在上述本构模型的基础上,进一步利用实验和仿真方法探究软体脊柱在不同气压下变形情况,如图13 所示.图13(a)~图13(f)分别表示了输入气压为0.03,0.05,0.056,0.063,0.067 和0.07 MPa 时软体脊柱的弯曲形态(上侧为实验结果;下侧为仿真结果),发现两种方法具有良好的一致性.图14 给出了不同气压驱动下两种方法得到的软体脊柱的弯曲角度,分别为(15°,8.79°),(25°,22.6°),(35°,30°),(45°,43.6°),(55°,56.5°)和(65°,72.4°),其中,括号中前项为实验结果,后项为仿真结果.可见,除了在较小气压下,实验和仿真方法得到弯曲角度有较大差别,其他情况下结果较为接近,且总体变化趋势一致,进一步证实了硅橡胶本构模型的正确性.产生误差的原因可能是仿真模型所使用材料模型的偏差以及实验过程中的人为误差等[27].
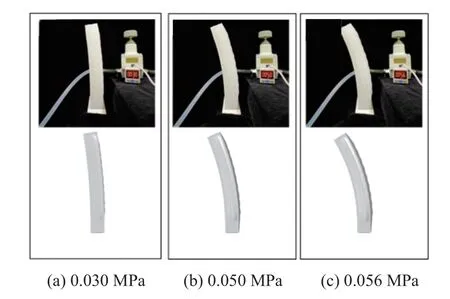
图13 不同气压驱动下软体脊柱变形形态(上: 实验,下: 仿真)Fig.13 Deformation form of soft spine in different pressure (top:experiment,bottom: simulation)
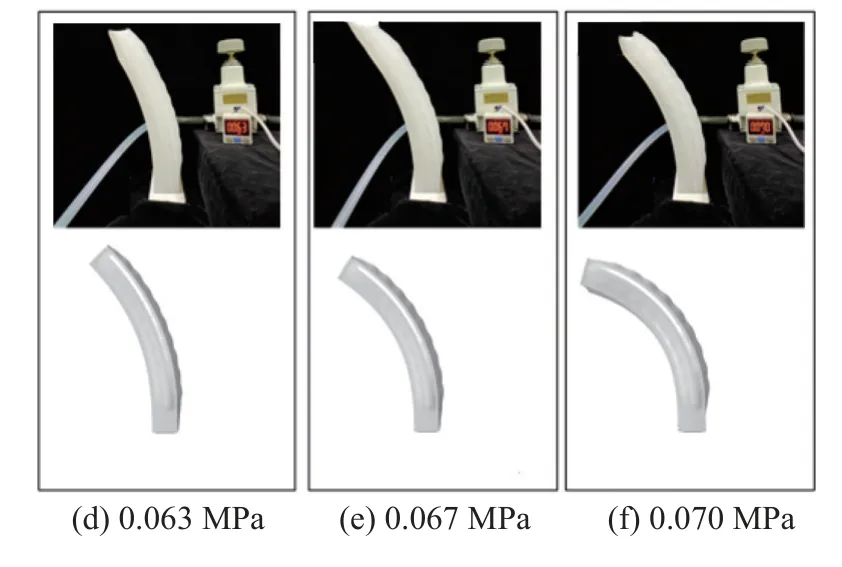
图13 不同气压驱动下软体脊柱变形形态(上: 实验,下: 仿真)(续)Fig.13 Deformation form of soft spine in different pressure (top:experiment,bottom: simulation)(continued)

图14 不同驱动气压下软体脊柱的弯曲角度Fig.14 Bending angle of soft spine in different pressure
3.3 双稳态系统能量曲线
双稳态系统的能量Ut由软体脊柱的应变能Ua、拉簧的拉伸能量Us和TMP 折纸外壳的应变能Uo构成,即
软体脊柱的应变能Ua由弯曲能Ub1和伸长能Ue1贡献
其中,Ea和Ia为软体脊柱等效弹性模量和惯性矩,将其等效为实心长方体;K为弯曲曲率.且有
TMP 折纸外壳的应变能Uo由折纸外壳弯曲能Ub2和伸长能Ue2贡献
式中,Eo和Io为TMP 折纸外壳等效弹性模量和惯性矩,将其等效为实心长方体,且有
拉簧的拉伸能量
式中,k和Δx为拉簧刚度以及初始伸长量.由硅橡胶材料体积不可压缩性可知
联立式(2)~式(16),软体脊柱材料参数由图12确定,并保证硅橡胶总体积不变.取Wa=38 mm,Ha=19 mm,Wo=40 mm,Ho=28 mm,k=0.5 N/mm和Δx=150 mm.图15(a)和15(b)分别为TMP 折纸外壳等效弹性模量Eo=1 MPa 和Eo=0.8 MPa 时各部分的能量曲线随弯曲角度的变化规律.由图可知,软体机器人系统分别在63°和-63°、67°和-67°处有两个能量势阱,意味着取不同的Eo时,软体机器人均有两个稳态点.
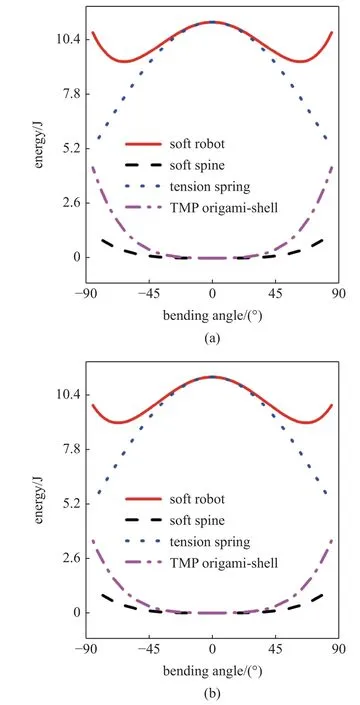
图15 软体机器人双稳态能量曲线Fig.15 Bistable energy curve of soft robot
4 软体机器人运动学分析
以二维平面运动模型来分析TMP 折纸防护双稳态软体机器人的运动特性,见图16(a).将前脚和后脚简化为直线,且脚部长度为f.设脚部与地面接触的一端为末端,与软体脊柱连接的一端为始端,以O为坐标原点的基坐标系位于后脚末端,并在前后脚的末端分别建立以O3和O0为坐标原点的局部坐标系.O0位于后脚部末端,坐标轴x0与脚部平行,方向从脚部始端指向末端,坐标轴z0垂直于x0,坐标轴y0由右手定则确定;同理,建立以O3为坐标原点的局部坐标系.设软体脊柱与前后脚连接处分别为末端和始端并建立以O2和O1为坐标原点的局部坐标系,原点O1位于始端面中心,坐标轴z1垂直于始端面,x1指向弯曲方向,y1由右手定则确定;同理,建立以O2为坐标原点的局部坐标系.此时,后脚末端相对于基座标系的变换矩阵和前脚末端相对于软体脊柱末端的变换矩阵可分别表示为
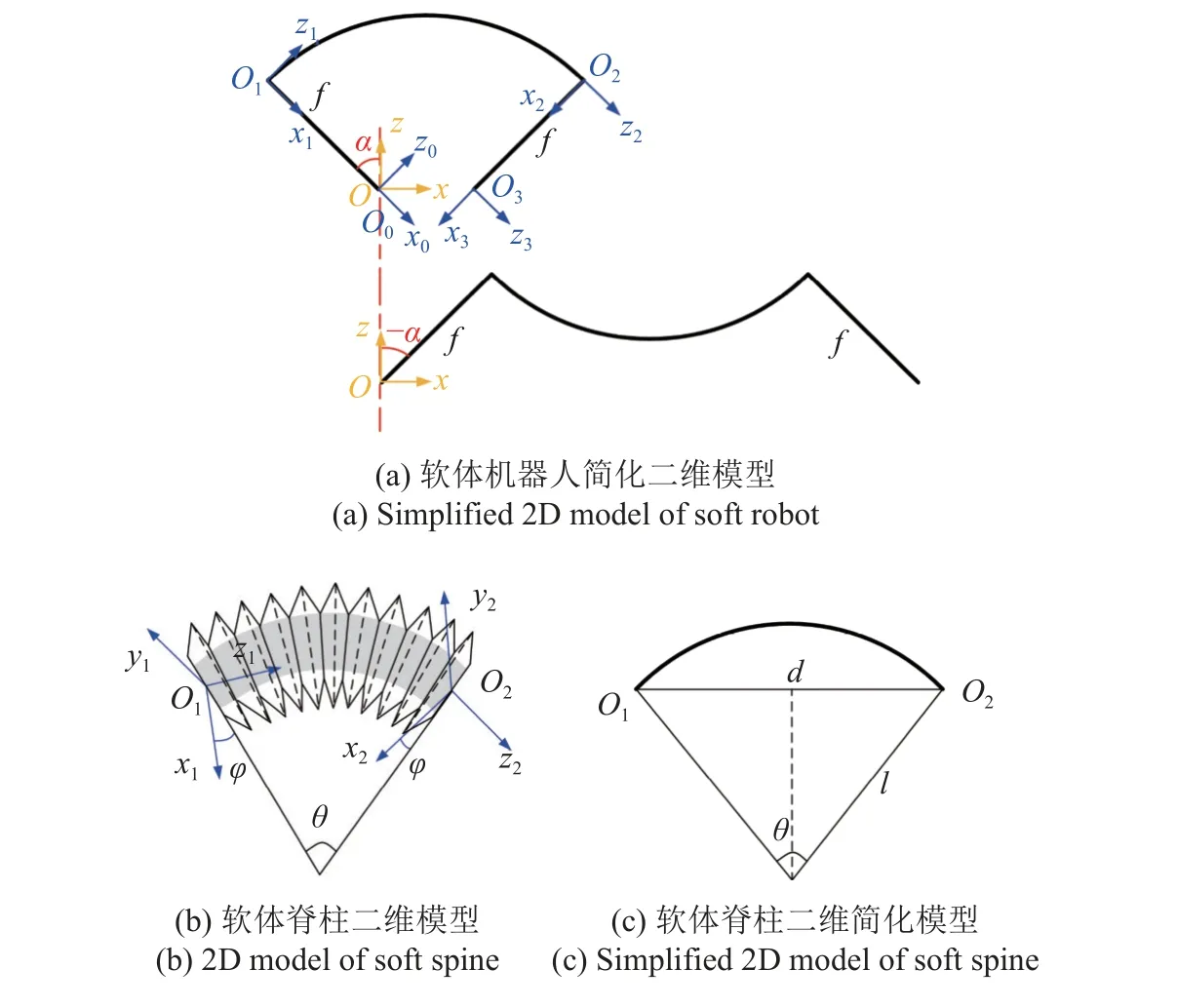
图16 软体机器人运动学模型Fig.16 Kinematic model of soft robot
利用分段常曲率法[28-30],假定软体脊柱弯曲过程中近似为曲率恒定的连续圆弧,且TMP 折纸外壳与软体脊柱协同运动,如图16(b)所示.软体脊柱的弯曲形态可由弯曲角度θ和扭转角度φ来描述,分别表示软体脊柱弯曲程度和扭转程度.将图16(b)模型映射至二维平面得到图16(c),设l为软体脊柱对应圆弧的曲率半径,d为两坐标系原点之间距离.
软体脊柱末端相对于始端的位姿可以用从以O1为坐标原点的坐标系到以O2为坐标原点的坐标系的齐次变换矩阵表示,具体步骤为: (1)沿O1O2连线平移d;(2)绕z1轴旋转φ角;(3)绕y1轴旋转θ角;(4)绕z1轴旋转-φ角.最终得到齐次变换矩阵为
其中,Trans表示平移变换矩阵;Rot表示旋转变换矩阵;sφ,cφ,sθ和cθ分别表示sinφ,cosφ,sinθ和cosθ.
软体机器人的运动学模型为
由式(21)得到的软体机器人运动学模型分析其一个运动周期的运动姿态,并与实验测试进行对比.选取两个典型状态,即两个稳态工况,进行研究,如图17 所示,实验测得所对应的角度分别为72°和-78°.这里需要指出的是,考虑到加工和组装误差,两个双稳态点对应的角度并不对称.通过图17 可以发现,在图17(a)所示第1 个稳态工况,TMP 折纸防护软体机器人的中心线理论上是两个斜线和一个圆弧的“类蘑菇”构型,而实验测试结果与理论解有少许偏差,这可能由软体脊柱的局部失稳和TMP 折纸外壳局部变形不均匀导致.图17(b)展示了另一个稳态工况,此时,TMP 折纸防护软体机器人的中心线为“类桥梁”构型,且理论和实验结果具有良好的一致性.
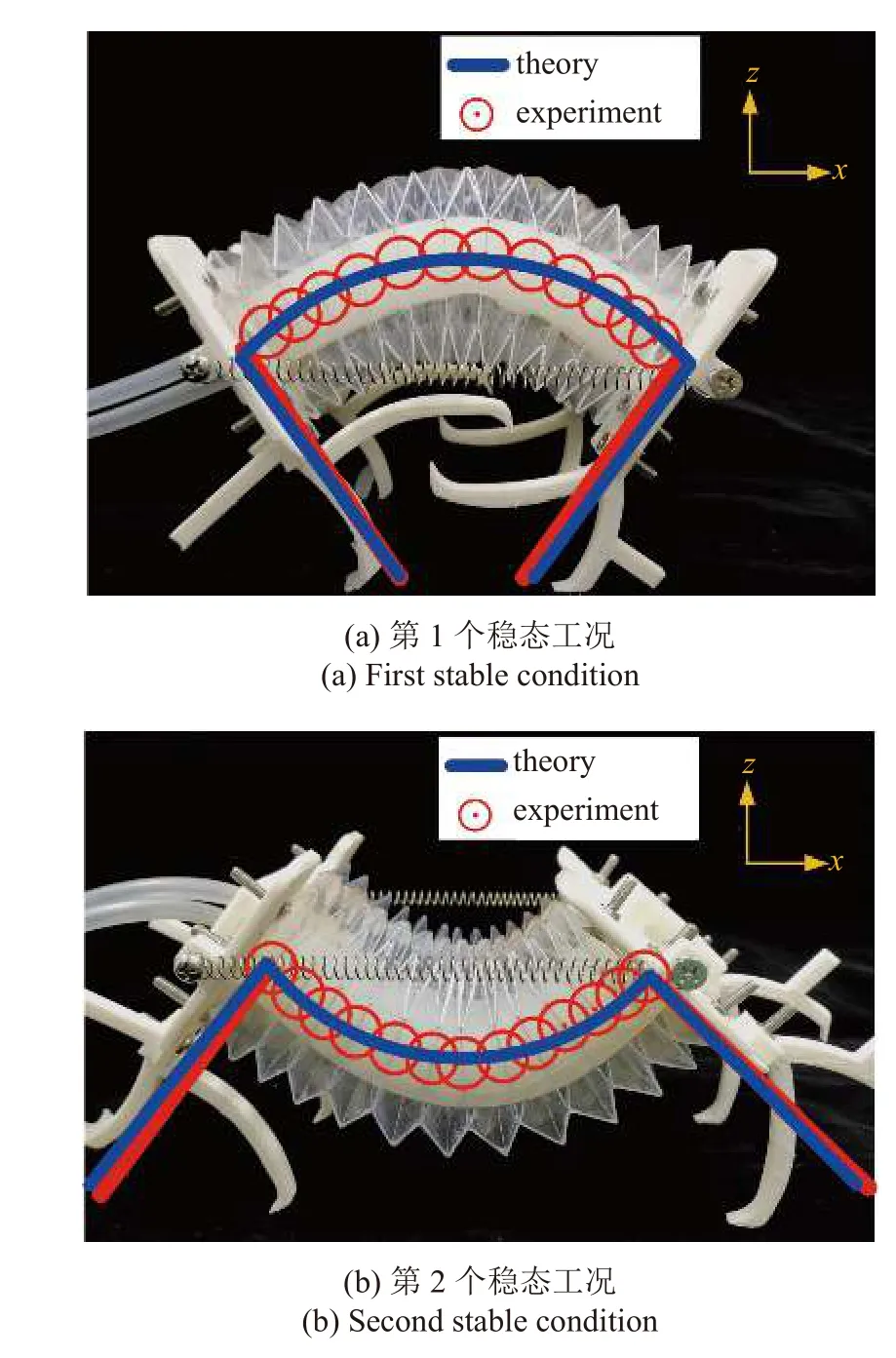
图17 软体机器人形态理论和实验对比Fig.17 Comparison of theory and experiment of soft robot
以后脚末端为原点,借助建立的运动学模型和实验研究软体机器人在一个运动周期,软体脊柱始端O1、软体脊柱末端O2和前脚末端O3这3 点沿x方向的位移,以及软体脊柱末端O2沿z方向的位移与软体脊柱弯曲角度的关系,如图18 所示.图18(a)为软体脊柱始端O1在x方向位移,可见,在一个运动周期,软体脊柱在-88°~88°范围内弯曲运动,O1在x方向位移变化范围为-69~69 mm,且位移与弯曲角度有弱非线性关系.图18(b)为软体脊柱末端O2在x方向的位移,在一个运动周期内,O2在x方向位移变化范围为92~232 mm,且位移与弯曲角度有较明显的类二次非线性关系.图18(c)为前脚末端O3在x方向位移,O3在x方向位移在一个运动周期内变化范围为22~302 mm,位移与弯曲角度存在弱非线性关系.图18(d)为软体脊柱末端O2在z方向位移,一个运动周期内O2在z方向位移变化范围为71~100 mm,且位移与弯曲角度有类余弦非线性关系.通过实验得到,在软体机器人从第一个稳态72°变化至第二个稳态-78°过程中,O1,O2和O3分别在x方向变化了128 mm,127 mm 和240 mm.此外,实验结果在理论曲线的附近有稍微波动,可能由实验误差与测量误差导致.综合考虑,可验证所建立运动模型的正确性.
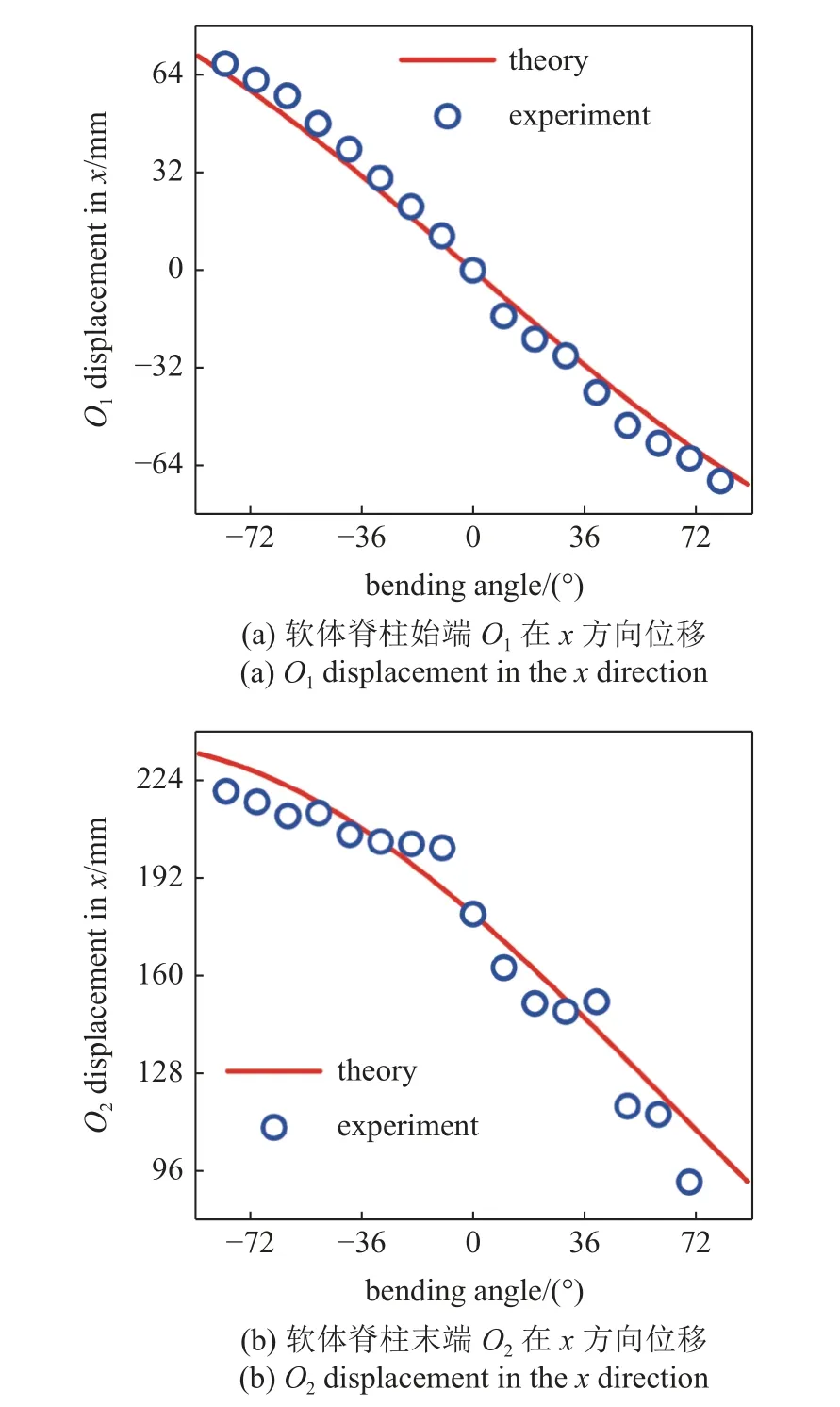
图18 利用运动学模型和实验研究软体机器人运动位移Fig.18 Kinematic displacement study of soft robot by kinematic model and experiment
5 TMP 折纸防护软体机器人运动性能测试
为了验证TMP 折纸防护双稳态软体机器人的良好运动性能,开展了系列实验研究,以研究其抵抗极端外界环境伤害能力、运动速度和非结构化环境运动能力.
5.1 TMP 折纸外壳防护能力测试
图19 所示为所搭建的实验测试环境,借助胶带将图钉固定在硬质板上,图钉针头朝上,从而模拟易发生穿刺伤害的极端危险环境.为了验证折纸防护的有效性,分别在搭建实验环境中测试无TMP 折纸外壳(图19(a))和TMP 折纸外壳防护软体机器人(图19(b)),并对比两种软体机器人经过图钉区域后的运动性能,发现: 无TMP 折纸外壳防护的软体机器人受图钉穿刺发生了结构破坏,并无法继续运动;而所提TMP 折纸外壳防护的软体机器人无明显伤害,仍能正常运动.因此,该实验有效地验证了TMP折纸外壳对软体机器人的防护作用.
需要指出的是,本文工作选择使用TMP 折纸结构而非保护膜防护软体机器人的原因有两个: 首先,TMP 折纸结构在运动过程中的应变能对软体机器人的双稳态能量势阱具有较大贡献(见图15),而防护膜没有抗弯刚度,无法提供必要的应变能;其次,折纸结构具有概念简单、轻质和良好的可编程特性.本文提出了一种潜在的防护软体机器人的框架,对于其他不同几何形状软体脊柱,以及具有不同的变形模式(比如扭转等)的软体机器人同样具有良好的适用性.
5.2 运动速度测试
在PVC 垫板上搭建速度测试实验环境,利用卷尺和秒表测量其运动距离和运动时间以计算软体机器人的平均运动速度,如图20 所示.TMP 折纸防护软体机器人在1.55 Hz 的气压频率驱动下,1.29 s 运动了420 mm,平均运动速度为325.6 mm/s,即1.81BLs-1(软体机器人身长BL=180 mm).图21 展示了现有经典软体机器人和刚性机器人的质量-运动速度关系图[31],其中,粉色三角形LEAP 为仿猎豹四足软体机器人[14],红色五角星代表本文TMP 折纸外壳防护软体机器人.可以发现,LEAP 和TMP 折纸外壳防护软体机器人均位于软体机器人和刚性机器人的交叉区域,属于刚-软耦合软体机器人,即,既具备软体机器人的轻质和大变形,又具备刚性机器人运动速度快的优点.对比LEAP,虽然TMP 折纸外壳防护软体机器人在质量-速度上有一定牺牲,但是具备抵抗外界坚硬锋利介质的能力.值得指出的是,通过改进材料制备工艺以及结构优化设计[32],TMP 折纸外壳防护软体机器人的质量-运动速度特性可以进一步得到加强.

图20 软体机器人运动速度测试Fig.20 Speed test of soft robot
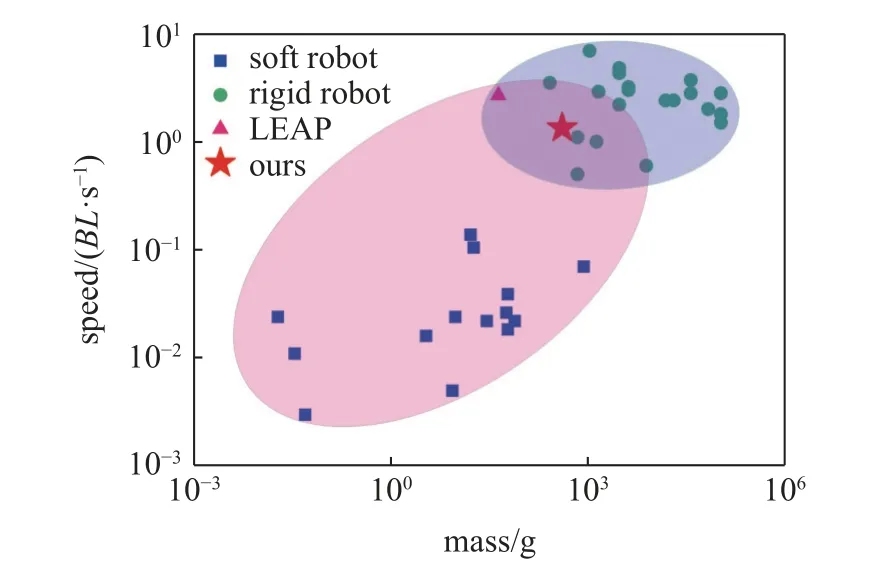
图21 TMP 折纸防护软体机器人质量-运动速度图Fig.21 Mass-speed chart of TMP origami-shell reinforced soft robot
5.3 复杂非结构化环境运动能力测试
为了进一步探索TMP 折纸防护软体机器人在复杂非结构化环境中的运动能力,选择石子路、泥泞地、浅水沟、浅草地和深水池环境对软体机器人进行运动能力测试,如图22 所示.可以发现,TMP折纸防护软体机器人可以在石子路(图22(a))、泥泞地(图22(b))、浅水沟(图22(c))、浅草地(图22(d))多种非结构化环境中正常运动,并分别在0.5,0.75,0.67 和0.67 Hz 气压频率和0.08 MPa 的驱动气压下获得了138,205.6,173.3 和144 mm/s 的平均运动速度,每周期运动气压做功约7.26 J.此外,在浅草地中还可以跳跃高度较小的障碍.在深水池中,TMP 折纸防护软体机器人的前脚和后脚与水介质进行接触,在双稳态系统能量释放驱动下,可以实现向前运动(图22(e)).
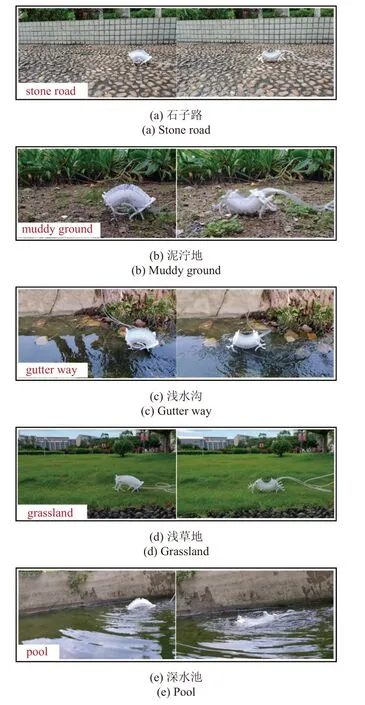
图22 复杂非结构化环境运动能力测试Fig.22 Movement capability test in complex unstructured environment
6 结论
融合折纸技术和双稳态系统,本文提出了一种TMP 折纸防护双稳态软体机器人.结合实验和有限元方法量化了软体机器人核心变形结构软体脊柱的变形形态与驱动气压之间的关系.引入分段常曲率法,建立了TMP 折纸防护软体机器人运动学模型,探究了软体机器人一个运动周期的运动姿态,包括软体脊柱始端、软体脊柱末端和前脚末端前进方向,以及软体脊柱始末端竖直方向的位置变化,并利用实验方法验证了运动模型的正确性.搭建测试平台并开展了大量实验研究发现:
(1)TMP 折纸防护软体机器人可以成功经过布置图钉的硬纸板,不发生损坏,而传统软体机器人受图钉穿刺发生了结构破坏,验证了TMP 折纸外壳的防护作用;
(2)TMP 折纸防护软体机器人奔跑速度为1.81BLs-1,其质量-运动速度关系介于软体机器人和刚性机器人交叉区域,属于刚-软耦合机器人,既具备软体机器人的轻质和大变形,又具备刚性机器人运动速度快的优点;
(3)TMP 折纸防护软体机器人可以成功在石子路、泥泞地、浅水沟、浅草地和深水池环境中运动,验证了其优良的复杂非结构化环境中的运动能力.所提TMP 折纸防护软体机器人设计策略可为灾区救援、星球探索等领域复杂非结构化环境作业机器人的研发提供理论指导.
致谢
感谢罗湛腾、陈舒桐和叶敏睿在样机制备和实验测试中提供的帮助.