基于UWB技术在料框跟踪系统的研究
2023-11-16刘艳辉吝健全邱永刚
刘艳辉 吝健全 邱永刚
郑州宝冶钢结构有限公司 河南 郑州 450000
引言
在钢结构生产车间管理过程中,零件料框的定期盘点和监视是车间管理的关键工作,要实时了解料框零件的位置,传统料框跟踪管理主要是人工标记﹑记录等管理模式,这种管理模式的弊端在于速度慢﹑散乱﹑复杂等缺点,让料框位置监控管理变得烦琐,大大减低工人的效率。为了实现料框高效管理,本文提出一种基于UWB技术结合三边定位算法[2],基于Java EE的多平台料框设备管理系统搭建的核心是以料框定位模块,该模块用互联网技术精确运算料框位置。
1 UWB料框跟踪系统总设计
UWB[3]具有传波速度快﹑定位精度精确等特点被广泛应用于室内定位。UWB无线信号作为载体与到达时间定位三边定位算法[4]相结合,设计出一款定位性能较好的室内料框定位系统。UWB料框跟踪系统主要由UWB模块(标签)﹑信号基站和上位机定位算法软件组成成。UWB定位模块和信号基站通过双边双向测距[5]算法实现对料框位置的定位,UWB模块发送定位指令,信号基站接收到定位信号,从信号基站开始传输数据,定位数据集中传送到主信号基站进行料框位置解算,从而解算出UWB模块位置完成定位。
2 料框跟踪系统的硬件设计
料框跟踪系统的硬件由UWB模块和厂房4个基站组成,该定位系统的UWB定位模块和信号基站构成料框定位系统硬件层。其硬件电路包括STM32控制模块﹑供电模块﹑UWB定位模块﹑蓝牙传送模块4部分[6]。STM32控制模块主要负责采集定位信号﹑存储处理﹑发送定位信号﹑接收料框跟踪系统电路的控制数据,供电模块为整个料框跟踪系统提供电力管理,蓝牙传送模块主要作用于与上位机数据互通。
图1中STM32控制器选用的芯片型号为STM32F103C8T6,UWB定位模块型号是DW1000定位芯片[7]。DW1000定位芯片是料框定位系统的核心组成部件,用SPI连接DWM1000与STM32F103C8T6模块,料框跟踪系统还包含外部配置存储器﹑时钟使能等硬件配置。
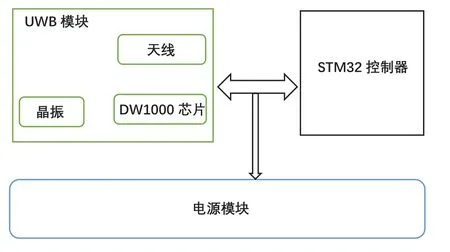
图1 料框跟踪系统硬件框架图

图2 料框UWB定位料框
2.1 UWB无线收发模块
UWB定位模块所选用型号为DW1000芯片,此定位模块具有超宽带无线收发功能,用户不需要考虑天线设计。DWM1000芯片的供电为3.6V,定位模块主机接口形式为 SPI。
DWM1000芯片用于室内定位系统的精度为10cm,定位信号数据传输速率为6.8Mb/s,信号最大传送距离是为300米。DWM1000芯片对于多路径信号衰弱的抗干扰能力更强,DWM1000芯片凭着可靠信号通信,功率消耗小,供电使用时间长等特点广泛应用于实时定位系统和无线传感网络。
3 料框定位算法
3.1 三边定位算法
选择UWB信号传播模型,再选择合适定位算法就可以算出定位终端的位置信息。本文选择测距定位的基础定位算法——三边定位算法[8-10],简单介绍测距定位的基本定位过程。如图3所示通过圆模型计算定位终端的位置信息——三边定位算法,A﹑B和C为已知位置信息的AP,A﹑B和C是圆心且圆的半径为测试点到圆心的距离。
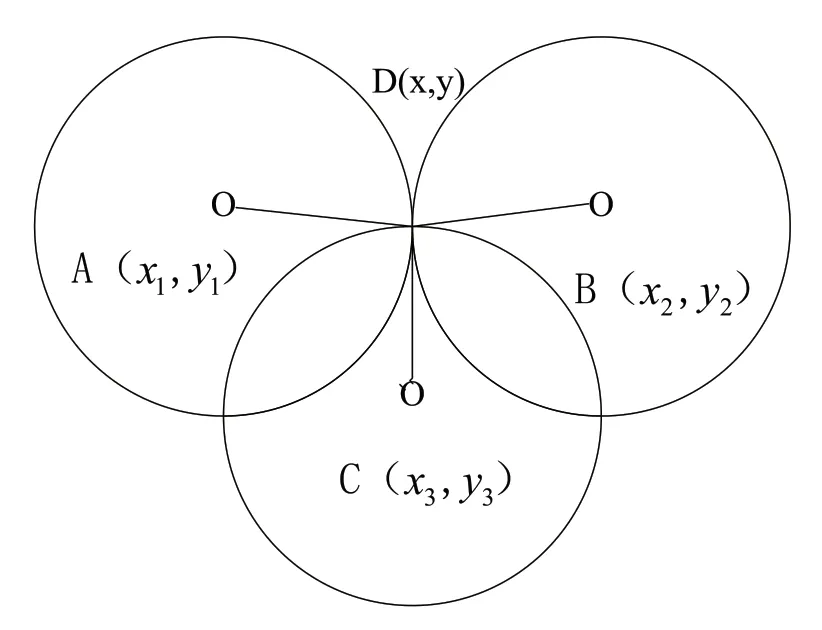
图3 三边定位算法工作原理图
通过图3可以看出,料框定位终端测得与最近3个AP的信号值,根据信号传播模型就可以计算出圆的3个半径,3个圆交汇的地方就是室内运动载体的位置[11-13]。假设3个固定AP的坐标分别为载体到AP距离分别为假设室内运动载体D的位置坐标为,则三边定位算法的公式如下:
3.2 料框定位算法实现
上位机软件程序中用到了3.1中所提到的三边定位模型的原理。设备Device A 收到定位信号之后,立刻返回信号,最终得到Tround1﹑Treply1﹑Tround2﹑Treply2时间差。利用信号测距过程如下:Device A发送定位指令,Device B响应,规定Device A为定位模块标签,而Device B就是信号基站。Device A发出定位信息并记录发送时间TX,等待Device B基站接收。Device B到定位指令,发送定位信息至Device A标并记录接收时间RX,最后向基站发送final指令,Device B基站收到final,表示此次测距结束。
4 料框定位实际测试
设计完成UWB定位模块在厂区进行实测,主要测试该料框定位模块的定位精度和实时跟踪效果。
实验地点:郑州宝冶钢结构有限公司二车间。
实验设备:4个基站﹑一个UWB定位模块﹑一台装有定位软件的电脑。
实验场景:在二车间范围内进行,在车间依次将料框定位模块放置在(1,1)﹑(2,2)﹑(3,3)﹑(4,4)﹑(5,5)﹑(6,6)﹑(7,7)﹑(8,8)﹑(9,9)﹑(10,10)位置进行实测。
实测定位结果与测试点进行对比,并记录测试数据如下表1所示。
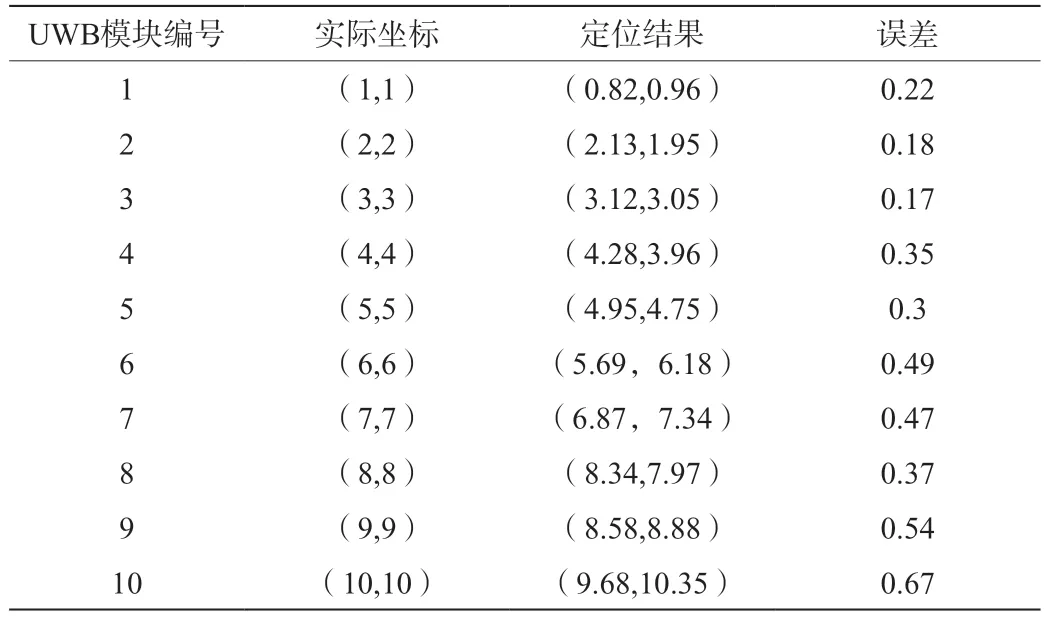
表1 UWB定位模块实测定位数据
通过记录数据进行对比发现,定位模块移动的距离越大时,误差也在不断增大,但总体上能够满足车间对料框位置的跟踪。
5 结束语
本文介绍了基于UWB技术在料框跟踪系统的研究及相应定位算法和实验数据误差分析,并经过车间实际测试验证。该料框跟踪系统的定位精度能够满足车间对料框位置管理需要。此料框定位系统对提高钢结构行业零件装配效率具有重要的意义。
