混合扫描式旋转靶离子注入机剂量控制系统
2023-11-15曹华翔彭立波王迪平罗南安罗才旺
曹华翔,彭立波,王迪平,罗南安,徐 松,罗才旺
( 北京烁科中科信电子装备有限公司长沙分公司, 湖南 长沙 410014)
离子注入机剂量控制系统的主要功能是精确采集离子束流和剂量,并实时控制离子束扫描运动或靶台运动将离子按设定剂量均匀、精确地注入到晶圆表面,属于离子注入机的关键子系统之一[1,2]。旋转靶离子注入机为注入机主流机型之一,多为中能大束流、高能大束流离子注入机,广泛应用于功率器件、SOI 和材料剥离等大剂量离子注入领域。旋转靶离子注入机的经典机型有Axcelis公司的GSD200、NV-10-160 和应用材料公司的PI9500 等,均为全机械扫描方式注入,其特点是批式注入降低大束流注入时的晶片温度,且相对单片注入机台束流利用率高,设备产能大,机械结构较复杂[3-6]。为了进一步提升产能,本文介绍了一种新型旋转靶离子注入机的剂量控制系统,该系统采用电扫描与机械扫描相结合的方式,特点是离子注入时水平方向采用电扫描,垂直方向采用机械运动扫描,束流利用率比传统全机械扫描的旋转靶离子注入机更高,因此设备产能大。为了实现混合扫描式旋转靶离子注入机将离子按设定剂量均匀、精确地注入到晶圆,设计了混合扫描式旋转靶离子注入机剂量控制系统,并开发了核心控制部件剂量积分仪。
1 系统设计思路及工作原理
图1 所示[7]为传统全机械扫描式旋转靶离子注入机的离子注入方式,离子束保持静止不动,靶盘高速匀速旋转实现晶片在水平方向的注入扫描,同时靶盘上下做往复运动实现晶片垂直方向的注入扫描,通过水平、垂直方向的二维机械扫描,使得离子注入到整个晶片上。其中,垂直方向由于整个靶盘需要做往复运动,因此运动过程中存在加减速过程,而为了保证注入均匀性,注入过程中晶片的运动需要保持设定的速度,因此靶盘上下做往复运动过程中,达到设定速度之前的加减速期间,离子束必须在晶片范围之外,此时离子束中的离子未被注入到晶片中,若解决该问题,避免这部分离子束的浪费,可进一步提升设备的产能。
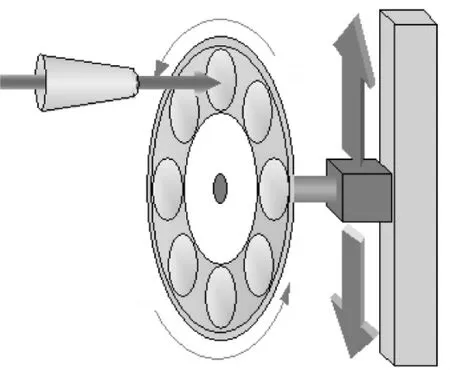
图1 全机械扫描离子注入机注入工作示意图
为了充分利用上述靶盘上下做往复运动过程中加减速时损失的离子束,首要问题就是克服批式靶盘质量大、惯量高、加减速时间长的缺点。为了解决靶盘往复运动过程中加减速时间长的问题,因此考虑采用静电扫描代替该往复运动的机械扫描,由于静电扫描过程中高能离子束的加减速时间极短,以典型的100 keV、B+离子注入条件为例,如图2 所示扫描电极的长度L 约为20 cm,则离子的加速时间为因此几乎不存在由于离子束往复运动加减速造成的离子束流浪费问题,可进一步提升设备的产能。
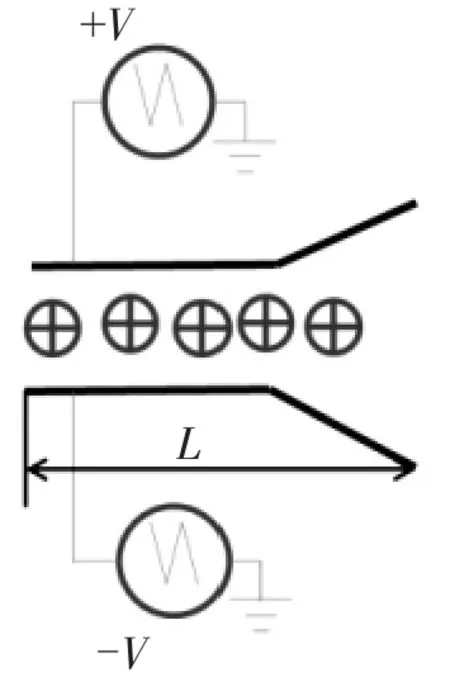
图2 离子束静电扫描示意图
为了实现水平方向束流的均匀性控制,水平方向通过扫描电源输出扫描电压给扫描电极,使束流在水平方向高速来回扫描,束流在水平方面形成特定分布,通过控制扫描电压的变化率(在任意扫描位置的停留时间)来控制束流在水平方向的分布规律;垂直方向采用扫描电机使靶盘以恒定的速度做旋转扫描运动,实现晶片垂直方向的束流扫描,从而使得离子均匀注入整个晶圆表面。如图3 所示,由于旋转靶沿径向不同位置旋转速度不同,内圈旋转速度小,外圈旋转速度大,因此,为实现旋转靶离子注入机离子均匀注入晶片,需要控制扫描波形斜率,实现束线在水平方向沿径向按一定比例分布。如图3 中扫描波形所示,束流扫描至外圈附近时扫描斜率小,束流停留时间长,因此外圈束流大;反之,束流扫描至内圈附近时扫描斜率大,束流停留时间短,因此内圈束流小。注入过程中的实时注入剂量统计,通过统计通过束窗口的束流来实现,靶盘每旋转一圈,统计一次通过束窗口的束流积分值,从而换算得到靶盘上晶片的实时注入剂量。

图3 旋转靶离子注入机水平方向束流分布示意图
2 剂量系统总体设计
旋转靶离子注入机的剂量控制系统的硬件结构如图4 所示,系统主要由以下部分组成:剂量控制器、移动法拉第杯、剂量法拉第杯、扫描电源、剂量积分窗口传感器、靶盘旋转电机和移动法拉第电机。其中,剂量积分仪是剂量控制系统的控制中枢,负责控制靶盘旋转电机、移动法拉第电机、扫描电源,同时采集移动法拉第杯和剂量法拉第杯接收到的束流,采集积分窗口信号并与主控计算机通信;靶盘旋转电机用于驱动批式靶盘的旋转,实现晶片注入时垂直方向机械扫描;移动法拉第电机和移动法拉第杯结合使用,用于采集离子束的宽度和位置,及束流开启水平方向电扫描之后的束流均匀性分布;扫描电源用于接收剂量积分仪发出的扫描电压控制信号,并进行放大形成静态或者交变的扫描电压,扫描电源输出的电压加载在扫描电极上,形成扫描电场,控制离子束的位置或者水平方向的扫描运动状态,可通过修正扫描电场的变化曲线来调整束流扫描后水平方向的分布均匀性;剂量法拉第杯用于注入时采集束流并统计已注入的剂量;积分窗口信号用于判断束窗口(见图3 所示)是否到达束流通道位置,若到达束通道位置则开始采集束流,离开束通道位置则停止采集束流;主控计算机是离子注入机的主控系统,用于与剂量控制系统通信,发送均匀性建立、注入等指令,并获取和显示束流的均匀性分布、注入剂量等信息。

图4 剂量控制系统的硬件结构示意图
3 剂量积分仪硬件设计
剂量积分仪是剂量控制系统的核心部件,其主要功能是实现多通道、可变量程、高精度束流检测、扫描波形信号发生与输出、束流均匀性检测及修正、实时剂量采集及注入束流监控。剂量积分仪硬件设计方案是在原基于NI CompactRIO 的离子注入机剂量控制系统[8]中剂量控制器的技术基础上进行设计开发,去除了原剂量控制器上的积分电路、峰值检测电路;同时对束流检测电路进行改进设计,从而将剂量采集板的最大采集电流扩大至40 mA,可用于20 mA 以上离子束流的检测和剂量监控;增加了串口通信模块、编码接口模块、I/O 接口模块、TCP/IP 通信模块和存储模块用于替代原有NI CompactRIO 控制器,从而将NI CompactRIO控制器的功能集成进了剂量积分仪器中;由于旋转靶离子注入机注入时需要连续长时间进行剂量积分,去除了原剂量控制器上的积分电路,增加了电压频率转换模块,用于注入时实时剂量统计。
剂量积分仪硬件设计方案如图5 所示,包含主CPU 单元、串口通信模块、编码接口模块、I/O接口模块、TCP/IP 通信模块、存储模块、电压频率转换模块、多通道多量程束流采集模块、SPI 接口模块、从CPU 单元和模拟波形发生电路。其中,串口通信模块用于控制靶盘旋转电机、和移动法拉第电机。由于采集水平方向束均匀性分布时,束流采集需要与移动法拉第电机位置高速实时同步,因此编码接口模块用于高速实时获取电机实时位置;存储模块用于存储硬件基础数据、配置参数及注入记录等数据。

图5 剂量积分仪硬件设计原理框图
多通道多量程束流采集模块是剂量积分仪的核心模块之一,由通道程控电路、挡位程控及I/V转换电路、信号放大滤波电路、多通道A/D 转换电路等组成,用于束流信号的接入、转换、放大滤波及A/D 转换。通道程控电路设计有两路模拟电流采集通道,分别与剂量法拉第杯和移动法拉第杯相连(如图5 所示) ,移动法拉第杯用于测量离子束位置及宽度、束流扫开后水平方向束均匀性分布,剂量法拉第杯用于离子注入时实时剂量采集与注入束流的实时监控。挡位程控及I/V 转换电路共有5 个量程,分别是4 μA 档、40 μA 档、400 μA 档、4 mA 档和40 mA 档。信号放大滤波电路采用三级精密运算放大,其中第二级提供4种放大倍数可选,分别为0 倍、2 倍、4 倍、8 倍,可以通过SPI 接口模块进行通信选择合适的放大倍数,根据模拟通道中的电流大小自动切换档位,提高束流采集精度;第三级运放电路为低通滤波电路,用于采集水平方向的束流均匀性分布。
剂量积分仪从CPU 单元寄存了水平电扫描的波形数据,每一个波形点的数据由4 个字节组成,其中有2 个字节为电压值,另外两个字节为此点电压对应的斜率值,从CPU 单元根据寄存的波形数据来控制模拟波形发生电路,从而形成特定的连续模拟量扫描波形。同时,主CPU 单元也可经由SPI 接口模块,直接对波形发生电路产生的扫描波形的幅度、周期、中心位置进行二次调节。剂量积分仪以主CPU 单元为控制核心,在注入过程中,通过电压频率转换模块将剂量法拉第接收的实时束流转换成数字脉冲信号,脉冲频率与束流大小成正比,主CPU 单元通过脉冲计数实现实时的剂量统计,并通过TCP/IP 模块将实时的剂量值传送给主控计算机。此外,通过I/O 接口模块采集积分窗口信号来消除不必要的闲时剂量统计带来的零漂误差,当束窗口(如图3 所示)即将达到束流区时产生高电平,此时进行剂量统计;束窗口离开束流区则转变为低电平,此时停止剂量统计。
4 结 论
通过这种新设计,该混合扫描式旋转靶离子注入机剂量控制系统满足使用要求,其束流的静电扫描功能和束流检测功能实现了束流的均匀性检测及修正,保障了注入均匀性的同时,提升了旋转靶离子注入机的束流利用率,从而使得旋转靶离子注入机产能得到进一步提升。目前,北京烁科中科信电子装备有限公司该机型已批量交付客户使用,注入均匀性和重复性均达到1%以内,同时,相比同等200 mm(8 英寸)PI 9500 机台其束流利用率提升超过50%。
