电动轮汽车转向特性的轮胎接地印迹研究
2023-11-15刘晋霞温明星梁志豪杜现斌
刘晋霞,温明星,梁志豪,杜现斌
(山东科技大学 交通学院,山东 青岛 266590)
0 引言
在汽车电气化发展的进程中,直接将驱动电机与车轮集成而形成结构紧凑、传动高效、空间利用率大的电动轮汽车成为电动汽车发展的重要方向[1]。由于电动轮汽车各轮能独立驱动,这使得基于传统前轮阿克曼的转向系统在实际转向过程中,可轻易利用内外侧车轮速度差而实现滑移助力转向[2-4],对于前轮则会发生偏转滑移,相对传统汽车转向将产生更大的附加横摆力矩[5-6],而成为该领域的研究热点。
电动轮汽车转向过程中附加横摆力矩的产生也必将由地面-轮胎作用力相平衡。轮胎与路面相互作用的研究对认清轮胎力学复杂特性具有重要的意义[7-10]。目前,关于汽车轮胎与地面之间相互作用的研究主要是根据轮胎动力学理论采用实验、模拟等方法,建立轮胎各种经验、半经验模型[11-12]及有限元模型[13]而展开。由于有限元模型可以直观反映出轮胎接地情况、接地面积、印痕面积等问题,得到了较为广泛的应用。众多学者采用ABAQUS、ANSYS等有限元软件建立轮胎与地面接触模型,对不同气压及静态载荷下轮胎与地面接触变形[14],轮胎接地特性、结构参数与滚动阻力的关系[15-16],行驶状态与轮胎-路面接触应力响应关系[17]等问题进行了研究。
以上关于轮胎与路面之间相互作用的研究,未涉及电动轮汽车滑移助力及偏转滑移转向时(以下简称偏转滑移工况)轮胎与路面接触特性。而对电动轮汽车偏转滑移工况转向时轮胎与路面接触特性的研究,对于认清电动轮汽车转向过程中轮胎受力、磨损等特性等具有重要意义。因此,本文建立四驱电动轮汽车双轨2自由度转向模型,考虑电动轮电机转矩分配方案的基础上,分别计算以30、60 km/h转向时各电动轮垂直载荷、纵向力和侧向力,并利用ABAQUS建立轮胎-路面接触有限元模型,研究电动轮汽车偏转滑移工况各车轮轮胎接地印迹区域形状、应力和应变,以期得出电动轮汽车转向时各轮胎接地区域所受载荷的特点,进一步为电动轮转向控制设计奠定理论基础。
1 电动轮汽车动力学模型
1.1 转向动力学模型
针对前轮转向的四驱电动轮汽车,在转向过程中其左、右侧车轮所受垂直载荷会重新分配,因此本文建立电动轮汽车双轨2自由度转向模型[3],如图1所示。
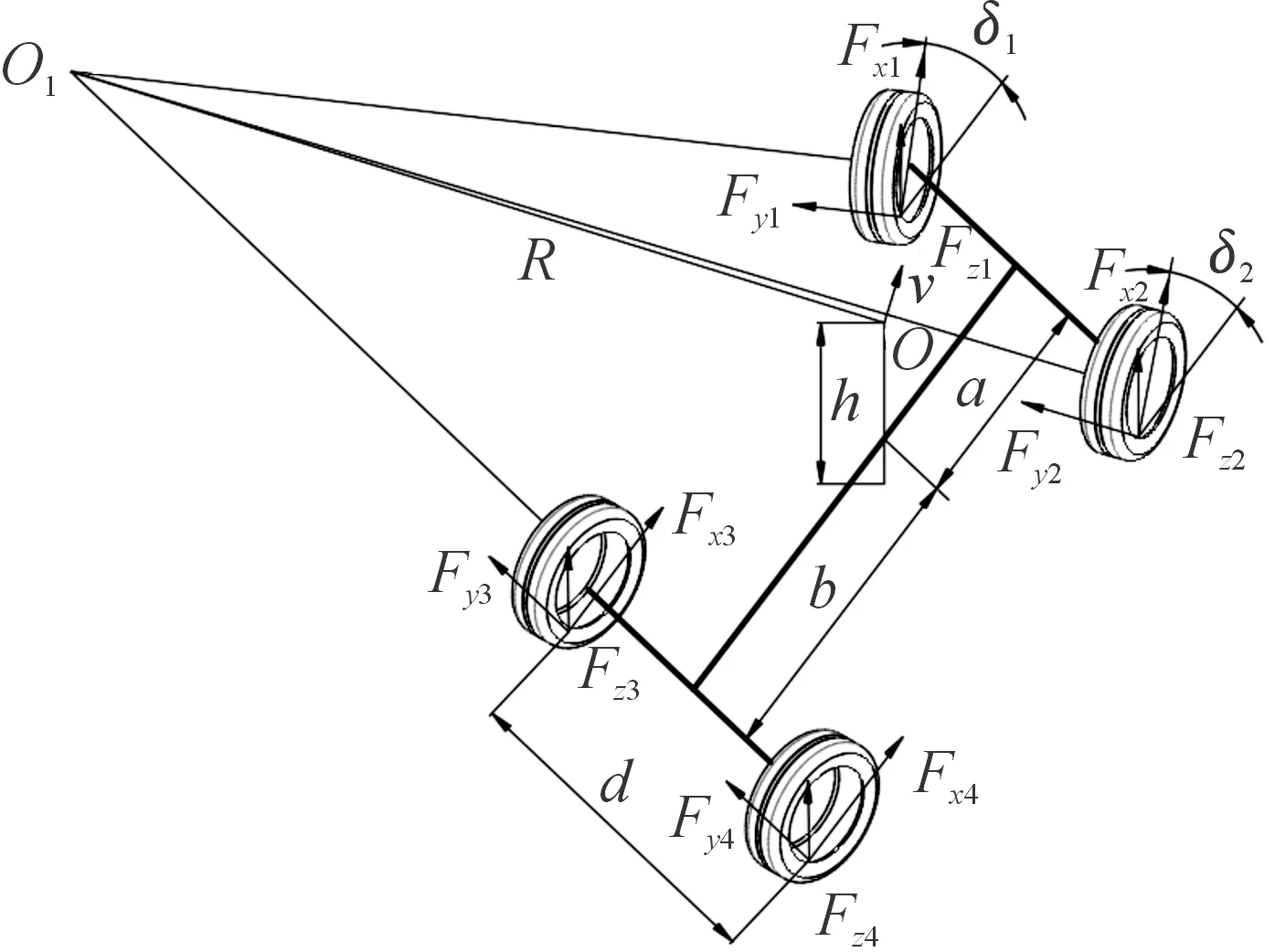
图1 电动轮汽车双轨2自由度转向模型
电动轮汽车以速度v、转弯半径R绕O1点向左转,O为车辆质心(位于车辆纵向对称面内),δ1、δ2分别为左、右前轮偏转角,Fzi、Fyi、Fxi分别为各车轮所受垂直载荷、侧向力、纵向力,i=1、2、3、4分别表示左前、右前、左后、右后车轮,a、b分别为车辆质心距前、后轴距离,h为质心高度,d为轮距。忽略行驶过程中空气阻力和路面不平激励的影响,此时建立整车动力学方程:

(1)
式中:m为整车质量;vy、vx分别为车辆横向、纵向速度,vy+vx=v;γ为车辆横摆角速度;J为车辆转动惯量;M为横摆力矩,M=d/2(Fx2cosδ2+Fx4-Fx1cosδ1-Fx3)。整车相关参数如表1所示。

表1 整车参数
1.2 各电动轮受力分析及转矩分配
四驱电动轮汽车转向时,由于离心力的作用,车辆重力作用线相对车辆纵向对称面发生偏斜,而使各车轮所受垂直载荷发生变化:
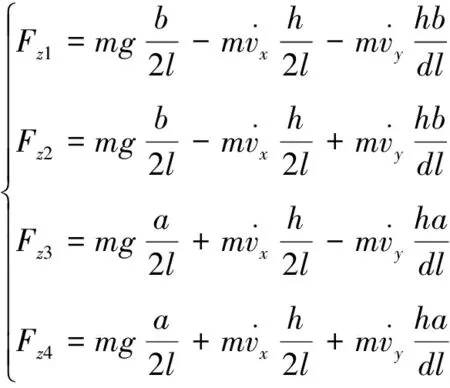
(2)
式中:g为重力加速度,取9.8 m/s2;l为轴距,l=a+b。

车辆转向过程中各车轮速度平方与其转弯半径成反比。为避免车辆横向失稳,本文取整车最大侧向力Fy不超过滑动摩擦力,且各车轮侧向力Fyi均不超过其滑动摩擦力,即

(3)
式中:vyi、vxi分别为各车轮横、纵向速度;Ri为各车轮转弯半径,R1=l/sinδ1,R2=l/sinδ2,R3=l/tanδ1,R4=l/tanδ2,δ2=arctan(l/(l/tanδ1+d));μ为路面摩擦因数。
考虑路面摩擦力作用,整车纵向力Fx与电机总驱动力Td的关系为
Fx=Td/r-μmg
(4)
式中:r为轮胎半径。
为保证各车轮转弯时能充分利用路面最大附着力,同时保证车辆的总驱动力不变,根据文献[4]此处采用基于垂直载荷大小的分配策略确定各驱动电机转矩,即电机转矩大小与垂直载荷大小和路面最大附着力成正比关系,则有:

(5)
在匀速偏转滑移转向时,各电动轮在纵向方向上产生滑移,其纵向力大小等于轮胎所受滑动摩擦力,即
Fxi=μFzi
(6)
1.3 各电动轮受力计算
本文取车速分别为30、60 km/h匀速直行及δ1为30°偏转滑移转向工况,根据式(2)、(3)、(6)计算各电动轮所受纵向、侧向与垂直载荷情况如表2所示。

表2 各电动轮所受载荷计算结果
2 轮胎-路面接触有限元模型
2.1 轮胎建模及验证
本文选取型号为205/55 R16的子午线轮胎建立有限元模型。轮胎主要由胎面、胎肩、胎侧和胎圈等部分组成[18],各部分又分别为橡胶、纤维增强橡胶复合材料及橡胶包裹的带束层、帘布层和钢丝圈等构成,结构较为复杂。在建模过程中,忽略轮胎表面细小横向花纹特征。由于轮胎是绕其轴线的回转体,则其任意径向二维横断面结构相同,在适当简化的基础上,建立轮胎各部位二维横截面模型如图2所示。其中具有不可压缩超弹性和非线性的橡胶材料选择常用于求解大变形材料的Yeoh模型[19]进行模拟,纤维增强橡胶使用线弹性材料模型来模拟,胎圈中的钢丝圈采用嵌入面单元来模拟,并分别采用四边形CGAX4H、三角形CGAX3H、SFM3D4R表面网格单元类型。

图2 轮胎二维横截面
根据普通轮胎充气压力0.25 MPa[20],在以上二维轮胎内表面施加压强,压强与内表面处处垂直,进行静力学分析,计算充气状态下胎体所受应力及应变分别如图3(a)、(b)所示。由图3可知,轮胎施加压强后胎体膨胀变形量与文献[20]中轮胎充气后结果相似。

图3 加压工况模拟
2.2 轮胎-路面建模及验证
本文研究四驱电动轮汽车在普通公路路面的偏转滑移转向过程,轮胎与路面接触模型选择轮胎-硬路面接触模型[15]。采用*SYMMETRIC MODEL GENERATION子程序,将轮胎二维横截面模型以7.5°为单位绕轮胎轴线旋转一周而得到轮胎的三维模型,并采用解析刚体分别定义路面及轮辋,将轮胎、轮辋、路面进行装配后形成如图4所示的轮胎-路面有限元模型。模型中,轮胎与路面的接触采用“表面与表面接触”,以刚性路面为主面,轮胎表面为从面,并将轮胎切向行为中的摩擦公式与法向行为中的压力过盈分别设置为“罚”函数、“硬”接触。
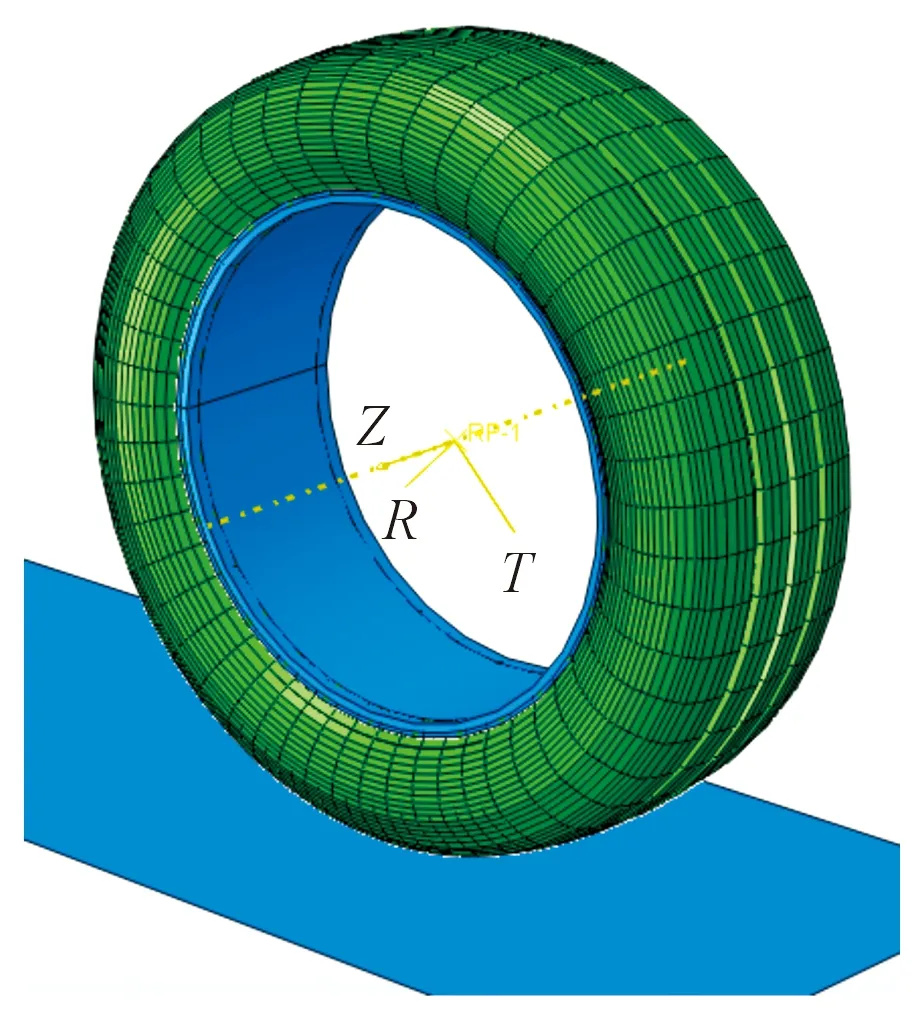
图4 3-D轮胎-路面有限元模型
仿真过程中,对轮胎施加其各项载荷时,假设将车轮所受载荷作用于车轮中心质点处,该质点与轮辋刚性约束。当车辆车速分别为30、60 km/h匀速直行时,轮胎接地法向压力分布如图5所示(图中以向右为纵向正方向,下同)。由图5可知,轮胎在直线滚动状态下,轮胎接触情况与文献[20]结果相似,故所建模型能够反映轮胎状态与地面接触情况。
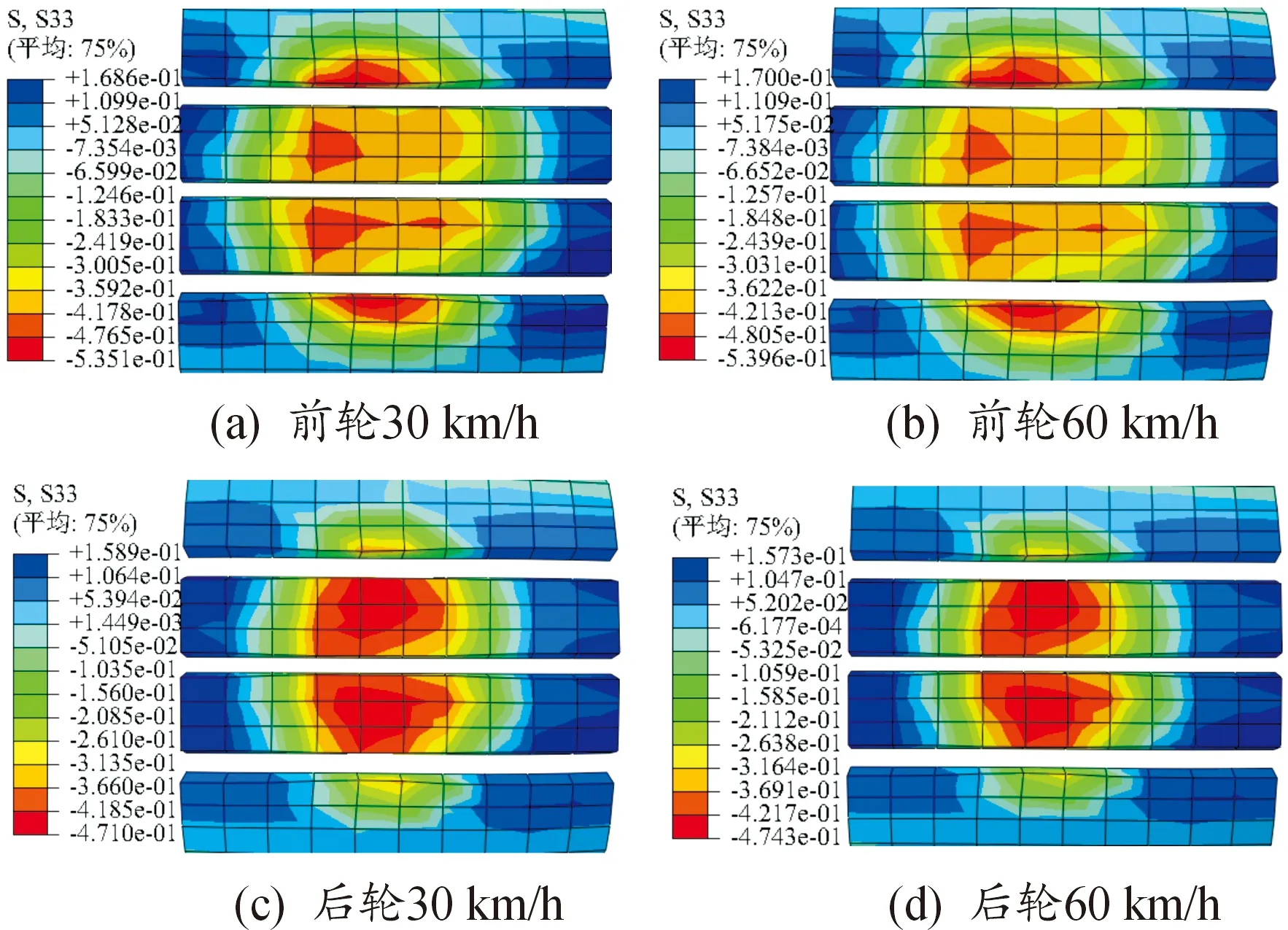
图5 前轮与后轮直线滚动法向接地应力云图
3 偏转滑移转向工况仿真
根据表2电动轮受力计算结果,对电动轮汽车当内侧车轮偏转30°,分别以速度为30、60 km/h转向行驶时,利用所建轮胎-路面模型进行仿真。
3.1 接地印迹分析
由图6可知,电动轮汽车以30、60 km/h向左转向时,右侧相对左侧轮胎与地面接触印迹较大,形状更接近呈圆形;且后轮相对前轮轮胎触印迹每条纵向花纹在横向方向向外有明显扩大趋势,沿横向方向基本呈对称分布。60 km/h相对30 km/h转向工况,电动轮汽车各车轮轮胎接地印迹相对较小,且左侧、右侧前、后轮接地区域接触压力峰值分别减少0.040、0.196 MPa,增加0.463、0.122 MPa。

图6 接地区域印迹分布
3.2 接地法向应力与应变分析
3.2.1法向应力分析
由图7可知,电动轮汽车以30、60 km/h转向时,所有车轮轮胎接地区域法向应力均沿横向方向呈基本对称分布,且左侧车轮轮胎较大应力区分布相对集中于接地中心,右前轮轮胎的接地区域法向应力值相对较大。60 km/h相对30 km/h转向工况,电动轮汽车右侧前、后车轮轮胎接地区域法向应力分布区域增大,且峰值分别增加0.004、0.054 MPa,而左侧前、后车轮变化情况则相反,其接地区域法向应力区域减小,且应力峰值分别减少0.008、0.171 MPa。

图7 接地区域法向应力
3.2.2法向应变分析
由图8可知,电动轮汽车以30、60 km/h转向时,各车轮轮胎接地区域法向应变大大超出轮胎-地面接触面积,沿纵向方向基本呈对称分布;左侧车轮轮胎接地区域最大法向负应变分布面积相对较小;右前轮轮胎的接地区域法向绝对应变相对较大,分别达0.112、0.103。60 km/h相对30 km/h转向工况,左前轮较大法向应变区域面积减小明显;左后轮胎接地区域法向应变最大值下降最明显,达0.014。

图8 接地区域法向应变
3.3 接地横向应力与应变分析
3.3.1横向应力分析
由图9可知,电动轮汽车以30、60 km/h转向时,所有车轮轮胎接地区域横向应力横向方向呈基本对称分布;右前轮轮胎接地区域横向应力值相对较大,且横向应力最大值出现在靠近胎肩处。60 km/h相对30 km/h转向工况,电动轮汽车左侧车轮横向应力峰值均下降,且左后轮横向应力峰值下降明显,达0.219 MPa。
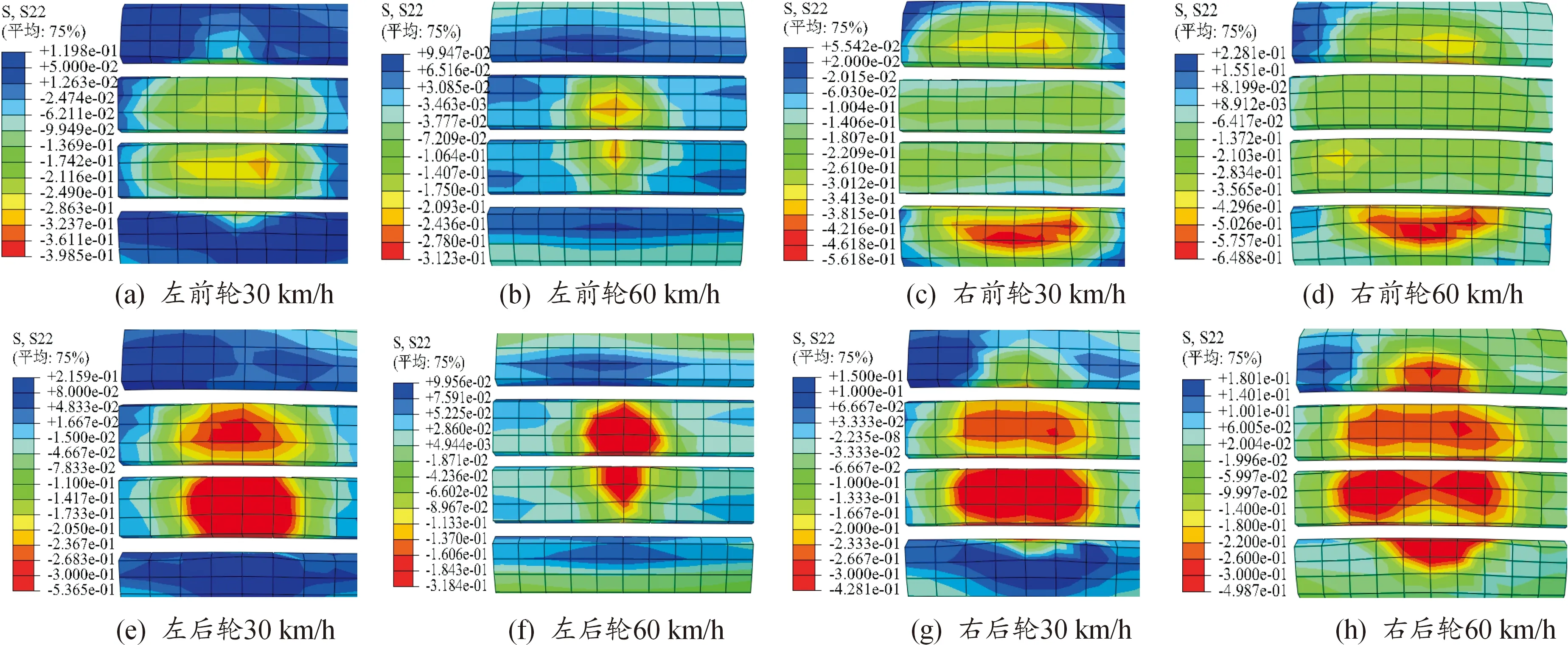
图9 接地区域横向应力
3.3.2横向应变分析
由图10可知,电动轮汽车以30、60 km/h转向时,两后轮轮胎接地区域横向应变分布沿横向方向基本对称,而两前横向应变分布无该现象;且右前轮轮胎的接地区域横向绝对应变相对较大,分别达0.119、0.116。60 km/h相对30 km/h转向工况,左前轮轮胎的接地区域横向应变峰值下降最明显,达0.037;左侧车轮轮胎接地区域横向应变较大的位置发生较大变化;而右侧前轮应变区域面积沿横向方向在各胎肩、胎面区域内逐渐增加。
图10 接地区域横向应变
4 结论
通过建立电动轮汽车轮胎-路面接触有限元模型,计算电动轮汽车以30、60 km/h向左偏转滑移转向工况时各轮胎接地印迹、应力和应变,得出以下主要结论:
1) 右侧相对左侧轮胎与地面接触印迹较大,后轮相对前轮轮胎接触印迹每条纵向花纹在横向方向向外有明显扩大趋势,沿横向方向基本呈对称分布;60 km/h相对30 km/h转向工况各车轮轮胎接地印迹相对较小。
2) 各车轮轮胎接地区域法向应力、应变分别沿横、纵向呈基本对称分布,且左侧轮胎较大应力区分布相对集中,右前轮轮胎接地区域法向应力值相对较大;60 km/h相对30 km/h转向工况左、右侧轮胎接地区域法向应力分布区域、峰值均分别呈现减小、增大现象。
3) 各车轮轮胎接地区域横向应力在横向呈基本对称分布;右前轮胎的接地区域横向应力绝对应变较大,且横向应力最大值出现在靠近胎肩处;60 km/h相对30 km/h转向工况左侧轮胎接地区域横向应力、应变均下降。
