一种空潜蓝绿激光通信双盲均衡方法
2023-11-14毛忠阳徐雪颖陆发平沙丹丹
毛忠阳,徐雪颖,陆发平,沙丹丹
(海军航空大学,山东 烟台 264001)
0 引言
近年来,随着业界对无线光通信研究的不断深入,无线光通信不受电磁干扰的影响、保密性高、频谱资源丰富、带宽大、速率高等优良性能逐渐被发掘[1],特别是蓝绿激光通信。得益于蓝绿激光波段处于“海水窗口”中,能够以较低损耗穿透海水,以及不受频谱带宽限制的优势[2-4],蓝绿激光通信能够实现高速、高保密性通信,这是射频通信和水声通信无法匹敌的,它为机载对潜通信提供了1种极具发展前景的新型通信方式。
然而,在机载蓝绿激光对潜通信系统中,激光在空潜链路中通常传输距离较远,激光光束的传输受大气信道、海水信道等不同类型的环境信道影响。例如在大气信道中,激光光束易受云、雾、雨等大气条件影响,空气中的气溶胶颗粒和各种分子对光子吸收或散射,这就是大气衰减效应,其削弱了激光信号的能量[5]。大气湍流效应是指空气中局部温度冷热不均或者存在压强随机变化,形成一个个气体漩涡[6]。大气的吸收、散射、折射和湍流效应会使光波产生畸变,形成脉冲展宽,进而导致码间干扰,严重限制了蓝绿激光通信系统应用。此外,在海水信道中存在浮游植物和黄色物质等溶质,激光光束极易出现能量衰减和散射,微粒对激光的吸收是导致激光能量衰减的主要原因。多次散射会出现多径效应,出现时域展宽现象[7],这将极大影响通信系统的性能。因此,如何有效抑制码间干扰、提高系统性能,已成为机载蓝绿激光对潜通信面临的挑战之一。
在无线光通信领域,抑制码间干扰通常采用信道均衡的处理方式。传统的均衡方法主要有基于训练序列的自适应均衡和无需训练序列的盲均衡[8]。训练序列均衡通常采用Window 和Hoff 提出的最小均方(Least Mean Square,LMS)算法[9],该算法具有较强的鲁棒性,计算简单,但是要发送训练序列,消耗额外的带宽;盲均衡算法中应用最广泛的是恒模算法(Constant Modulus Algorithm,CMA),其不占用额外带宽,但在稳态阶段具有较大的均方误差(Mean Square Error,MSE)[10]。针对上述传统均衡算法的不足,相关领域专家学者提出了一系列改进方法:李宇坤等提出了变步长CMA,用以解决CMA 迭代步长固定且收敛速度慢的问题,将系统误码率降低了2个数量级[11];卫晨等通过实验验证50 Mbps 开关键控(On-Off Keyed,OOK)调制信号在可见光通信中传输,通过变步长CMA 均衡器可将误码率降低到8×10-4[12];杨方明等将可变步长常数模均衡算法和判决引导最小均方算法(Decision-guided Least Mean Square,DD-LMS)的输出结果根据混合参数进行凸组合,提出1 种变步长的自切换双模式盲均衡算法,首次用于抑制水下蓝绿激光通信码间干扰[8,13]。但是由于该均衡方法产生了新的混合参数,其计算复杂度较高,仅用于抑制蓝绿激光海水信道造成的码间串扰,并没有考究其能否抑制蓝绿激光通信中因大气信道、气-海交界造成的码间串扰。
针对空潜蓝绿激光通信面临的码间干扰严重的问题,鉴于变步长的自适应双模式盲均衡算法在消除水下蓝绿激光通信码间串扰方面具有的优势,本文通过对空潜蓝绿光通信系统信道进行剖析,将其引入空潜蓝绿激光通信。为保证算法具有较小的MSE 和较好的收敛速度[14],进一步结合了可变步长恒模算法和基于分数间隔均衡的DD-LMS 算法,提出了1 种适合空潜蓝绿激光通信的双模盲均衡方法,有效抑制了码间串扰,从而提高了系统性能。
1 空潜蓝绿激光信道特性分析
空潜信道中含有各种各样且分布广泛的分子和杂质微小颗粒。光子在信道中传输时,碰到这些微小颗粒时会产生相互作用,发生散射和吸收,导致接收端信号衰减和时域展宽,如图1所示。
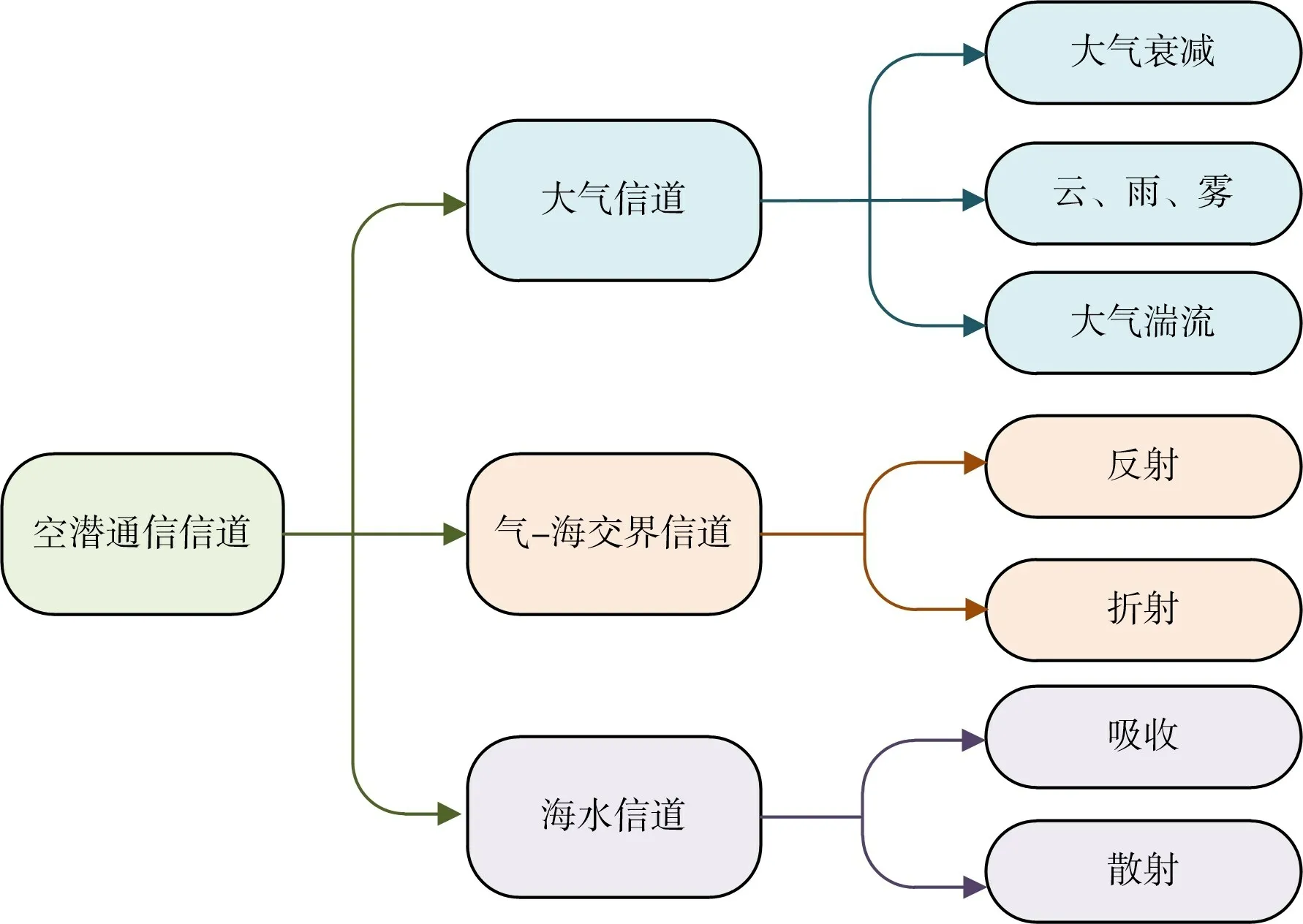
图1 空潜通信信道对光束的影响Fig.1 Impact of air-submarine communication channel on beam
在忽略湍流影响的情况下,空潜信道的衰减模型可以表示为[15]:
式(1)中:PT为发射信号光功率;PR为接收信号光功率;DT和DR分别为激光器发射孔径和接收孔径;θ为激光光束发散角;Ht为大气信道长度;hr为海水信道长度;T 为空潜信道中总的能量透过率。
T 可以表示为:
式(2)中:Ta为大气透过率;Tc为云层透过率;Tf为海雾透过率;Ti为界面透过率;Ts为海水透过率。
由空潜通信信道构成及式(1)(2)所示的空潜信道的衰减模型不难发现,蓝绿激光的衰减程度、码间干扰程度不仅受海水信道影响,还受大气信道、气-海界面的影响。因此,要抑制空潜蓝绿激光通信信道特性造成的码间干扰,须同时考虑大气信道、气-海界面、海水信道的影响。
2 双模盲均衡方法基本原理
图2 为空潜蓝绿激光通信双盲均衡方法原理框图,其包含分数间隔、切换条件、均衡方法等3 个模块。与传统均衡方法采用波特间隔不同,所提方法采用分数间隔均衡;与传统均衡方法采用单一均衡算法不同,所提方法同时采用变步长CMA盲均衡、变步长DD-LMS 盲均衡这2 种均衡算法,依据给定的误差信号k 次差值门限,灵活切换。

图2 空潜蓝绿激光通信双盲均衡方法原理框图Fig.2 Principle block diagram of double-blind equalization method for air-submarine blue-green laser communication
2.1 分数间隔盲均衡
不同于传统的波特间隔均衡器,分数间隔均衡器(Fractionally Spaced Equalisation,FSE)具有不低于奈奎斯特频率的采样速率,可解决因采样不充分而引起的频谱混叠问题。为方便计算,本文采用四通道的分数间隔采样模型,如图3 所示。其核心思想是采用波特间隔采样频率的4倍对接收信号进行过采样。该过采样信号包含更详尽的信道信息,能有效抑制噪声的放大,因而具有收敛速度快、稳态误差小等优点[10]。
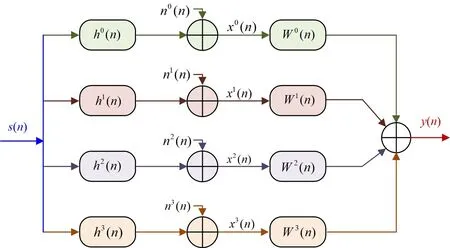
图3 分数间隔采样的四通道模型Fig.3 Four-channel model of fractional interval sampling
可以证明,FSE 可等效于具有符号间隔采样的四通道模型。图3 所示的四通道模型中,子信道i(i=0,1,2,3) 的输出是:
用矩阵表示为:
式(4)中,C 是通道矩阵。FSE的输出为:
式(5)中:h=CwT是系统(信道均衡器)的脉冲响应;v=wTn 是系统的噪声。
2.2 双盲均衡方法切换条件
在双模式盲均衡算法中,2 种均衡算法的切换时机的选择是影响系统性能的1个关键点。在目前已有的双模式盲均衡切换的方法中,以决策圆为基础的切换方法[16]是以发射信号的星座图来进行判决的,适合正交幅度调制(Quadrature Amplitude Modulation,QAM)、正交相移键控(Quadrature Phase Shift Keying,QPSK)的调制信号,而空潜蓝绿激光通信系统中更多采用的是光强度调制,不涉及虚部信号,故不适用于以决策圆为基础的切换方法;基于输出误差符号判决的切换方法[17]在信道环境干扰大、信噪比较低的情况下容易发生误判,在CMA 盲均衡未达到真正的收敛状态时切换算法,影响系统性能;利用凸组合代价函数的切换方法[12,18-19],是构建新的代价函数进行多次迭代运算,由于引入了新的可变参数,导致算法的复杂度高,运算量大[20]。为了解决上述问题,在现有的双模盲均衡切换的基础上,提出了1 种由盲均衡算法迭代误差差值eΔ( n )控制切换时机的方法。
本文所提改进后的切换方法由盲均衡算法迭代误差差值eΔ( n )控制切换时机,eΔ( n )可以表示为:
式(6)中:eC( )n 为变步长CMA 盲均衡算法当前的误差;eC(n-k )为算法迭代k 次前的误差;eΔ( n )为迭代误差的差值;k 值可根据特定的信道环境来设置。
当eΔ( n )小于或等于阈值ε1时,说明当前的CMA盲均衡算法已经处于收敛状态,可以切换到DD-LMS盲均衡算法。使用由盲均衡算法迭代误差差值eΔ( n)控制切换时机的方法,即使在低信噪比下也适用,从而减小了切换时机误判的概率。当前均衡算法权系数迭代为:
2.3 双模盲均衡方法信号处理流程
所提空潜蓝绿激光通信双盲均衡方法处理流程主要分为4步。
步骤1:以T/4(T 为码元周期)的采样速率对接收到的信号进行采样;将采样后的信号序列进行均衡处理;将均衡后的信号序列恢复成以码元周期为T 的输出信号。
步骤2:开始阶段首先使用CMA盲均衡方法进行迭代运算。鉴于CMA盲均衡稳态MSE和收敛速度之间的矛盾:步长大,收敛速度快,稳态MSE大;步长小,达到收敛状态速度慢,稳态MSE小。通过改变固定步长的方式对均衡方法的收敛速度和剩余稳态MSE 进行优化。选择用误差函数控制步长变化:当误差e( n)大时,步长大,收敛速度快;随着e( n )的降低,步长随之变小,并降低算法的稳态MSE。即:
式(8)中:F、G 这2个控制参数可以使步长因子与误差信号之间的关系更加可控,且要求参数满足F >0、0 <G <μmax。
图4 给出了参数F 变化时,μCMA( n )和e( n )的关系曲线。

图4 G=0.08 时,F 取不同值时步长变化Fig.4 Step change when F takes different values for G=0.08
从数值仿真结果可知:当F 较小时,步长较小,灵敏度较低,导致收敛速度较慢;当F 较大时,阶跃变化的灵敏度较高;F 过大可能会导致通信系统的稳态不平衡;当F=0.000 9 时,误差最小。
在此基础上,图5给出了当F=0.000 9、参数G 变化时,μCMA( n )和e( n )的关系曲线。
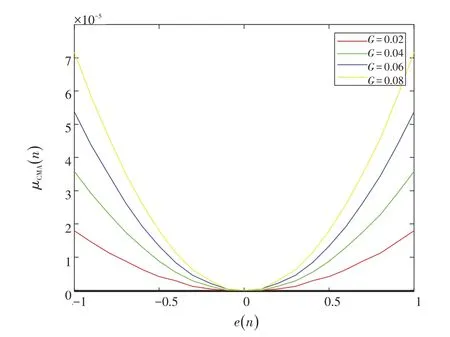
图5 F=0.000 9 时,G 取不同值时步长变化Fig.5 Step change when G takes different values for F=0.000 9
从数值仿真结果可知:参数G 越小,步长因子μCMA( n )的取值范围越小,收敛速度越慢;G 越大,步长因子μCMA( n )的取值范围越大,收敛速度越快。当G=0.08 时,误差最小。
因此,为均衡处理取得更快的收敛速度,设置参数F=0.000 9、G=0.08,此时μCMA( n )和|e( n )|的性能最好。变步长CMA盲均衡权重系数的迭代如下:
式(9)中:w()n+1 为下一刻更新的均衡器权重系数;w( n )为当前时刻均衡器权重系数;μCMA( n )为梯度下降法中可变步长因子,用于控制算法的收敛速度和稳定性;u( n )为传输信号。
步骤3:计算变步长CMA盲均衡当前误差与k 次前迭代误差的差值。若该差值大于ε1,继续使用变步长CMA 盲均衡进行均衡处理;若该差值小于或等于ε1,则说明变步长CMA 盲均衡算法己经处于收敛状态,将算法切换到变步长DD-LMS 盲均衡,并执行步骤4。
步骤4:计算变步长DD-LMS盲均衡当前误差与k次前迭代误差的差值,设置阈值ε2。若当前差值小于或等于ε2,则说明变步长DD-LMS盲均衡已处于收敛状态,停止运行算法的迭代运算,此时MSE 达到最小值;否则继续使用变步长DD-LMS盲均衡进行均衡处理。
3 系统性能分析
为验证所提方法性能,本节从均衡前信号分布、不同信噪比下均衡的收敛速度2 个方面,对比分析所提方法与经典的CMA盲均衡、传统的CMA+DD-LMS盲均衡、CLMS均衡间的性能差异。
3.1 仿真条件
为更加公平、更好地展现所提方法在抑制空潜蓝绿激光通信码间干扰方面的性能优势,统一在空潜蓝绿激光通信系统中分析不同均衡方法的系统性能。空潜蓝绿激光通信系统整体参数如表1所示。
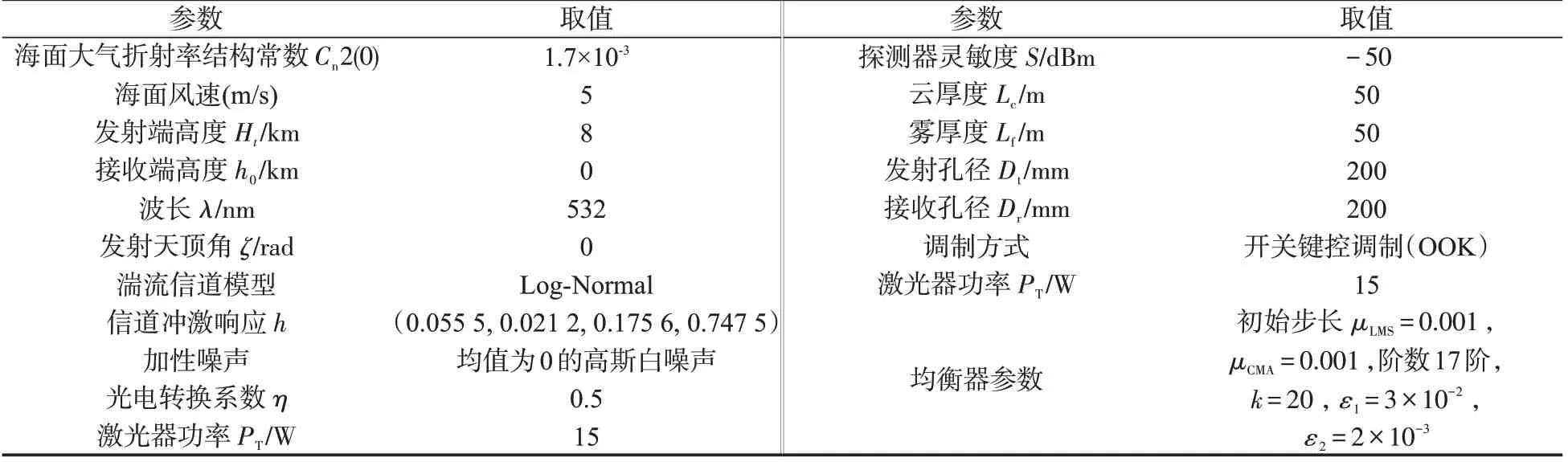
表1 空潜蓝绿激光通信系统仿真参数Tab.1 Simulation parameters of air-submarine blue-green laser communication system
3.2 仿真结果与分析
3.2.1 信号序列散点图
所提方法均衡处理后,信号序列图如图6 所示。从数值结果可知,与均衡前信号序列分布的分散无序不同,经过所提均衡方法处理后的信号序列很集中,基本处于“1”和“ -1”处,所提方法能够有效降低信号序列的幅值分散程度,且信号幅值分布集中程度优于CMA 盲均衡。这表明所提方法能够有效降低空潜蓝绿激光通信码间干扰。
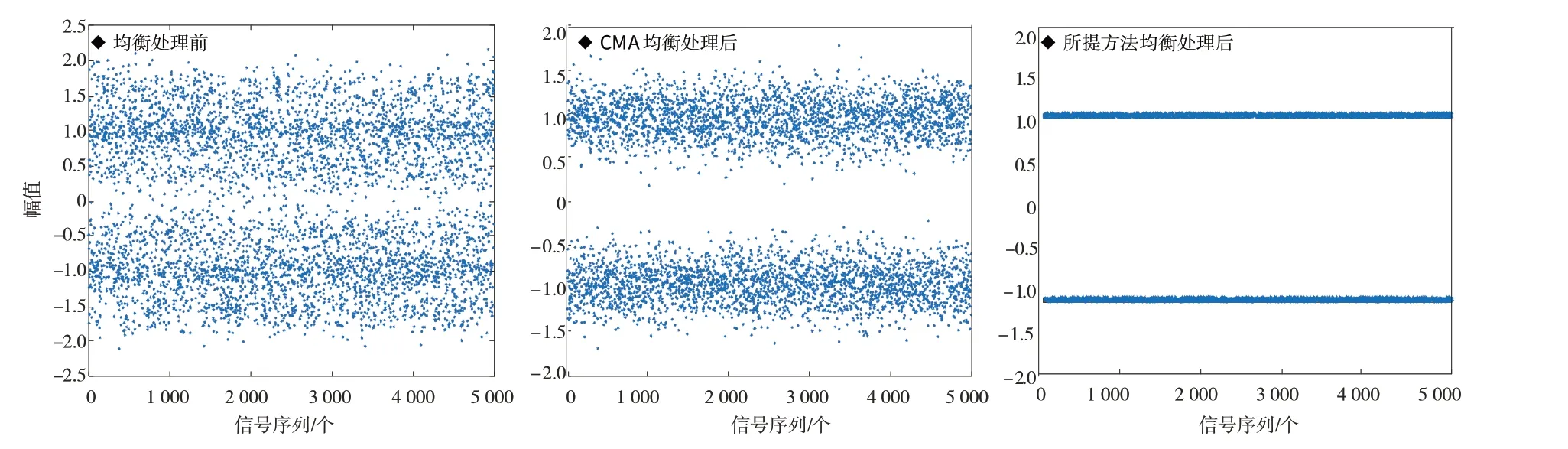
图6 不同均衡方法均衡前后信号分布图Fig.6 Signal distribution before and after equalization by different equalization methods
3.2.2 均方误差收敛曲线
所提方法与CMA盲均衡、传统的CMA+DD-LMS盲均衡、CLMS均衡的均方误差收敛曲线对比,如图7所示。

图7 不同信噪比条件下均衡算法的MSE对比图Fig.7 Comparison of MSE of equalization algorithm under different SNR conditions
从仿真结果可知:
1)所提方法具有更小的稳态MSE,且随着信噪比提升,所提方法的稳态MSE 不断减小。例如:当信噪比为10 dB时,所提方法的稳态MSE为9.38×10-3;当信噪比为20 dB 时,所提方法的稳态MSE 为6.71×10-4,均小于CMA盲均衡、CMA+DD-LMS盲均衡和CLMS均衡的稳态MSE。
2)所提方法具有更快的收敛速度。其迭代次数约为2 500 次,少于CMA 盲均衡、传统的CMA+DDLMS盲均衡和CLMS均衡的迭代次数。
以上结果表明,空潜蓝绿激光通信系统中,相对于经典的均衡方法,所提方法不仅能有效抑制码间干扰,还降低了稳态MSE,提高了收敛速度。同时,自适应性也得到了提高,即便在低信噪比条件下,依旧能够稳定工作。仿真得到不同信噪比下的误码率如图8所示。

图8 误码率性能对比图Fig.8 Comparison of performance of bit error rate
当误码率为10-4时,传统的CMA+DD-LMS 算法信噪比为19.8 dB,本文算法的信噪比为18 dB,获得了1.8 dB的信噪比增益,优于未均衡时算法的性能,误码性能有了较大的提升。
4 结论
本文提出了1种适合空潜蓝绿激光通信的双模盲均衡方法,用于抑制因信道多径效应、高功率光源和高灵敏度探测器带宽限制造成的码间干扰。该方法采用将可变步长恒模分数间隔均衡算法和判决导向最小均方算法相结合的方式,有效抑制了码间干扰,提高了系统性能。同时,相对于经典的均衡方法,所提方法具有更小的稳态MSE、更快的收敛速度。但值得注意的是,所提方法的双模盲均衡切换条件阈值需要人为提前设定。因此,如何依据系统性能需求,自适应选择合理阈值,进一步提高均衡处理的自主性、适应性,是下一步探究的方向,也是需要关注的重点内容之一。
