基于双轨探伤车的多功能组合搬运车设计与实现*
2023-11-13丁旭升陈荣昭陈坤裕
丁旭升,陈荣昭,陈坤裕
(广东汕头超声电子股份有限公司超声仪器分公司,广东汕头 515041)
0 引言
目前,国内自主研制的双轨式钢轨超声波电动探伤车,具有优秀的缺陷检测能力和精度,车子行驶稳定性高,拆装方便快捷,适应43~75 kg/m多种轨型,能对高铁、地铁和普铁等在役钢轨线路进行全方位检测钢轨内部缺陷[1]。现有的双轨式钢轨超声波电动探伤车均采用可快速拆装分体式设计。由探伤工将车体、前桥和后桥分拆后,进行分开搬运。从高铁站、地铁站的入口到钢轨线路,路途曲折,关口狭窄,楼梯多变,通常需要4人同时协力进行平放搬运;当途经多层楼房之间的电梯门时,因这种探伤车的车体宽度大于电梯门的宽度(一般只有1.1 m),无法平放搬入电梯门内,需车体倒立侧身出入,再加上其整体质量仍十分笨重,耗时耗力,相当不方便。到达待检测的钢轨线路后,仍需手动搬放到铁轨上并快速组装。探伤作业完成后,还得把双轨式钢轨超声波电动探伤车就地快速分拆,从钢轨线路搬运到高铁站、地铁站的入口,再用卡车运走。劳动强度大,易疲劳,对探伤工的体能要求很高,大大增加了工作时间和人力资源。有限的天窗时间,低下的工作效率,极易影响工作进度[2]。
现有市面搬运小车能在机动车辆不便使用的地方、狭小空间、短距离搬运较轻的物品时十分方便[3-5];电动搬运车能在宽广空间、长距离搬运较重物品时有着安全省力、搬运效率高等特点,能满足企业大部分作业场景的需求[6-8]。但还没有一款搬运车能够快速把笨重车体轻松倒立侧移进电梯进行搬运。为此,本文提出一种用于探伤车的多功能组合搬运车,仅需2 人就能够进行平放或倒立推移车体,减少劳力,省力且安全,提高搬运效率,便于人工搬运。
1 设计原理
搬运车采用平板车与手推车相结合设计,首要用于搬运EGT-60 型双轨式钢轨超声波探伤仪的车体,或是直接用于搬运随车配附件(诸如:水桶、驱动电池、仪器电池、仪器主机和显示器等),提起、翻转、移动、爬梯都是依托人力来完成。其作业原理如下。
(1)在提起车体时,是起了杠杆作用。如图1所示,支点在轮子的轴心,动力是人施的力F,阻力是总重力G。由力的作用线到支点的距离叫做力臂,动力臂L1,阻力臂L2。根据公式F·L1=G·L2可得力臂越长力就越小。由于L1>L2,可得F <G,所以是省力杠杆。
(2)同理可推导出在翻转车体时也是省力的,如图2 所示。
(3)在倒立移动车体过程中,搬运车是平动的,如图3 所示,把滑动摩擦变成滚动摩擦,不起杠杆作用。

图1 省力杠杆原理

图2 车体翻转
(4)搬运车体爬楼梯时,搬运车的转腿轮可替换成3 轮(或3 轮以上)的轮辐。在结构空间允许条件下,轮数越多,爬行越平稳。如选用5 轮(五角星形的轮辐端头均装有一只小轮子)上下楼时,轮辐上的5 对轮子的辐条轮流着地。由于采用了5 对轮子,每对轮子的间隔为72°,上楼时,前一对轮子的辐条达到垂直位置前,即重心还未稳,下一对轮子已经接触到上一个阶梯,因而上下楼时不产生冲击和跳跃现象,犹如走平地一样平稳。对于不同高度及陡度的阶梯,只需调整辐条长度就能达到同样平稳的走行效果[9-10]。一人在车体头部推,另一人在车体尾部拉,即可实现爬梯。
2 硬件组成
多功能组合搬运车由搬运车和移动架构成,这两个组件可以独立使用,也可以组合使用。可以平放移动,也可以倒立移动,一车两用,两种使用状态,可根据需要选择。
2.1 搬运车

图3 车体倒立
搬运车主要由伸缩车板、抓臂、转腿和抓扣等构成。能轻松折叠,瞬间变小身材,如图4~5 所示,方便包装运输。

图4 搬运车全展开状态

图5 搬运车全收缩状态

图6 伸缩车板
2.1.1 伸缩车板
伸缩车板是由现成外购可伸缩搬运车改造而成,去掉原配的扶手,然后两侧加装座架,如图6 所示。伸缩车板包括相互对接的第一支撑板、第二支撑板和第三支撑板,它们可沿车板长边方向、或宽边方向相对伸缩移动并在极限位置自锁,从而可以根据具体情况扩大或缩小承载面积,可适用于不同场合[11]。第一支撑板和第二支撑板底下各装有2 个平底万向轮,中间第二支撑板底下装有2 个平底定向轮。支撑板上还粘贴有防撞硅胶板来保护双轨车头。每侧座架设有2 个防撞转轮,既可以在搬运车平移时防撞,也可以在搬运车竖移时作为脚轮,方便运输。
2.1.2 抓臂
抓臂由支撑杆、定凸轮、导向管、扭簧和限位套组成。左右两个抓臂分别安装在伸缩车板两侧支撑板的支座上,绕着支座上的固定轴,可以实现0°~90°的可收缩动作,如图7 所示。
2.1.3 转腿
转腿主要由转柱、动凸轮、大平垫、折叠铰、轮架和静音脚轮等组成。通过折叠铰,能实现0°立腿(图8)和90°抬腿(图9),并带自锁的两个动作。紧固在抓臂上的扭簧连接转腿动凸轮,当抓臂收缩或是伸展时,扭动动凸轮,使转腿围绕抓臂的导向管同步实现0°~90°的收缩或是伸展,并带自锁的两个动作。

图7 抓臂

图8 立腿
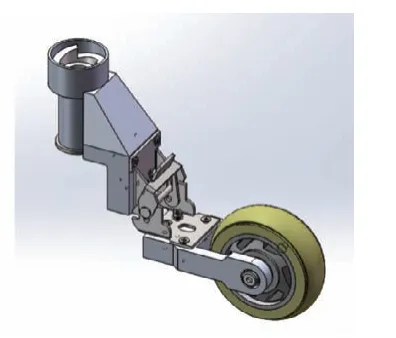
图9 抬腿
2.1.4 抓扣
抓扣主要由拉杆、快速搭扣(带自锁)、快卸销、丝杆静音万向脚轮和硅胶板等组成,如图10 所示。抓扣为可拆卸,可每间隔90°旋转锁紧设计。按住快卸销的按钮,把抓扣插入到抓臂的限位套上,松开快卸销的按钮,抓扣就紧固在抓臂上。抓臂咬住抓扣后,可以通过抓扣的快速搭扣把车体紧固在搬运车上。

图10 抓扣

图11 移动架
2.2 移动架
移动架主要由1 个支撑架、2 个包胶滚筒、2 只丝杆万向脚轮和2 只丝杆刹车脚轮等组成,用于搬运双轨车的前桥和后桥,每条桥配备2 个搬运架(图11)。
3 控制系统
3.1 搬运车的控制
走平地或是进电梯,需要车体倒立搬运,如图3 所示。搬运车装载车体并移动到目的地,可参照从(1)→(4)控制步骤操作;当卸下车体时,可反向按(3)→(1)控制步骤操作即可。
(1)车体平放于地面上,搬运车倒立从车头插入车体,如图12 所示。

图12 插入车体
(2)搬运车紧贴车头后,车体两侧扣上自锁搭扣(图1),把车体与搬运车锁紧。
(3)把搬运车底下的万向刹车脚轮刹住。两人在车体尾端用力抬起车体,让车体以搬运车的转腿轮为支点翻转(图2),最后倒立平放于地面(图3)。
(4)由于搬运车底下前后各2 个万向刹车脚轮和中间2 个定向脚轮着地,所以沿着车板长边方向可采用前拉后推的控制方式。车体哪侧在前,哪侧在后,由用户喜好而定。手推车体侧面(类似扶手),很轻松就移动到目的地。

图13 移动架工作状态
3.2 移动架的控制
把移动架放置于走行轮下面,让凸轮缘置于限位槽里,并处于包胶滚筒上(图13),再用绳子把走行轮和移动架绑住,防止走行轮因激烈跳动而脱离移动架。双手推着限位杆带动前桥(或是后桥)移动到目的地。若需要停放有坡度地面时,刹车脚轮需刹车,防止溜坡。
3.3 组合车的控制
搬运车体上比较陡的坡度时,为安全起见,可以降低重心选择“1 辆搬运车+2 个移动架”的组合方式。组合搬运车装载车体并移动到目的地,可参照从(1)→(5)控制步骤操作。
(1)车体平放于地面上,搬运车倒立从车头插入车体,见图12。
(2)搬运车紧贴车头后,车体两侧扣上自锁搭扣,把车体与搬运车锁紧。
(3)抬高车体前端,再按住转腿上折叠铰的按扣把折叠铰从展开状态转变为折叠状态,让转腿蹬高,如图9和图14 所示,即转腿状态从立腿转为抬腿,再下放车体前端着地。

图14 组合搬运车蹬高动作
(4)抬高车体尾端,把两个搬运架放置于车体下面,让车体后端支脚置于限位槽里,并处于包胶滚筒上(图15),再用绳子把支脚和搬运架绑住,防止支脚因激烈跳动而脱离搬运架。
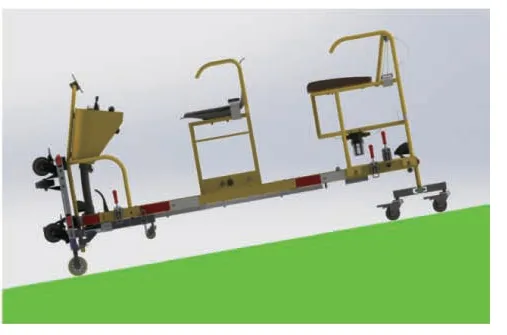
图16 组合搬运车爬坡状态

图15 组合搬运车平动状态
(5)由于搬运车左右两侧的转腿定向脚轮着地,搬运架所有万向脚轮着地,所以适合推车头拉车尾的控制方式搬运。即手推车体前端或是手拉车体后端在平地移动或是爬坡(图16)到目的地。
4 测试验证与结果分析
组合搬运车的样车研制出来后,搬运车和移动架的参数分别见表1 和表2,并完成了出厂测试。测试是以在厂区内搬运EGT-60 型双轨式钢轨超声波探伤仪的车体进行各种试验为主。
(1)提起、翻转测验。由2 人按照前文3.1 节步骤(1)→(3)操作,实现将车体提起、翻转,耗时20 s。随之熟练程度增加,耗时持续缩短。
(2)平稳性测试。1 人手拉车体侧面在前,另1 人手推车体侧面在后,进行各种复杂地形移动测试。不管途径平路还是泥路、坡路,推拉起来都很省力轻松,车体不摇晃。
(3)狭小空间搬运测试。电梯空间为长1.5 m ×宽1.1 m×高2.1 m,车体倒立搬运的空间为长1.2 m ×宽0.92 m ×高2 m,很轻松就进入电梯里,上下楼层很方便。
(4)组合车搬运测试。由2 人按照前文3.3 节步骤(1)→(4)操作,耗时25 s。不但平地移动车体很稳,就是途径比较陡的坡度时,车体重心也非常稳。
试验结果表明该车各方面性能完全满足预期设计要求。

表1 搬运车参数

表2 移动架参数
5 结束语
本文通过对省力杠杆的运用,集合可伸缩平板车与可折叠手推车的功能特点,设计出一种适应于双轨探伤车的多功能组合搬运车,解决了双轨式钢轨超声波电动探伤车从站口到钢轨线路之间的往返路途人工搬运难题。实际测试表明,该组合车能够在复杂的地形稳定运行,可以平放移动,也可以倒立移动,还可以轻松折叠,省力且安全,大大提高搬运效率,并具有低成本和易操作等特点,这也对传统搬运车升级改造具有一定的实用和推广价值。但是,本代产品在轻质化、多用途上有待提升。下一步,将不断改进优化,力求精益求精,尽最大努力满足用户个性化需求,同时尽可能降低成本,保持核心竞争力。