增程式电动车的燃油效能分析
2023-11-13陈邦柱晋伦伟廖文霞
林 昌,陈邦柱,晋伦伟,廖文霞
(1.莆田学院机电与信息工程学院,福建莆田 351100;2.莆田学院土木工程学院,福建莆田 351100)
0 引言
纯电动汽车(EEV)相对于普通燃油汽车,能够真正达到零尾气、零排放的环保程度,EEV 的动力机器为电动机靠蓄电池产生的电能来驱动汽车。燃料电池汽车(FCV)用电能来带动FCV汽车;燃料电池汽车同时也面临着许多问题,其技术的安全性、可靠性方面仍然存在很大的改善空间。燃油汽车给人们带来了经济的飞速发展和交通的便利,与此同时,普通燃油汽车的尾气排放,已导致温室效应、酸雨等问题。人们不得不创造出一种既环保,又低耗的电动汽车;由于电动汽车会面临电量不足,里程较短的问题,后期增程式汽车(REEV)增加了一个内燃机以克服电动汽车里程短的问题,大大提高了续航能力[1]。混合电动汽车(HEV)比一般的电动汽车的动力强,做到了比燃油汽车油耗低、污染小的环保标准,但并未真正做到零污染、零排放。增程式汽车弥补了普通燃油汽车污染严重、里程短的缺陷[2]。
根据以上分析,混合动力电动汽车电池驱动功能的实现会涉及到微处理器工业领域的技术,更新电动机能源的利用和开发。国家出台了一系列举措,使得研究者们更关注于研究定期控制系统、高级别电动机,电动汽车的实用化。混合车辆的开发不再是汽车行业的一项简单的技术创新,而是汽车行业的一场新革命。
1 混合动力电动汽车的分类及特点
1.1 有关定义
混合动力汽车系统由机械配件、电子配件和其他信息系统组成。机械辅助系统包括底盘和车身、驱动器、转换器和电源箱等。电子辅助系统包括能源、电网、系统马达控制;信息系统主要使用通信网络并用数据处理算法处理驾驶者的意愿、车辆的运行监控、电机控制等。混合电动汽车基本结构如图1所示。
1.2 基本原理
混合电动汽车的基本原理是内燃机和发动机作为混合动力的来源,所谓混合动力[3],就是在汽油引擎和电动机相互配合的前提下,尽可能做到低排放区使用;其制动是通过改变发电机和发动机的工作原理来实现的,大大提高了汽车燃料的性能。

图1 混合动力电动汽车基本结构
1.3 类型
以前的混合型动力汽车有串联和并联2 种,随着科技的发展,混合式动力汽车如今已经分为4 种,在原有类型的基础上增加了混联式以及复合式。
1.4 串联式混合动力汽车
1.4.1 结构与特点
最初的混合动力汽车发动系统为混合发动机,包括发动机、发电机、电源变压器、电池、发动机和运输设备[4]。如图2所示,该系统的引擎将发动机拉动,机械动力首先通过发电机输出到电力中。电池可为发动机提供电力,使电动汽车能够在无污染的情况下运行混合电动汽车。

图2 串联式混合动力汽车原理
本文中描述的混合电动汽车的驱动电机为永磁性同步发电机。电机硬件结构如图3 所示,该硬件系统用电机控制系统,其中采用同步电机(PMSM)和DSP为核心控制系统,该算法由DSPMS320lf2407a实现。

图3 电机硬件结构
该系统的直流电源是由三菱的IPMPM75CLA060 提供的。用于控制IPM 的PWM 6 信号是由DSP 创建的[5],在被控制器隔离后产生PWM 6 信号,发送到IPM。IPM的输出有用结果为V和W。波长用于控制有引擎的汽车,当接收到失效信号时,DSP 就会立即停止输出PWM 波浪。控制系统只测量了ia和ic两种电流,由传感器la108-p 测量后,经过信号传输,2 个信号通过滤网然后经过低通,再发送到DSP ADC 模块。光电编码器决定了电机的速度及位置,经过分级转换,然后发送到DSP QEP,直接编码QEP 角。总线以别的模块来完成数据传输,通过DSP的采集通道采集电子信号,通过I∕O输入电子蛋糕。
1.4.2 DSP(2407)的简述及其外围电路设计
DSP 芯片有3 种不同分类方式:(1)按其基础特性划分,根据芯片的工作类型划分;(2)按其数据格式划分,根据芯片的数据类型划分;(3)按其使用用途划分,根据芯片的作用类型划分。
本系统采用的TMS320LF2407A 是一种供电电压为3.3 V,功能相对较强,耗能相对较低,运算速度相对较高的DSP芯片。该芯片的特点总结如下。
(1)该芯片的I∕O 的引脚能够达到41 条,同时也拥有一个超集数量达到144个的引脚。
(2)芯片的内存分为两类,分别是ROM 和2 K 字节的单存取RAM:SARAM 与544×16 位字的双存取RAM:DARAM。
(3)寄存器中包含2 个不同状态的寄存器:ST0 和ST1。
(4)可寻址的存储器空间总共含有192 K字节。
(5)总共包含5个外部中断。
(6)EVA、EVB 事件管理模块分别用于控制运动和控制引擎。不同的事件管理模块包括不同的定时钟和单元:WD 为看门狗定时器模块;SPI 为串行外设模块;SCI 为串行通信模块;CAN 为局域网控制器模块;10 为A∕D 转换器,且其转换时间大大缩短。
DSP 等串口不为零标准(NRZ)串行数字通信模式[13],既能够半双工操作,又能多工操作。串行外部接口(SPI)可以直接与其他具有标准SPI 端口的设备通信,芯片也有模块可以与外部设备或其他控制设备进行通信。通过DSP(2407)完成了总系统和点击系统之间的联系:总系统将正常状态查询顺序和速度顺序传递给电力推进系统和粉末系统的电力推进系统报告,应急处理应用的一般状况和问题。
图4 所示为模态控制的结构。为设计一个模糊的控制器,首先要做的是设计输入量,包括属于领域、模糊语言及其语言值,将其模糊化后预设大概的控制规则以进行模糊推理,最后通过反模糊化得到精确的控制,从而完成相对的工作[6]。

图4 模态控制
θr的基本论域为{θ1,θ2,…,θ12},如图5所示。
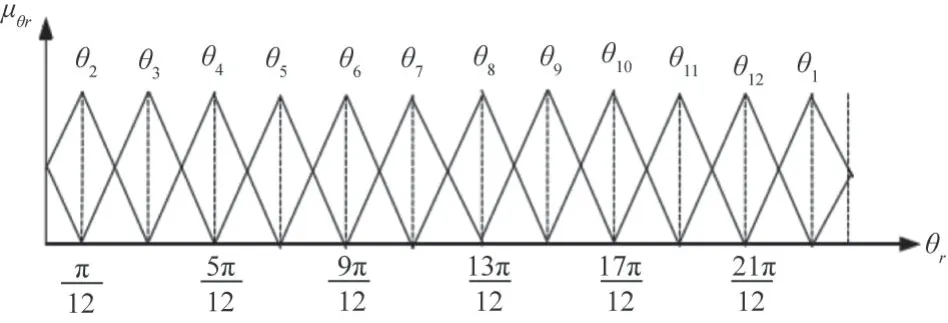
图5 θr的隶属函数
将S作为输出,控制规则采用以下形式:
从而可以推测出模糊规则:在1~θ区间,若想实现很大程度地减少转矩ET,而前提要保证磁链ψs基本不变,则应该选择u6,模糊规则表示为:
换个角度,为实现很大程度地增加转矩ET,同时也要实现磁链ψs有较大的增加,则应该选择2u,模糊规则表示为:
为实现很大程度地增加转矩ET,而前提要保证磁链ψs基本不变,则应该选择3u,模糊规则表示为:
综上所述,则能够总结出在该平面上共有180 条控制规则,如表1所示。
模糊控制的输入、输出量所代表的规则为:
A、B、θr、ui的隶属函数分别用μA、μB、μ(θr)、μ(ui)表示,运用max-min 计算则可以推理出第i条规则的作用强度为:
通过“取小”的运算方式可以推测出第i条所对应的控制决策为:
μui(S) = min[σi,μui(S)]
S的表达式为:
根据上述分析可以得出,单点型的模糊集是模态控制输出电压的形式,可以以电压空间矢量的形式表达,所以已经没必要再进行解模糊的操作[7]。

表1 模态控制规则
2 蚁群算法中的神经网络在直接转矩中的应用
2.1 神经网络的概述
神经网络拥有较强的处理信息能力,可以将神经元之间的重量连接起来,还可以模拟出人类大脑的机制对信息处理的能力[8]。例如有老师指导学习和无老师指导学习是神经网络自身的两种学习方法,这两种学习方法的区别在于是否有一个目标结果与课程输入相对应。大部分的网络神经都是为指导教师所准备的,在指导教师的学习方法中,将结果和期望值相比较,再根据比较结果将二者中的错误函数进行调整,达到最小化故障。网络训练过程如图6 所示。本文所使用的网络是运用社区算法来调整价值的3层网络。
2.2 蚁群算法
在蚁群算法中,模拟器科学家观察并发现信息通过一种叫做信息素的物质移动在个体蚂蚁之间。社区算法就是将蚂蚁的这种移动进行优化:假设有M个参数在网络中等待优化,可将这M个参数意义记为P1,P2,…,Pi,使这其中的参数都满足Pi(1≤Pi≤Mi),在取值范围内把它设置成N个随机的非零数,集合Pi就由这些数值所构成。假定蚁群中的蚂蚁都从集合Pi出发,也就是将集合看作蚁巢,然后根据信息素的状态和路径可以总结出以下公式:

图6 神经网络训练过程
如果从集合Pi中随机的选出任意一个元素,蚂蚁完成了在集合中的选择,也就意味着蚂蚁到达了食物的源头,这就可以用以下公式来做到信息素的调节:
式中:0<ρ≤1 为信息素的持续性能;(IPi)为某一次循环中第k只蚂蚁在某一个集合Pi里的第j个元素上所遗留下来的的信息素;Q为调整速度的常数;ek为最大误差,可将其定义为:
式中:Sn为FNN的实际输出值;Sq为期望输出值。
反复运行上述过程,直到找出最优解才停止,如果进化的趋势已经不明显或者达到了进化的最大次数则代表最优解已被找出。
2.3 蚁群中神经网络的实现过程
蚁群中神经网络的优化在于阈值调整,这个算法有W个蚁群,每个蚁群代表一组权重值和阈值,最大迭代次数是最大值。假设找到变量X是{vki}和{vk0}两个维族,{vki}是将权重从输入层连接到出口层,{vk0}是输入和输出层的阈值。这个优化变量的分量分为n个,在初始时刻,蚂蚁首先选择任意一组权重值与阈值,然后解(n+m+l)h+m的分量,将其视作为顶点,将第一个顶点定义为I的分量,由上述定义则可将I+l 的顶点到I的分量看作是第n个顶点,可以用n个不同的分量来判断。蚂蚁根据每条路径(式(4))的信息和公式选择来决定路径。
相对于本系统来讲,直接控制转矩的最关键点是建立定子磁链观测器;以u-i磁链模型为基础,坐标系αβ中的电压、电流、电阻函数都可以用磁链来表示,它们之间的非线性函数关系可表示为:
在α β坐标系下磁链可写为:
神经网络拥有比较强的非线性系统模拟能力。定子磁链观测器结构可以用图7表示。
网络的输入层一共含有5 个神经元,对应的定子电流分别为iα和iβ,对应的定子电压分别为uα和uβ,Rs为电阻,网络的输出层为ψα和ψβ。程序运行的过程中,会随机给出网络间初始的权值和阈值,因此必须经过大量的实验来确定网络的结构,计算出较为精确的ψα、ψβ值。

图7 定子磁链估算蚁群神经网路结构
2.4 仿真结果分析
通过计算机仿真技术得到在相同工况下传统动力汽车的发动机效率,可以发现以下问题:(1)电动机整体效率明显高于发动机效率[9];(2)对于发动机而言,由于发动机设计原因,在处于额定转数附近时,为设计能量效率最高点,在低转速的区域时效率偏低,对提高发动机整体燃油经济性能有较大的不利影响,对电动机而言,虽然在低转速时因为铜损耗和铁损耗的影响效率相较额定转数时会有所降低,但与发动机的低转速区效率相比要高得多;基于以上两点,可以设计如下提高车辆整体燃油经济性能的具体方案。将发动机作为辅助动力来解决电动机在转矩不足时的问题,同时也选择效率较高的电动机作为主要动力来达到车辆行驶的目的。为便于比较,电机及其仿真条件如图8所示。图9所示为具体的Simulink模型[11]。

图8 PMSM 模糊神经网络直接转矩控制仿真框图

图9 控制策略模型
通过图10和图11可以发现在采用了新的控制策略之后,车辆燃油经济性有了明显的提高,如表2所示。

图10 采用逻辑控制策略的整体仿真结果

图11 采用动态控制策略的整体仿真结果

表2 尾气排放数值g∕km
可以看到通过优化控制策略,采用合理的控制方法可明显提高能量管理系统节能能力。在仿真结果中可以看到,相比于前两种控制策略,最佳区域优化策略将车辆整体燃油经济性提高了约20%,与此同时,尾气中氮氧化合物和碳氧化合物含量都有了明显的降低,这也使得增程式汽车在不改变原有硬件设计的基础上不断优化车辆经济性和环保性能,则可得出结论,能量控制策略作为增程式汽车能量管理系统的核心技术,对于增程式汽车的性能起着关键性的作用。
2.5 小结
首先介绍了蚁群算法的神经网络直接力矩的整个概念,并提供了一个系统图,然后通过与模糊控制法相结合,在蚁群算法的基础上进行仿真。仿真结果表明,基于蚁群的神经网络优化技术具有良好的静态和动态控制永续同步力矩,满足控制系统的快速响应要求。通过仿真数据的对比,增程式汽车的确存在着比普通汽车更好的燃油效能。
3 结束语
通过对电机的各种特点和特性进行比较,可知HEV驱动电机必须将永续同步电机作为选择。通过介绍PMSM,为发动机控制提供了非常可靠的理论基础。
滞环比较器作为传统的转矩控制系统的误差调节,当出现误差较大或者较小时,滞环比较器只能够选择同一电压矢量,这样会导致系统转矩响应速度慢,从而导致转矩脉动增加。仿真结果表明,相对于传统转矩控制,蚁群算法更加适用于直接转矩控制。
本文虽然通过仿真设计验证了模糊神经网络的有效性,但由于科学的发展以及在时间和设备上的限制,在今后的研究中应该更进一步完善硬件设计,尽可能随着科学技术的发展,使得设计更加完善。