线阵LED 显示装置的多学科交叉融合设计研究
2023-11-13原晓楠李瑞程高心如朱颜泽
原晓楠,李瑞程,高心如,朱颜泽
(西安交通大学 电气工程学院,西安 710049)
随着科学实验技术的不断发展和各类学科知识的交叉融合,对于各类装置的设计研究不再停留在采用单一学科分析与解决的方法,基于电工电子技术、无线供电技术、机械设计技术、3D 打印技术等多学科交叉融合的背景,论文进行了以线阵LED 显示装置为主体的设计研究。LED 显示技术因其功耗小、亮度高、抗干扰性能强的优点已经盛行多年,具有广泛的市场应用[1-2]。线阵LED 显示装置主要是利用人眼视觉暂留现象原理,通过将需要显示的图文进行点阵处理,使得线阵LED 迅速旋转点亮相应位置,从而完成图形文字的显示。为了保证装置的稳定性和供电方式的有效性[3-4],利用机械设计技术进行了装置结构的设计并采用3D 打印技术进行了线阵LED 显示装置的制作。
1 设计原理
1.1 设计思路
线阵LED 显示装置要求由多只LED 构成线状点阵,选择合适的主控芯片完成LED 的控制及红外遥控功能,设计可安装LED 线状点阵的旋转平台并利用电动机带动平台旋转实现图形显示,基于系统要求规划设计思路如图1 所示。
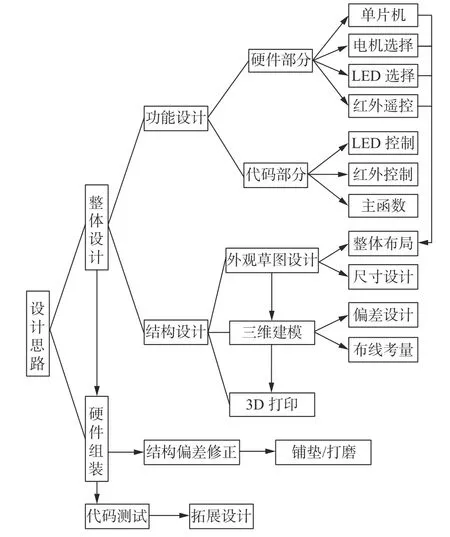
图1 系统设计思路
1.2 方案选择
1.2.1 电机选择
系统对电机具有平稳、高转速、环保、节能且无需实现转向功能的要求,通过对比表1 中不同电机的性能,最终选择型号为25GA370 直流减速电机。电机正常工作电压为6 V,转速为620 r/min,满足视觉暂留现象原理以形成完整图案,同时拥有较大的扭矩,体积较小,成本较低,对于精炼装置有很大的帮助。
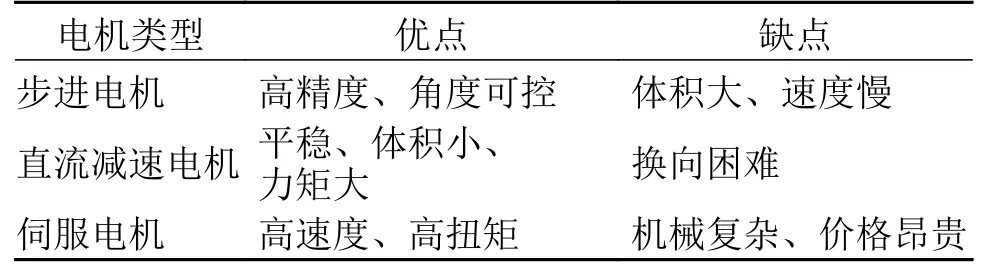
表1 电机性能比较
1.2.2 供电方案选择
系统涉及电机、LED 与单片机的供电,电机处于装置底部,可采用直流电源模块供电,LED与单片机处于装置顶部旋转部分,采用一般的有线供电方式容易造成导线缠绕,因此考虑采用电磁感应原理,通过线圈进行能量耦合实现能量传递的无线供电[5-6],针对其距离问题,融合机械结构设计技术为线圈设置凸台,从而减少两线圈之间的距离,达到最好的供电效果。
1.2.3 单片机选择
由于系统旋转部分体积的限制,要求控制模块占用空间尽可能小,因此选用高集成度、体积小、高可靠性的STC89C52 芯片,它具有优良的I/O 口逻辑操作位处理能力,完全满足LED 控制和红外控制的要求,只需基于STC89C52 芯片搭建最小系统即可完成系统控制功能。
1.2.4 LED 选择
使用型号为WS2812 的集成化智能外控LED灯带,其最大优势在于其通信方式为单总线通讯,只需要使用一个I/O 口控制,并且由于灯珠内置驱动电路,有一个数据输入口和一个数据输出口,可以将接收到的数据再次发送给下一个灯珠,大大避免了走线问题。灯珠对应的每个像素点的三基色可实现256 级亮度显示,完成16 777 216种全真色彩显示[7],保证了显示颜色与闪烁模式的多样性。
1.3 系统设计
系统主要由主控单片机、红外遥控模块、LED模块、电机模块与供电模块组成,其中供电模块包括为电机供电的电源模块与为旋转部分供电的无线供电模块。单片机主控板置于旋转臂一侧的电控盒中,对整个系统进行控制,同时可接收红外遥控模块的指令,对LED 模式进行调整,改变图形显示状态,当底部电源接通时电机工作,实现图像显示。
2 硬件设计
2.1 主控模块
系统的主控模块为STC89C52 单片机最小系统,搭载在旋转臂一侧的电器盒中,包括STC89C52芯片、阻容复位电路以及晶振电路[8],如图2 所示。搭建好的主控模块体积很小,满足旋转部分的要求。
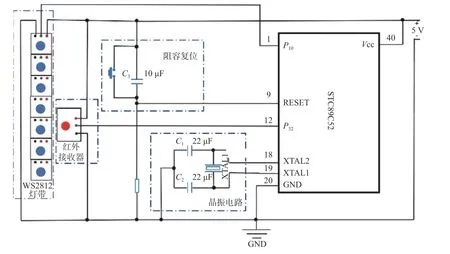
图2 主控模块电路原理
2.2 红外通信模块
系统通过红外通信方式实现LED 的显示模式切换[9]。遥控器发出38 kHz 的间断脉冲,红外接收模块接收到信号并进行放大,检波整形得到TTL 编码信号[10],实现信号地解码后交由单片机处理,从而对LED 显示模式进行控制。红外通信模块电路原理如图3 所示。

图3 红外通信模块电路原理
2.3 供电模块
供电模块由电源模块与无线供电模块两部分组成,如图4 所示。电源模块位于固定底座,用来给电机供电;无线供电模块通过无线传输方式将固定部分的电源传输至旋转部分完成供电,无线供电模块输入电压为12 V,在最佳距离3~6 mm时可在接收端输出5 V 电压[11],以供给电器盒内的电路。

图4 电源模块电路原理
2.4 电机模块
系统的显示原理基于人眼视觉暂留现象原理,即光对视网膜所产生的视觉在光停止作用后,仍保留一段时间的现象而设计,现有科学研究表明,人眼视觉暂留的维持时间为0.1~0.4 s[12-13]。为保证完整图像显示,旋转臂需要在0.3 s 内完成一圈的转动,即旋转臂转速需达到200 r/min。由于系统的旋转臂与电机输出轴之间采取直接连接的方式,所以电机所需的最小转速为200 r/min。25GA370 直流减速电机空载转速为620 r/min,负载转速为500 r/min,接入直流电源即可满足视觉暂留要求,形成稳定的图像显示效果。
3 软件设计
3.1 程序设计
系统整体程序设计流程如图5 所示,首先初始化各模块,之后调用红外接收解码函数接收遥控信号,根据遥控信号调用对应的模式函数对灯带模式进行设置并完成数据传输,实现图像显示。

图5 系统整体程序设计流程
3.2 模式设置
系统设定了6 种模式,可以分别实现不同的动态图像,模式设置功能如表2 所示。将灯珠RGB 的值放入数组WS2812_Buffer[i][j](0≤j≤2),其中第一维度i对应灯珠序号,第二维度j对应R、G、B。以由内向外的同心圆图图像显示为例,在第i次循环中根据需要显示的颜色改变数组WS2812_Buffer[i][j]的值,并将数组中其余元素全部设置为0,数据传输至灯带后延时0.5 s 以满足人眼视觉暂留现象原理,亮起的灯珠将形成一组同心圆,并以0.5 s 为间隔不断向外扩大。其他模式的设计原理相同,但需要在此基础上对WS2812_Buffer 数组的值、延时时间进行调节[14]。
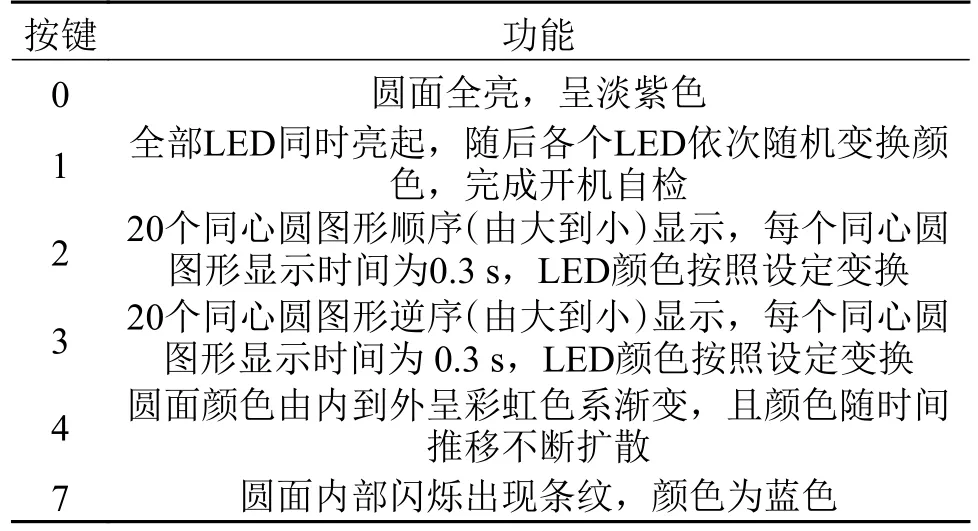
表2 模式设置功能表
4 机械设计
系统整体采用分离式设计,即底座与旋转部分配合安装。底座部分包括上底盘、电机套筒、开关盒等,旋转部分包括装有灯带的转动臂及放置单片机控制系统的芯片盒,具体机械结构如图6 所示。

图6 系统机械结构
系统巧妙采用机械结构设计解决系统平衡问题及后期维修更换问题,在电器盒底部设置中空结构放置配重铁片,用于平衡电气盒与转动臂产生的力,配套设计可推拉盖板,电器盒与转动发光臂也采取分离设计,二者通过固定销连接,方便零部件的替换与检查[15]。转动发光臂上设计凹槽以固定灯带防止甩动,连接部分巧妙采取半圆契合方式以达到传递转矩的效果,为保持稳定,连接部分与电机同轴,并在单臂另一侧配重以达到力平衡,整个旋转部分都采用抽壳方式减轻重量,节约用料,最终完成的系统实物如图7所示。

图7 系统实物
5 拓展设计
通过进一步拓展算法配合设计电机转速反馈电路可以实现高级图像显示,如图8 所示。设连续接收到两次脉冲信号的时间间隔为ΔT,转动部分的旋转角速度为ωn,以转动中心为极点,规定一条极轴,以逆时针为正方向建立极坐标系,可以得到任意时刻下,转轴所处的极坐标位置θ:
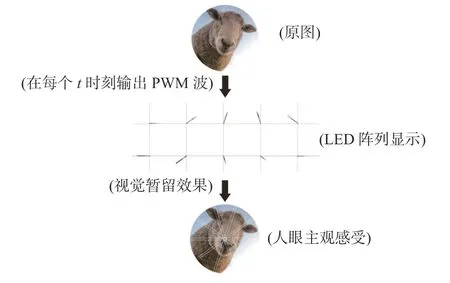
图8 静态图片显示原理
当第一颗灯珠中心与极坐标系极点重合,相邻灯珠距离为δ,可以通过极径ρ表示出每一颗灯珠在位置θ下所处的线性位置:
第n个灯珠在t时刻所处的空间位置坐标为:
基于WS2812 灯带,可以通过输入特定的PWM波对第n个灯珠的RGB 进行控制,将这种控制关系描述为:
根据这一对应关系,可以推导出LED 高级图像显示模式下,图片或文字信息的表示方法:
6 结束语
论文以线阵LED 显示装置的设计与研究为主体,从项目整体分析、元件选型、电路设计、软件编程、机械设计等多角度进行装置的探索与实验,在研究过程中有效交叉融合电工电子技术、无线供电技术等电类知识与机械设计技术、3D 打印技术于一体,进行装置性能的实现与提高,通过多次实验调试形成了稳定、清晰、节能、多样的线阵LED 显示装置。系统研究过程中多学科知识有机结合解决复杂问题的方法充分验证了多学科交叉融合在实验研究中的重要作用,为后续的科学研究工作提供了有效的经验。
