矿井提升机健康状态评估与预测系统研究
2023-11-10王琛杨岸
王琛, 杨岸
(安徽理工大学 电气与信息工程学院,安徽 淮南 232000)
0 引言
矿井提升机作为连接井上、井下的关键运输设备,其正常工作与否,直接关系到煤矿的生产效率和人员安全。目前,大部分煤矿企业采用无线传感网络对矿井提升机重要部位进行监测或定期人工巡检,忽略了指标数据的衰退对矿井提升机健康状态的影响及各指标之间的联系,只能得到正常和故障2种状态,且增加了停机次数,降低了生产效率。随着物联网技术的不断成熟,许多学者将物联网技术应用到提升机故障诊断中,显著提高了故障诊断的实时性和准确率[1-3]。但是,提升机故障诊断结果只能显示提升机是否故障。而对提升机进行健康状态评估,面向的是整个提升机系统,得到的结果更精细,更能准确反映当前提升机状态。因此,为了保证整个提升系统安全可靠运行,有必要对矿井提升机健康状态进行评估。
矿井提升机工况复杂,随着运行时间增加,其总体健康状态呈逐渐退化趋势,对矿井提升机进行健康状态评估是从完好状态到一系列不同退化状态的定量评估。健康状态评估作为故障预测与健康管理的关键,主要采用模型法和数据驱动法来实现[4-6]。模型法根据设备退化的物理规律,依靠相关领域的专家经验知识,设计微分或差分方程模型量化设备退化的本质,实现设备健康状态评估。数据驱动法利用机器学习、统计学方法挖掘指标监测数据间的关系,实现设备健康状态评估,如深度置信网络[7]、贝叶斯网络[8]、层次分析法(Analytic Hierarchy Process,AHP)[9]、灰色理论[10]和模糊综合评估等[11]。单一的数据驱动方法无法充分挖掘各系统数据之间的联系,得到的结果具有一定的偶然性,设备健康状态评估的准确率不高。而模糊综合评估法是将2种或2种以上的方法融合,形成优势互补,为设备健康等级评估提供了可靠依据。如文献[12]对矿井提升机的制动系统进行分析,运用模糊综合评估法对制动系统的健康状态进行了评价。
健康预测是指基于健康状态评估历史数据,利用神经网络[13]和回归模型[14]等技术,预测设备未来性能变化趋势。通过健康预测,可为制定设备维修策略和预警提供依据,实现机电设备智能化维修的目标。近年来,神经网络在数据预测领域的优势得到了证明[15-17],然而,预测结果的准确性受到样本数量和网络性能的限制。支持向量回归(Support Vector Regression,SVR)是一种基于支持向量机(Support Vector Machine, SVM)实现的回归模型。与SVM的不同之处在于,SVR最终只有一类样本点,它所寻求的最优超平面并不是SVM中2类或2类以上样本点的“最宽”分离,而是所有样本点与超平面的总偏差最小。因此,SVR更适合解决小样本数据的预测问题[18-20]。但是SVR模型惩罚因子和核函数参数的选取比较困难,模型泛化能力较差,需要采用元启发式算法-哈里斯鹰优化(Harris Hawks Optimization,HHO)算法进行优化,HHO算法模仿哈里斯鹰的狩猎行为,具有更强的寻优能力,可以有效弥补传统算法在搜索优化[21]时的不足。
目前,对矿井提升机整个系统进行健康状态评估与预测的相关研究相对较少。针对该问题,本文设计了矿井提升机健康状态评估与预测系统。针对提升机各组成系统的监测数据无法充分利用、健康状态评估结果不能满足实际生产需求的问题,提出了一种提升机健康状态模糊综合评估方法,通过计算提升机各组成系统和指标的综合权重,并与其模糊评判矩阵进行运算,得到健康状态评估结果。在提升机健康状态评估结果基础上,构建HHO-SVR健康预测模型,利用HHO算法优化SVR的重要参数,提高健康预测结果的准确性。
1 矿井提升机健康状态评估与预测系统结构
矿井提升机健康状态评估与预测系统由感知层、传输层和应用层组成,如图1所示。
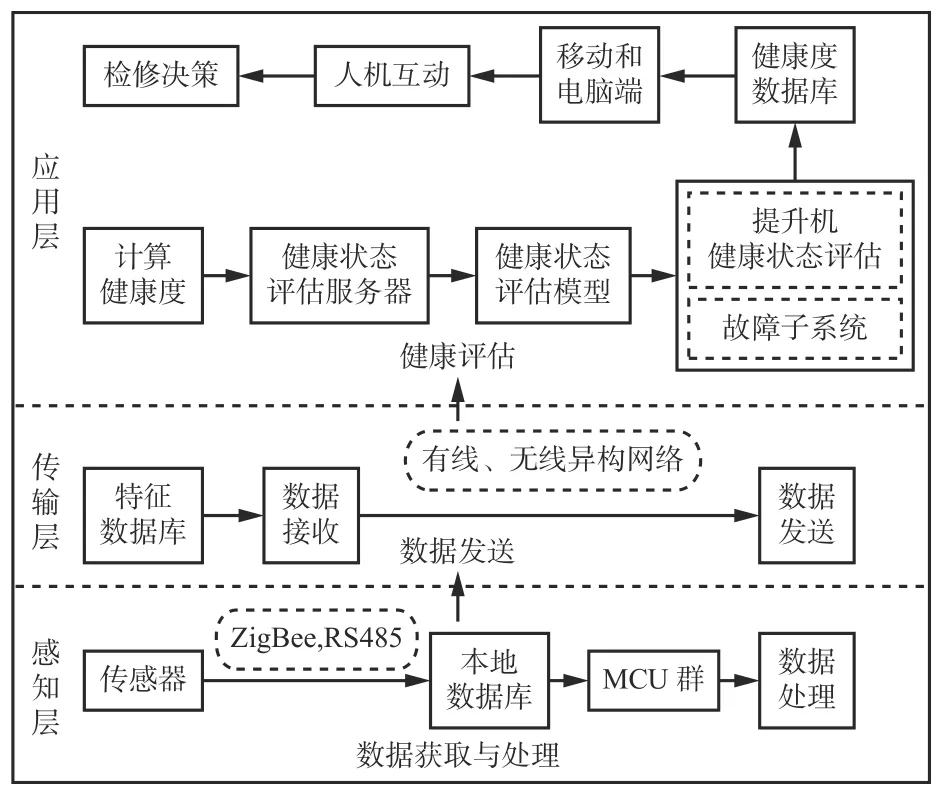
图1 矿井提升机健康状态评估与预测系统结构Fig. 1 Structure of the health evaluation and prediction system for mine hoists
感知层进行指标数据采集与处理。传感器采集的指标数据通过ZigBee、RS485通信网络汇集到本地数据库,利用高性能微处理器嵌入的相关算法对数据直接进行边缘处理,并进行特征提取。
传输层将感知层中的指标数据特征通过异构网络传输至应用层中的数据接收终端,并保存至特征数据库中。
应用层进行提升机健康状态评估与预测。求取指标数据的健康度并输入到健康状态评估服务器中,运用健康状态评估模型得到矿井提升机的健康度,并保存到健康度数据库中。基于历史健康度数据,利用预测模型对提升机健康状态进行预测。服务器可以更新健康状态评估与预测模型,以确保提升机在不同退化阶段的健康状态评估与预测结果的准确性。
2 健康状态评估指标体系
2.1 指标体系构建
矿井提升机主要包括驱动电动机、传动轴承、提升钢丝绳、制动装置、润滑装置、装卸设备及附件。根据工作性质可将提升机大致分为驱动电动机系统、轴承系统、液压系统、钢丝绳系统和制动系统。驱动电动机与轴承系统直接相连,带动滚筒旋转,滚筒上缠绕着钢丝绳,从而带动罐笼在井筒中做周期性循环往复动作。液压系统降低了各机械部件在长期高负荷运转下的磨损。制动系统能够保证提升机在高速、高负载工况下有效制动。
为了建立矿井提升机健康状态评估指标体系,针对提升机在运行过程中存在的问题,经过实地考察其工作状况,统计提升机检修日志,并结合相关标准和要求,对影响提升机健康状态的常见故障部位进行归纳与总结。结果表明,故障主要集中在拖动、制动、滑动控制和钢丝绳部分。影响提升机健康运行的主要故障位置及其发生的可能原因见表1。
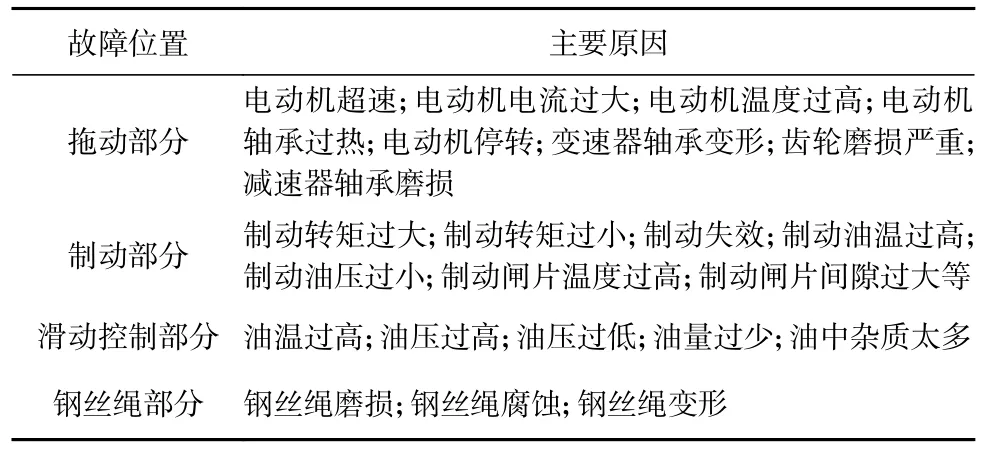
表1 提升机主要故障位置及其原因Table 1 Main fault positions and causes of hoists
提升机各子系统相互协调,不同故障具有层次性和相关性,各子系统的健康状态由监测的指标数据反映,各子系统的健康状态又直接决定了提升机的健康状态。矿井提升机健康状态评估指标体系分为目标层、子系统层和指标层,如图2所示。通过监测指标数据,计算子系统的健康状态,再结合所有子系统的健康状态,最终得到矿井提升机的健康状态。
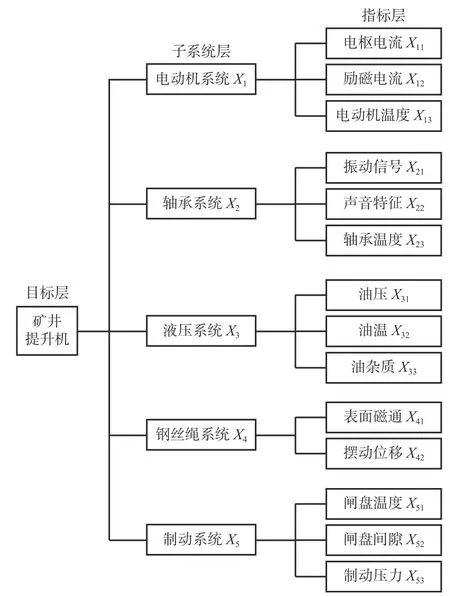
图2 矿井提升机健康状态评估指标体系Fig. 2 Index system for health evaluation of mine hoists
依据《煤矿安全规程》、《煤矿矿井机电设备完好标准》、专家意见和运维经验,将矿井提升机的健康状态分为健康、亚健康、警告和故障4个等级,矿井提升机健康状态描述和检修决策见表2。
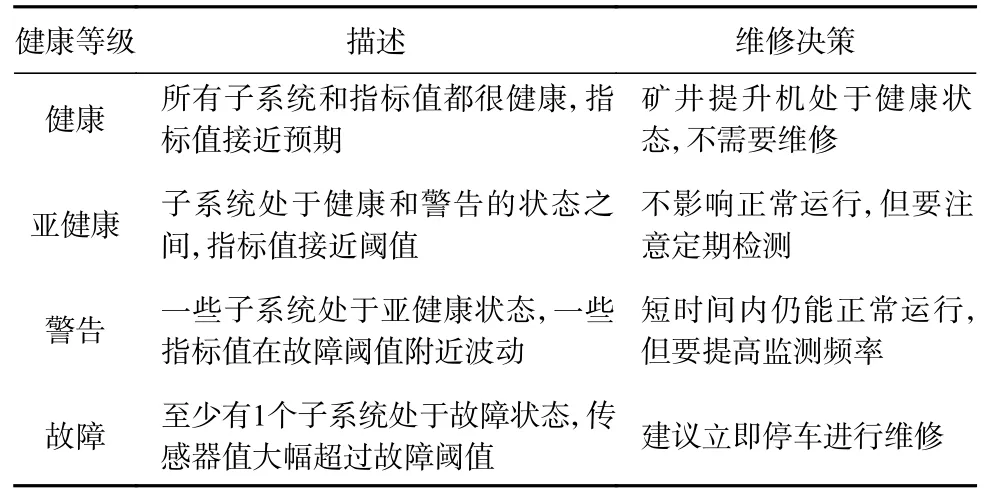
表2 矿井提升机健康状态描述和检修决策Table 2 Health status description and maintenance decision of mine hoists
2.2 健康度计算
指标数据具有不同的物理意义和变化范围。为了便于进行综合分析,消除不同指标数据类型、数量级和量纲的影响,使得各参数之间具有可比性,需要对指标层中的数据进行归一化处理。此外,矿井提升机在高负荷连续运行时,其健康状态有一个逐渐退化的过程,一旦指标参数超出允许的阈值范围,提升机将表现为故障状态。因此,本文引入相对劣化度[22]表征提升机的健康度,即提升机的子系统或部件偏离健康状态向故障状态发展的程度,其取值范围为[0,1]。矿井提升机健康等级与健康度之间的关系见表3。
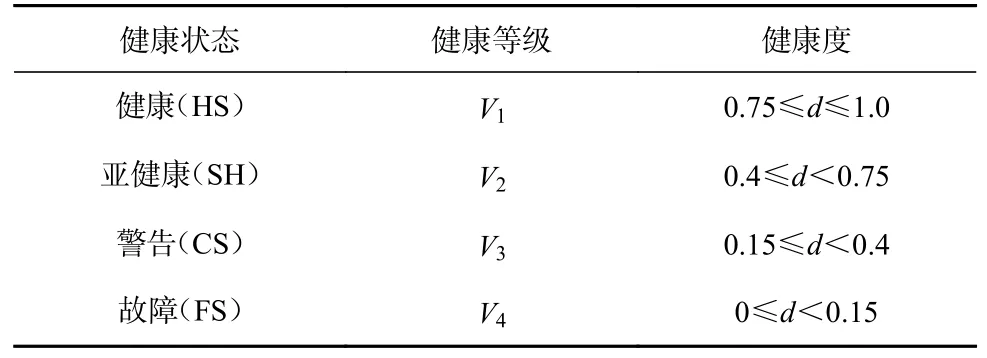
表3 矿井提升机健康等级与健康度之间的关系Table 3 The relationship between the health level and health degree of mine hoists
根据指标变化对提升机健康状态的影响,将指标分为效益型、成本型和区间型。效益型指标的健康度da越大,表明设备的健康状态越好;成本型指标的健康度db越小,表明设备的健康状态越好;区间型指标的健康度dc在一定范围内时,设备的健康状态最佳。不同类型指标的健康度归一化公式为
式中:x0为指标正常值;xk为实际监测的第k个指标值;xmin为效益型指标的故障阈值;xmax为成本型指标的故障阈值;x02,x03分别为指标正常值的下限和上限,x01,x04为提升机故障时的指标阈值。
3 矿井提升机健康状态评估方法
3.1 模糊综合评估模型
矿井提升机组成系统复杂,其健康状态具有模糊性,传统的精确评估算法难以有效评估,需利用模糊综合评判模型对提升机健康状态进行评估,得到一个具体的评估结果。其基本思想是根据提升机健康状态评估指标体系,用模糊隶属函数对各指标的健康度进行处理,得到隶属度向量,再利用综合权重分析法确定权重分配,实现从指标层到目标层隶属度向量的合成运算,最终得到系统的评估结果。本文采用基于相对劣化度的模糊综合评估方法建立提升机健康状态评估模型,建模步骤如下。
1) 确定提升机的子系统集和评估指标集:
式中:X为提升机系统;Xi为第i个子系统,i=1,2,…,s,s为子系统个数;Xij为子系统Xi第j个评估指标,j=1,2,…,Ki,Ki为Xi中的评估指标个数。
2) 确定健康状态评语集:
3) 计算子系统Xi的健康度:
式中dij为子系统Xi第j个评估指标的健康度。
4) 根据模糊隶属函数确定dij与健康等级之间的模糊评估矩阵:
式中rVl(dij)为评估指标的健康度dij隶属于健康等级Vl的概率,l=1,2,3,4。
所有子系统的模糊评估矩阵为
5) 确定子系统集和指标集的权重:
式中:W为子系统集权重;Wi为子系统Xi的权重;Wij为子系统Xi第j个评估指标的权重。
6) 通过模糊矩阵复合运算,计算子系统Xi的健康状态评估矩阵:
式中:◦为模糊合成算子,选取加权平均型M(*,+)模糊合成算子;bi(V1)—bi(V4)为子系统Xi隶属于不同健康等级的概率。
子系统Xi隶属于健康等级Vl的概率为
7) 通过模糊矩阵复合运算,计算矿井提升机的健康状态评估矩阵:
式中b(V1)—b(V4)为提升机隶属于不同健康等级的概率。
8) 确定提升机的健康度。得到提升机健康等级隶属度后,通常有2种方法来确定提升机具体的健康状态:一是依据最大隶属度原则确定,即健康状态评估结果与隶属度最大的健康等级一致;二是综合考虑各指标间的关系确定。最大隶属度原则忽略了其他元素对健康状态评估的影响,得到的结果较片面。因此本文采用第2种方法。规定健康状态的加权值为0.875,亚健康状态的加权值为0.575,警告状态的加权值为0.275,故障状态的加权值为0.075,则提升机最终健康度为
9) 确定故障子系统和异常指标。当提升机处于警告或故障状态时,为了便于检修,需要确定导致提升机处于该状态的子系统和指标,本文采用最大隶属度原则确定故障子系统和异常指标。
矿井提升机健康状态评估流程如图3所示。
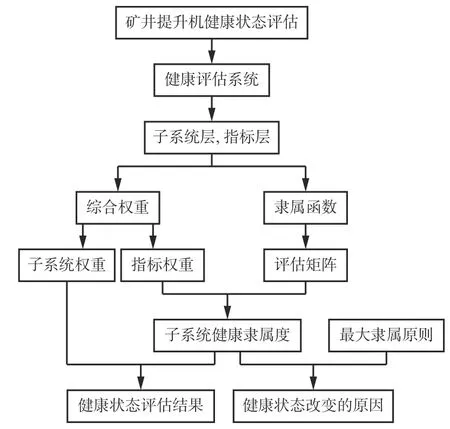
图3 矿井提升机健康状态评估流程Fig. 3 Process of health evaluation of mine hoists
3.2 模糊隶属函数确定
每一个指标的健康度所对应的健康等级隶属度可以用1组隶属函数公式来定量描述。隶属函数的确定一般有3种方法:模糊统计法、神经网络、指定法。模糊统计法适用于指标不能进行定量分析的情况,神经网络适用于指标数据和健康等级关系确定的情况。本文使用指定法,即指定隶属函数。典型的隶属函数形式包括梯形、三角形、矩阵及k次抛物线型分布等[23-24]。隶属函数的选择从根本上要求具有客观性,但是也允许主观因素的存在,因为要保证隶属函数的合理性,重点是能够体现出因素隶属集的演变历程。
通过统计分析矿井提升机历史故障可知,提升机处于健康和亚健康状态的置信度较高,而警告和故障状态一般能够及时发现。相邻2级健康状态之间的准确判断是隶属函数确定的关键。此外,各指标健康度与健康等级对应的某区段的隶属程度随着指标数据的变化呈线性变化。考虑到三角形隶属函数不能细致处理状态等级边缘信息,梯形隶属函数不能很好地保存隶属度边界信息,本文采用适应性更强的半梯形和三角形相结合的分布函数建立指标隶属函数。其中,故障和健康状态采用半梯形分布,警告和亚健康状态采用三角形分布。
健康度是提升机健康状态的标准化体现,可以从提升机健康度入手,统一划分评语集中健康等级的隶属区间,进而使隶属函数标准化。
半梯形隶属函数f1(x)和三角形隶属函数f2(x)分别满足以下条件:
式中c1-c4为待定系数。
将健康度与健康等级之间的关系代入式(14)、式(15)中,得
健康度与健康等级的隶属函数如图4所示。

图4 健康度与健康等级的隶属函数Fig. 4 Membership function of health degree and health level
3.3 综合权重向量计算
合理确定各指标的权重是获得可靠评估结果的关键。权重确定方法很多,包括主观赋权法、客观赋权法和主客观赋权法。主观赋权法依靠专家经验,存在较强的主观性;客观赋权法利用数据自身的客观属性进行科学评价,降低了主观赋权法的影响。采用主客观赋权法求取指标层和子系统层的主客观权重,最终得到合理的综合权重。
3.3.1 主观权重
AHP可以有效地对提升机状态量进行分类管理,建立提升机健康状态评估层次结构。AHP使用1—9标度得到判断矩阵,通常因为判断矩阵不能通过一致性检验而无法决策。指数标度以心理学定律为基础,使判断思维与客观判断有近似的一致性,与其他互反型标度相比具有较高的计算精度、一致性和权重拟合性,更适用于多准则下的排序问题[25]。因此,本文采用指数标度替代1—9标度,对AHP进行改进。1—9标度与指数标度的关系见表4。
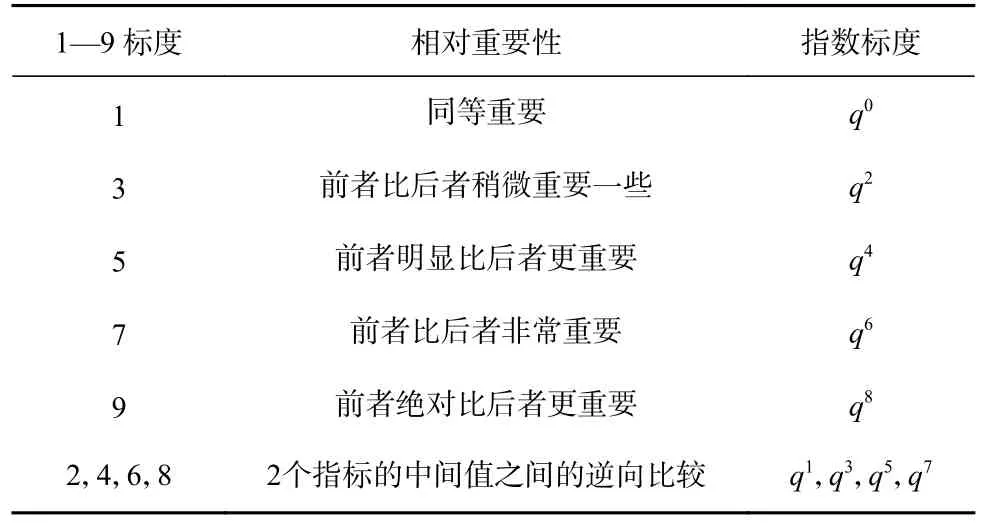
表4 1—9标度与指数标度的关系Table 4 The relationship between 1-9 scale and exponential scale
专家经验对指标重要级别间的区分能力有限,级数较多时容易产生混淆与模糊不清,级别较少时得到的结果不准确。本文采用的指数标度选择3级标度。使用指数标度构建判断矩阵时,相邻重要度之比q的取值直接影响权重确定的结果,其值为[1.1,1.5]时符合专家实际判断,得出的判断矩阵与实际物理量的相对重要性近似一致[26]。为了得到q值,以轴承系统中的声音特征与振动信号重要级别权重之比(权重之和为100)为例,对专家进行问卷调查,并对调查结果取平均值。
式中:N为专家数;Yy为第y个专家给出的声音特征与振动信号重要级别权重之比。
经过计算得到q值为1.3。
对于n个子系统或指标a1,a2,…,an,将相邻子系统或指标的重要程度量化为tg(g=1,2,…,n-1)。由于指数标度是互反型标度,所以判断矩阵下三角部分为上三角部分的倒数,其他非相邻子系统或指标的重要程度由其之间的重要程度的传递性得出,判断矩阵为
判断矩阵A中的元素满足以下条件:对角线元素agg=1;agh=1/ahg,h=1,2,…,n;agh=agu/ahu,u=1,2,…,n,agh为第g个子系统或指标相对于第h个子系统或指标的标度值。判断矩阵A具有完全的一致性,因此改进AHP不需要校验判断矩阵的一致性,可直接用于权重计算。
改进后的AHP计算步骤如下:
1) 对子系统层和指标层的元素进行两两比较,得到判断矩阵Agh=(agh)n×n。
2) 计算判断矩阵的特征向量,并进行归一化。
式中:w'g为归一化特征向量,即评判状态量的主观权重;Gg为判断矩阵Agh中每一行元素的乘积。
3.3.2 客观权重
CRITIC法是一种客观赋权法,通过分析不同状态量之间的相关性,计算出相同指标在不同方案下的对比强度,并利用相关系数来量化指标之间的冲突性,得到子系统层和指标层因素的客观权重[27]。假设在相同的时间间隔内采集m次矿井提升机z个状态量的数据,得到原始状态量数据矩阵:
根据指标健康度,使用标准差衡量各指标不同取值的差异,标准差越大,表明该指标值差异越大,可以反映更多信息,指标权重也越大。冲突性指的是在同一子系统下不同指标之间的相关性大小,相关性越强,表明指标之间的冲突性越小,应减小对该状态量的权重分配。相关计算公式为
式中:Se,Sv分别为第e,v个状态量方差;为P预处理后的元素;为P预处理后的第e行元素均值;ρev为2个状态量的相关系数;D(·)为协方差函数;P'e,P'v分别为P预处理后的第e,v行元素;Ze为第e个状态量的信息量;为客观权重。
3.3.3 综合权重的确定
改进AHP得到的权重依然存在主观性,忽略了指标数据的统计关系,而CRITIC法得到的客观权重完全依赖于指标数据的统计关系,忽略了指标之间的联系。因此,构建权重组合模型函数,重新分配主客观权重,得到综合权重wi。权重组合模型函数为
式中μ为主客观权重比,0≤µ≤1。
根据拉格朗日乘数法,式(30)在可行域存在唯一解:
运用优化权重组合理论[28],将提升机的综合状态量与单项状态量的主客观权重按照比例进行优化,解得µ=0.4。
4 矿井提升机健康状态预测方法
SVR通过引入核函数和损失函数将数据映射到高维空间,并找到最佳拟合超平面,使所有训练样本与该超平面的总偏差最小化,从而解决了小样本非线性回归问题。为了提高SVR模型[29]的非线性处理能力,通常选用高斯径向基函数(Radial Basis Function,RBF)作为核函数。在实际应用中,SVR模型的非线性回归效果受到惩罚因子C和径向基核函数参数γ的影响。为了提高SVR对数据预测的准确性,需要对参数C和γ进行优化。本文利用HHO算法在SVR中寻找C和γ的最优值。
HHO算法基于哈里斯鹰的群体取食习惯,揭示了多种追逐模式,通过判断猎物的位置和能量|I|采取不同的捕食方法[30],具有寻优能力强、结构灵活、调整参数少等特点。
HHO-SVR模型建立步骤如下:
1) 将提升机健康度数据按一定比例分为训练集和测试集。
2) 初始化SVR模型,通过训练集完成模型拟合,得到相应的适应度。
3) HHO算法通过更新搜索方法和路径完成种群迭代,并保留优势个体。
4) 迭代到终止条件后,将最优解对应的C和γ作为SVR的参数,得到最终模型。
HHO-SVR模型建立流程如图5所示。

图5 HHO-SVR模型建立流程Fig. 5 The process of Harris hawks optimization- support vector regression model
与常用的经典算法如粒子群优化(Particle Swarm Optimization, PSO)、遗传算法(Genetic Algorithm,GA)、灰狼优化(Grey Wolf Optimizer,GWO)相比,HHO算法通过Lévy飞行确定搜索步长,可以有效避免陷入局部最优解。在SVR模型中,采用均方误差(Mean Squared Error,MSE)作为待优化参数的适应度函数。
式中:E为MSE值;Fα和分别为第α个数据的实际值和估计值;M为数据数量。
MSE值越小,估计值越接近真实值,模型的性能越好。
5 实例验证
5.1 实验平台
采用某矿业集团TDBS-5300-20型主井提升机进行实验,实验平台主要参数见表5。为了获取提升机的实时运行状态信息,安装了相关传感器。现场照片如图6所示。
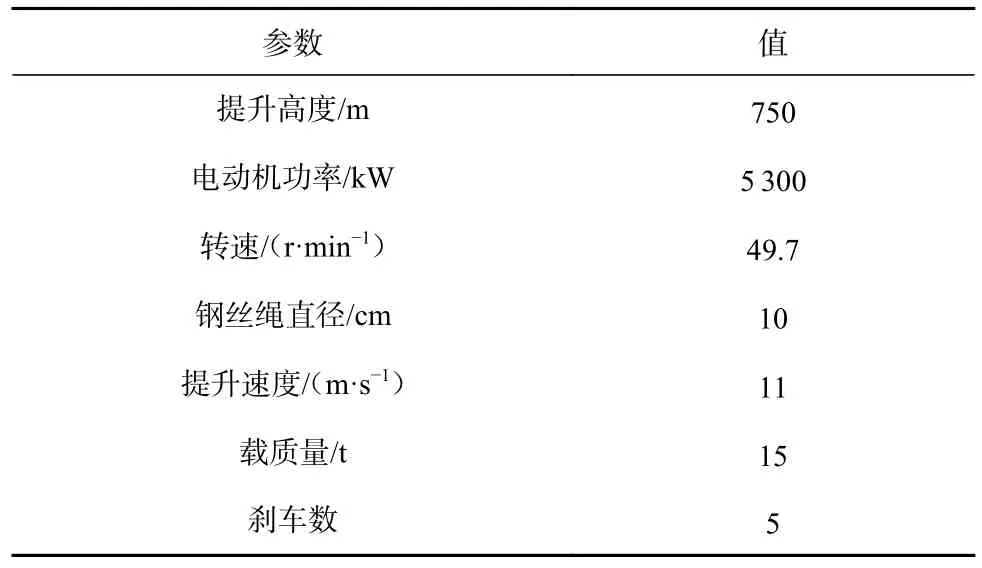
表5 实验平台主要参数Table 5 Main parameters of the experimental platform

图6 实验现场Fig. 6 Experimental site
矿井提升机的1个运行周期包括加速、匀速和减速阶段,在提升机的不同运行阶段,各指标值变化率不同,部分指标数据在1个周期内变化率较小。不同指标在不同运行阶段的数值见表6。
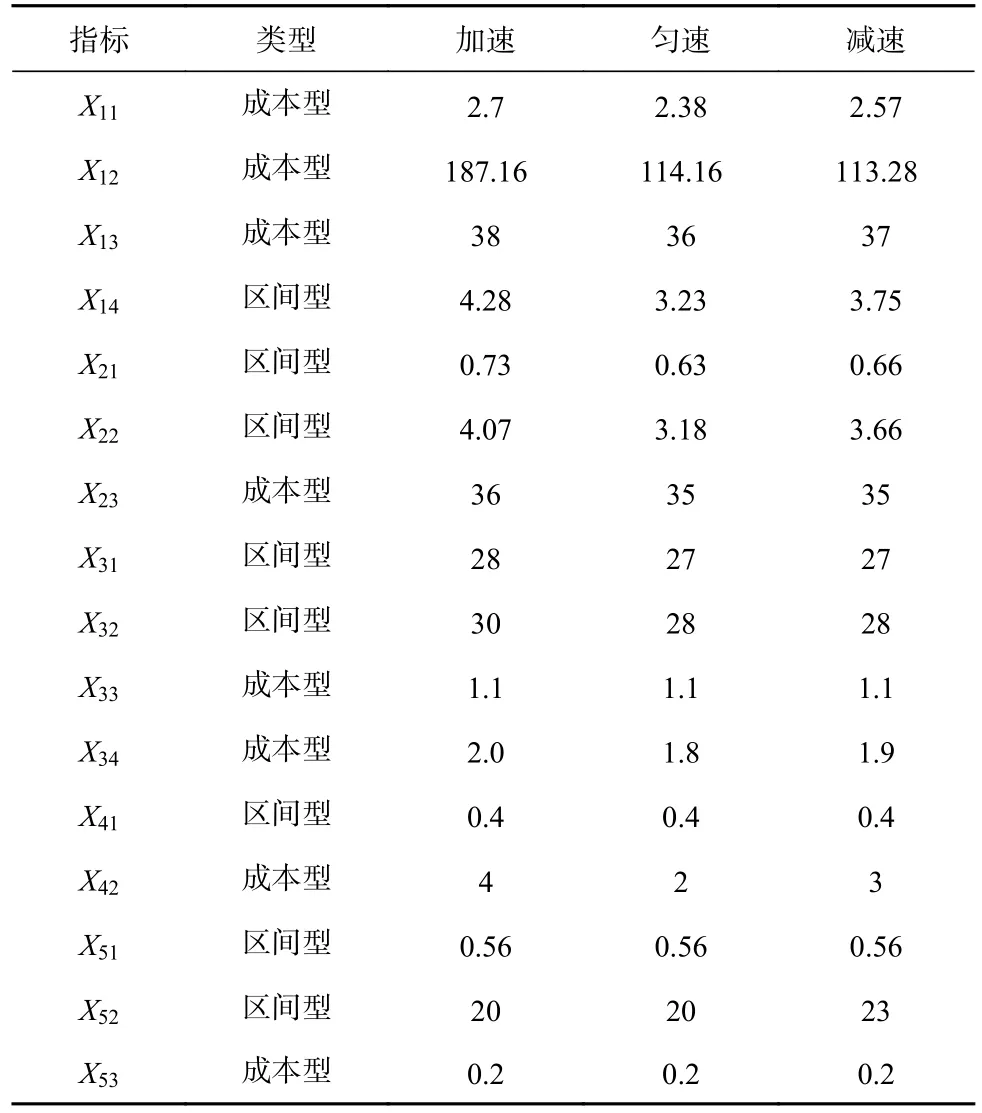
表6 不同指标在不同运行阶段的数值Table 6 Values of different indicators at different operating stages
5.2 子系统层健康状态评估结果
由于各子系统对应指标集的健康状态计算过程相同,为便于叙述,现以驱动电动机系统的指标集为例说明子系统的健康状态计算过程。
1) 根据各指标的数据类型和正常取值范围,利用式(1)-式(3)计算各指标的实时健康度
2) 根据模糊隶属函数和式(16)—式(19)获得指标的模糊评估矩阵:
3) 确定各指标的综合权重。结合式(22)—式(24),使用改进AHP获得指标的主观权重并进行归一化,得;结合式(25)—式(29),使用CRITIC法获得各指标的客观权重,得根据式(30)获得各指标的综合权重,得w1=[0.29820.3055 0.17020.2261]。
4) 计算子系统的健康状态评估矩阵:
计算所有指标的健康度:[d21d22d23]=[0.72 0.71 0.73];[d31d32d33d34]=[0.68 0.65 0.51 0.63];[d41d42]=[0.84 0.87];[d51d52d53]=[0.47 0.42 0.31]。
所有指标的模糊评估矩阵如下:
所有指标和子系统的综合权重见表7。
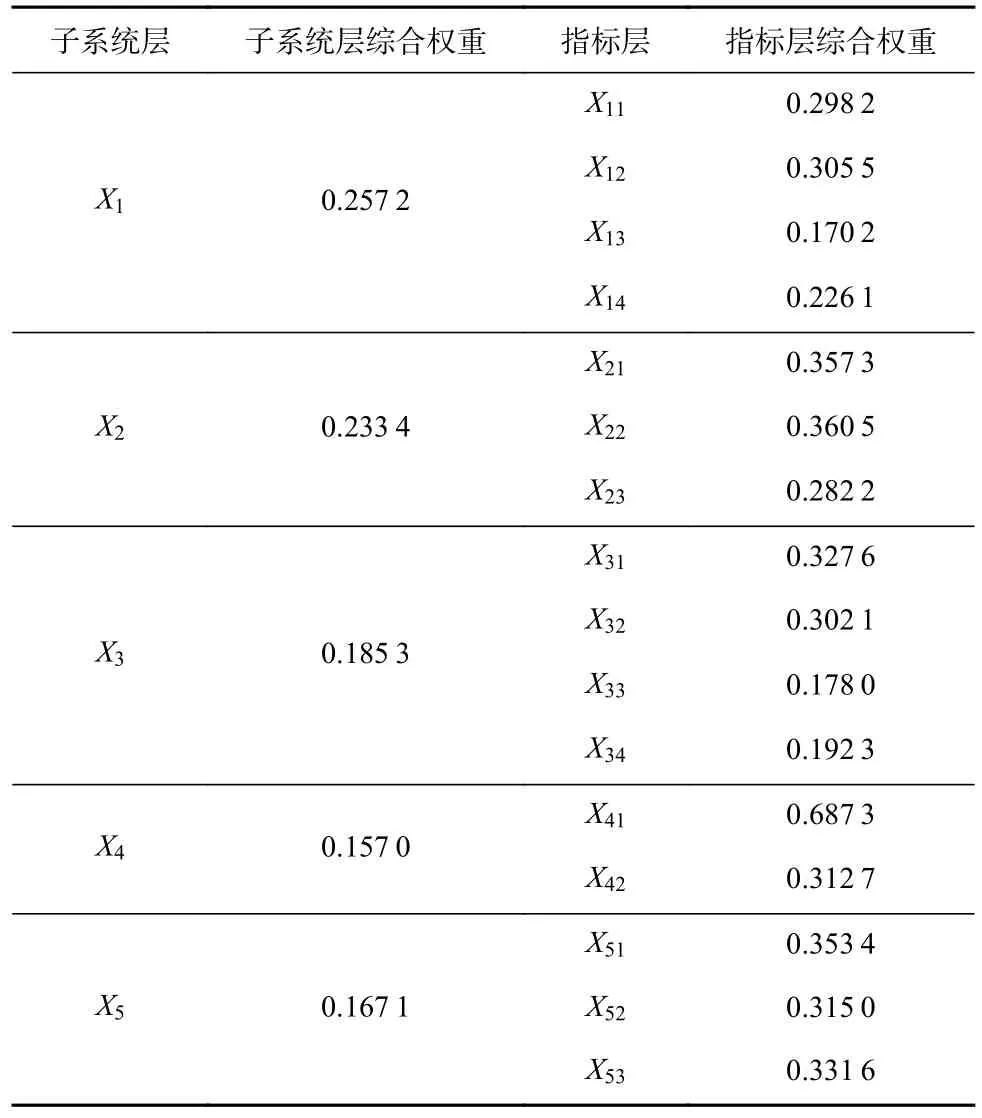
表7 指标层和子系统层的综合权重Table 7 Comprehensive weights of indicator layer and subsystem layer
由综合权重和模糊评判矩阵求得各子系统的模糊评估矩阵:B1=[00.91200.08800];B2=[00.9120 0.08800];B3=[00.66020.33980];B4=[0.3962 0.603800];B5=[00.07970.80090.1194]。
5.3 矿井提升机健康状态评估结果
根据式(12)求得矿井提升机的健康状态评估矩阵:
由式(13)求得矿井提升机的健康度为
查看表3可得,此时的提升机处于亚健康状态。根据最大隶属度原则,在组成子系统中,制动系统处于警告状态,通过追溯指标值可知,制动系统的闸盘间隙大于正常范围阈值,与实际情况相符,说明此评估方法可以有效对提升机健康状态进行评估。
6 矿井提升机健康状态预测结果
提升机作为煤矿生产中重要的大型设备,故障率较低。因此,提升机健康状态评估每5 d进行1次,每次获取8个预测值。从健康状态评估数据库中选取2020年3月至12月的488例数据,并选取12月的48例数据作为测试集。考虑到预测的动态性,利用前7个数据预测下一个值,利用滑动窗口机制对未来多天的数据进行滚动预测,并对24 h内的8个预测值取平均值,与实际平均值进行比较。使用滑动窗口预测方法的优点是可以弥补数据量小的不足,通过将训练集预测结果与真值之间的误差反向传播,对SVR模型的参数进行优化。在HHOSVR模型的基础上,以SVR模型中的惩罚因子C和径向基核函数参数γ为HHO寻标目标,以均方根误差 (Root Mean Squared Error,RMSE)、决定系数R2和平均绝对误差(Mean Absolute Error,MAE)为预测性能评估指标。其中,R2值越大,预测值与真值之间的误差越小;RMSE和MAE值越小,预测模型的预测精度越高。
为了验证HHO算法在SVR参数搜索中的优势,选取传统搜索算法PSO,GA,GWO与HHO算法进行比较。在优化过程中,优化算法的总体规模均设置为20,最大迭代次数为50,GA采用二进制编码,HHO中的Lévy飞行参数为1.5,C和γ的取值范围分别为[0,100]和[0,20]。各优化算法的适应度曲线如图7所示。
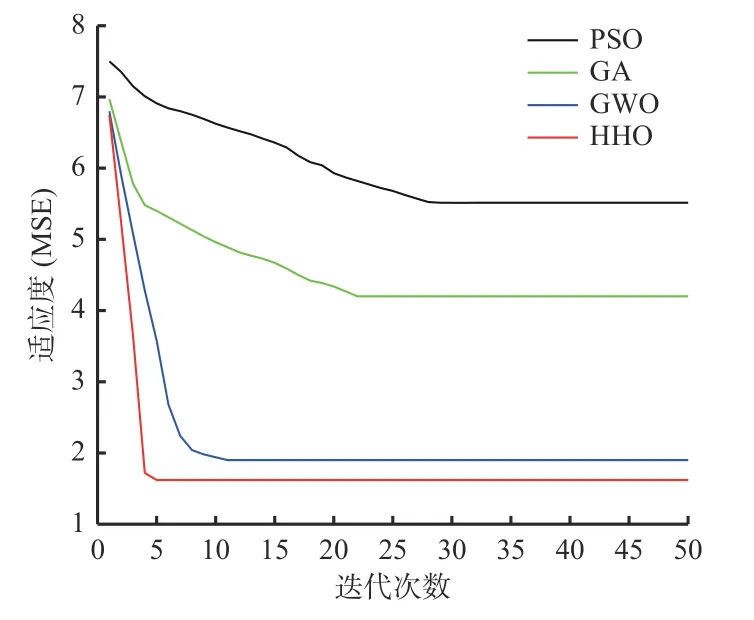
图7 各优化算法的适应度曲线Fig. 7 Fitness curves of each optimization algorithm
利用寻优后参数构建PSO-SVR,GA-SVR,GWO-SVR,HHO-SVR健康预测模型,并利用训练集分别训练4种模型,将训练后的模型分别用于预测测试集。4种模型预测值与实测值的比较结果如图8所示。从图8可看出,提升机整体健康度呈下降趋势。经现场实地查询发现,自12月初以来,提升机轴承系统出现了一定程度的磨损,需要引起重视。与PSO-SVR,GA-SVR,GWO-SVR模型相比,HHO-SVR模型的预测结果更接近实际值,具有更好的预测效果。
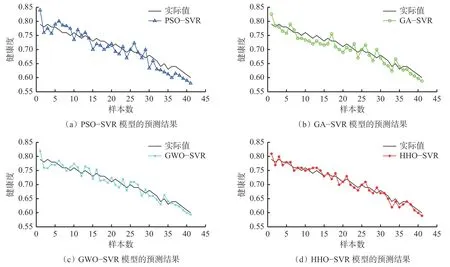
图8 不同模型的预测结果对比Fig. 8 Comparison of prediction results of different models
4种模型的R2及误差对比结果分别如图9、图10所示。可看出,HHO-SVR模型的R2高于其余3种模型,说明HHO-SVR模型的预测值更接近实际值,具有更高的预测精度;HHO-SVR模型的MAE和RMSE低于其余3种模型,说明HHO-SVR模型具有更小的预测误差。上述结果进一步验证了HHOSVR模型具有较高的预测精度和较好的适用性。
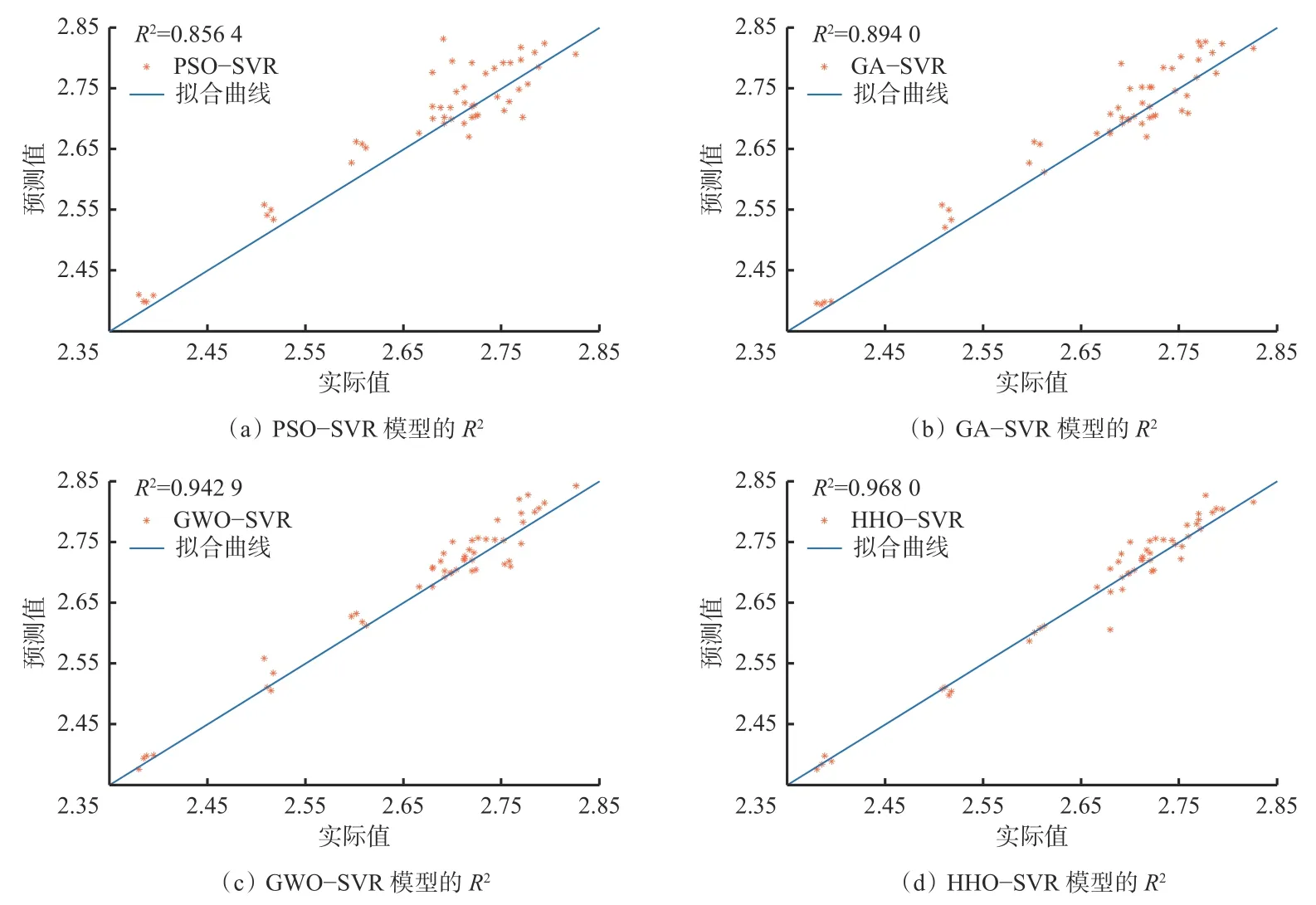
图9 不同模型的R2对比Fig. 9 Comparison of R2 of different models
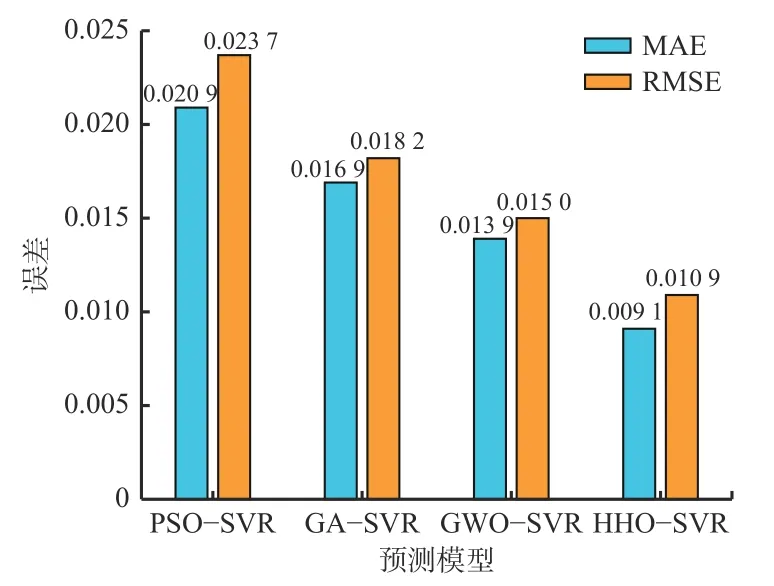
图10 不同模型的误差对比Fig. 10 Comparison of errors of different models
7 结论
1) 根据矿井提升机的历史故障统计和巡检日志,确定了重点监测的子系统和指标,建立了矿井提升机健康状态评估指标体系和评语集,设计了矿井提升机健康状态评估与预测系统。
2) 提出使用健康度对提升机的健康状态进行分级,并使用相对劣化度表征不同类型指标的健康度。为了充分挖掘各子系统和指标数据之间的关系,采用模糊综合评估法计算矿井提升机的健康状态,使用指数标度代替1-9标度对AHP进行改进,避免了判断矩阵校验步骤,降低了计算量。为了降低AHP主观权重对健康状态评估结果的影响,采用CRITIC客观赋权法,根据指标值的变化关系计算各指标的客观权重,最后结合主客观权重计算各子系统和指标的综合权重。为了将健康状态模糊结果转换为清晰的健康等级,设计了半梯形和三角形组合的模糊隶属函数。根据模糊综合评估计算过程和最大隶属原则,得到矿井提升机的健康状态评估结果和故障原因。
3) 在提升机健康状态评估结果基础上,利用HHO算法优化SVR模型的重要参数,构建HHO-SVR模型对矿井提升机的健康状态进行预测,提高健康预测结果的准确性。
4) 实验结果表明:模糊综合评估方法能够准确地实现提升机健康状态评估;与PSO-SVR,GA-SVR,GWO-SVR模型相比,HHO-SVR模型的预测结果更接近实际值,具有更好的预测效果。
