基于BASOA-IEKF融合算法的电池SOC估计
2023-11-09叶丽华施烨璠陈耀阳施爱平
叶丽华, 何 洲, 施烨璠, 陈耀阳, 程 星, 施爱平
(1. 江苏大学 汽车与交通工程学院, 江苏 镇江 212013; 2. 克兰菲尔德大学 水能源与环境学院, 克兰菲尔德 MK43 0AL)
在扩展卡尔曼滤波(extended Kalman filter,EKF)算法模型精度可靠的前提下,电池荷电状态(state of charge,SOC)估计误差主要来源于2方面: ① EKF在系统线性化过程中会产生线性化误差[1],尤其是当系统非线性比较严重时,EKF估计结果会出现很大偏差[2-3]; ② EKF系统噪声协方差和观测噪声协方差通常由计算机随机确定或者人为确定,并没有对噪声矩阵进行优化,这会导致状态估计结果出现较大偏差[4-6].
对于线性化误差,目前常用的改进方法有无迹卡尔曼滤波(unscented Kalman filter,UKF)和粒子滤波(particle filter,PF)等非线性状态估计器,但是其计算成本高.迭代扩展卡尔曼滤波(iterated extended Kalman filter,IEKF)是EKF的高阶扩展,该算法对量测方程进行多次一阶泰勒展开,在有效降低EKF线性化误差的同时能够避免高阶泰勒展开带来的较高计算负荷.
目前对于EKF噪声矩阵多采用智能寻优算法对其进行最优解搜索.人群搜索优化算法(seeker optimization algorithm,SOA)是一种新型人类行为模拟寻优算法[7-8],但是标准SOA算法也存在搜索解边界聚集问题,当某种群个体超出设定的搜索边界后,该个体会被强制赋予边界值,以确保算法的正常运行,但是如果初始设置的解空间范围过小可能会导致种群个体聚集于搜索边界,最终不能得到全局最优解,而解空间范围过大又会浪费计算成本,导致寻优时间增加.
基于以上分析,笔者根据反向学习原理对标准SOA算法的边界条件进行自适应改进,提出一种基于边界自适应人群搜索算法(boundary adaptive seeker optimization algorithm, BASOA)结合IEKF的SOC估计方法,该方法首先利用BASOA算法对IEKF的噪声矩阵进行寻优处理,然后采用优化后的IEKF算法进行SOC估计,从而提升SOC估计精度.
1 电池模型
1.1 等效电路模型建模
在二阶RC等效电路模型的基础上考虑了电池的电压滞回特性,利用电流控制电压源(current controlled voltage source,CCVS)来描述电池的开路电压.标准二阶RC等效电路模型的电压源仅描述了充电或放电状态下的一组开路电压与SOC关系曲线,这会导致电池状态发生变化时(充电或放电)模型输出电压出现偏差,因此,提出了一种改进电压源的二阶RC等效电路模型,如图1所示,其中:IL为电流;UOCV为开路电压;R0为欧姆内阻;R1、R2分别为极化内阻;C1、C2分别为极化电容;U0为R0上的电压;U1为R1C1并联网络电压;U2为R2C2并联网络电压;UT为模型输出电压.
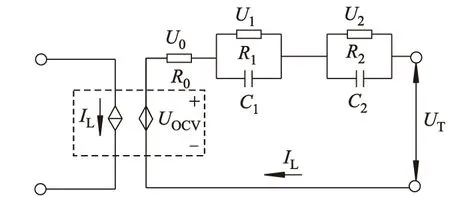
图1 改进二阶RC等效电路模型
电池模型的最终目标是根据输入的电流值准确模拟电池端输出电压,根据基尔霍夫电流电压定律得出该电池模型中各电子元器件的电压微分方程以及端电压表达式如下:
(1)
根据基尔霍夫电流定律可得到电池模型中对应元器件的电流电压微分方程,其离散状态空间表达式如下:
(2)
UT,k=UOCV,k-U0,k-U1,k-U2,k.
(3)
1.2 HPPC混合动力脉冲特性测试
混合动力脉冲特性测试(hybrid pulse power characteristic,HPPC)最早由美国新一代汽车合作计划(partnership for new generation of vehicles,PNGV)于2001年在其测试手册中提出,2003年美国Freedom CAR电化学储能小组编写了《Freedom CAR电池实验手册》,其中收录并详细介绍了HPPC测试的方法流程及测试目的[9].本研究通过充、放电HPPC测试获得电池在充、放电2种状态下的脉冲特性数据,并根据该试验数据进行后续的电池模型参数辨识.以放电测试为例,HPPC测试流程如下:① 恒温箱内25 ℃静置30 min,1.00 C恒流充电至截止电压4.2 V,4.2 V恒压充电至截止电流倍率0.05 C,搁置2 h;② 1.00 C恒流放电0.05 C搁置2 h;③ 2.10 C脉冲放电10 s,搁置40 s;④ 2.80 C脉冲充电10 s,搁置40 s;⑤ 返回步骤②,循环次数≥20次时,退出程序. HPPC测试曲线如图2所示.
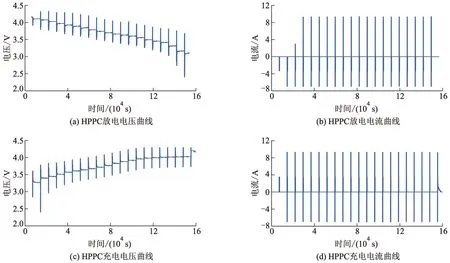
图2 HPPC测试曲线
从图2a、c可以看出:电池在全SOC区间内的脉冲性能良好,在高倍率(≥2.00 C)脉冲放电状态下,当SOC接近0时,由于电池内阻的增大导致其放电压降明显增大,如果此刻持续放电电流过大则会导致锂离子电池工作电压击穿放电截止电压,造成电池过放电,降低电池使用寿命.因此,当三元锂离子电池在使用过程中运行至较低SOC区间时,应尽量避免大电流持续放电,确保电池安全可靠运行.
2 参数辨识及电池试验
2.1 电池内阻参数辨识
以HPPC脉冲特性试验数据为参数辨识依据,采用自适应遗传算法[10]进行内阻参数识别,该算法通过搜索待估计值并将其代入适应度函数,通过迭代计算来寻找最适合于模型的参数.电池模型内阻参数辨识结果为R0=0.041 3 Ω;R1=0.002 1 Ω;R2=0.002 5 Ω;C1=15 300 F;C2=112 400 F.
2.2 多倍率放电测试及电池容量标定
在温度为25 ℃环境下,针对额定容量为3.5 A·h的三洋NCR18650GA三元锂离子电池进行多倍率放电试验,通过库伦计数法得到8组放电容量数据,进行线性插值拟合即可得到0.33~2.00 C的动态容量变化曲线.电池的多组倍率放电电压曲线如图3所示.试验电池的动态容量曲线如图4所示.
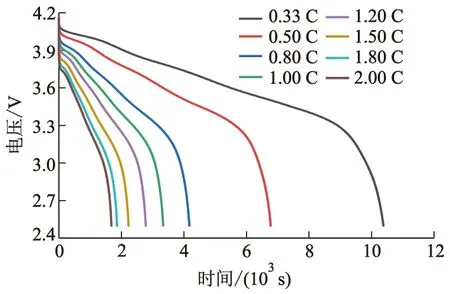
图3 电池的多组倍率放电电压曲线
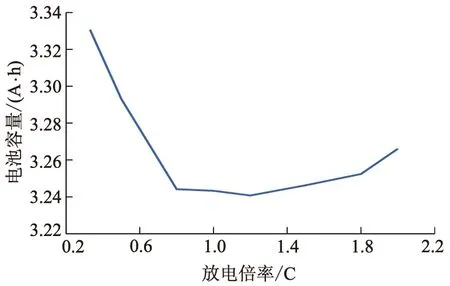
图4 电池的动态容量变化曲线
2.3 UOCV-SOC曲线辨识
在温度为25 ℃,1.00 C倍率下分别进行了充电和放电HPPC特性试验,通过提取搁置段的电压值获得2组离散UOCV-SOC对应点,并对其进行多组高阶多项式拟合.采用MATLAB拟合结果显示,放电状态UOCV-SOC的9阶多项式拟合曲线均方根误差(RMSE)值最低,而充电状态UOCV-SOC的6阶多项式RMSE值最低,此时UOCV-SOC曲线的拟合效果也最好.充、放电状态下的UOCV-SOC拟合曲线如图5所示,由于锂离子电池电压的滞回特性[11],其充电电压不同于放电电压,当电流IL为负时,表示电池正在放电,此时UOCV=UDOCV,UDOCV为放电状态下电池开路电压;当IL为正时,表明电池正在充电,此时UOCV=UCOCV,UCOCV为充电状态下电池开路电压.
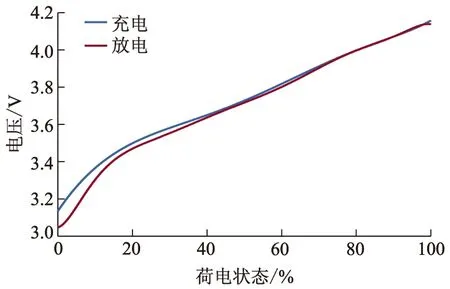
图5 充、放电UOCV-SOC曲线
2.4 模型电压验证
将辨识得到的模型参数代入对应的模型状态方程中,以MATLAB脚本程序作为模型实现载体,然后以城市道路循环(urban dynamometer driving schedule,UDDS)工况下的试验电流数据为激励,对比分析对应的模型输出电压与试验真实电压的契合程度,如图6所示,模型输出电压平均误差为0.011 5 V,具有较高精度.
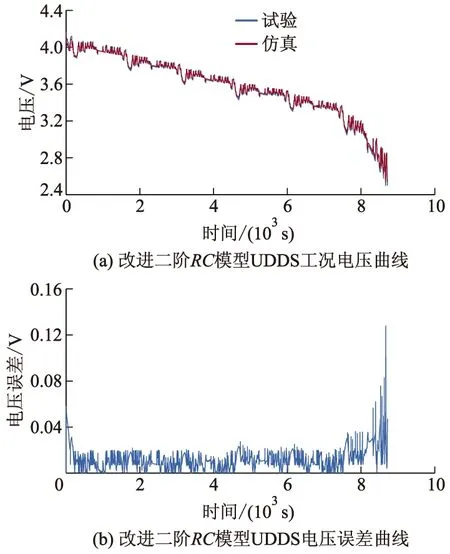
图6 UDDS工况模型输出电压精度验证曲线
3 BASOA-IEKF融合算法SOC估计
3.1 IEKF算法原理
IEKF算法是标准EKF算法的高阶扩展,其本质是将EKF的先验估计值视为状态新息,并将其代入状态估计步骤进行多次迭代来逼近真实值, IEKF算法递推估计流程如图7所示,其中N为仿真数据总量.
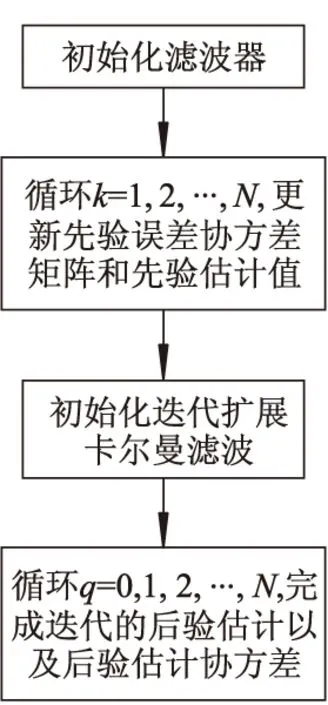
图7 IEKF算法递推估计流程图
3.2 BASOA算法寻优原理
3.2.1标准SOA算法
标准SOA算法在噪声寻优搜索过程中利用搜索值的适应度值来判断个体对系统的适应性,并根据其进行下一步个体位置的更新.在噪声优化中SOA算法所要搜寻的个体即为IEKF算法中状态变量所对应的过程噪声协方差和量测噪声协方差.在进行噪声寻优之前需要先定义待搜寻个体的范围、种群规模以及迭代次数,然后产生初始种群,并依据适应度函数来评价种群个体的适应性.在仿真计算过程中适应度函数由SOC估计的均方根误差来表示,即
(4)
式中:SOCR,k为真实的SOC;SOCE,k为IEKF算法估计的SOC.
得到初始种群并依据适应度函数找出当前个体最优值和全局最优值后,需要对初始种群的位置进行改变以得到新的种群.首先要确定SOA算法搜索步长,高斯隶属度为
uA(x)=exp[-(x-u)2/2δ2],
(5)
式中:x为输入值,即个体的适应度值;u和δ为隶属参数值.
设定umin=0.011 1.搜索步长计算公式为
(6)
式中:aij为j维搜索空间内第i个个体的搜索步长;δij为高斯隶属函数参数;uij为j维搜索空间内第i个个体的隶属度.
uij=rand(ui,1),
(7)
δij=ω|xmin-xmax|,
(8)
式中:ui为搜索空间内第i个个体的隶属度;xmin、xmax分别为种群粒子的坐标最小值和最大值;ω为惯性权重.
ω=(Mmax-M)/Mmax,
(9)
式中:Mmax为种群最大迭代次数;M为种群当前迭代次数.
随着迭代次数的增加,惯性权重ω越小,从而搜索步长越小.确定搜索步长后需确定个体的利己方向di,ego(t)、利他方向di,alt(t)和预动方向di,pro(t),将3个方向进行随机加权平均可得到最终的搜索方向,计算公式如下:
di,ego(t)=pi,best-xi(t),
(10)
di,alt(t)=gi,best-xi(t),
(11)
di,pro(t)=xi(t1)-xi(t2),
(12)
dy(t)=sgn(ωdij,pro+φ1dij,ego+φ2dij,alt),
(13)
式中:pi,best为第i个个体经历过的最佳位置;gi,best为第i个个体的全局最佳位置;xi(t1)和xi(t2)分别为(xi(t-2),xi(t-1))、(xi(t-1),xi(t))中的最佳位置;φ1和φ2为[0,1]内的随机数.
确定搜索方向和搜索步长后,对个体位置进行更新的公式如下:
Δxij(t+1)=aij(t)dij(t),
(14)
xij(t+1)=xij(t)+Δxij(t+1),
(15)
式中:xij(t+1)为更新的个体位置参数;Δxij(t+1)为更新的位置参数;dij为搜索方向.
3.2.2边界自适应人群搜索算法
标准SOA算法通过自适应变化搜索步长和搜索方向避免个体陷入局部最优解,相较于其他智能优化算法,其具有较高的计算效率,但是标准SOA算法在个体搜索边界设置上存在问题.首先,在算法执行前通常按经验设置解空间的边界,当某种群个体超出设定的搜索边界后,该个体会被强制赋予边界值,确保算法的正常运行,但是,如果解空间范围过小可能会导致种群个体聚集于搜索边界,最终不能得到全局最优解,而解空间范围过大又会浪费计算成本.根据反向学习原理,对标准SOA算法的边界值设置方法进行改进,建立BASOA算法.BASOA的自适应边界条件如下:
(16)
式中:Xi为某代种群中第i个搜索个体,i=1,2,…,S,S为种群个体数;p为边界自适应变化次数,初始值为0;Xmax,p为种群最大个体值;Xmin,p为种群最小个体值;b为边界自适应变化参数,取1.25;size为矩阵元素数量统计函数.
式(16)表明,当种群中搜索到的个体值大于边界值时,该值并不会集中到边界上,而是通过反向随机赋值得到解空间内的新个体值,而当某代种群中超过25%的初次搜索个体都超出解空间边界时,说明该解空间的范围可能过小,算法很难找到最优值,这时利用边界自适应参数实时调整解空间边界,从而扩大搜索范围,最大限度提升SOA算法的全局寻优能力.
3.3 SOC仿真结果验证
分别在1.00 C恒流放电工况、HPPC工况以及UDDS工况下进行了BASOA-IEKF算法验证,并对比分析单一IEKF算法的估计结果.以无噪声的试验电流数据作为安时积分法的数据来源计算真实SOC,记为SOCT;单一IEKF算法的SOC估计结果定义为SOCI,该算法中的噪声协方差由系统随机生成;BASOA-IEKF的SOC估计结果记为SOCBI,其噪声协方差矩阵是BASOA算法优化后的结果.不同算法SOC仿真估计曲线及其误差曲线如图8所示,无论在静态工况还是动态工况下,BASOA-IEKF算法的SOC估计精度整体高于单一IEKF算法,静态工况BASOA-IEKF最大绝对误差为3.74%,平均误差为0.53%,而单一IEKF算法在估计后期最大绝对误差达到11.68%,已经远超出合理误差范围;HPPC工况下2种算法的最大误差都出现在脉冲电流区域,这是由于脉冲电流倍率较大,电池模型参数不匹配导致,但是BASOA-IEKF算法的SOC估计绝对误差仍小于3.00%,而单一IEKF算法的最大绝对误差则达到7.45%;UDDS工况能够验证算法在较强动态特性下的SOC估计性能,该工况下BASOA-IEKF算法的SOC估计误差小于2.50%,估计误差曲线表现更平稳,说明其全局鲁棒性更优.
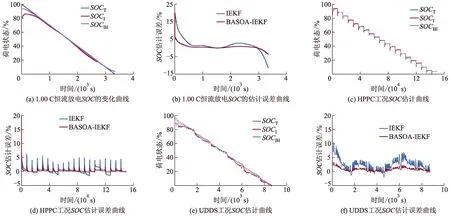
图8 不同工况下SOC估计结果
4 结 论
1) 采用改进二阶RC等效电路模型作为电池底层电路,并用电流控制电压源表示模型开路电压,在不同放电倍率条件下辨识了动态容量曲线,使用自适应遗传算法进行了模型参数识别,结果表明,该模型的电压输出平均误差为0.011 5 V,可以准确描述锂离子电池的电压特性.
2) 对标准SOA算法进行了边界自适应改进,避免了搜索值出现边界聚集效应,提高了算法的寻优计算效率,提出的BASOA-IEKF融合算法在降低标准EKF算法系统线性化误差的同时对其噪声协方差矩阵进行优化处理,静态和动态工况仿真结果表明:相比于单一IEKF算法的SOC估计,BASOA-IEKF算法的SOC估计精度更高,寻优时间更快,计算成本相对较低,初期收敛速度更快,全局鲁棒性更优.