无人船在油气管道水域穿越工程中的应用
2023-11-06万仕平
万仕平
中国石油工程建设有限公司西南分公司, 四川 成都 610041
0 前言
精确测量水下地形是油气管道水域穿越工程的重点和难点,是油气管道建设的重要数据支撑,在工程设计、施工和运维工作中十分重要[1-2]。传统依靠人力和载人船具辅助测深杆、测深锤、测深仪等方法采集水下地形数据,面临诸多问题:通航水域过往船具流量大,租赁船具作业窗口期短,效率低下;局部水域生态保护,禁止载人船具通行,实施水下地形测量困难;采用常规测深杆、测深锤测量水下地形点密度较低,精度难以保障;多波束等专业测深仪操作程序复杂,且涉及大型船具,作业条件要求较高;作业人员涉水,存在安全隐患。近年来,无人测量船(以下简称无人船)发展快速,凭借其便捷、高效、全面、安全的数据采集方式,能够全面反映水域深度和水下地形情况,在工程建设中得到了广泛应用[3-7]。本文介绍了无人船的工作原理、技术特点和作业流程,并结合某LNG管道大型河流穿越工程案例,总结无人船在油气管道水域穿越工程应用中的相关作业方法和工作内容,最后与传统水域测量的成果精度、工作效率和经济效益进行对比分析。
1 无人船工作流程
1.1 工作原理
无人船集成了测深、定位、导航、视频监控等设备,装载有多重传感器,可按设定任务全自动完成水域地形测量工作[8-9]。无人船的测深系统采用自身携带全球导航卫星系统实时动态相对定位(Global Navigation Satellite System Real Time Kinematic Relative Positioning,GNSS RTK)和单波束测深仪相结合的方式对水体单元位置和深度进行计算[10]。工作原理具体表现为:利用换能器往水底发射声波,当声波遇到障碍物(即到达水底)时会反射回换能器,根据声波往返时间和所测水域中声波传播的速度,可计算换能器和水底的距离,加以改正后得到深度;同时通过GNSS RTK接收信号,对无人船进行实时动态定位,通过对测深点相对船体位置改正、吃水改正和测深数据,实时获得水域定位点的坐标和深度[11],从而实现水下地形数据的获取,见图1。

图1 无人船工作原理示意图
在测量过程中,首先测得GNSS RTK天线几何中心坐标及高程,减去GNSS RTK天线到水面的垂直距离,即可得到水面高程;其次根据换能器底部到水面的距离(吃水改正),加上换能器到水底的距离,得到水深;最后由水面高程减去水深,得到水下测量点的高程,GNSS RTK天线垂直投影水面点的坐标即为换能器和水下测量点的坐标[12-13]。
水面高程计算公式为:
H1=H0-h1
(1)
水深计算公式为:
h=h2+h3
(2)
水下测量点高程计算公式为:
H=H1-h
(3)
1.2 技术特点
近年来,无人船研发迈入了新阶段,智能化应用趋势显著。在水下地形测量工作中,与传统测量方法相比,无人船具有机动、灵活、安全性高的特点,可在环境复杂、工况恶劣的水域作业。
1)安全可靠,减少事故。无人船通过全自动驾驶和避障系统,遥控采集水域地形数据,杜绝了人员和载人船具因涉水而引发的伤亡事故,保障人民生命财产安全。
2)数据采集范围和位置准确。自动导航和驾驶系统根据用户输入的测量范围和航线设计,结合GNSS RTK技术可实施厘米级精度的导航和定位,保障测量范围满足设计需求,利用规划的航线轨迹,可实施精确的水下地形断面点采集。
3)适应范围广。无人船由于船体载重小,吃水浅,结合其避障系统,可广泛应用于通航、生态保护、浅滩、池塘等各种水域。
1.3 作业流程
利用无人船开展测量工作,首先利用既有图纸和资料进行航线设计,并将设计航线导入控制系统(遥控手薄),待设备安装连接、调试和参数设置完毕后,船体下水按设定航线自动或手动驾驶模式进行数据采集;其次在数据采集过程中,需根据具体水域情况调整回波质量[14],采集完成后返航并下载数据,经内业整理转换后,输出测深成果数据。无人船作业流程见图2。
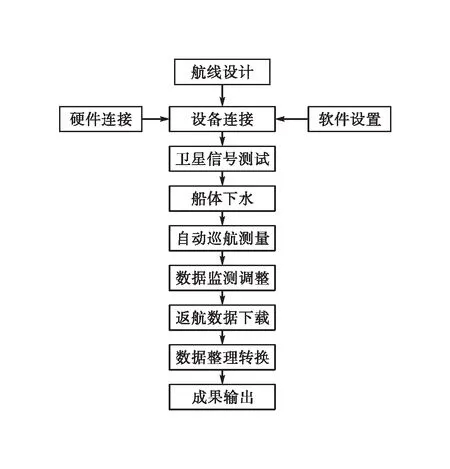
图2 无人船作业流程图
2 应用实例
2.1 工程概况
以某LNG管道大型河流穿越工程的水域地形测量为例,管道穿越位置附近的河流常年水面宽度约300 m,属于非通航水域,项目要求按1∶1 000 比例尺精度施测,测量范围为穿越轴线两侧各100 m。测量时为枯水期,平均水深6~8 m,最大水深约17 m,流速约 0.5 m/s,河流局部因采沙遗留沙坑、浅滩及孤岛,水域地形复杂。
2.2 数据采集
2.2.1 设备情况
采用某品牌无人船实施该工程的水域测量工作,无人船主要参数见表1。

表1 无人船主要参数情况表
2.2.2 数据采集
测区水域情况复杂,采用全自动无人驾驶模式作业方式具有搁浅和遇障的风险,故采用手动控制方式,进行目视并辅助实时摄像视频开展数据采集工作。参照穿越轴线两侧各100 m范围间隔约每10 m实施1条航线[15],测点间距为5 m,设定航行速度为1~2 m/s,有效采集测深点1 067个,作业时间约2 h。针对浅滩、孤岛和水草附近区域,尽量保证一定的安全距离,避免船体搁浅、碰撞或被缠绕。数据采集完成后,船具返航,并及时下载测深数据。无人船航行轨迹约5.1 km,有效测线长度约4.6 km。无人船航行轨迹见图3。

图3 无人船航行轨迹图
2.3 数据处理
2.3.1 数据检查
内业数据处理主要通过无人船随机软件进行水深采样,根据水深图的回波记录,在模拟回波和数字水深叠加数据上进行水深噪点数据的剔除[16],仅保留准确水深数据,见图4。
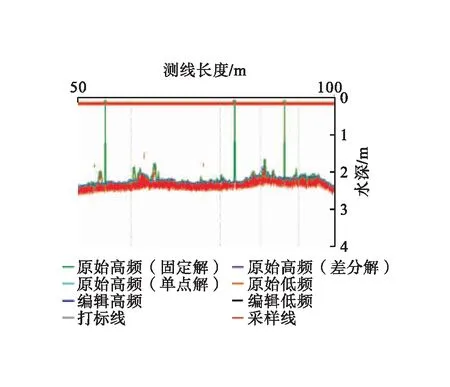
图4 水深噪点剔除图
2.3.2 数据改正
数据检查完毕后,保存测深数据,并进行水面高程改正,即RTK验潮。具体方式为通过测线滤波,如水面高程基本不变,则说明测量期间无涨、落潮现象,水量和流速均较稳定,可不进行水面高程改正;否则测线应根据实际情况,进行固定水位、单站水位或区域水位改正。确认水位改正后,即可输出测深数据成果。
2.4 应用分析
2.4.1 精度分析
无人船测量完毕后,为检验水域地形精度情况和可靠性,现场采用测深杆对近岸和浅滩区的水域进行人工测量。获取水域地形点76个,深度范围为0.5~3 m。根据GB/T 50539—2017《油气输送管道工程测量规范》关于水域地形测量的精度要求,3°≤水底地形倾角<10°时,等高线插求点或数字高程模型格网点相对于邻近控制点的高程中误差,不应>2/3等高距(等高距为0.5 m)[17-18]。通过人工测量水域地形点与无人船测量水域地形点生成的数字高程格网同位置插求高程进行比较计算[19-20],高程中误差为0.21 m,高程允许中误差为0.33 m,无人船测量成果精度满足规范要求。
2.4.2 作业效率
传统管道大型河流穿越工程水下地形测量作业方式采用租赁载人船具,在船舷安装测深仪器和GNSS RTK设备,测深设备外形较大、较重,安装时间较长,测量前的准备工作及航行到测量区域用时较长,施测时主要靠人工导航方式进行水面测绘工作。该工程中,在与之类似的另外一条大型河流穿越工程水域测量工作中,采用了租赁载人船具搭载测深仪和GNSS RTK设备开展水域地形工作,船具停靠需选择在穿越处下游2 km的码头,传统测深设备安装测试及船具往返时间约5 h,实际有效测量作业时间4 h,测量工作时间约9 h,加上前期船具协调时间约2 d,总体计划和实施时间为3 d。在图3所示河流穿越水域测量中,无人船现场组装设备和连接下水时间15 min,航行及测量时间40 min,返航及拆卸时间15 min,总体时间可控制在2 h内。经统计,与传统租赁船具测量相比,在本项目中无人船能够有效提高作业效率500%~600%。
2.4.3 经济效益
无人船在某LNG管道大型河流穿越工程中的应用,克服了租赁船具的困难,不必因采用机动船具作为搭载平台产生必要的燃油费,避免了噪声污染及对部分大气和水体等的排放性污染,较传统租赁载人船测量方式更加环保和经济。通过轻量、精简和高度集成化的设备,节约了人力、物力,一次作业即可减少因租赁机动船具而产生的数千或上万元的租赁及相关人工成本费用。因此,从长期使用方面来看,无人船的应用具有较大的经济效益。
3 结论
无人船的发展和应用,为油气管道水域测量作业带来了一种全新的、自动化程度高的测量模式。在河流流速适中、深度适当的情况下,无人船可作为首选水域测量方法。工程应用实例数据情况表明,较传统水域地形测量方法而言,无人船水下地形测量方法在保障人身安全、作业效率和成果精度情况方面,均有极大的提升,可为油气管道河流穿越设计工作提供准确的测绘成果,能够有效缩短设计工期和提升设计成果质量,并有效规避安全风险,具有较高的经济效益和社会效益。
