微液滴/注液表面黏附行为的主被动控制及机理
2023-11-06张学仁张亚锋顾兴士余家欣
张学仁,张亚锋*,顾兴士,余家欣
微液滴/注液表面黏附行为的主被动控制及机理
张学仁1,张亚锋1*,顾兴士2,余家欣1
(1.西南科技大学 制造过程测试技术教育部重点实验室,四川 绵阳 621010;2.中国空气动力研究与发展中心 结冰与防除冰重点实验室,四川 绵阳 621000)
提出一种微液滴/注液表面黏附行为主/被动控制方法,探究在电压和流体黏度耦合作用下微液滴/注液表面黏附行为动态可调机理。在P型硅片表面制备超疏水层,注入黏度分别为10、50、100 mm2/s的聚二甲基硅油制得注液表面,使用固液界面行为测试仪探究不同黏度和外加电压下微液滴/注液表面的黏附行为。当聚二甲基硅油黏度从10 mm2/s增加到100 mm2/s,微液滴/注液界面润湿力从194 μN减小到123 μN,最大相互作用力从129 μN减小到94 μN,分离力从101 μN减小到82 μN;当电压从0 V增加到240 V时,润湿力从156 μN增加到322 μN左右,最大相互作用力从120 μN增加到178 μN左右,分离力从85 μN减小到53 μN左右,实现了黏附力的动态调节。高黏度聚二甲基硅油内部具有较强的剪切力,但是长链会增强微液滴/注液表面氢键作用,在2种作用形式的耦合下,润湿力、最大相互作用力以及分离力随黏度的增加而减小。在电压作用下,微液滴在注液表面产生电润湿行为,有效界面能随电压发生非线性响应,实现了固液界面黏附力的实时调节。微液滴/注液表面可以通过改变电压与润滑油的黏度实现黏附行为的主/被动的调节。
微液滴;注液表面;黏附;电润湿;界面调控
微液滴的操控与运输技术在液体转移、药物运输和微流控芯片等领域受到越来越多的重视与关注。固液界面黏附行为是液滴操控与运输技术中的关键科学问题。固液界面黏附行为可采用被动控制与主动控制2种方式实现。被动控制是指利用物理化学方法永久性改变固体表面的形貌或表面能,如在固体表面制造微结构或在表面涂覆具有不同表面能的化学试剂,降低或增加固体表面能,改变微液滴在固体表面的润湿性,进而实现固液界面黏附行为的调节[1-6]。但是固体表面完成制备或改性后,其表面性质就已经固化,无法在使用过程中进行更改或实时调节,且该表面受到不同程度的损伤时,还容易造成其功能丧失,难以修复。因此,主动控制固液界面黏附行为的方式得到了越来越多的关注和重视。目前,固液界面黏附行为可以通过机械拉伸、磁场、温度和光等外部能量进行调节。Lou等[7]利用机械拉伸改变柔性材料的体积以及表面几何形状,从而实现了表面黏附性质的控制,Jiang等[8]将磁性物质融合到固体表面,使其具备磁响应功能,进而利用磁性改变表面粗糙度,实现了黏附行为的可控调节。Yao等[9]利用有机材料表面的温度响应特性控制界面的黏附行为。Wang等[10]采用低温水热法合成了光敏TiO2表面,通过光照实现了表面润湿性在疏水和亲水之间的可逆转换。Kloxin等[11]利用光敏表面改变表面粗糙度以及表面结构密度,使表面黏附性能具有光响应特征。Li等[12]在表面喷涂具有电场响应的TiO2纳米粒子形成介电弹性体,通过电场力实现了表面黏附性能的动态调节。分析发现,此类方法虽然在一定程度上能实现固液界面黏附行为的调节,但存在界面行为响应时间长、能耗高、被控液滴二次污染等问题,限制了该类技术在工程实践中的应用。因此,亟需研究具有响应时间快、能耗低、无污染的界面黏附行为主动控制方法。
介质上电润湿是利用外加电压改变固液界面的有效界面张力,实现微液滴润湿状态快速变化和响应的物理现象[13-14]。该技术具备响应时间快、结构简单、成本低等优点,在固液界面黏附力动态调节方面具备很强的应用潜力。但是在固体表面进行介质上电润湿试验时,常发生接触角滞后现象,即电压卸载后液滴无法完全恢复到原始状态,使界面黏附行为无法实现可逆调节。近年来,注液表面由于在抗污[15-17]、抗结冰[18-21]、抗黏附[17]、自清洁和吸附[20]等领域具有广泛的应用前景,受到了研究者的广泛关注。不仅如此,微液滴在注液表面的接触角滞后较小[22],为在注液表面构建介质上电润湿系统提供了条件。
基于此,本研究拟通过在超疏水表面添加润滑油(聚二甲基硅氧烷)制备注液表面,通过外加电压构建微液滴/注液表面介质上电润湿系统,并系统研究润滑油黏度对微液滴/注液表面黏附性能的影响。通过外加电压动态调节微液滴/注液表面的黏附力,探究润滑油黏度与外部电压耦合作用下微液滴/注液表面黏附力的动态变化行为和机制。
1 试验
1.1 液体注入结构表面制备
将P型硅片(SSPP,Siltronic, Germany)切割成20 mm×20 mm大小作为基底。为了确保导电性能,先使用180目砂纸粗磨,然后使用800目砂纸精磨硅片背面氧化层,直至氧化层脱离。然后使用超声波清洗机(DSA50-GL,DeSheng,China)将硅片分别置于丙酮、酒精中进行超声清洗。采用喷涂法将超疏水喷雾(Never-Wet,Rust-Oleum,USA)均匀喷涂在硅片上,在26 ℃干燥环境下静置1 h,形成超疏水薄膜。通过白光干涉扫描仪(MFT-3000, Rtec, USA)测得超疏水薄膜的表面粗糙度约为(233±5) nm,厚度约为500 nm,如图1a所示。最后在超疏水表面悬滴5 μL黏度分别为10、50、100 mm2/s的硅油(PMX200,DOWSIL,USA),水平静置8 h制得注液表面,如图1b所示。
1.2 电压下的润湿试验和动态控制试验
使用接触角测量仪(DSA30E,KRUSS,German)进行液滴在注液表面静态介质上的电润湿试验。使用导电银胶(3812,Ausbond,China)将制备好的硅片固定在40 mm×40 mm×0.3 mm的铜片上,铜片与直流电源(PSW250-4.5,GuWei,China)的负极相连。将铜片放置于测量平台上,然后将体积为10 μL的液滴悬滴于注液表面,再将铜丝从液滴顶部插入液滴内部,并将铜丝与直流电源正极相连,如图2所示。静态介质上电润湿试验分为加载与卸载2个阶段,加载过程中电压从0 V逐渐提升到240 V,加载速度为10 V/s。加载电压达到240 V后,开始卸载过程,将电压逐渐降低到0 V,卸载速度为10 V/s。在加载与卸载过程中,使用高速摄像机记录液滴在注液表面上的接触角以及接触线变化。
1.3 液滴与液体注入结构表面之间相互作用力试验
使用固液界面行为测试仪对界面黏附行为进行测试。试验设备由光学摄像机、电动位移平台、激光位移传感器、悬臂梁组成。当液滴与样品表面接触后,在液滴与表面之间相互作用力的作用下,悬臂梁发生弯曲,此时激光位移传感器记录悬臂梁的偏转量Δ,如图3所示。液滴与样品表面之间的相互作用力可由=Δ得到,其中可为悬臂梁弹性系数,可由微液滴重力法标定。本试验中,悬臂梁弹性系数=0.693 N/m。
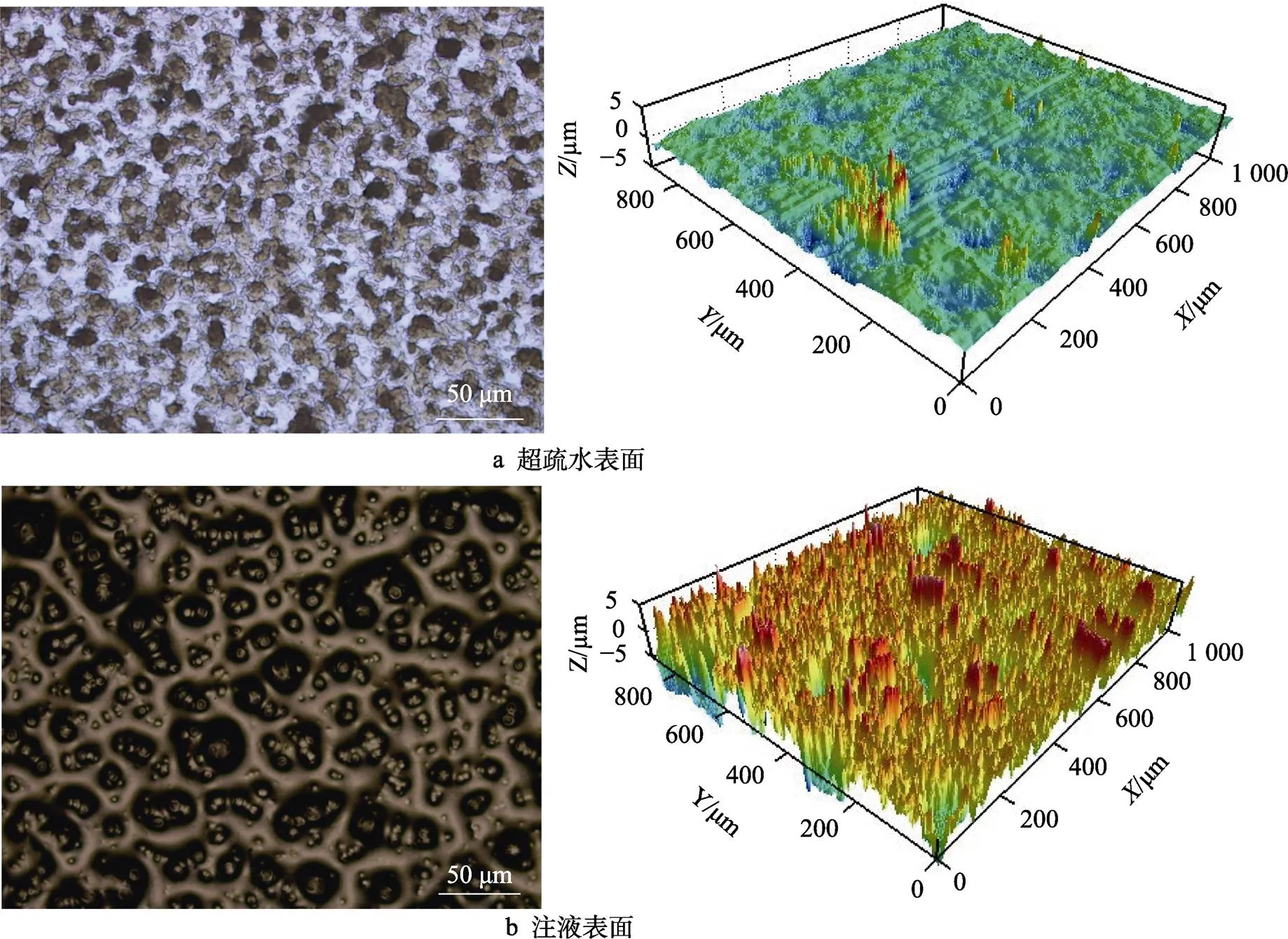
图1 超疏水表面以及注液表面二维形貌和三维形貌
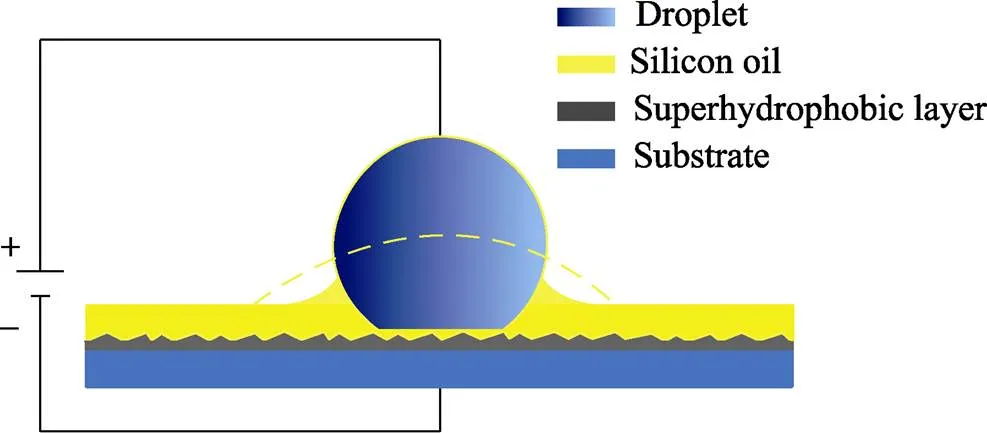
图2 液滴在注液表面上的电润湿行为
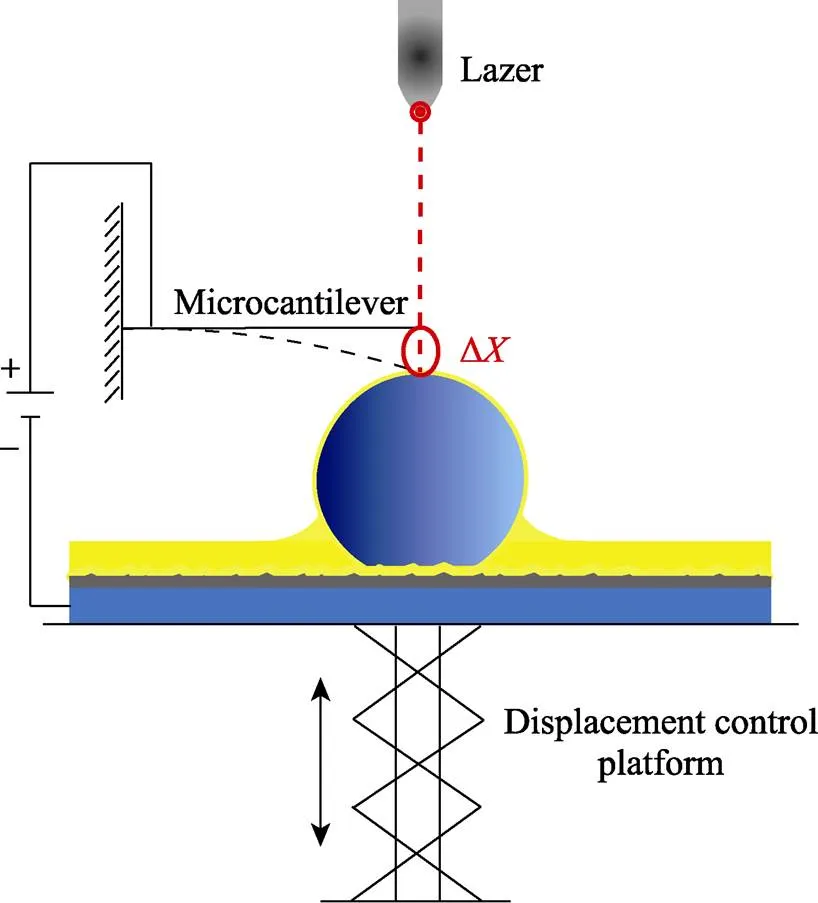
图3 液滴与注液表面黏附力测试原理
液滴/注液表面黏附力测试分为3个阶段。首先,将液滴固定在悬臂梁上,利用控制器控制位移平台使注液表面以0.3 mm/s的速度向上靠近液滴,直到液滴与注液表面接触,获得润湿力大小;其次,待悬臂梁达到平稳状态后,位移平台向下运动,使微液滴与注液表面开始分离,获得最大相互作用力;最后,位移平台持续下降,直到液滴与注液表面完全分离,获得分离力。电压下的黏附力测试过程也分为3个阶段,但是在测试过程中会施加一个恒定电压。
2 结果及分析
2.1 微液滴与注液表面的相互作用力
微液滴与注液表面相互作用力的典型曲线如图4所示。分析发现,微液滴与注液表面的相互作用力由润湿力、最大作用力和分离力3部分构成。当微液滴与注液表面还未接触时,相互作用力为0(阶段Ⅰ)。当微液滴与注液表面接触的瞬间,微液滴将在注液表面铺展,导致悬臂梁变形,获得微液滴与注液表面间的润湿力(见图4中A点)。此时,液滴与基底接触后,位移平台立即停止,并等待悬臂梁振荡完全结束(阶段Ⅱ)。然后位移平台向下运动,使微液滴与注液表面分离,获得最大相互作用力(见图4中B点)。随着位移平台的进一步移动,微液滴与注液表面发生完全分离(见图4中C点),分离瞬间获得分离力,悬臂梁振荡一段时间后逐渐趋于平稳。

图4 微液滴/注液表面相互作用力的典型变化曲线
2.2 液滴在注液表面上黏附行为的被动控制方法
本研究中通过改变注液表面润滑油黏度来实现微液滴/注液表面黏附行为的被动控制。黏度对微液滴/注液表面相互作用力的影响如图5所示。随着注液表面润滑油黏度的增加,润湿力、最大相互作用力及分离力均有所降低。当表面润滑油黏度从10 mm2/s增加到100 mm2/s,润湿力从194 μN减小到123 μN,最大相互作用力从129 μN减小到94 μN,分离力从101 μN减小到82 μN。因此,润滑油黏度的增加,会造成液滴与注液表面之间的相互作用力减小。
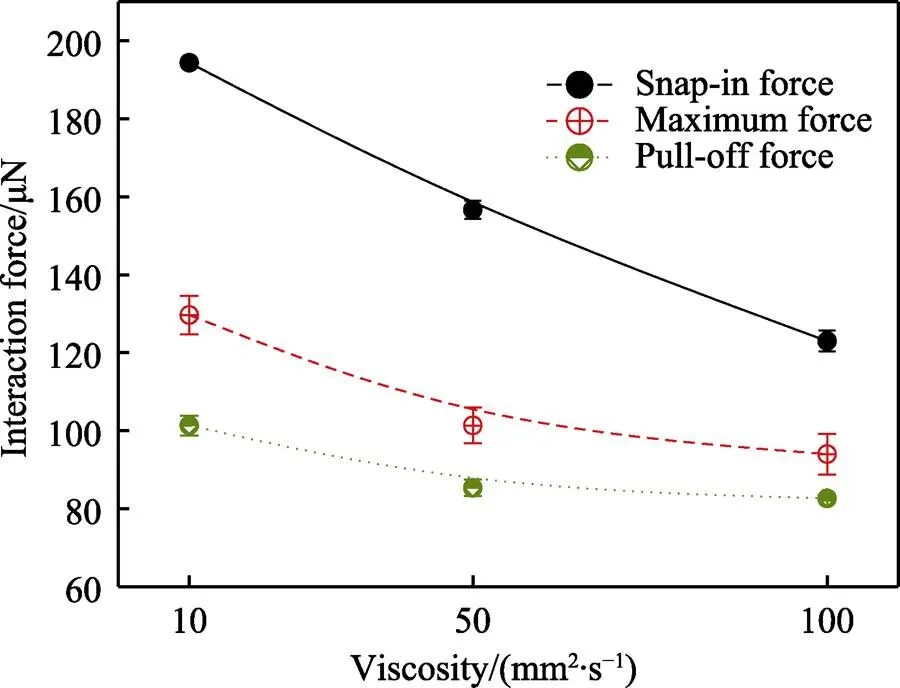
图5 润湿力、最大作用力和分离力随注入液黏度的变化趋势

式中:lv为水气表面张力;ov是油气表面张力;ol为油水表面张力;为液滴表观接触角。由于注液表面内部切应力对液滴铺展会产生影响,可将切应力的影响引入式(1)。为润滑油的厚度,为润滑液产生的剪切力,即:

由式(2)可以看出,此时微液滴在四项力的作用下在注液表面达到平衡。因此,当润滑油黏度越大,微液滴铺展受到的阻力越大,此时通过仪器采集到的铺展力越小。这与Baek等[23]的试验结果一致,即润滑油黏度越大,切应力越大,微液滴铺展的能量耗散越大。

图6 液滴在注液表面润湿过程受力
此外,微液滴与注液表面相互作用的最大力随着润滑油黏度的增加而降低,当润滑油黏度从10 mm2/s增加到100 mm2/s时,最大力从129 μN减小到94 μN。微液滴与注液表面的最大相互作用力发生在2个表面分离的过程中。Sun等[24]指出,液滴与注液表面分离过程中的力可以通过式(3)进行估算。

式中:为液滴与注液表面接触线半径;re为后退接触角;Δ为拉普拉斯压力差;1和2为液桥的曲率半径。
微液滴在不同黏度注液表面的相关参数见表1。可以发现,1随黏度的增加变化不大,而2随着黏度的增加减小。结果表明,随着润滑油黏度的增大,微液滴分离过程中最大力在液桥出现“颈缩”之前。通过式(3)计算可得出,当黏度从10 mm2/s增加到100 mm2/s时,最大相互作用力从约207.26 μN减小到了约191.09 μN。如图7所示,分离过程中,接触线收缩,需要克服润滑油的黏度产生的切应力做功。因此,随着黏度的增加,三相接触线在润滑油界面运动时需要更大的力。此时,微液滴分离过程中产生变形,导致曲率2不断减小,液桥在分离的过程中更加容易出现断裂。因此,微液滴在低黏度注液表面容易在界面发生分离,而在高黏度注液表面时,液滴与注液表面并不会发生完全分离,有一部分液滴会残留在注液表面,如图8所示。即随着润滑油黏度的增加,液滴从注液表面分离由界面分离趋向于界面分离和液桥断裂结合的方式,此时分离力从约101 μN减小到约82 μN。上述结果表明,随着润滑油黏度的增加,微液滴与润滑油的相互作用力会增加,从而导致微液滴的分离模式发生改变,进一步改变了最大力和分离力。
此外,在本试验中所使用润滑油为聚二甲基硅油,其主要组成部分为聚二甲基硅氧烷。润滑油黏度的增加,油中的分子链长也会增加,因此聚硅氧烷中氧原子的电子密度增加(如图9所示),而这会导致水中的氢原子与聚硅氧烷的原子间的氢键加强[25-26],继而使液滴与润滑油之间的相互作用力增加,最终导致液滴在界面铺展和回缩时的阻力增加,从而导致润湿力、最大力和分离力均随着黏度的增加而改变。
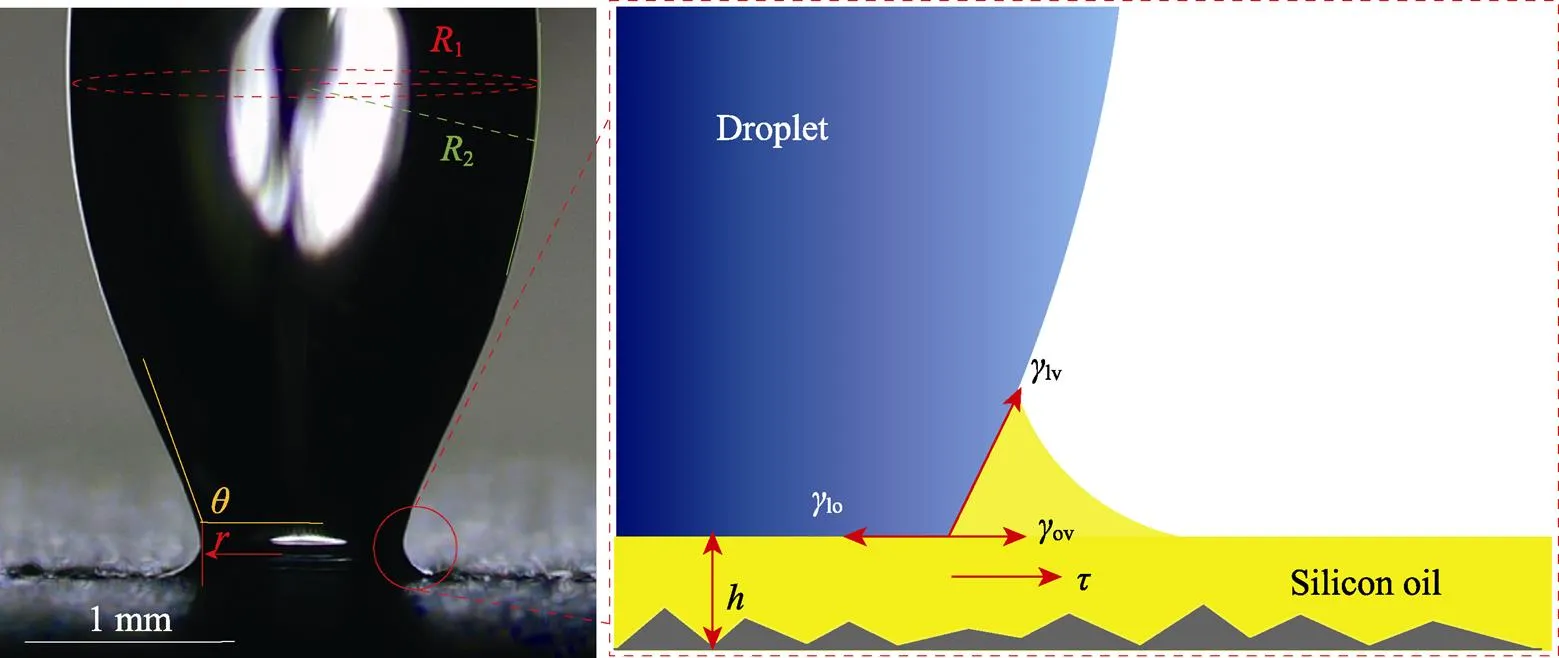
图7 液滴与注液表面拉伸时界面受力
表1 注入液黏度与液滴外形参数及最大作用力的关系

Tab.1 Relationships between infused liquid viscosity and droplet shape and maximum interaction force
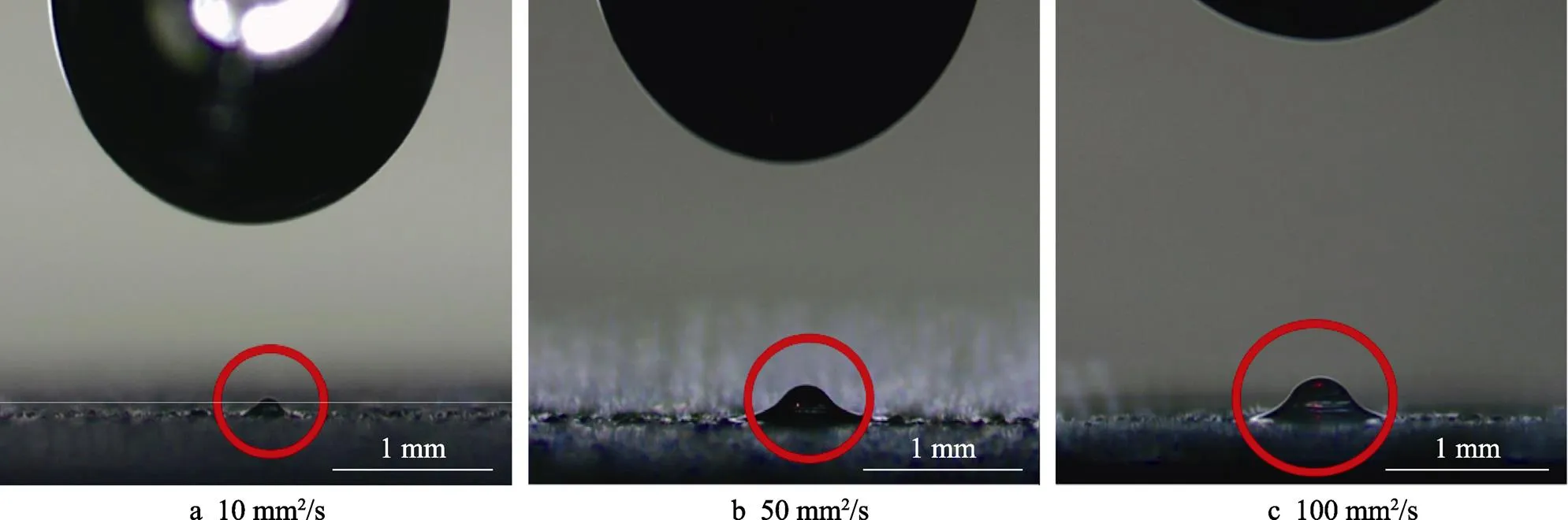
图8 微液滴与注液表面分离后在注液表面残留的液滴,注入液黏度分别为
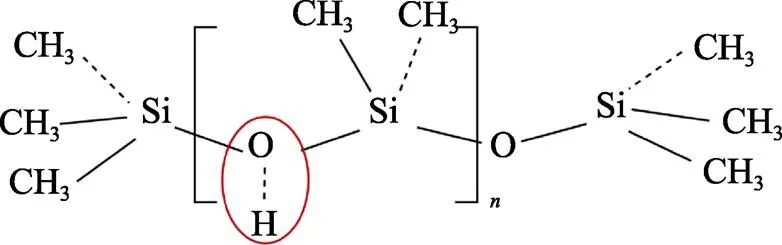
图9 聚二甲基硅氧烷结构
2.3 液滴在注液表面上黏附行为的主动控制方法
注液表面上的介质上电润湿试验结果如图10所示。当加载电压从0 V上升到60 V,微液滴的接触角维持在98.60°±0.34°,并没有明显的变化。电压继续增加电压到240 V,接触角从98.36°逐渐减小到87.98°。从试验结果可以看出,当外加电压在0~60 V区间时,微液滴接触角几乎不会发生改变,处于静态区(Ⅰ)。当外加电压大于60 V时,微液滴的接触角随电压的增加而减小,该区域为变化区(Ⅱ)。此外,当电压从240 V减小到0 V时,液滴接触角从89.12°增加到97.48°。结果表明,微液滴在注液表面上的接触角可以通过电压实现可逆调节。
不同加载电压下微液滴在注液表面的黏附性能如图11所示。当加载电压从0 V增加到240 V,润湿力从156 μN增加到322 μN,最大相互作用力从120 μN增加到约178 μN。分离力在0~120 V从85 μN减小到57 μN,电压继续增加到240 V,分离力维持在(59.11±6.51) μN,没有明显的减小趋势。
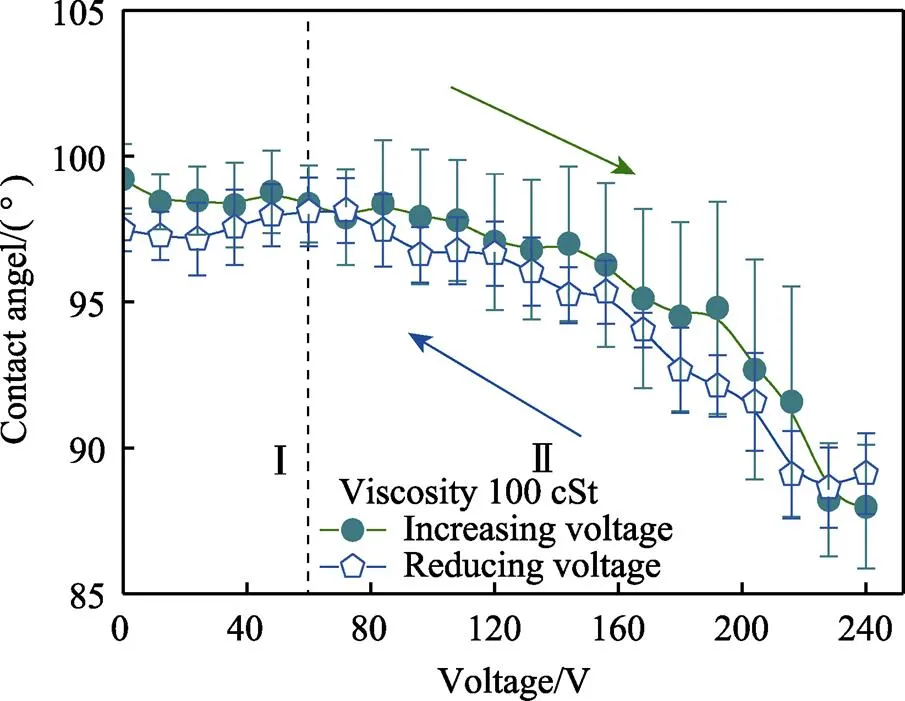
图10 微液滴在注液表面接触角随电压的变化曲线

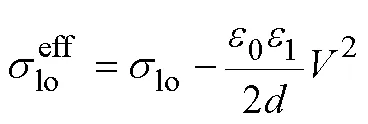
式中:σlo为油水界面能;V为施加的电压;ε0和ε1分别为真空介电常数和介电层的相对介电常数;d为介电层的厚度。在接触线附近,电场和电荷分布都会发生发散,产生的麦克斯韦应力达到最大值。通过对麦克斯韦应力在水平方向上的分量进行积分,可以得到作用在三相接触线上静电力[14]:

式中:η为电润湿数,与电压有关。可以发现,静电力与外加电压的平方成正比,会随着电压的增加而呈指数增加。此时,电压作用下注液表面的微液滴的力的平衡如图12所示。
在润湿阶段,电压会降低微液滴与注液表面的有效界面能,静电力会让微液滴更容易在表面铺展,接触线长度会随着电压的增加而增加,所以润湿力会随着电压的增加而增加,如图13所示。由于静电力F与电压的二次方呈正比,因此接触线长度的变化与电压成非线性关系。

图13 微液滴接触线长度与电压关系
此外,随着电压的增加,可以发现微液滴从注液表面分离时的最大力有所增加。微液滴与注液表面分离过程中,接触线在表面张力、拉普拉斯压力和静电力的作用下出现界面滑移,由于外加电压会增加接触线长度,因此液滴与注液表面分离时会消耗更多的能量,最大力会随着电压的增加而有所增加。
分离力的大小取决于微液滴与注液表面分离时的界面。在无电压作用下,微液滴与注液表面在界面处发生分离。在电压的作用下,微液滴在液桥发生断裂,随着电压的增加,液桥断裂的高度也增加,更多的液体在强的微液滴/注液表面作用下而留在注液表面,如图14所示。
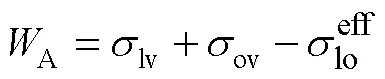
对于电压作用下微液滴与注液表面的相互作用过程,可以用黏附功A表示[27]:
将式(5)中的油-水界面有效界面能代入式(7),可得到加载电压作用下的黏附功V:
式中:ov为油气界面能;lv为水气表面能。
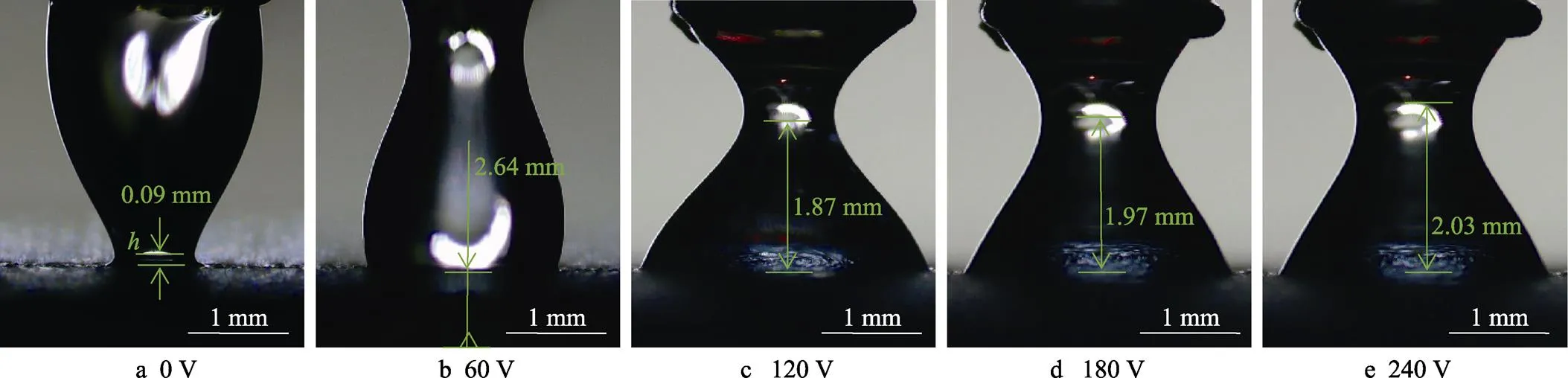
图14 液滴分离时液桥断裂高度随电压变化
无电压加载时黏附功D为:

因此可得到有加载电压与无加载电压下黏附功之间的关系:
可以发现,微液滴/注液表面的黏附功由2部分组成。第一部分与注液表面的物理化学性质有关,因此可以通过调节注液表面的物理化学性质,如黏度,调节界面黏附性能;第二部分与外加电压有关,通过增加或降低电压可以使液滴-注液表面黏附性能在一定范围内实现动态调节。
3 结论
本文研究了液滴/注液表面润滑油黏度和外加电压对黏附行为的影响机理,得出如下结论:
1)注液表面黏度从10 mm2/s增加到100 mm2/s,润湿力从194 μN减小到123 μN,最大相互作用力从129 μN减小到94 μN,分离力从101 μN减小到82 μN。随着注液表面润滑油黏度上升,润滑油内部的剪切力以及润滑油内的聚硅氧烷分子与水分子之间的氢键作用增加,阻碍了微液滴在注液表面的润湿与分离,导致了微液滴与注液表面间的相互作用力减小。
2)当电压从0 V增加到240 V时,润湿力从156 μN增加到322 μN左右,最大相互作用力从120 μN增加到178 μN左右。油水界面在电压作用下形成介质上电润湿系统,电压改变了油-水界面有效界面能,导致微液滴在注液表面上的黏附功增大,进而造成了润湿力与最大相互作用力增加。
3)本研究通过主/被动结合的方式实现了微液滴/注液表面润湿力在123 μN到322 μN范围内可调,最大相互作用力在94 μN 到178 μN范围内可实时动态调节。该研究为微流体控制系统的设计及微液滴精确控制提供了技术和理论指导。
[1] ZHAO Yan-hua, WU Yang, WANG Liang, et al. Bio-Inspired Reversible Underwater Adhesive[J]. Nature Communications, 2017, 8: 2218.
[2] HAO Chong-lei, LIU Ya-hua, CHEN Xue-mei, et al. Bioinspired Interfacial Materials with Enhanced Drop Mobility: From Fundamentals to Multifunctional Applications[J]. Small, 2016, 12(14): 1825-1839.
[3] LU Hao-jian, ZHANG Mei, YANG Yuan-yuan, et al. A Bioinspired Multilegged Soft Millirobot that Functions in both Dry and Wet Conditions[J]. Nature Communications, 2018, 9: 3944.
[4] YANG Si-min, WANG Jian-qiang, WANG Yang, et al. Interfacial Polymerized Polyamide Nanofiltration Membrane by Demulsification of Hexane-in-Water Droplets through Hydrophobic PTFE Membrane: Membrane Performance and Formation Mechanism[J]. Separation and Purification Technology, 2021, 275: 119227.
[5] BAI Xue, YANG Qing, FANG Yao, et al. Anisotropic, Adhesion-Switchable, and Thermal-Responsive Superhydrophobicity on the Femtosecond Laser-Structured Shape- Memory Polymer for Droplet Manipulation[J]. Chemical Engineering Journal, 2020, 400: 125930.
[6] WANG Dong-hui, JIANG You-hua, ZHU Zhang-lei, et al. Contact Line and Adhesion Force of Droplets on Concentric Ring-Textured Hydrophobic Surfaces[J]. Langmuir, 2020, 36(10): 2622-2628.
[7] LOU Xiao-ding, HUANG Yu, YANG Xian, et al. Lubricant-Infused Surfaces: External Stimuli Responsive Liquid-Infused Surfaces Switching between Slippery and Nonslippery States: Fabrications and Applications (Adv. Funct. Mater. 10/2020)[J]. Advanced Functional Materials, 2020, 30(10): 1901130.
[8] IANG Shao-jun, HU Yan-lei, WU Hao, et al. Multifunctional Janus Microplates Arrays Actuated by Magnetic Fields for Water/Light Switches and Bio-Inspired Assimilatory Coloration[J]. Advanced Materials, 2019, 31(15): 1807507.
[9] YAO Xi, JU Jie, YANG Shuai, et al. Temperature-Driven Switching of Water Adhesion on Organogel Surface[J]. Advanced Materials, 2014, 26(12): 1895-1900.
[10] WANG Jun-wei, MAO Bao-dong, GOLE J L, et al. Visible-Light-Driven Reversible and Switchable Hydrophobic to Hydrophilic Nitrogen-Doped Titania Surfaces: Correlation with Photocatalysis[J]. Nanoscale, 2010, 2(10): 2257-2261.
[11] KLOXIN C J, SCOTT T F, PARK H Y, et al. Mechanophotopatterning on a Photoresponsive Elastomer[J]. Advanced Materials, 2011, 23(17): 1977-1981.
[12] LI Yan, LI Jin-rong, LIU Li-wu, et al. Switchable Wettability and Adhesion of Micro/Nanostructured Elastomer Surface via Electric Field for Dynamic Liquid Droplet Manipulation[J]. Advanced Science, 2020, 7(18): 2000772.
[13] CHEN Long-quan, BONACCURSO E. Electrowetting- From Statics to Dynamics[J]. Advances in Colloid and Interface Science, 2014, 210: 2-12.
[14] MUGELE F, BARET J C. Electrowetting: From Basics to Applications[J]. Journal of Physics: Condensed Matter, 2005, 17(28): R705-R774.
[15] EPSTEIN A K, WONG T S, BELISLE R A, et al. Liquid-Infused Structured Surfaces with Exceptional Anti-Biofouling Performance[J]. Proceedings of the National Academy of Sciences of the United States of America, 2012, 109(33): 13182-13187.
[16] WARE C S, SMITH-PALMER T, PEPPOU-CHAPMAN S, et al. Marine Antifouling Behavior of Lubricant- Infused Nanowrinkled Polymeric Surfaces[J]. ACS Applied Materials & Interfaces, 2018, 10(4): 4173-4182.
[17] DOLL K, YANG I, FADEEVA E, et al. Liquid-Infused Structured Titanium Surfaces: Antiadhesive Mechanism to RepelBiofilms[J]. ACS Applied Materials & Interfaces, 2019, 11(26): 23026-23038.
[18] KIM P, WONG T S, ALVARENGA J, et al. Liquid- Infused Nanostructured Surfaces with Extreme Anti-Ice and Anti-Frost Performance[J]. ACS Nano, 2012, 6(8): 6569-6577.
[19] NGUYEN T B, PARK S, JUNG Y, et al. Effects of Hydrophobicity and Lubricant Characteristics on Anti- Icing Performance of Slippery Lubricant-Infused Porous Surfaces[J]. Journal of Industrial and Engineering Chemistry, 2019, 69: 99-105.
[20] MA Qiang, WANG Wei, DONG Guang-neng. Facile Fabrication of Biomimetic Liquid-Infused Slippery Surface on Carbon Steel and Its Self-Cleaning, Anti- Corrosion, Anti-Frosting and Tribological Properties[J]. Colloids and Surfaces A: Physicochemical and Engineering Aspects, 2019, 577: 17-26.
[21] BOINOVICH L B, EMELYANENKO K A, EMELYANENKO A M. Superhydrophobic Versus SLIPS: Temperature Dependence and the Stability of Ice Adhesion Strength[J]. Journal of Colloid and Interface Science, 2022, 606: 556-566.
[22] HAO Chong-lei, LIU Ya-hua, CHEN Xue-mei, et al. Electrowetting on Liquid-Infused Film (EWOLF): Complete Reversibility and Controlled Droplet Oscillation Suppression for Fast Optical Imaging[J]. Scientific Reports, 2014, 4: 6846.
[23] BAEK S, YONG K. Impact Dynamics on SLIPS: Effects of Liquid Droplet's Surface Tension and Viscosity[J]. Applied Surface Science, 2020, 506: 144689.
[24] SUN Yu-jin, JIANG You-hua, CHOI C H, et al. Direct Measurements of Adhesion Forces for Water Droplets in Contact with Smooth and Patterned Polymers[J]. Surface Innovations, 2017, 6(1): 1-52.
[25] BODAS D, KHAN-MALEK C. Hydrophilization and Hydrophobic Recovery of PDMS by Oxygen Plasma and Chemical Treatment—An SEM Investigation[J]. Sensors and Actuators B: Chemical, 2007, 123(1): 368-373.
[26] MAJI D, LAHIRI S K, DAS S. Study of Hydrophilicity and Stability of Chemically Modified PDMS Surface Using Piranha and KOH Solution[J]. Surface and Interface Analysis, 2012, 44(1): 62-69.
[27] BUTT H J, ROISMAN I V, BRINKMANN M, et al. Characterization of Super Liquid-Repellent Surfaces[J]. Current Opinion in Colloid & Interface Science, 2014, 19(4): 343-354.
Active/Passive Control and Mechanism of the Adhesion Behaviors of Droplet/Liquid-infused Surface
1,1*,2,1
(1. Key Laboratory of Testing Technology for Manufacturing Process, Ministry of Education, Southwest University of Science and Technology, Sichuan Mianyang 621010, China; 2. Key Laboratory of Icing and Anti/De-icing, China Aerodynamics Research and Development Center, Sichuan Mianyang 621000, China)
Controlling microdroplets has gotten wide attention due to its potential applications in drug delivery, microfluidic devices and lab on chip, etc. Recently, various methods were used to manipulate microdroplet. For example, surfaces were modified by coating with different surface energy, or by micro-structures to change the property of surface to manipulate microdroplet. These methods were classified as passive methods because the functions of the surface could not be changed when the surface was modified. Moreover, active methods, such as temperature, light, electricity, magnetism and mechanical stress, etc. were used to manipulate microdroplet dynamically. However, although the adhesion behavior at liquid/solid interface could be adjusted, some obstacles such as long response time, high energy consumption and droplet pollution, limited the application of those technologies. Therefore, a combined active and passive approach was required to manipulate microdroplets with fast response time, low energy consumption, and no pollution.
In this study, silicon chip with size of 20 mm×20 mm was used as substrate. To ensure the conductivity, the back of the silicon chip was ground with sandpaper to remove the oxide layer. Then, the silicon chip was coated by spraying superhydrophobic liquid. After drying for 1 h, the superhydrophobic film was formed. The liquid-infused surfaces were prepared by adding lubricating oil (polydimethylsiloxane) to the superhydrophobic surface. Droplet was placed on the oil-infused surface and then electrowetting system on the droplet/oil-infused surface was established with applied voltage. Lubricant with viscosity of 10 mm2/s, 50 mm2/s and 100 mm2/s and applied voltage (0-240 V) were used in this work. Moreover, the effect of oil viscosity and applied voltage on the droplet/oil-infused surface adhesion behaviors was investigated. The adhesion mechanisms under the coupling effects of lubricating oil viscosity and applied voltage were studied.
The adhesion force variation process could be described with snap-in force, maximum force and pull-off force. The snap-in force decreased from 194 μN to 123 μN, the maximum force decreased from 129 μN to 94 μN, and the pull-off force decreased from 101 μN to 82 μN when the liquid viscosity increased from 10 mm2/s to 100 mm2/s. Snap-in force increased from 156 μN to 322 μN, the maximum force increased from 120 μN to 178 μN and the pull-off force decreased from 85 μN to 53 μN when the applied voltage increased from 0 V to 240 V. Active control of the adhesion behaviors is achieved. It is indicated that the high-viscosity polydimethylsiloxane has strong internal shear force, however, the long chain will enhance the hydrogen at the droplet/liquid-infused surface. Consequently, the snap-in force, the maximum force and the pull-off force decrease with viscosity. Moreover, the effective interface energy varies nonlinearly with the voltage, realizing real-time adjustment of the adhesion force of the droplet/liquid-infused surface. The adhesion behaviors of droplet/liquid-infused surface can be actively/passively controlled by changing the voltage and the viscosity of the lubricant. Results help to provide theoretical and technical guidance for development of a new micro-droplet controlling method.
microdroplet; liquid-infused surface; adhesion; electrowetting; interface adjustment
2022-10-13;
2023-01-17
TH136
A
1001-3660(2023)10-0304-09
10.16490/j.cnki.issn.1001-3660.2023.10.026
2022-10-13;
2023-01-17
四川省科技厅项目(2022ZHCG0050);中国空气动力研究与发展中心结冰与防除冰重点实验室开放课题(IADL20210103,IADL20210403)
Science and Technology Department of Sichuan Province (2022ZHCG0050); Key Laboratory of Icing and Anti/De-icing, China Aerodynamics Research and Development Center (IADL2021110103, IDAL20210403)
张学仁, 张亚锋, 顾兴士, 等.微液滴/注液表面黏附行为的主被动控制及机理[J]. 表面技术, 2023, 52(10): 304-312.
ZHANG Xue-ren, ZHANG Ya-feng, GU Xing-shi, et al. Active/Passive Control and Mechanism of the Adhesion Behaviors of Droplet/Liquid- infused Surface[J]. Surface Technology, 2023, 52(10): 304-312.
通信作者(Corresponding author)
责任编辑:刘世忠
