内河大型散货智慧港口规划及关键技术
2023-11-04汤文治尹政兴王立平郭云山
汤文治,尹政兴,王立平,郭云山
(长江勘测规划设计研究有限责任公司,湖北 武汉 430010)
0 引言
内河大型散货码头作为国家腹地的区域物流枢纽,是内陆城市经济发展的重要驱动力量[1]。近年来,随着河砂开采限制政策的落地,船舶大型化趋势的发展[2],以及国家对散货码头环保要求的进一步提高[3],传统的粗犷式小微码头逐步退出历史舞台,专业化的内河大型散货码头建设需求激增。恰逢国家发布交通强国战略,推进建设世界一流港口的重要窗口时期,内河大型散货码头开启了建设智慧港口的探索热潮。
智慧港口的概念从提出至今已有近15年,首批得到发展的是沿海的大型集装箱港口[4],国内散货港口智慧化升级相较于前者,存在明显的发展滞后,主要原因之一在于内河港口通常规模较小,整体投资较低。为了节省投资,各建设单位在建设初期根据自身需求仅考虑了港口的部分智慧化,包括基于图像识别的码头智慧监控系统[5],基于数字孪生技术的智慧料场系统[6],全自动智能作业系统[7],码头生态智慧监测系统[8],基于5G通信技术的智慧港口[9],干散货装卸船自动控制系统[7]等。这些建设方案大部分仅研究了码头某些功能的智慧化升级改造,没有站在全局的角度对智慧港口进行全面统筹规划,导致后期升级改造的难度和代价很高。
本文以长江中部沿岸某大型散货码头为研究对象,分析了该码头建设智慧港口的主要目标,从总体设计出发,论述了智慧港口的主要技术架构和方案框架,并根据港口实际需求,对建设方案进行了详细的规划设计。通过本规划设计,力争将该码头打造成国内领先的智慧港口建设标杆工程,为其他类似项目提供重要的技术参考。
1 功能目标分析
本文所研究的大型散货码头采用高桩梁板结构,建设3个5 000吨级散货泊位,设计年通过能力达到1 750万t/Y,兼具散货进出口功能,装卸工艺采用2台3 000t/h直线轨道式装船机进行散货的出口装船作业,散货卸船采用2 台800t/h抓斗卸船机,水平运输统一采用带式输送机,陆域仓库内的散货堆存采用斗轮堆取料机。
对该码头进行智慧港口建设方案规划设计时,首先要充分考虑码头的主要功能需求和装卸工艺流程,结合现有技术条件和建设成本,基于模糊综合评价法[10]来确定智慧港口的主要建设目标,具体包括以下5点:
(1)全面感知。全面感知是智慧港口建设的基础,是实现各项自动化控制和智能决策的前提条件。依托于各种传感设备和技术,实现对港区的船舶、装卸设备、皮带机系统、货物堆存状态、货场利用状态、作业人员等的全面、实时感知。
(2)智能决策。智慧港口应具备一定程度的智能,能够根据感知得到的信息来进行决策和任务规划。人工智能还应具有自主学习和纠错能力。
(3)自主装卸。装卸设备要具有对周边作业环境的感知能力、逻辑判断和执行能力,能够根据上级系统分配的作业任务,自主的完成单项作业任务。
(4)信息共享。智慧港口应是开放的、共享的信息交互平台,不仅要实现港内设备、人员之间的信息交流共享,还应实现港口与货主、船代等其他物流参与方的信息共享。此外,信息还应在不同的终端上进行共享,包括网页、客户端、手机App等。
(5)产业创新。以智慧港口建设为契机,打造区域物流枢纽,延伸物流产业链,发展金融、商贸等现代服务,推动周边区域的经济发展和产业创新。
2 总体规划
2.1 智慧港口技术架构
智慧港口是新时代交通强国战略的重要支撑,是将现代化港口的设施设备、物流信息以及参与人员,通过物联网、云计算、5G互联网、大数据、人工智能等新技术手段进行有机的串联统筹,以全面感知、智能决策、自主装卸、信息共享、产业创新等为目标,实现港口各种资源要素的优化配置、各功能模块的协同联动,以及人与人、人与港口、物与物之间的各环节广泛互通的现代物流枢纽。
智慧港口的实施离不开各种工业技术的支撑,在技术层面由底层至顶层主要包含7大层次:设备层、感知层、网络层、数据层、技术层、应用交互层以及用户层。各层级之间使用统一的数据规范进行通信,技术框架如图1所示。

图1 智慧港口技术框架
2.2 智慧港口总体方案框架
智慧港口的建设方案要根据工程需求进行规划设计,采用行业领先的模块化设计理念规划建设方案,以更好的适应不同的工程实际,满足港口不同业务差异化发展的需求。
根据本码头的智慧港口的建设目标和技术框架,结合码头对装卸作业、物流规划、船舶调度、港区管理、作业计划、商务扩展等业务的实际需求,提出了“1+4+N”总体规划方案。
码头建设1个总体的智慧港口信息管理与应用系统,根据业务功能不同划分4个港口运营管理平台,包含智慧港区管理平台、智慧物流平台、智能船舶调度平台和智慧商务平台。每个平台下按需设置多样性的应用模块,满足码头不同功能需求,各应用模块之间相互独立,除了部分基础功能模块外,其他扩展模块可以根据业务需求自由添加或者删减。智慧港口总体方案框架结构如图2所示。
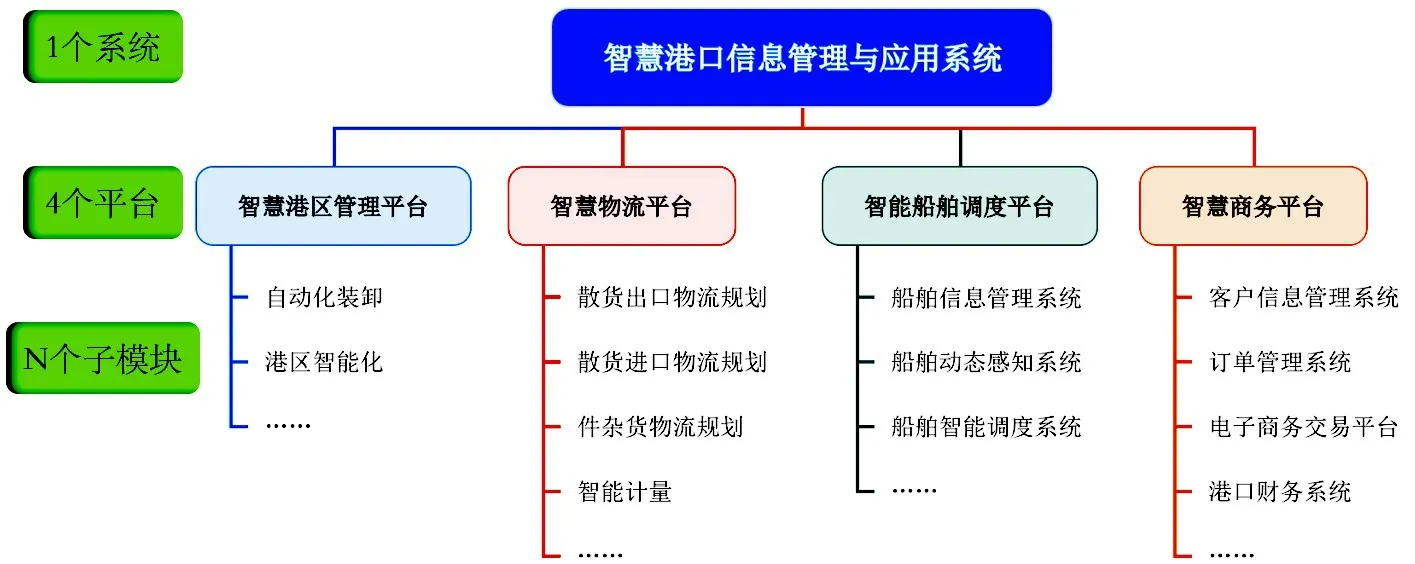
图2 智慧港口总体方案框架
3 方案设计
3.1 智慧港区
智慧港区设计是智慧港口规划的核心任务,根据功能模块划分,智慧港区模块设计的主要目标有两个:(1)实现各种装卸机械的作业自动化;(2)实现港内生产辅助设施设备的智慧化。
对于装卸机械作业的自动化设计,本工程采用国内领先的自动化控制技术方案,并结合项目的实际需求,采用散货装卸全流程的自动化解决方案,即码头前沿的装船机、卸船机以及陆域仓库内的堆取料机能够根据管理系统下发的作业计划或者自行编制的作业计划,基于3D激光扫描重构技术精准识别定位船舱轮廓、仓库轮廓以及料堆轮廓,实现装卸船作业和堆取料作业的自动化。带式输送机控制系统接入智慧港区管理系统,获取当前装船机、卸船机以及堆取料机的作业状态和计划,与三大主机实现联动作业控制。
港区生产辅助智慧化也是智慧港区设计的重要组成部分,采用AI视频实时分析技术,对港区内的监控视频数据进行实时分析处理,评估人员行为、车辆行使和设备作业的碰撞安全风险。对危险行为进行灯光以及广播报警,必要时紧急介入设备的控制模块,操控设备紧急停车。通过划定电子围墙,识别未授权人员进入风险,配合门禁系统等确保进入作业区域的维修、巡检、监护等人员的安全。此外安防系统还能识别人员穿戴风险、识别火焰、油污、烟雾风险并根据风险等级启动应急预案。此外,本工程还在主要作业区域安装有环境监测传感器,实时上传环境数据至管理系统,并与喷淋除尘系统联动控制,实现智能抑尘。
3.2 智慧物流
智慧物流设计采用可视化技术,实现散货物料的全流程跟踪,其主要内容是对港区的散货状态、流量流向等物流信息进行管理,并对各作业段的装卸及运输设备进行作业调度规划,结合大数据技术,制定最优的设备作业计划表,实现码头生产效率的最大化。
堆场采用数字化技术进行管理,结合订单数据以及港口作业计划数据,对料堆进行扫描建模,实时统计堆场料堆信息,包括料堆货种、来源、总质量/容量、占用堆场面积、已堆存/预计堆存时间等信息,对物料质量和作业任务进行管理;对物料流动情况进行实时跟踪;通过可视化图形显示料堆分布和堆场空余空间,提高堆场利用率。
智慧物流的实施,能够辅助甚至替代生产计划人员对港区的生产任务进行规划,有效降低人力成本,提高整个港区的通过能力。
3.3 智能船舶调度
装卸船业务是港口的主要业务之一,掌握靠港船舶实时动态的位置信息、航行信息、船舶参数等关键信息,是实现智能调度的基础。依托于码头水域船舶交通管理系统(VTS)、船舶自动识别系统(AIS)、甚高频通信系统(VHF)、北斗定位系统以及船舶靠离泊作业指引系统等,建设港区船舶动态感知调度系统,对提高本码头的整体作业效率和运营服务水平,保障码头通航和作业安全具有重要意义。
智能船舶调度系统与智慧物流系统相结合,能够有效降低船舶到锚靠泊等待时间,基于人工智能技术,实现船舶调度排队最优化。该系统还能运行于手机等便携移动终端,方便港、船协同交互。
3.4 智慧商务
智慧商务是基于互联网、大数据技术、云计算以及智能移动终端等信息技术手段,创新商业管理模式,以客户满意度为导向,通过对海量商务数据的分析,充分服务现有客户、不断吸引潜在客户,基于不同用户需求提供定制化服务。
建立客户信息管理系统,采用评分制对客户进行分级是智慧商务建设的首要任务。通过客户分级发掘优质客户,对不同星级客户提供差异化服务以实现港区资源配置的最优化。基于大数据技术分析客户行为偏好,并根据客户属性智能推送相关服务信息,不断开拓客户需求。
此外,在线订单管理系统以及电子商务交易平台也是智慧商务建设的重点工程,可以根据实际情况,按需规划发展订单“无纸化”、审批网络化、交易电子支付、金融保险等服务,提高码头智慧水平。
4 关键技术应用及实施效果
4.1 激光扫描及3D重构技术
激光扫描及3D模型重构是散货港口自动化作业的核心技术,它相当于设备的“眼睛”,实现对装卸作业对象的基本空间物理信息的识别。
三维激光扫描是一项较为成熟的测绘技术,主要运用了激光测距原理,通过测量物体表面大量的密集点的三维坐标,可快速得到被测物体的表面轮廓空间信息。其应用的难点在于对散货物料边界和仓库或者船舱边界的识别划分。
通过预先建立仓库/船舱边界的初始数据模型,将后续每次采集的点云数据与初始数据模型进行布尔运算,从而能够得到实时的散货物料轮廓数据信息,实现对散货物料的3D重构。
4.2 基于AI技术的视频实时分析
利用港区布设的视频监控设备,实现对港口的无死角监控,在AI技术的支撑下,能够完成对监控视频的实时在线分析评估,包括碰撞检测、安防、环保等一系列预设的判定准则。
AI视频分析技术主要包括对象分析、属性分析、行为识别以及时序分析四大类。对象分析技术以目标检测技术和目标追踪技术为核心,通过图像特征识别和提取技术实现对目标的识别和定位,在时序视频帧上实时检测目标并对数据进行关联以实现对目标的连续追踪。属性分析技术赋予目标基本的物理属性,包括颜色、形状、尺寸等信息。动作行为识别是在图像识别的基础上,对时间序列进行建模,从而能够预测目标在当前时刻或一段时间内的状态。时序分析技术完成对目标事件的时序定位,记录事件关键词以及起止时间,方便对事件的回溯检索。
4.3 大数据技术实现最优调度
港口的作业调度涉及到设备、人员、船舶、堆场等众多要素,合理的制定作业计划、发布调度指令并实时监测任务执行情况是降低生产成本,保障港口高效运行的必要条件。
采用大数据技术搭建港区所有参与要素的关系网络拓扑结构,优化调度规则,建立任务管理体系并规范任务处理流程,引入决策表实现任务属性的约简,并采用模糊综合评价方法作为调度效果的主要评价手段,通过大量数据的不断迭代优化,使系统逐步成长完善,最终代替人工实现港口作业计划的最优解。
4.4 系统实施效果
智慧港口信息管理与应用系统是整个散货港口的信息集成中心,根据前文确定的各项规划指标和技术条件。
该系统的实施预计能够减少各类作业和操作人员60%,节省装卸成本30%,极大地提高整个散货码头的智能化水平,达到建设智慧绿色港口,提高码头的整体作业效率,降低装卸成本的核心目标。
5 结语
本文以国内某大型散货码头工程为研究对象,分析了该码头建设智慧港口亟需实现的主要目标,并以建设目标为规划导向,对智慧港口总体框架、详细设计方案和关键技术等进行了深入研究。具体包括以下内容:
(1)明确了散货码头智慧港口规划设计的4大主要内容,提出了智慧港口模块化设计理念,制定了“1+4+N”的总体规划方案,以满足不同项目对智慧港口建设方案的差异化需求。
(2)分析了大型散货智慧港口赖以实现的主要关键技术以及这些技术在智慧港口建设中的具体应用场景和应用方法。
(3)介绍了智慧物流、智能船舶调度以及智慧商务等基础模块的实现方法,通过对码头的全面智慧化升级改造,能够有效提高码头的生产效率,为客户提供更加优质的综合服务。
(4)对散货智慧港口信息管理与应用系统的组成和功能模块进行了深入规划设计,形成了较为完整的系统程序,对相似工程的建设具有重要指导意义。
